










专利摘要
本发明公开一种对称解耦单自由度柔性操作机构。其特征在于该柔性操作机构包括按设计要求连接组装的下述零部件:一个压电陶瓷驱动器、一个球形接头、一个驱动端柔性铰链、一个刚性连接块、四组柔性铰链组合、两个柔性链、一个刚性动平台、一个刚性支撑框和一个底座。该机构采用柔性联相结构、单自由度柔性铰链和压电陶瓷驱动器驱动技术,具有一个执行末端,可应用于微/纳操作机械系统,具有高精度、低惯量、结构紧凑、无误差积累、无机械摩擦、无间隙,且便于加工制造和工业化实施等优点。
权利要求
1.一种对称解耦单自由度柔性操作机构,其特征在于该柔性操作机构包括:一个压电陶瓷驱动器、一个球形接头、一个驱动端柔性铰链、一个刚性连接块、四组柔性铰链组合、两个柔性链、一个刚性动平台、一个刚性支撑框和一个底座;
所述刚性支撑框内部挖空,呈倒置的“凸”字形,除所述底座外,上述各部分结构均位于所述倒置“凸”字形空腔内,所述刚性支撑框四个边角位置设置四个螺纹通孔,所述球形接头安装在压电陶瓷驱动器的顶端,压电陶瓷驱动器的尾端通过螺纹刚性固定于所述刚性支撑框倒置“凸”字形下边缘中间的内侧壁上,且使所述球形接头顶在所述驱动端柔性铰链下端面的中间位置上,构成赫兹接触;
所述刚性连接块为正方形结构,刚性连接块下部边缘对称中线位置与所述驱动端柔性铰链的上端相连,所述刚性连接块上部边缘左右对称分别连接所述两个柔性链,所述刚性连接块左侧边缘和右侧边缘分别连接一个所述柔性铰链组合;
所述驱动端柔性铰链由一个竖直梁构成,所述竖直梁上左右对称开有两个半圆凹槽,所述驱动端柔性铰链上端连接于所述刚性连接块的下部边缘,下端与所述压电陶瓷驱动器顶端的球形接头相抵,形成赫兹接触;
所述柔性铰链组合均由两个开有半圆凹槽的水平横梁构成,两个水平横梁自上而下分布,每个水平横梁上均开有两组半圆凹槽,每组半圆凹槽为两个,上下对称分布在水平横梁左右两端的内外两个侧壁上;
所述柔性铰链组合包含四组,根据分布位置分别命名为左上柔性铰链组合,右上柔性铰链组合,左下柔性铰链组合和右下柔性铰链组合,所述左上柔性铰链组合位于所述刚性动平台左侧边缘和所述刚性支撑框倒置“凸”字形左上侧内壁之间,所述右上柔性铰链组合位于所述刚性动平台右侧边缘和所述刚性支撑框倒置“凸”字形右上侧内壁之间,所述左下柔性铰链组合位于所述刚性连接块左侧边缘和所述刚性支撑框倒置“凸”字形左下侧内壁之间,所述右下柔性铰链组合位于所述连接块右侧边缘和所述刚性支撑框倒置“凸”字形右下侧内壁之间;
所述两个柔性链结构完全一致,左右对称分布于所述刚性连接块和所述刚性动平台之间,所述右柔性链由右上梁、右中梁、右下梁和一个水平右横梁组成,所述右上梁和所述右下梁均竖直放置,所述右上梁从上到下包括上竖直梁,竖直短梁和下竖直梁三部分,所述上竖直梁左右对称开有两个半圆凹槽,所述下竖直梁左右对称开有两个半圆凹槽,所述两组半圆凹槽尺寸一致,所述右上梁中的上竖直梁的上端连接于所述刚性动平台的下部边缘右侧,所述右上梁中的下竖直梁的下端连接于所述水平右横梁的右端上侧面,所述右下梁和所述右上梁结构和尺寸完全一致,所述右下梁中的上竖直梁的上端连接于所述水平右横梁的左端下侧面,所述右下梁中的下竖直梁的下端与所述刚性连接块上部边缘右端相连,所述右中梁也竖直放置,所述右中梁上左右对称开有两个半圆凹槽,所述右中梁上端连接于所述水平右横梁中线位置下侧面,下端连接于所述刚性支撑框倒置“凸”字形右侧上内壁;
