











专利摘要
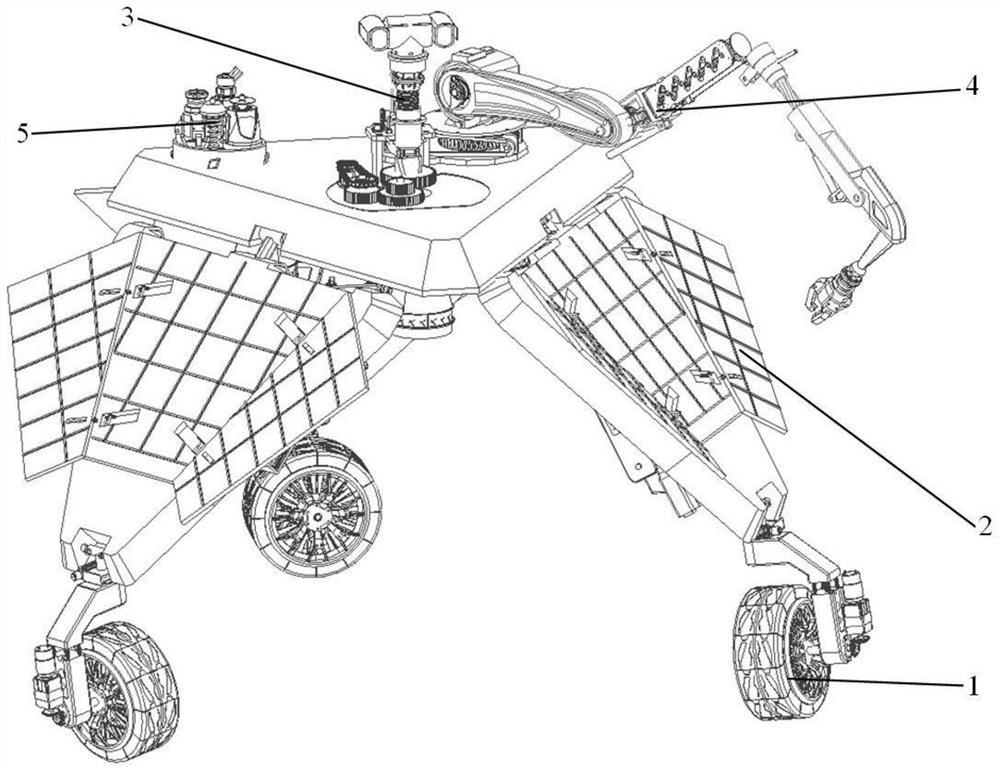
本实用新型公开了一种煤矿用搜救机器人,包括机械臂组件、履带组件;机械臂组件包括两根机械大臂、一根机械爪、底座,机械大臂一端外部设有伺服电机与底座铰接,伺服电机输出轴穿过机械大臂与底座相连接;机械爪一端连接伺服电机,通过铰接与第二根大臂相连,另一端设有夹紧机构,局部探测器设置在机械爪上;履带组件包括承重轮组件、驱动轮组件、张紧轮组件、防火履带,承重轮与承重轮保持架、保持架与承重主体均利用螺栓相连,压杆的一端通过压轮压紧承重轮保持架,另一端连接复位弹簧,承重主体上部通过螺栓连接有导轮组件。在移动时可以通过机械臂清障或协助翻越障碍物,使得整机有良好的通过性,提高救援效率。
权利要求
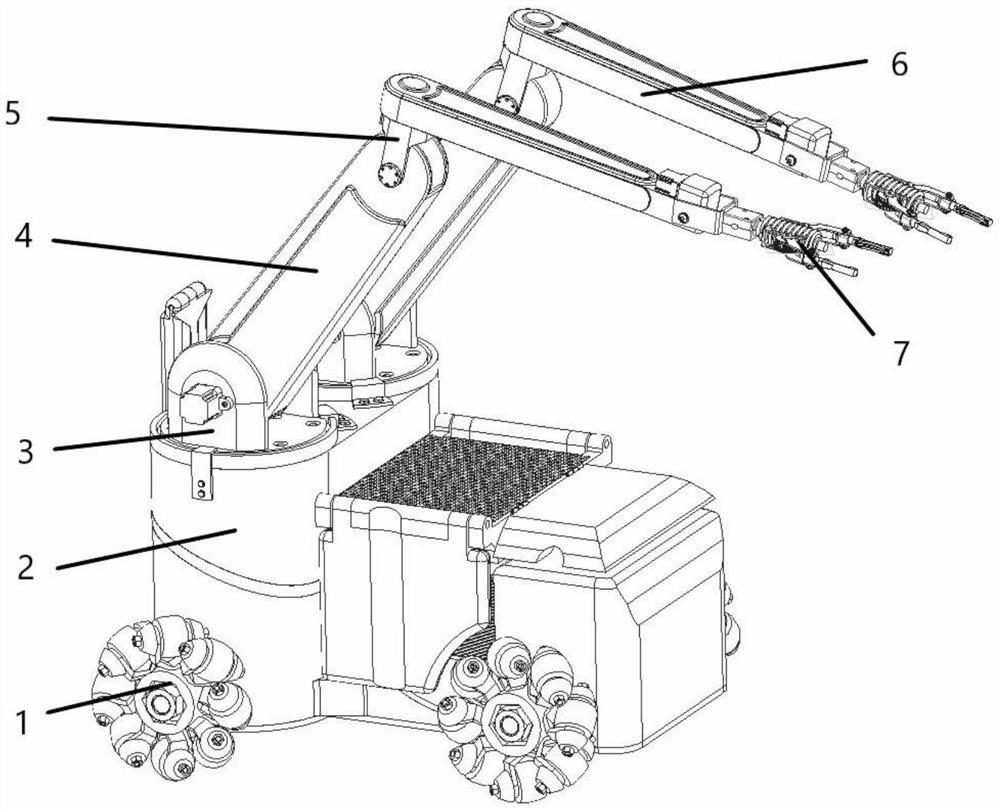
1.一种煤矿用搜救机器人,其特征在于:包括履带机构、机械臂机构、底盘机构、冷却机构、上盖机构、外挂吊舱机构,所述的履带机构位于机体底部,机械臂机构位于整机前上方;
所述履带机构包括与箱体连接的外挡板,所述外挡板设有外挂螺栓用于与外挂吊舱连接;
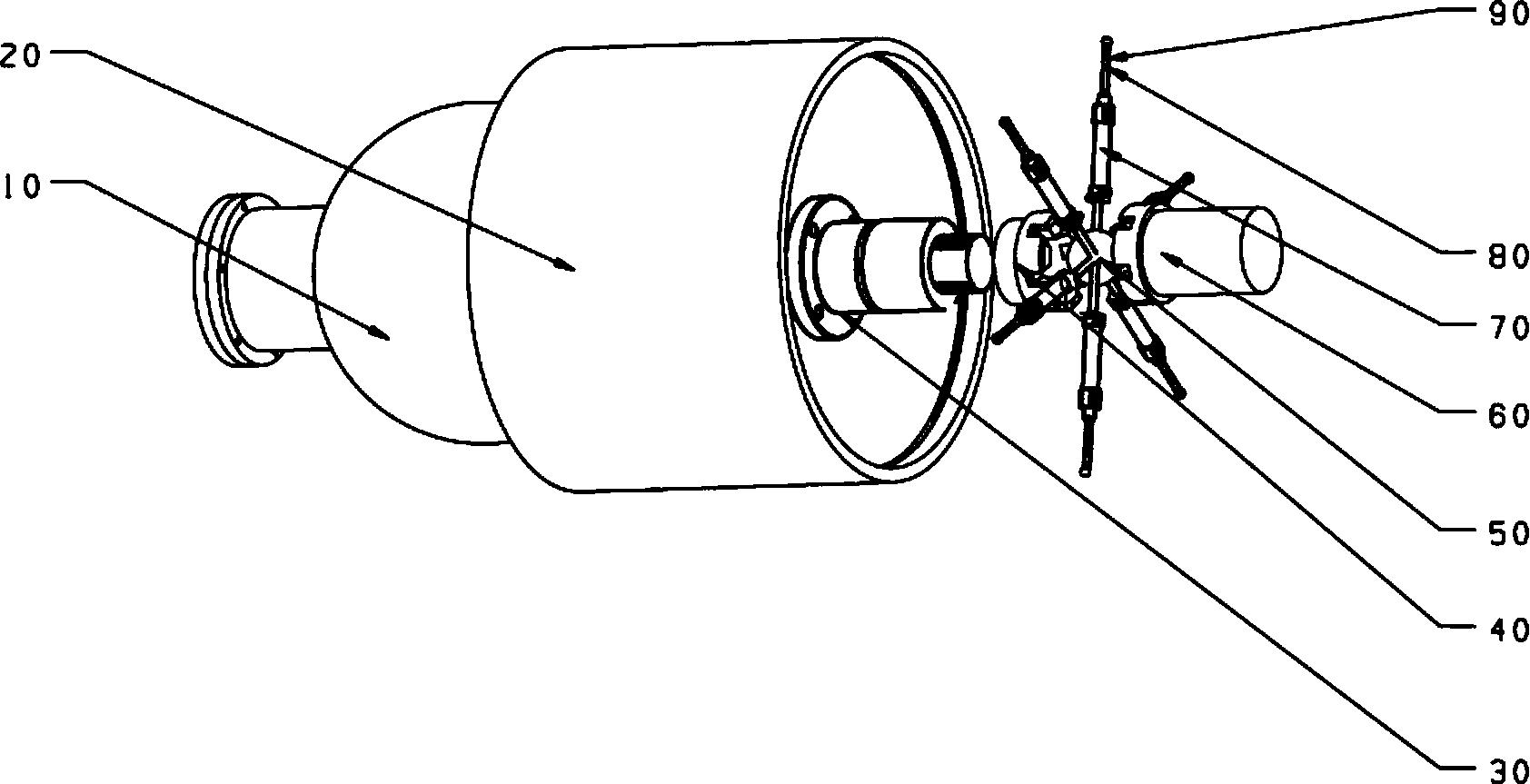
