







专利摘要
本发明公开了一种基于肌电的机械手动作速度比例控制方法;首先,通过肌电采集仪采集尺侧腕伸肌和桡侧腕屈肌的表面肌电信号,通过能量阈值法确定动作的起始位置和终止位置作为动作肌电信号,提取信号的平滑窗平均功率;用小波分析法对原始表面肌电信号进行多尺度分解,提取信号多尺度模糊熵特征,并和平均功率组成特征向量输入扩展的K最近邻模型分类器,识别手部动作,同时通过正交多项式拟合操作者与机械手动作速度,最终控制机械手以相应的速度完成相应的动作。本发明提高了人机交互的自然性和主动性,从而提高了操作的准确性和便捷性,降低了机械手操作的危险等级,使机械手可以完成相对复杂、危险的任务。
权利要求
1.一种基于肌电的机械手动作速度比例控制方法,其特征在于:该方法包括如下步骤:
步骤(1),通过肌电采集仪采集尺侧腕伸肌和桡侧腕屈肌的表面肌电信号;通过能量阈值法确定动作的起始位置和终止位置作为动作肌电信号;
步骤(2),提取两路表面肌电信号的平滑窗信号平均功率;平滑窗信号平均功率计算如下:
步骤(3),将两路表面肌电信号进行多尺度小波分解,分解出4个细节分量D1,D2,D3,D4;
步骤(4),将两路肌电信号的平滑窗信号平均功率,以及两路肌电信号小波分解后的4个细节分量的多尺度模糊熵组成10维特征向量;
步骤(5),将10维特征向量输入扩展的KNN分类器进行手部动作识别;针对10维肌电信号特征向量,扩展的KNN分类器的设计如下:
1)用聚类方法从每个类别中找出m个代表点,构成模型簇;模型簇的四元组表示形式为:{Cls(d
2)为使分类器具有增量学习能力,在分类过程中,对于经模式识别得到验证的样本点,按距离度量最近的原则加到已有的簇中,不能识别的样本点,则在模型簇中重建四元组;
3)计算待分类样本与各类代表点的距离;在确定待分类样本的类别时,让权重系数
步骤(6),对肌电信号平滑窗信号平均功率与动作速度用正交多项式进行拟合,建立比例控制模型;具体如下:
1)模型方程为:y=f(w)=A
2)将模型方程y=f(w)=A
3)使函数集{P
4)根据式y=a
步骤(7),把步骤(5)的识别结果转化为机械手具体动作的控制指令,根据步骤(6)的比例模型求得的比例系数控制机械手动作速度。
说明书
技术领域
本发明涉及一种机械手动作速度比例控制方法,特别地,涉及基于肌电的机械手动作速度比例控制。