所述左柔性链和右柔性链结构一致,左右对称分布于所述刚性连接块上侧边缘中线两侧,所述左柔性链由左上梁、左中梁、左下梁和一个水平左横梁组成,所述左上梁和所述左下梁均竖直放置,所述左上梁从上到下包括上竖直梁,竖直短梁和下竖直梁三部分,所述上竖直梁左右对称开有两个半圆凹槽,所述下竖直梁左右对称开有两个半圆凹槽,所述两组半圆凹槽尺寸一致,所述左上梁中的上竖直梁的上端连接于所述刚性动平台的下部边缘左侧,所述左上梁中的下竖直梁的下端连接于所述水平左横梁的左端上侧面,所述左下梁和所述左上梁结构和尺寸完全一致,所述左下梁中的上竖直梁的上端连接于所述水平左横梁的右端下侧面,所述左下梁中的下竖直梁的下端与所述刚性连接块的上部边缘左端相连,所述左中梁也竖直放置,所述左中梁上左右对称开有两个半圆凹槽,所述左中梁上端连接于所述水平左横梁中线位置下侧面,下端连接于所述刚性支撑框倒置“凸”字形左侧上内壁;
所述刚性动平台为长方形结构,所述刚性动平台下部边缘左端与左柔性链的上端连接,所述刚性动平台下部边缘右端与右柔性链的上端连接,所述刚性动平台左侧面与所述左上柔性铰链组合相连,所述刚性动平台右侧面与所述右上柔性铰链组合相连;
所述底座为矩形结构,四个边角位置向上凸起四个矩形块,在所述四个矩形块中心位置分别设置一个螺纹通孔,所述四个矩形块和四个螺纹通孔尺寸均完全一致,并且所述底座上四个螺纹通孔尺寸和所述刚性支撑框上四个螺纹通孔尺寸完全一致,所述刚性支撑框及其内部柔性结构安装在所述矩形底座上方,所述刚性支撑框上的四个螺纹通孔和所述底座上的四个螺纹通孔分别一一对齐,通过四个螺栓刚性连接。
2.根据权利要求1所述的对称解耦单自由度柔性操作机构,其特征在于所述的驱动端柔性铰链、刚性连接块、两个柔性链、四个柔性铰链组合、刚性动平台和刚性支撑框为由整块材料利用线切割整体加工方法加工制成的一体化结构。
说明书
技术领域
本发明涉及机械领域的微/纳米操作系统,具体为一种对称解耦单自由度柔性操作机构。该机构可实现一个面内平动自由度的柔性微动操作。
背景技术
微机械技术是微纳米技术的重要分支。应用扫描探针显微镜技术进行分子或原子量级的操作、改型加工处理、制作微型机械零部件乃至微机械整体、生物工程领域中的动植物细胞转基因注射、医疗领域中利用微小的剪刀、微型摄像机、微型传感器等专用微型医疗器械进行微创伤侵入性医疗手术这些情况的实现,都是建立在微操作系统或装置的精密性基础之上的。在微操作领域,要求机构实行较大范围工作空间的运动能力以及精密的定位精度,现有柔性机构中多采用由绕固定转动轴运动的单自由度柔性铰链按不同串并联方式构成的柔性链传动,单个支链往往造成度柔性机构执行末端运动方向上不准确,影响了机构的精度及运动范围。