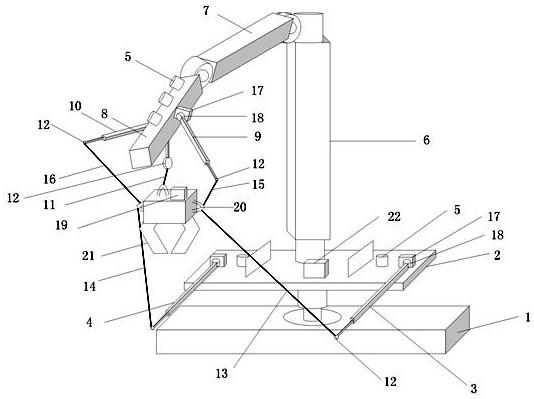
所述机械臂机构包括,机械爪、机械大臂、Y轴抬升步进电机、锁紧装置、底座、Z轴扭转步进电机、辅助支撑组成;
所述外挡板内侧设有履带,所述履带内部设有驱动轮、承重轮、张紧轮,所述驱动轮和承重主体均两侧与外挡板利用螺栓连接,所述外挡板通过螺栓与箱体连接;
所述驱动轮设有保持架与外挡板连接,所述驱动轮设有独立的驱动电机;
所述承重主体与承重轮保持架连接,所述保持架与承重轮连接;
所述张紧轮固定在张紧轮保持架,所述张紧轮保持架与张紧机构通过滑槽连接,所述张紧机构与箱体连接,所述张紧机构内置有丝杠,所述丝杠通过张紧电机驱动。
2.根据权利要求1所述的一种煤矿用搜救机器人,其特征在于,所述承重轮均布排列,所述承重轮悬空及压缩俯仰角度为-8~30°。
3.根据权利要求1所述的一种煤矿用搜救机器人,其特征在于,机械臂通过连接法兰连接在上部盖板上;底部电机与底座之间设有辅助支撑,所述辅助支撑为均布设置。
4.根据权利要求1所述的一种煤矿用搜救机器人,其特征在于,所述机械爪与机械大臂、机械大臂与底座均为铰接,所述机械臂抬升电机传动轴设有固定结构,所述固定结构内设有压紧盖板,所述压紧盖板上下设有推力轴承,所述固定结构外部设有锁紧螺母和止推垫片。
