









专利摘要
本发明公开一种柔性微动操作机构,基于五杆机构,其特征在于该机构包括:两个压电陶瓷驱动器、两个球形接头、三个“7”字形短柔性链、一个刚性连接块、一个柔性平行四边形结构、一个动平台、一个“7”字形长柔性链、一个刚性支撑框和一个底座;刚性支撑框内部按照柔性结构分布要求挖空,除底座外,各部分结构均设计在刚性支撑框空腔的内部,球形接头安装在压电陶瓷驱动器的顶端,压电陶瓷驱动器的尾端通过螺纹刚性固定于刚性支撑框的侧壁上,且使球形接头顶在“7”字形短柔性链腰部,构成赫兹接触;“7”字形短柔性链由两个竖直短梁和其中间的一个“7”字形刚性短梁构成;动平台为半圆形结构,轮廓分为线性侧壁和弧形侧壁两部分。
权利要求
1.一种柔性微动操作机构,基于五杆机构,其特征在于该机构包括:两个压电陶瓷驱动器、两个球形接头、三个“7”字形短柔性链、一个刚性连接块、一个柔性平行四边形结构、一个动平台、一个“7”字形长柔性链、一个刚性支撑框和一个底座;
所述刚性支撑框内部按照柔性结构分布要求挖空,除所述底座外,上述各部分结构均设计在所述刚性支撑框空腔的内部,所述刚性支撑框四个边角位置设置四个通孔,刚性支撑框左、右两侧壁上各开有一个通孔,用于放置所述压电陶瓷驱动器,所述球形接头安装在压电陶瓷驱动器的顶端,压电陶瓷驱动器的尾端通过螺纹刚性固定于刚性支撑框的侧壁上,且使球形接头顶在“7”字形短柔性链腰部,构成赫兹接触;
所述“7”字形短柔性链均由两个竖直短梁和其中间的一个“7”字形刚性短梁构成,两个竖直短梁自上而下分布,每个竖直短梁上左右对称开有两组半圆凹槽,每组半圆凹槽为两个,左右对称分布在竖直短梁左右两个侧壁上,三个所述“7”字形短柔性链结构相同,但其中两个设置在所述刚性支撑框内部的左侧,命名为左一短柔性链,左二短柔性链,另外一个设置在所述刚性支撑框内部的右侧,命名为右侧短柔性链,所述左一短柔性链和左二短柔性链相互平行,方向一致,所述右侧短柔性链与所述左二短柔性链关于所述刚性支撑框中部矩形块下边缘中线左右对称分布,所述左一短柔性链和左二短柔性链上部的竖直短梁位于所述“7”字形刚性短梁上方,上端连接于所述刚性连接块的下侧面,下端连接于所述“7”字形刚性短梁的上侧面,下部的竖直短梁位于所述“7”字形刚性短梁下方,上端与所述“7”字形刚性短梁尾部连接,下端连接于所述刚性支撑框空腔内侧壁上,所述右侧短柔性链上部的竖直短梁位于所述“7”字形刚性短梁上方,上端连接于所述“7”字形长柔性链下端,下端连接于所述“7”字形刚性短梁的上侧面,下部的竖直短梁位于所述“7”字形刚性短梁下方,上端与所述“7”字形刚性短梁尾部连接,下端连接于所述刚性支撑框空腔的内侧壁上;