德国PI,英国Queensgate等公司均已生产了基于压电陶瓷驱动的微纳米级柔性操作机构的成形产品,主要用于光线系统检测、微加工、微装配等场合。MuneebUllahKhan等,一种用于微操作领域的大行程电磁驱动XY定位平台(MuneebUllahKhan,NabilBencheikh,ChristinePrelle,FrédéricLamarque,TobiasBeutel,StephanusBüttgenbach,AlongstrokeelectromagneticXYposi-tioningstageformicroapplication,ProceedingsofIEEE/ASMETransactionsonmechatronics,October,2012,17(5):866-874)中报导了一种由四个线性电磁马达直接驱动的洛伦兹力XY定位平台;YongWang等,一种由压电陶瓷驱动器驱动的长行程纳米定位平台(YongWang,FujunSun,JunhuiZhu,MingPang,ChanghaiRu,Long-strokenanopositioningstagedrivenbypiezoelectricmotor,JournalofSensors,2014:1-8)中报道了一种基于压电陶瓷驱动的两轴纳米定位平台。YangmingLi等,一种用于微纳米定位的新型压电驱动的并联解耦及多层柔性结构XY平台(YangmingLi,QingsongXu,AnovelpiezoactuatedXYstagewithparallel,decoupled,andstackedflexurestructureformi-cro-/nanopositioning.)中介绍了一种两层柔性结构的XY定位平台,其每层结构中的柔性支链采用并联方式,具有运动解耦能力。在这一领域,我国的科研工作者们也做出了一定的成绩,如张彦斌等在《无耦合3自由度并联机构的设计和分析》(农业机械学报,2008年,39卷8期,208-210)中介绍的一种无耦合二移动一转动3自由度空间并联机构;刘庆玲在《柔性对称微位移放大机构性能分析方法的研究》(工程设计学报,2013年,20卷4期,344-347)中介绍了一种结构对称的柔性微位移放大机构;李仕华等《新型3-RPC柔性精密平台的刚度与动力学分析》(中国机械工程,2013年,24卷17期,2317-2322)中介绍了由3路压电陶瓷驱动器驱动,具有运动解耦能力的空间3自由度柔性操作平台。上述柔性操作机构由多个或多层柔性支链支撑,但多采用由压电陶瓷驱动器或线性马达直接驱动的方式,中间没有放大环节,造成末端执行器运动空间范围的极大限制。
发明内容
针对现有技术的不足,特别是现有柔性机构中运动耦合及无法实现更大工作空间要求的不足,本发明拟解决的技术问题是,提供一种对称解耦单自由度柔性操作机构。该机构采用柔性联相结构、单自由度柔性铰链和压电陶瓷驱动器驱动技术,具有一个执行末端,可应用于微/纳操作机械系统,具有高精度、低惯量、结构紧凑、无误差积累、无机械摩擦、无间隙,且便于加工制造和工业化实施等优点。