5.根据权利要求1所述的一种煤矿用搜救机器人,其特征在于,所述机械臂机构其固定结构、抬升电机、机械爪均为活性连接可拆卸更换。
6.根据权利要求1所述的一种煤矿用搜救机器人,其特征在于,所述机械爪设有夹紧电机和夹紧丝杠,所述机械爪保持架内部设有滑槽,所述机械爪保持架内部设有可移动的夹紧螺母,所述夹紧螺母与楔形块通过螺栓连接,所述机械爪内置有滑槽,所述滑槽内部设有楔形块,两根独立的机械指通过铰接与机械掌相连,所述机械指一端设有减磨轴承,所述机械指一端设有防滑花纹。
7.根据权利要求1所述的一种煤矿用搜救机器人,其特征在于,外挂吊舱与箱体为活性连接,其雷达吊舱、维生附加吊舱、货运附加吊舱、浮筒外加吊舱四种外挂部件,均可拆卸更换。
8.根据权利要求1所述的一种煤矿用搜救机器人,其特征在于,整机的前部和下部均有附加装甲以及缓冲层,所述整机正前方设有散热格栅。
9.根据权利要求1所述的一种煤矿用搜救机器人,其特征在于,所述上盖机构上部设有防滚架,所述防滚架与上层盖板通过螺栓连接,所述防滚架内部设有主探测器,所述防滚架前部倾斜装甲内设有顶部探测雷达。
一种煤矿用搜救机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0