所述刚性连接块为三角形结构,刚性连接块的下部边缘与所述两个左侧“7”字形短柔性链上端相连,刚性连接块的右侧边缘与所述柔性平行四边形结构相连,刚性连接块的左侧边缘闲置;
所述柔性平行四边形结构设置在所述刚性连接块和所述动平台之间,柔性平行四边形结构倾斜放置,与所述刚性支撑框下边缘夹角为45°,柔性平行四边形结构左下端连接于所述刚性连接块右侧边缘,右上端连接于所述动平台线性侧壁上,所述柔性平行四边形结构由相互平行的两个倾斜梁组成,分别命名为左倾斜梁和右倾斜梁,所述两个倾斜梁与所述刚性支撑框下边缘夹角均为45°,所述左倾斜梁的上端左右对称开有两个半圆凹槽,所述左倾斜梁的下端也左右对称开有两个半圆凹槽,所述右倾斜梁与所述左倾斜梁结构一致,所述右倾斜梁的上端左右对称开有两个半圆凹槽,所述右倾斜梁的下端也左右对称开有两个半圆凹槽,所述四组半圆凹槽尺寸一致;
所述“7”字形长柔性链位于所述动平台和所述右侧“7”字形短柔性链之间,“7”字形长柔性链从上而下由一个开有半圆凹槽的竖直短梁和一个“7”字形刚性长梁构成,竖直短梁左右对称开有两个半圆凹槽,位于“7”字形刚性长梁左端,竖直短梁上端与动平台连接,下端连接于“7”字形刚性长梁左端上侧面,“7”字形刚性长梁左端与所述竖直短梁连接,下端尾部与右侧“7”字形短柔性链上端连接;
所述动平台为半圆形结构,动平台轮廓分为线性侧壁和弧形侧壁两部分,弧形侧壁长度为半圆圆周长度,线性侧壁长度相当于圆的直径长度,所述动平台线性侧壁与所述柔性平行四边形结构相连,所述动平台右下部弧形侧壁边缘与所述“7”字形长柔性链上端相连;
所述底座为矩形结构,四个边角位置向上凸起四个矩形块,矩形块中心位置分别设置一个螺纹通孔,所述四个矩形块和四个螺纹通孔尺寸均完全一致,所述刚性支撑框及其内部柔性结构安装在矩形底座上方,刚性支撑框上的四个通孔和底座上的四个螺纹通孔分别一一对齐,通过四个螺栓刚性连接。
2.根据权利要求1所述的柔性微动操作机构,其特征在于所述的三个“7”字形短柔性链、一个刚性连接块、一个柔性平行四边形结构、一个动平台、一个“7”字形长柔性链和一个刚性支撑框为一体化结构,由整块材料利用线切割整体加工方法加工制成。
说明书
技术领域
本发明涉及机械领域的微/纳米操作系统,具体为一种柔性微动操作机构。该操作机构基于五杆机构,可实现两个面内的平动自由度。
背景技术
微机械技术是微纳米技术的重要分支。应用扫描探针显微镜技术进行分子或原子量级的操作、改型加工处理、制作微型机械零部件乃至微机械整体、生物工程领域中的动植物细胞转基因注射、医疗领域中利用微小的剪刀、微型摄像机、微型传感器等专用微型医疗器械进行微创伤侵入性医疗手术这些情况的实现,都是建立在微操作系统或装置的精密性基础之上的。在微操作领域,要求机构实行较大范围工作空间的运动能力以及精密的定位精度,为了具备足够灵活的运动输出能力,机构中末端执行平台一般需要多个柔性链支撑,单个支链往往造成柔性机构执行末端运动方向上的不准确,影响了机构的精度及运动范围。