本发明解决所述技术问题的技术方案是:设计一种对称解耦单自由度柔性操作机构,其特征在于该机构包括:一个压电陶瓷驱动器、一个球形接头、一个驱动端柔性铰链、一个刚性连接块、四组柔性铰链组合、两个柔性链、一个刚性动平台、一个刚性支撑框和一个底座;
所述刚性支撑框内部挖空,呈倒置的“凸”字形,除所述底座外,上述各部分结构均位于所述倒置“凸”字形空腔内,所述刚性支撑框四个边角位置设置四个螺纹通孔,所述球形接头安装在压电陶瓷驱动器的顶端,压电陶瓷驱动器的尾端通过螺纹刚性固定于所述刚性支撑框倒置“凸”字形下边缘中间的内侧壁上,且使所述球形接头顶在所述驱动端柔性铰链下端面的中间位置上,构成赫兹接触;
所述刚性连接块为正方形结构,刚性连接块下部边缘对称中线位置与所述驱动端柔性铰链的上端相连,所述刚性连接块上部边缘左右对称分别连接所述两个柔性链,所述刚性连接块左侧边缘和右侧边缘分别连接一个所述柔性铰链组合;
所述驱动端柔性铰链由一个竖直梁构成,所述竖直梁上左右对称开有两个半圆凹槽,所述驱动端柔性铰链上端连接于所述刚性连接块的下部边缘,下端与所述压电陶瓷驱动器顶端的球形接头相抵,形成赫兹接触;
所述柔性铰链组合均由两个开有半圆凹槽的水平横梁构成,两个水平横梁自上而下分布,每个水平横梁上均开有两组半圆凹槽,每组半圆凹槽为两个,上下对称分布在水平横梁左右两端的内外两个侧壁上;
所述柔性铰链组合包含四组,根据分布位置分别命名为左上柔性铰链组合,右上柔性铰链组合,左下柔性铰链组合和右下柔性铰链组合,所述左上柔性铰链组合位于所述刚性动平台左侧边缘和所述刚性支撑框倒置“凸”字形左上侧内壁之间,所述右上柔性铰链组合位于所述刚性动平台右侧边缘和所述刚性支撑框倒置“凸”字形右上侧内壁之间,所述左下柔性铰链组合位于所述刚性连接块左侧边缘和所述刚性支撑框倒置“凸”字形左下侧内壁之间,所述右下柔性铰链组合位于所述连接块右侧边缘和所述刚性支撑框倒置“凸”字形右下侧内壁之间;
所述两个柔性链结构完全一致,左右对称分布于所述刚性连接块和所述刚性动平台之间,所述右柔性链由右上梁、右中梁、右下梁和一个水平右横梁组成,所述右上梁和所述右下梁均竖直放置,所述右上梁从上到下包括上竖直梁,竖直短梁和下竖直梁三部分,所述上竖直梁左右对称开有两个半圆凹槽,所述下竖直梁左右对称开有两个半圆凹槽,所述两组半圆凹槽尺寸一致,所述右上梁中的上竖直梁的上端连接于所述刚性动平台的下部边缘右侧,所述右上梁中的下竖直梁的下端连接于所述水平右横梁的右端上侧面,所述右下梁和所述右上梁结构和尺寸完全一致,所述右下梁中的上竖直梁的上端连接于所述水平右横梁的左端下侧面,所述右下梁中的下竖直梁的下端与所述刚性连接块上部边缘右端相连,所述右中梁也竖直放置,所述右中梁上左右对称开有两个半圆凹槽,所述右中梁上端连接于所述水平右横梁中线位置下侧面,下端连接于所述刚性支撑框倒置“凸”字形右侧上内壁;