背景技术
利用操作者肢体上的表面肌电信号(Surface ElectromyoGram,sEMG)来控制机械手,具有动作自然,仿生性能好的特点,是人--机交互系统理想的控制信号源。国内外有许多学者进行肌电控制的研究。美国马萨诸塞州伍斯特理工研究所的Koirala.k等利用肌电信号预测人体运动肌肉组活动规律,应用sEMG信号估计假肢关节转矩。英国基尔大学医学科学与技术研究所的Blana D等针对截肢患者设计了一具肌肉骨骼模型,利用残肢上获取的sEMG信号控制假肢手腕的自然转动。美国沃尔特里德国家军事医学中心的Pasquina P F等则采用植入式肌电传感器采集肢体活动产生的肌电信号,实现了三自由度假肢的自主控制。国内吴常铖等提出了一种基于sEMG的自适应学习的动作识别方法,同时结合模糊神经网络PID控制算法实现肌电信号对假手的控制。
将sEMG信号用于遥操作系统的遥操作,这种方法直接提取人体的表面生物电信号来传递操控者的动作信息。但是,多运动模式肌电控制研究的实用性并不理想,其关键问题是多运动模式识别和运动控制的准确性有待于进一步提高。目前,大多数实现机械手的比例控制用的是最小二乘拟合。可是当低阶模型达不到拟合效果需要建立高阶模型的时候,最小二乘法就变得不再精确了,残差平方和也随模型阶数增加而呈现指数级的变化。同时低阶模型中的最小二乘法求解通常能满足控制的实时性要求,而当高阶模型中矩阵求逆或出现病态矩阵时,时间复杂度就会大大的提高。
发明内容
本发明为实现机械手的自然仿生控制,基于操作者表面肌电信号的手部动作模式识别及速度相关参数提取方法,实现控制机械手相应的动作和速度。首先,通过肌电采集仪采集尺侧腕伸肌和桡侧腕屈肌的表面肌电信号,通过能量阈值法确定动作的起始位置和终止位置作为动作肌电信号,提取信号的平滑窗平均功率。然后,用小波分析法对原始表面肌电信号进行多尺度分解,提取信号多尺度模糊熵特征,并和平均功率组成特征向量输入扩展的K最近邻模型分类器,识别手部动作,同时通过正交多项式拟合操作者与机械手动作速度,最终控制机械手以相应的速度完成相应的动作。
为了实现以上内容,本发明方法主要包括以下步骤:
步骤(1),通过肌电采集仪采集尺侧腕伸肌和桡侧腕屈肌的表面肌电信号;通过能量阈值法确定动作的起始位置和终止位置作为动作肌电信号;