德国PI,英国Queensgate等公司均已生产了基于压电陶瓷驱动的微纳米级柔性操作机构的成形产品,主要用于光线系统检测、微加工、微装配等场合。MuneebUllahKhan等,一种用于微操作领域的大行程电磁驱动XY定位平台(MuneebUllahKhan,NabilBencheikh,ChristinePrelle,FrédéricLamarque,TobiasBeutel,StephanusBüttgenbach,AlongstrokeelectromagneticXYpositioningstageformicroapplication,ProceedingsofIEEE/ASMETransactionsonmechatronics,October,2012,17(5):866-874)中报导了一种由四个线性电磁马达直接驱动的洛伦兹力XY定位平台;YongWang等,一种由压电陶瓷驱动器驱动的长行程纳米定位平台(YongWang,FujunSun,JunhuiZhu,MingPang,ChanghaiRu,Long-strokenanopositioningstagedrivenbypiezoelectricmotor,JournalofSensors,2014:1-8)中报道了一种基于压电陶瓷驱动的两轴纳米定位平台;YangmingLi等,一种用于微纳米定位的新型压电驱动的并联解耦及多层柔性结构XY平台(YangmingLi,QingsongXu,AnovelpiezoactuatedXYstagewithparallel,decoupled,andstackedflexurestructureformicro-/nanopositioning.)中介绍了一种两层柔性结构的XY定位平台,每层结构中的柔性支链采用并联方式,具有运动解耦能力,在这一领域,我国的科研工作者们也做出了一定的成绩,如张彦斌等在,无耦合3自由度并联机构的设计和分析(农业机械学报,2008年,39卷8期,208-210)中介绍的一种无耦合二移动一转动3自由度空间并联机构;刘庆玲在柔性对称微位移放大机构性能分析方法的研究(工程设计学报,2013年,20卷4期,344-347)中介绍了一种结构对称的柔性微位移放大机构;李仕华等,新型3-RPC柔性精密平台的刚度与动力学分析(中国机械工程,2013年,24卷17期,2317-2322)中介绍了由3路压电陶瓷驱动器驱动,具有运动解耦能力的空间3自由度柔性操作平台等,上述柔性微动机构由多个或多层柔性支链支撑,但多采用由压电陶瓷驱动器或线性马达直接驱动的方式,中间缺少放大环节,造成末端执行器运动空间范围的极大限制。