所述左柔性链和右柔性链结构一致,左右对称分布于所述刚性连接块上侧边缘中线两侧,所述左柔性链由左上梁、左中梁、左下梁和一个水平左横梁组成,所述左上梁和所述左下梁均竖直放置;所述左上梁从上到下包括上竖直梁,竖直短梁和下竖直梁三部分,所述上竖直梁左右对称开有两个半圆凹槽,所述下竖直梁左右对称开有两个半圆凹槽,所述两组半圆凹槽尺寸一致,所述左上梁中的上竖直梁的上端连接于所述刚性动平台的下部边缘左侧,所述左上梁中的下竖直梁的下端连接于所述水平左横梁的左端上侧面,所述左下梁和所述左上梁结构和尺寸完全一致,所述左下梁中的上竖直梁的上端连接于所述水平左横梁的右端下侧面,所述左下梁中的下竖直梁的下端与所述刚性连接块的上部边缘左端相连,所述左中梁也竖直放置,所述左中梁上左右对称开有两个半圆凹槽,所述左中梁上端连接于所述水平左横梁中线位置下侧面,下端连接于所述刚性支撑框倒置“凸”字形左侧上内壁;
所述刚性动平台为长方形结构,所述刚性动平台下部边缘左端与左柔性链的上端连接,所述刚性动平台下部边缘右端与右柔性链的上端连接,所述刚性动平台左侧面与所述左上柔性铰链组合相连,所述刚性动平台右侧面与所述右上柔性铰链组合相连;
所述底座为矩形结构,四个边角位置向上凸起四个矩形块,在所述四个矩形块中心位置分别设置一个螺纹通孔,所述四个矩形块和四个螺纹通孔尺寸均完全一致,并且所述底座上四个螺纹通孔尺寸和所述刚性支撑框上四个螺纹通孔尺寸完全一致,所述刚性支撑框及其内部柔性结构安装在所述矩形底座上方,所述刚性支撑框上的四个螺纹通孔和所述底座上的四个螺纹通孔分别一一对齐,通过四个螺栓刚性连接。
与现有技术相比,本发明柔性微动操作机构具有如下优点:
1.单自由度柔性微动操作机构为平面结构,可利用线切割一体化加工技术整体加工而成,免于装配、无间隙、无摩擦、不需润滑,有利于实现微/纳米级高精度定位。
2.单自由度柔性微动操作机构采用对称结构,具有高刚度、高精度、低惯量、结构紧凑、无误差积累等优点,并能够实现运动输出的解耦能力。
3.单自由度柔性微动操作机构采用单自由度柔性铰链作为传动机构,具有无机械摩擦、无间隙,可以有效消除并联机构固有的非线性等缺点。
附图说明
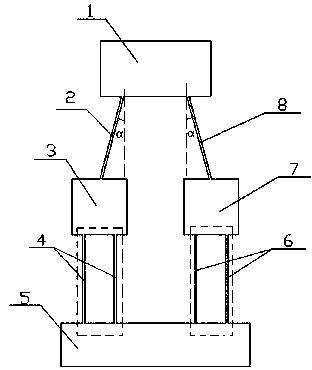
图1是本发明对称解耦单自由度柔性操作机构一种实施例的整体结构示意图;
图2是本发明对称解耦单自由度柔性操作机构一种实施例的主体结构和柔性铰链组合示意图;
图3是本发明对称解耦单自由度柔性操作机构一种实施例的主体结构和柔性链结构示意图;
图4是本发明对称解耦单自由度柔性操作机构一种实施例的底座结构示意图;
图5是本发明对称解耦单自由度柔性操作机构一种实施例的主体结构和柔性铰链组合(图2)横截面一体化结构示意图。
图6是本发明对称解耦单自由度柔性操作机构一种实施例的主体结构和柔性链(图3)横截面一体化结构示意图。
具体实施方式
以下结合较佳实施例及其附图,对本发明进一步详细描述如下:但它并不限制本申请权利要求的保护范围。
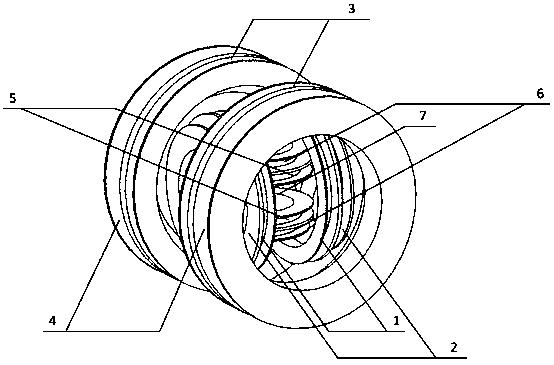