步骤(2),提取两路表面肌电信号的平滑窗信号平均功率;平滑窗信号平均功率计算如下: x(i)为采集到的肌电动作信号,i=1,2,…,N,N为信号长度,L为平滑窗的窗口长度;
步骤(3),将两路表面肌电信号进行多尺度小波分解,分解出4个细节分量D1,D2,D3,D4;
步骤(4),将两路肌电信号的平滑窗信号平均功率,以及两路肌电信号小波分解后的4个细节分量的多尺度模糊熵组成10维特征向量;
步骤(5),将10维特征向量输入扩展的KNN分类器进行手部动作识别;针对10维肌电信号特征向量,扩展的KNN分类器的设计如下:
1)用聚类方法从每个类别中找出m个代表点,构成模型簇;模型簇的四元组表示形式为:{Cls(di),Sim(di),Num(di),Rep(di)}其中di为样本类别的中心点或代表点,Cls(di)表示数据点的类别;Sim(di)为类别所覆盖区域半径;Num(di)为类别所覆盖样本点的数目;Rep(di)则为该类别所有样本数据形成的串;
2)为使分类器具有增量学习能力,在分类过程中,对于经模式识别得到验证的样本点,按距离度量最近的原则加到已有的簇中,不能识别的样本点,则在模型簇中重建四元组;
3)计算待分类样本与各类代表点的距离;在确定待分类样本的类别时,让权重系数 乘每一个代表点;由加权后的数据确定待识别样本的类别;
步骤(6),对肌电信号平滑窗信号平均功率与动作速度用正交多项式进行拟合,建立比例控制模型;具体如下:
1)模型方程为:y=f(w)=A0 P0(w)+A1P1(w)+...+AmPm(w)其中Pm(w)为多项式函数,Am为系数,m是多项式的次数,变量w为临时自变量;设真正的动作速度自变量为x,则w与x之间的关系是简单的线性变换,即 式中x0为自变量的最小值,h为间距;
2)将模型方程y=f(w)=A0P0(w)+A1P1(w)+...+AmPm(w)代入残差平方 可得 为使该误差值EM最小,将其两边微分得到方程组 其中0≤j≤m,将求和计算分配到方程组各项,且合并同类项后可得m+1个联立方程;
3)使函数集{Pm(wi)}满足正交条件,求解m+1个联立方程可得系数
4)根据式y=a0+a1x+...+amx
步骤(7),把步骤(5)的识别结果转化为机械手具体动作的控制指令,根据步骤(6)的比例模型求得的比例系数控制机械手动作速度。