发明内容
针对现有技术的不足,本发明拟解决的技术问题是,提供一种柔性微动操作机构,该柔性微动操作机构采用柔性并联结构、单自由度柔性铰链和压电陶瓷驱动器驱动技术,具有一个执行末端,可应用于微/纳操作机械系统,可实现两个面内平动自由度,且具有高精度、低惯量、结构紧凑、无误差积累、无机械摩擦、无间隙,便于加工制造和工业化实施等优点。
本发明解决所述技术问题的技术方案是:设计一种柔性微动操作机构,基于五杆机构,其特征在于该机构包括:两个压电陶瓷驱动器、两个球形接头、三个“7”字形短柔性链、一个刚性连接块、一个柔性平行四边形结构、一个动平台、一个“7”字形长柔性链、一个刚性支撑框和一个底座;
所述刚性支撑框内部按照柔性结构分布要求挖空,除所述底座外,上述各部分结构均设计在所述刚性支撑框空腔的内部,所述刚性支撑框四个边角位置设置四个通孔,刚性支撑框左、右两侧壁上各开有一个通孔,用于放置所述压电陶瓷驱动器,所述球形接头安装在压电陶瓷驱动器的顶端,压电陶瓷驱动器的尾端通过螺纹刚性固定于刚性支撑框的侧壁上,且使球形接头顶在“7”字形短柔性链腰部,构成赫兹接触;
所述“7”字形短柔性链均由两个竖直短梁和其中间的一个“7”字形刚性短梁构成,两个竖直短梁自上而下分布,每个竖直短梁上左右对称开有两组半圆凹槽,每组半圆凹槽为两个,左右对称分布在竖直短梁左右两个侧壁上,三个所述“7”字形短柔性链结构相同,但其中两个设置在所述刚性支撑框内部的左侧,命名为左一短柔性链,左二短柔性链,另外一个设置在所述刚性支撑框内部的右侧,命名为右侧短柔性链,所述左一短柔性链和左二短柔性链相互平行,方向一致,所述右侧短柔性链与所述左二短柔性链关于所述刚性支撑框中部矩形块下边缘中线左右对称分布,所述左一短柔性链和左二短柔性链上部的竖直短梁位于所述“7”字形刚性短梁上方,上端连接于所述刚性连接块的下侧面,下端连接于所述“7”字形刚性短梁的上侧面,下部的竖直短梁位于所述“7”字形刚性短梁下方,上端与所述“7”字形刚性短梁尾部连接,下端连接于所述刚性支撑框空腔内侧壁上,所述右侧短柔性链上部的竖直短梁位于所述“7”字形刚性短梁上方,上端连接于所述“7”字形长柔性链下端,下端连接于所述“7”字形刚性短梁的上侧面,下部的竖直短梁位于所述“7”字形刚性短梁下方,上端与所述“7”字形刚性短梁尾部连接,下端连接于所述刚性支撑框空腔的内侧壁上;