本发明设计的对称解耦单自由度柔性操作机构(简称柔性操作机构,参见图1-6)是一种可实现一个面内平动自由度的柔性微动操作机构,主要包括:一个压电陶瓷驱动器1、一个球形接头2、一个驱动端柔性铰链3、一个刚性连接块4、四组柔性铰链组合5、两个柔性链6、一个刚性动平台7、一个刚性支撑框8和一个底座9;
所述刚性支撑框8内部挖空呈倒置“凸”字形或空心“T”字形(参见图1-3/5-6),除所述底座9外,上述各部分结构(数字标记1-7)均位于所述刚性支撑框8倒置“凸”字形的空腔内或空心“T”字形的空心内,所述刚性支撑框8四个边角位置设置四个螺纹通孔(记为81、82、83、84),所述球形接头2安装在所述压电陶瓷驱动器1的顶端,所述压电陶瓷驱动器1的尾端通过螺纹刚性固定于所述刚性支撑框8倒置“凸”字形下边缘中间的内侧壁上,且使所述球形接头2顶在所述驱动端柔性铰链3下端面的中间位置上,构成赫兹接触;
所述刚性连接块4为正方形结构,所述刚性连接块4下部边缘对称中线位置与所述驱动端柔性铰链3的上端相连,上部边缘左右对称分别连接所述两个柔性链61、62,所述刚性连接块4右侧边缘和左侧边缘分别连接一个所述柔性铰链组合51、52;
所述驱动端柔性铰链3由一个竖直梁构成,所述竖直梁上左右对称开有两个半圆凹槽,所述驱动端柔性铰链3下端与所述压电陶瓷驱动器1顶端的球形接头2相抵,形成赫兹接触,上端连接于所述刚性连接块4的下部边缘中点位置;
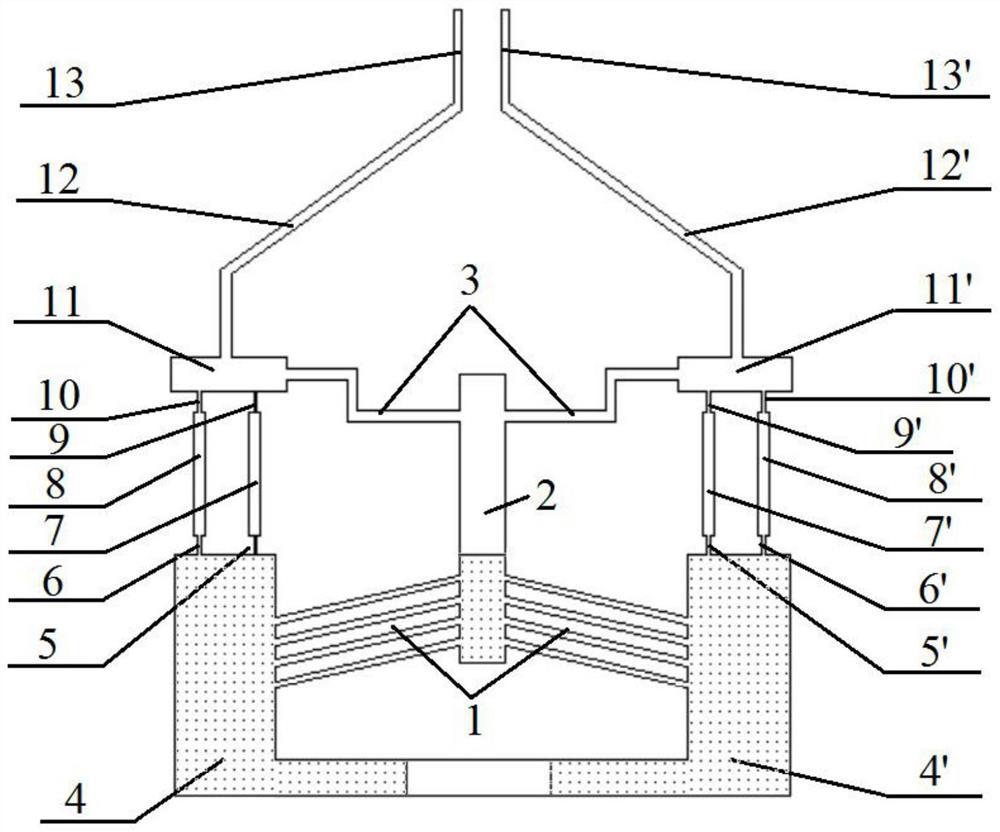
所述柔性铰链组合51、52、53、54(参见图2)均由两个开有半圆凹槽的水平横梁构成,两个水平横梁自上而下分布,每个水平横梁上均开有两组半圆凹槽,每组半圆凹槽为两个,上下对称分布在水平横梁左右两端的内外两个侧壁上,具体说,所述柔性铰链组合51位于所述刚性连接块4的右侧边缘和所述刚性支撑框8倒置“凸”字形空腔右下侧内壁之间,分布在所述柔性铰链组合51上横梁的两对半圆凹槽从左向右标记为513、514,分布在所述柔性铰链组合51下横梁的两对半圆凹槽从左向右标记为512、511,所述柔性铰链组合52位于所述刚性连接块4的左侧边缘和所述刚性支撑框8倒置“凸”字形空腔左下侧内壁之间,分布在所述柔性铰链组合52上横梁的两对半圆凹槽从左向右标记为523、524,分布在所述柔性铰链组合52下横梁的两对半圆凹槽从左向右标记为522、521,所述柔性铰链组合53位于所述刚性动平台7的左侧边缘和所述刚性支撑框8倒置“凸”字形空腔左上侧内壁之间,分布在所述柔性铰链组合53上横梁的两对半圆凹槽从左向右标记为533、534,分布在所述柔性铰链组合53下横梁的两对半圆凹槽从左向右标记为532、531,所述柔性铰链组合54位于所述刚性动平台7的右侧边缘和所述刚性支撑框8倒置“凸”字形空腔右上侧内壁之间,分布在所述柔性铰链组合54上横梁的两对半圆凹槽从左向右标记为543、544,分布在所述柔性铰链组合54下横梁的两对半圆凹槽从左向右标记为542、541;