本发明与已有的下肢运动模式识别相比,具有如下特点:
将sEMG信号用于机械手的比例控制操作,这种方法直接提取人体的表面生物电信号来传递操控者的动作信息,提高了人机交互的自然性和主动性,从而提高了操作的准确性和便捷性,降低了机械手操作的危险等级,使机械手可以完成相对复杂、危险的任务。使用正交多项式拟合可以降低时间复杂度,可满足实时性要求较高的遥操作机械手控制要求。。
附图说明
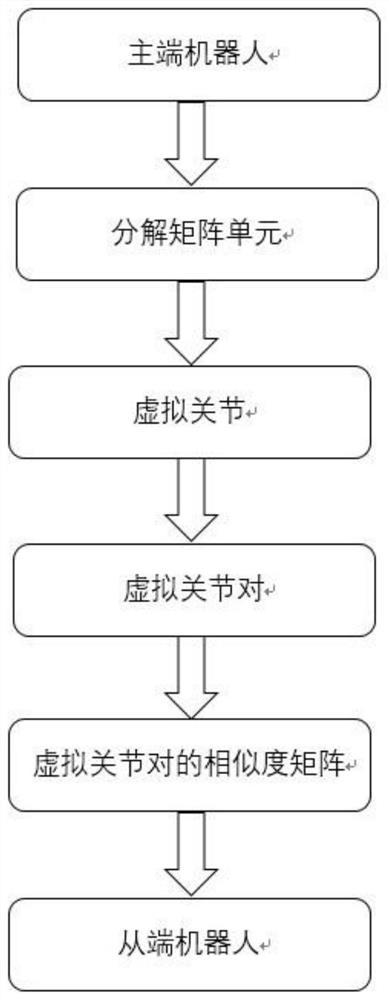
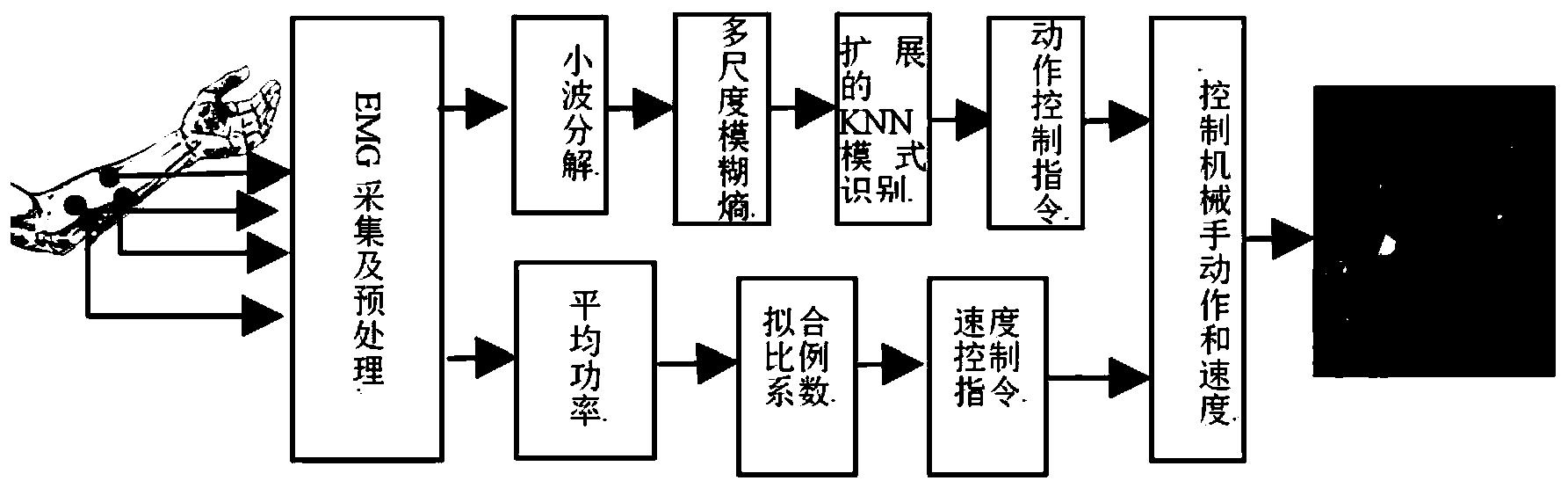
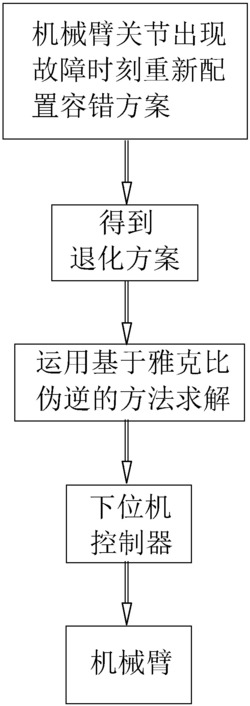
图1为本发明的实施流程图;
图2为尺侧腕伸肌表面肌电信号小波分解;
图3为实验数据与拟合效果图;
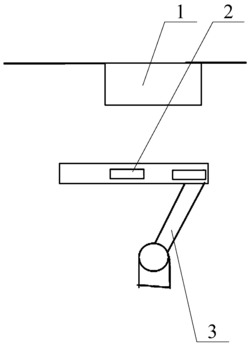
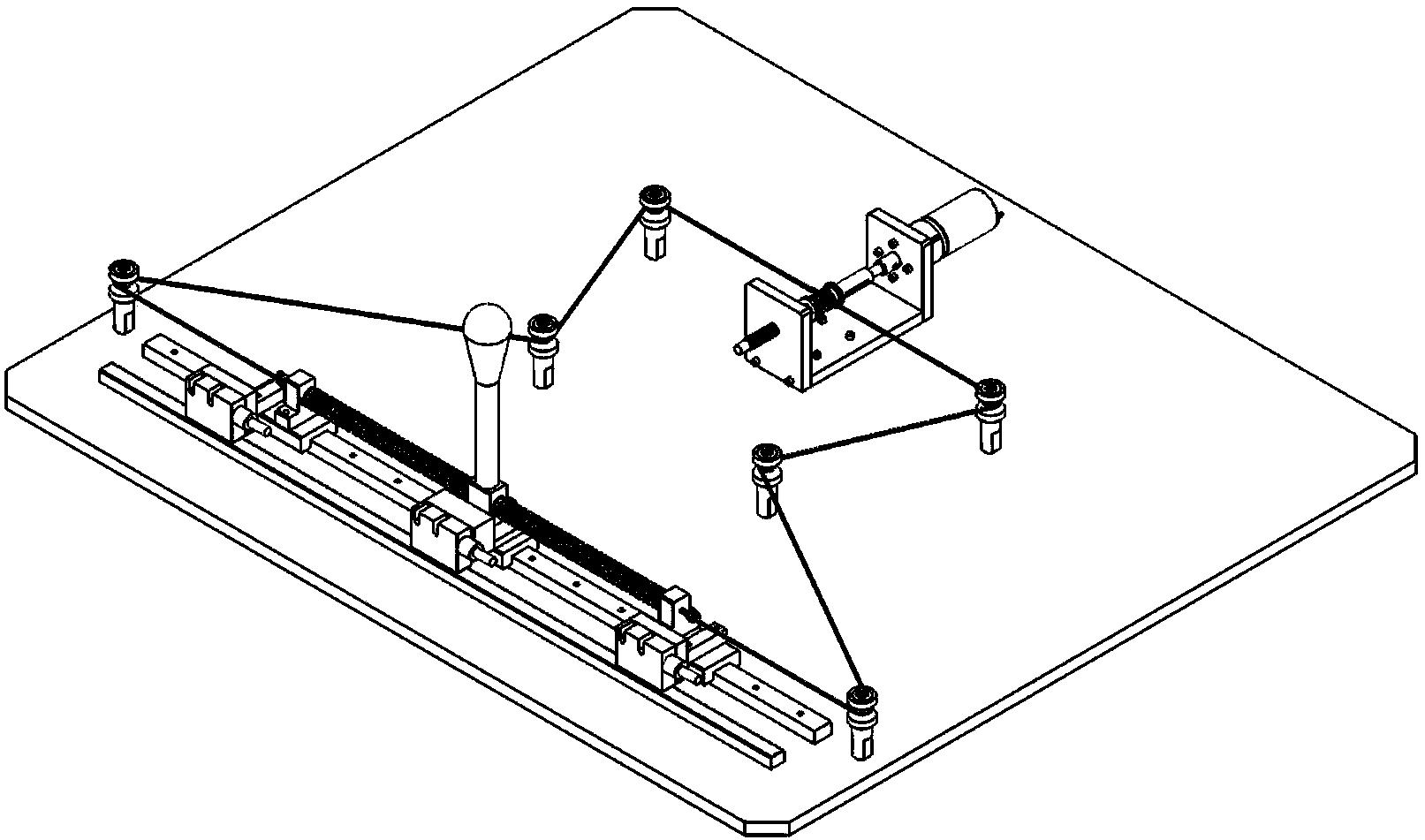
图4为机械手动作和速度控制实验。
具体实施方式
下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程。
如图1所示,本实施例包括如下步骤:
步骤(1),通过肌电采集仪采集尺侧腕伸肌和桡侧腕屈肌的表面肌电信号。通过能量阈值法确定动作的起始位置和终止位置作为动作肌电信号。具体过程如下:
实验操作者为三名健康的男子,实验前一周没有剧烈运动。实验通过美国Noraxon公司的mt400肌电采集仪采集四个动作的尺侧腕伸肌和桡侧腕屈肌SEMG信号。采样频率1000Hz,通过能量阈值法确定动作开始时刻,取每路肌电信号后续的2000个采样点。
步骤(2),提取两路表面肌电信号的平滑窗信号平均功率(SWAP)。
步骤(3),将两路表面肌电信号进行多尺度小波分解,分解出4个细节分量D1,D2,D3,D4。图2所示为伸拳动作尺侧腕伸肌的原始数据及4个小波细节分量。
步骤(4),将两路肌电信号的平滑窗信号平均功率,以及两路肌电信号小波分解后的4个细节分量的多尺度模糊熵组成10维特征向量。
步骤(5),将10维特征向量输入扩展的KNN分类器进行手部动作识别。具体如下:
采集四类动作伸拳、握拳、腕屈、腕伸所对应的两块肌肉的sEMG信号,每个动作重复50次,将采集两块肌肉的50组数据进行多尺度分解,分别计算原始信号以及每个动作多尺度模糊熵,每个动作对应的两个通道的模糊熵特征和平均功率特征组成10维特征向量,输入扩展的KNN分类器。从中选取25组数据作为训练样本,剩余25组数据作为待识别样本,首先将训练样本根据KNN得到分类模型,然后将待识别的测试样本根据K近邻分类模型进行识别。通过10次交叉验证的方式,对K取不同值时进行了实验,当K取值2时分类效果最好。
步骤(6),对肌电信号平滑窗信号平均功率与动作速度用正交多项式进行拟合,建立比例控制模型。具体如下:
设拟合函数为y=af1(x)+bf2(x)+cf3(x),其中y为肌电信号的平滑窗信号平均功率,f(x)为含有速度x的多项式函数,根据图3的数据用正交多项式可得拟合曲线。y=-0.9129x
此拟合方法可以实现sEMG信号的平均功率与速度的比例控制。为了定量分析,引入残差平方和(RSS)及运行拟合过程所用时间作为评价标准。
根据RSS公式:
式中:xi是采集第i次数据时刻的速度,yi为平均功率,N为数据的长度。并和最小二乘拟合进行比较,结果如表1所示:
表1 两种拟合方法的数据比较
通过表1数据可以得出以下结论:二阶模型时最小二乘法的RSS与正交多项式RSS相差很小,可是运算时间比正交多项式长了很多,也就是运算量比正交多项式要复杂的多,当高阶模型中矩阵求逆时,计算复杂度就会大大的提高,所以说正交多项式是比较好的选择。
为了验证通过正交多项式拟合曲线可以实现对机械手遥操作的可行性以及准确性,让机械手以1.5(m/s)、2(m/s)、2.5(m/s)、3(m/s)的速度进行张开与合拢作为实验验证标准。通过正交多项式拟合曲线分别得到该速度对应的肌电信号平均功率控制机械手实现张开与合拢,通过对比验证了该方法可以实现手部动作与机械手臂动作速度的一致性。
步骤(7),把步骤(4)的识别结果转化为机械手具体动作的控制指令,根据步骤(6)的比例模型求得的比例系数控制机械手动作速度。如图4所示,系统启动后,采集操作者伸拳、握拳、腕屈、腕伸所对应的肌肉的肌电信号,在控制软件平台下进行实时控制实验。
一种基于肌电的机械手动作速度比例控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0