所述刚性连接块为三角形结构,刚性连接块的下部边缘与所述两个左侧“7”字形短柔性链上端相连,刚性连接块的右侧边缘与所述柔性平行四边形结构相连,刚性连接块的左侧边缘闲置;
所述柔性平行四边形结构设置在所述刚性连接块和所述动平台之间,柔性平行四边形结构倾斜放置,与所述刚性支撑框下边缘夹角为45°,柔性平行四边形结构左下端连接于所述刚性连接块右侧边缘,右上端连接于所述动平台线性侧壁上,所述柔性平行四边形结构由相互平行的两个倾斜梁组成,分别命名为左倾斜梁和右倾斜梁,所述两个倾斜梁与所述刚性支撑框下边缘夹角均为45°,所述左倾斜梁的上端左右对称开有两个半圆凹槽,所述左倾斜梁的下端也左右对称开有两个半圆凹槽,所述右倾斜梁与所述左倾斜梁结构一致,所述右倾斜梁的上端左右对称开有两个半圆凹槽,所述右倾斜梁的下端也左右对称开有两个半圆凹槽,所述四组半圆凹槽尺寸一致;
所述“7”字形长柔性链位于所述动平台和所述右侧“7”字形短柔性链之间,“7”字形长柔性链从上而下由一个开有半圆凹槽的竖直短梁和一个“7”字形刚性长梁构成,竖直短梁左右对称开有两个半圆凹槽,位于“7”字形刚性长梁左端,竖直短梁上端与动平台连接,下端连接于“7”字形刚性长梁左端上侧面,“7”字形刚性长梁左端与所述竖直短梁连接,下端尾部与右侧“7”字形短柔性链上端连接;
所述动平台为半圆形结构,动平台轮廓分为线性侧壁和弧形侧壁两部分,弧形侧壁长度为半圆圆周长度,线性侧壁长度相当于圆的直径长度,所述动平台线性侧壁与所述柔性平行四边形结构相连,所述动平台右下部弧形侧壁边缘与所述“7”字形长柔性链上端相连;
所述底座为矩形结构,四个边角位置向上凸起四个矩形块,矩形块中心位置分别设置一个螺纹通孔,所述四个矩形块和四个螺纹通孔尺寸均完全一致,所述刚性支撑框及其内部柔性结构安装在矩形底座上方,刚性支撑框上的四个通孔和底座上的四个螺纹通孔分别一一对齐,通过四个螺栓刚性连接。
与现有技术相比,本发明柔性微动操作机构具有以下优点:
1.基于五杆机构的新型柔性微动操作机构为平面结构形式,可利用线切割一体化加工技术整体加工而成,免装配、无间隙、无摩擦、不需润滑,有利于实现微/纳米级高精度定位。
2.基于五杆机构的新型柔性微动操作机构采用单自由度柔性铰链作为传动机构,具有无机械摩擦、无间隙,可以有效消除并联机构固有的非线性等缺点。
3.原五杆机构由于结构问题一般执行末端主要设置在靠近顶端铰链处,空间有限,而基于五杆机构的新型柔性微动操作机构中通过引入柔性平行四边形结构,改善了机构执行末端的位置空间,同时将原机构执行末端转动自由度转化为平动自由度,实现了两个直线微动。
附图说明
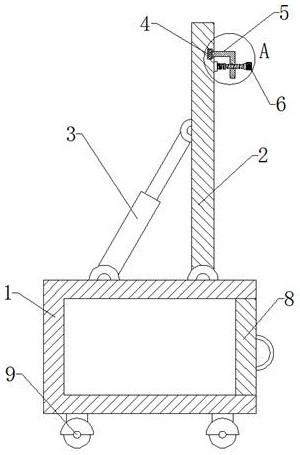
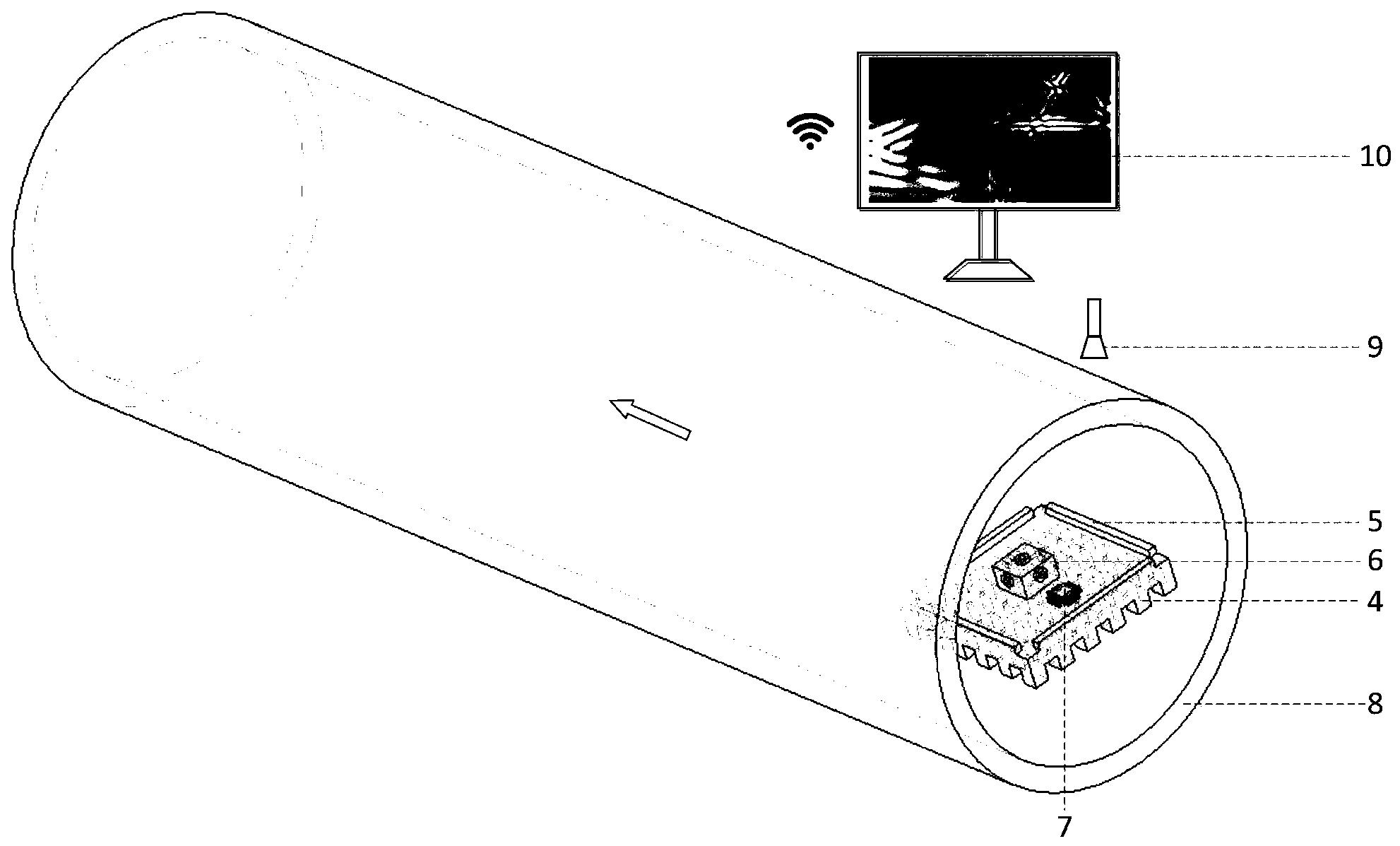