整个机构中共包含四组所述柔性铰链组合,根据分布位置分别命名为左上柔性铰链组合53,右上柔性铰链组合54,左下柔性铰链组合52,右下柔性铰链组合51,所述左上柔性铰链组合53位于所述刚性动平台7左侧边缘和所述刚性支撑框8倒置“凸”字形左上侧内壁之间,所述右上柔性铰链组合54位于所述刚性动平台7右侧边缘和所述刚性支撑框8倒置“凸”字形右上侧内壁之间,所述左下柔性铰链组合52位于所述刚性连接块4左侧边缘和所述刚性支撑框8倒置“凸”字形左下侧内壁之间,所述右下柔性铰链组合51位于所述连接块4右侧边缘和所述刚性支撑框8倒置“凸”字形右下侧内壁之间;
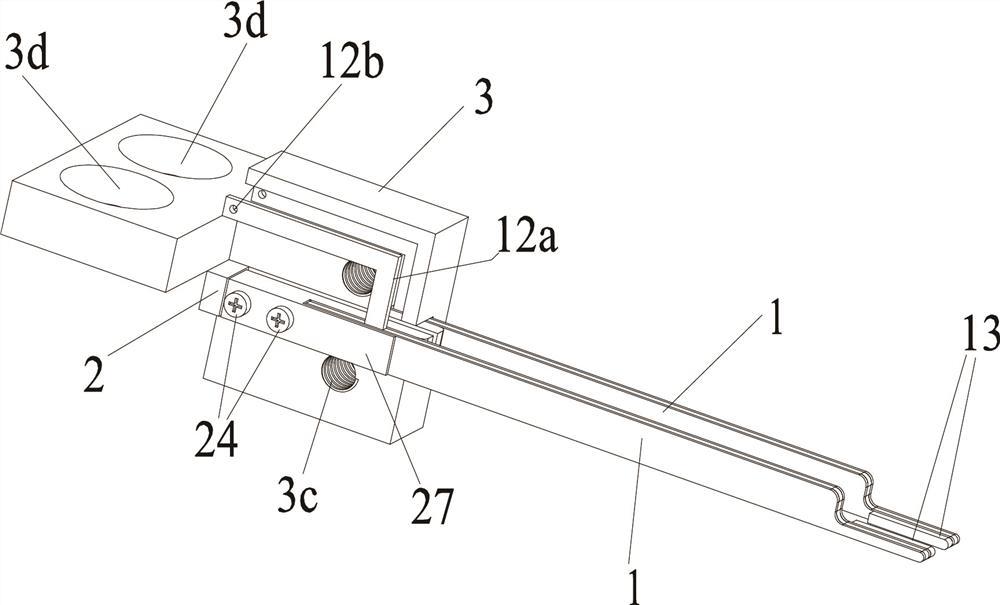
所述两个柔性链61、62结构完全一致(参见图3),左右对称分布于所述刚性连接块4和所述刚性动平台7之间,所述右柔性链62由右上梁、右中梁624、右下梁和一个水平右横梁625组成,所述右上梁和所述右下梁均竖直放置,所述右上梁从上到下包括上竖直梁621,竖直短梁622和下竖直梁623三部分,所述上竖直梁621左右对称开有两个半圆凹槽,所述下竖直梁623左右对称开有两个半圆凹槽,所述两组半圆凹槽尺寸一致,所述右上梁中的上竖直梁621的上端连接于所述刚性动平台7的下部边缘右侧,所述右上梁中的下竖直梁623的下端连接于所述水平右横梁625的右端上侧面,所述右下梁和所述右上梁结构和尺寸完全一致,所述右下梁中的上竖直梁626的上端连接于所述水平右横梁625的左端下侧面,所述右下梁中的下竖直梁628的下端与所述刚性连接块4上部边缘右端相连,所述右中梁624也竖直放置,所述右中梁624上左右对称开有两个半圆凹槽,所述右中梁624上端连接于所述水平右横梁625中线位置下侧面,下端连接于所述刚性支撑框8倒置“凸”字形右侧上内壁;
所述左柔性链61和所述右柔性链62左右对称分布于所述刚性连接块4上侧边缘中线两侧,所述左柔性链61和所述右柔性链62结构一致,所述左柔性链61由左上梁、左中梁614、左下梁和一个水平左横梁615组成,所述左上梁和所述左下梁均竖直放置,所述左上梁从上到下包括上竖直梁611,竖直短梁612和下竖直梁613三部分,所述上竖直梁611左右对称开有两个半圆凹槽,所述下竖直梁613左右对称开有两个半圆凹槽,所述两组半圆凹槽尺寸一致,所述左上梁中的上竖直梁611的上端连接于所述刚性动平台7的下部边缘左侧,所述左上梁中的下竖直梁613的下端连接于所述水平左横梁615的左端上侧面,所述左下梁和所述左上梁结构和尺寸完全一致,所述左下梁中的上竖直梁616的上端连接于所述水平左横梁615的右端下侧面,所述左下梁中的下竖直梁618的下端与所述刚性连接块4的上部边缘左端相连,所述左中梁614也竖直放置,所述左中梁614上左右对称开有两个半圆凹槽,所述左中梁614上端连接于所述水平左横梁615中线位置下侧面,下端连接于所述刚性支撑框8倒置“凸”字形左侧上内壁;
所述刚性动平台7为长方形结构(参见图2、图3),所述刚性动平台7下部边缘左端与左柔性链61的上端连接,所述刚性动平台7下部边缘右端与右柔性链62的上端连接,所述刚性动平台7左侧面与所述左上柔性铰链组合53相连,所述刚性动平台7右侧面与所述右上柔性铰链组合54相连;