图1是本发明柔性微动操作机构一种实施例的整体结构示意图;
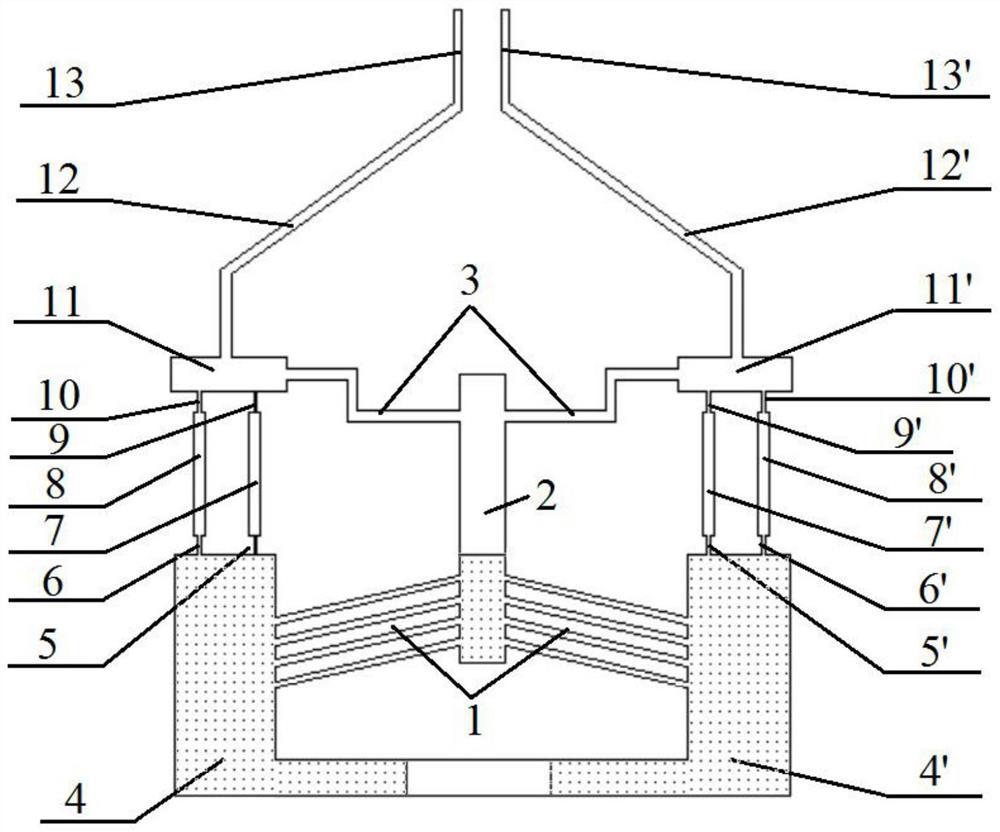
图2是本发明柔性微动操作机构一种实施例的主体结构示意图;
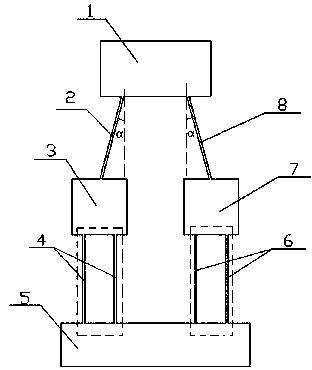
图3是本发明柔性微动操作机构一种实施例的底座结构示意图;
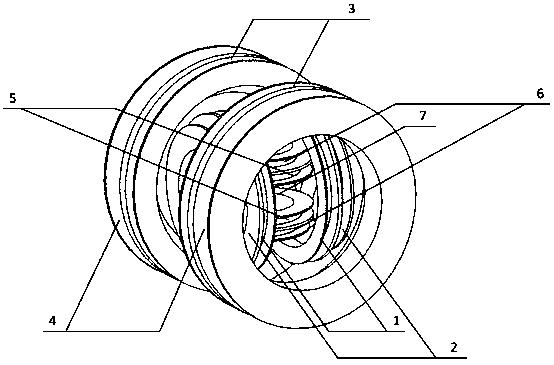
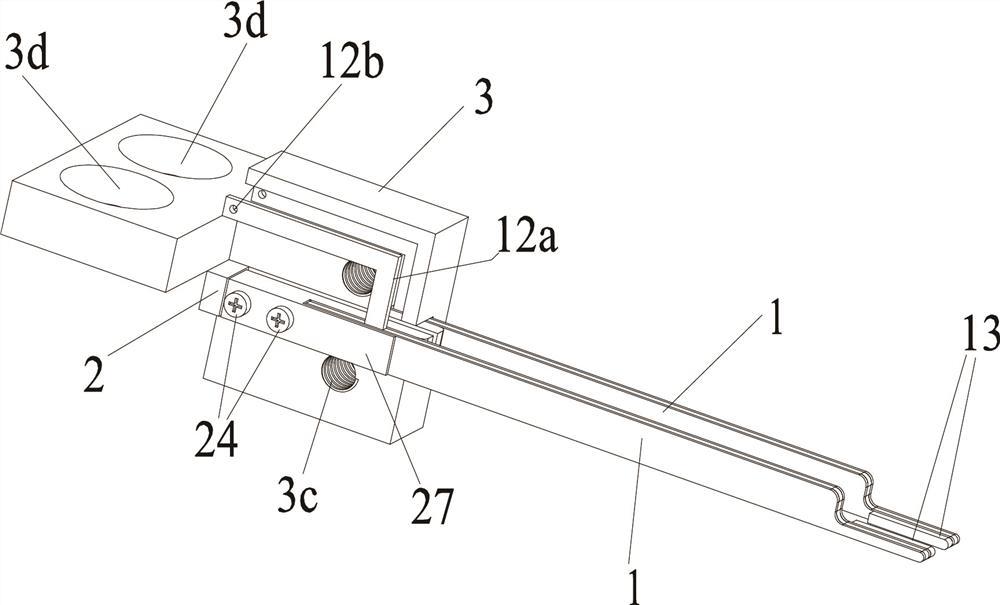
图4是本发明柔性微动操作机构一种实施例的主体结构(图2)横截面一体化结构示意图。
具体实施方式
以下结合较佳实施例及其附图,对本发明进一步详细描述。
针对现有的基于五杆机构的柔性微动操作机构可实现一个面内平动自由度和一个面内转动自由度,并且其执行末端一般位于柔性铰链上,在实际机构设计上较为困难等问题,本发明在操作机构中引入了柔性平行四边形结构及两个刚性连接块,将执行末端的转动自由度转化为平动自由度,并为操作末端开辟了专门的空间,大大提高了机构的性能。
本发明设计的柔性微动操作机构(简称柔性操作机构或机构,参见图1-4)也基于五杆机构,主要包括:两个压电陶瓷驱动器1、两个球形接头2、三个“7”字形短柔性链3、一个刚性连接块4、一个柔性平行四边形结构5、一个动平台6、一个“7”字形长柔性链7、一个刚性支撑框8和一个底座9;
所述刚性支撑框8内部按照柔性结构分布要求挖空,除所述底座9外,上述各部分结构均设计在所述刚性支撑框8空腔的内部,所述刚性支撑框8的四个边角位置设置四个通孔81、82、83、84,所述刚性支撑框8左、右两个侧壁上各开有一个通孔85、86,用于放置所述两个压电陶瓷驱动器1,所述球形接头2安装在压电陶瓷驱动器1的顶端,压电陶瓷驱动器1的尾端通过螺纹刚性固定于所述刚性支撑框8侧壁上,且使所述球形接头2顶在所述“7”字形短柔性链3腰部,构成赫兹接触;
所述三个“7”字形短柔性链3结构相同(参见图2),均由两个开有半圆凹槽的竖直短梁(311、313、321、323、331、333)和其中间的一个“7”字形刚性短梁(312、322、332)构成,两个竖直短梁自上而下分布,每个竖直短梁上均左右对称开有两组半圆凹槽,每组半圆凹槽为两个,左右对称分布在竖直短梁左右两个侧壁上,三个所述“7”字形短柔性链3结构相同,但其中两个设置在所述刚性支撑框8内部的左侧,命名为左一短柔性链31,左二短柔性链32,另外一个位于所述刚性支撑框8内部的右侧,命名为右侧短柔性链33,所述左一短柔性链31和左二短柔性链32相互平行,方向一致,所述右侧短柔性链33与所述左二短柔性链32关于所述刚性支撑框8中部矩形块下边缘中线左右对称分布,所述左一短柔性链31和左二短柔性链32上部的竖直短梁311、321位于所述“7”字形刚性短梁312、322上方,上端连接于所述刚性连接块4的下侧面,下端连接于所述“7”字形刚性短梁312、322的上侧面,下部的竖直短梁313、323位于所述“7”字形刚性短梁312、322下方,上端与所述“7”字形刚性短梁312、322尾部连接,下端连接于所述刚性支撑框8空腔内侧壁上,所述右侧短柔性链33上部的竖直短梁331位于所述“7”字形刚性短梁332上方,上端连接于所述“7”字形长柔性链7下端,下端连接于所述“7”字形刚性短梁332的上侧面,下部的竖直短梁333位于所述“7”字形刚性短梁332下方,上端与所述“7”字形刚性短梁332尾部连接,下端连接于所述刚性支撑框8空腔的内侧壁上;
所述刚性连接块4为三角形结构,刚性连接块4的下部边缘与所述两个左侧“7”字形短柔性链31、32上端相连,刚性连接块4的右侧边缘与所述柔性平行四边形结构5相连,刚性连接块4的左侧边缘闲置;
所述柔性平行四边形结构5位于所述刚性连接块4和所述动平台6之间,所述柔性平行四边形结构5倾斜放置,与所述刚性支撑框8下边缘夹角为45°,所述柔性平行四边形结构5左下端连接于所述刚性连接块4右侧边缘,右上端连接于所述动平台6线性侧壁上,所述柔性平行四边形结构5由相互平行的两个倾斜梁51、52组成,分别命名为左倾斜梁51和右倾斜梁52,所述两个倾斜梁51、52与所述刚性支撑框8下边缘夹角均为45°,所述左倾斜梁51的上端左右对称开有两个半圆凹槽511,所述左倾斜梁51的下端也左右对称开有两个半圆凹槽512,所述右倾斜梁52与所述左倾斜梁51结构一致,所述右倾斜梁52的上端左右对称开有两个半圆凹槽521,所述右倾斜梁52的下端也左右对称开有两个半圆凹槽522,所述四组半圆凹槽(511、512、521、522)尺寸一致;
所述“7”字形长柔性链7位于所述动平台6和所述右侧“7”字形短柔性链33之间,所述“7”字形长柔性链7从上而下由一个开有半圆凹槽的竖直短梁71和一个“7”字形刚性长梁72构成,所述竖直短梁71左右对称开有两个半圆凹槽,竖直短梁71位于“7”字形刚性长梁72左端,竖直短梁71上端与动平台6连接,下端连接于“7”字形刚性长梁72左端上侧面,所述“7”字形刚性长梁72左端与所述竖直短梁71连接,下端尾部与所述右侧“7”字形短柔性链33上端连接;
所述动平台6为半圆形结构,动平台6轮廓分为线性侧壁和弧形侧壁两部分,弧形侧壁长度为半圆圆周长度,线性侧壁长度相当于圆的直径长度,所述动平台6线性侧壁与所述柔性平行四边形结构5相连,动平台6右下部线性侧壁边缘与所述“7”字形长柔性链7上端相连;