所述底座9为矩形结构(参见图4),其四个边角位置向上凸起四个矩形块91、92、93和94,在所述四个矩形块91、92、93、94的中心位置分别设置一个螺纹通孔911、921、931、941,所述四个矩形块91、92、93、94和四个螺纹通孔911、921、931和941尺寸分别完全一致,并且所述底座9上四个螺纹通孔尺寸911、921、931、941和所述刚性支撑框8上四个螺纹通孔81、82、83、84尺寸也完全一致,所述刚性支撑框8及其内部柔性结构(1-7)安装在所述矩形底座9上方,所述刚性支撑框8上的四个螺纹通孔81、82、83、84和所述底座9上的四个螺纹通孔911、921、931、941分别一一对齐,通过四个螺栓刚性连接。
本发明柔性操作机构的进一步特征是,除了压电陶瓷驱动器1和球形接头2之外的其他结构,包括所述的驱动端柔性铰链3、刚性连接块4、两个柔性链6、四个柔性铰链组合5、刚性动平台7和刚性支撑框8为一体化结构,由整块材料利用线切割(WEDM)整体加工方法加工制成(参见图5、图6)。
本发明柔性操作机构所述的零部件本身均为公知技术,皆可商购获得。
本发明柔性操作机构的工作原理和过程如下:驱动压电陶瓷驱动器1,使其伸长,推动驱动端柔性铰链3以及刚性连接块4,,连接在刚性连接块4左右两侧的柔性铰链组合51、52中的单自由度柔性铰链(半圆凹槽)511、512、513、514和521、522、523、524产生相应的弯曲弹性变形,使刚性连接块4产生竖直方向移动,在刚性连接块4的推动下,连接于其上部的两个柔性链61、62也随之向上移动,分布于柔性链61、62上的单自由度柔性铰链611、613、614、616、618和621、623、624、626、628发生弯曲弹性变形,同时由于左右水平横梁614、624的杠杆作用,将位移量放大两倍,从而将刚性动平台7向下拖动,使其产生竖直方向的单自由度平动,在刚性动平台7向下移动过程中,连接于其左右两侧的柔性铰链组合53、54中的单自由度柔性铰链531、532、533、534和541、542、543、544也产生弯曲弹性变形,在柔性铰链组合53、54的作用下,如果两个柔性链61、62牵引力存在差异,由此可能引起的刚性动平台7的旋转动作就可以得到有效的避免,从而保证刚性动平台7的直线平动动作。
本发明柔性操作机构增加了柔性杠杆放大环节,可以有效的提高刚性动平台的实际输出,增大工作空间范围;另外本发明柔性操作机构采用左右对称结构形式,可以对机构运动过程中衍生出的其他运动进行有效解耦,可作为微纳操作系统的辅助机构,实现快速微量进给和精密定位。
本发明未述及之处适用于现有技术。
需要补充说明的是,本发明描述结构所述的“上、下”、“前、后”、“左、右”等零部件的安装方位词是依据实施例附图所示或习惯而言的,只具有相对性,或者仅是为了叙述方便,不代表该安装位置的唯一性和必须性。
一种对称解耦单自由度柔性操作机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0