所述底座9为矩形结构(参见图3),四个边角位置向上凸起四个矩形块91、92、93、94,在所述四个矩形块91、92、93、94中心位置分别设置一个螺纹通孔911、921、931、941,所述四个矩形块91、92、93、94和四个螺纹通孔911、921、931、941尺寸均完全一致,所述刚性支撑框8及其内部柔性结构安装在所述矩形底座9上方,刚性支撑框8上的四个通孔81、82、83、84和底座9上的四个螺纹通孔911、921、931、941分别一一对齐,通过四个螺栓刚性连接。
本发明柔性操作机构的进一步特征是,除了压电陶瓷驱动器1和球形接头2之外的其他结构,包括所述的三个“7”字形短柔性链3、一个刚性连接块4、一个柔性平行四边形结构5、一个动平台6、一个“7”字形长柔性链7和一个刚性支撑框8为一体化结构,由整块材料利用线切割(WEDM)整体加工方法加工制成(参见图4)。
本发明柔性操作机构的工作原理和过程如下:驱动压电陶瓷驱动器1,使其伸长,推动“7”字形短柔性链3,使其下端与刚性支撑框8相连接的单自由度柔性铰链(半圆凹槽)313、323、333发生柔性弯曲变形,将输出的位移经“7”字形短柔性链3放大后,分别作用于刚性连接块4和“7”字形长柔性链7上,使得刚性连接块4和“7”字形长柔性链7分别产生相应的位置变化,“7”字形长柔性链7在“7”字形短柔性链3的牵引下,使其上的单自由度柔性铰链71随之发生一定程度的弯曲变形,驱使动平台6产生一个转动自由度和一个平动自由度;而刚性连接块4的位置变化引起单自由度柔性铰链311、321的柔性弯曲变形,将运动传递给柔性平行四边形结构5,引起柔性平行四边形结构5上单自由度柔性铰链511、512、521、522的柔性弯曲变形,由于柔性平行四边形结构5的运动特点,其主要输出一个直线平动,因此在柔性平行四边形结构5的制约下,动平台6的回转运动被转化为直线平动,从而使得动平台6具有两个直线平动动作。
本发明柔性操作机构由于增加了柔性平行四边形结构5,通过柔性平行四边形结构5的运动特点制约原五杆机构运动过程中的回转运动,从而实现了执行末端的两个平动自由度。本发明柔性操作机构可作为微纳操作系统的辅助机构,实现快速微量进给和精密定位。
本发明未述及之处适用于现有技术。
需要补充说明的是,本发明描述结构所述的“上、下”、“前、后”、“左、右”等零部件的安装方位词是依据实施例附图所示或习惯而言的,只具有相对性,或者仅是为了叙述方便,不代表该安装位置的唯一性和必须性。
一种柔性微动操作机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0