









专利摘要
一种仿生海底生物捕捞机器人,包括捕捞机器人的本体,基于人工肌肉的具有海底行走和捕捞海底生物两种功能的四肢,用于感知水深的压力传感器,用于检测捕捞机器人行走方向的数字罗盘,用于获取捕捞机器人周边360°的全景立体视觉视频图像的双目立体全景视觉传感器和用于控制四肢协调海底行走、对捕捞对象的识别和空间定位、自主导航、控制捕捞动作以及与水面母船进行信息交互的智能体,与水面母船进行通信和能源设备提供设备连接的脐带。本发明提供一种具有自然柔顺性好、机构简单、控制复杂度低、制造和维护成本低、捕捞过程高效率的仿生海底生物捕捞机器人。
权利要求
1.一种仿生海底生物捕捞机器人,其特征在于:包括捕捞机器人的本体,基于人工肌肉的具有海底行走和捕捞海底生物两种功能的四肢,用于感知水深的压力传感器,用于检测捕捞机器人行走方向的数字罗盘,用于获取捕捞机器人周边360°的全景立体视觉视频图像的双目立体全景视觉传感器和用于控制四肢协调海底行走、对捕捞对象的识别和空间定位、自主导航、控制捕捞动作以及与水面母船进行信息交互的智能体,与水面母船进行通信和能源设备提供设备连接的脐带;
所述的捕捞机器人的本体内部分隔成为三个空间,一个空间为收集舱,位于本体的底部,用于存放捕捞对象;一个空间为控制设备仪器仪表舱,位于本体的背部,控制设备仪器仪表舱中安装着所述的智能体、其他控制仪器仪表以及备用电源,所述的脐带接入到控制设备仪器仪表舱内与所述的智能体通信接口和备用电源进行连接;一个空间为浮力舱,位于收集舱和控制设备仪器仪表舱之间,主要用于控制所述的捕捞机器人行走时的稳定性以及升降;
所述的双目立体全景视觉传感器,自带有为捕捞机器人提供照明的环形LED光源,固定在所述的捕捞机器人本体的背部上,用于获取仿生海底生物捕捞机器人周边的全景立体视觉视频图像,接入到控制设备仪器仪表舱内与所述的智能体的USB接口进行连接;
所述的压力传感器固定在所述的捕捞机器人本体的背部上,接入到控制设备仪器仪表舱内与所述的智能体的A/D接口进行连接,用于检测所述的捕捞机器人本体所受到的海水压力,从而从压力值推算出所述的捕捞机器人本体所处的深度;
所述的数字罗盘安置在控制设备仪器仪表舱内,与所述的智能体的I/O接口进行连接,用于检测所述的捕捞机器人的行走方向,根据所述的捕捞机器人行走控制与行走方向得到所述的捕捞机器人在海底行走的轨迹;
所述的智能体包括全景立体图像获取单元、与母船信息交互模块、升降控制模块、自主导航模块、行走控制模块、智能视频分析模块和捕捞控制模块;其中,
所述的全景立体图像获取单元,用于获取初始化信息和全景立体视频图像;
所述的与母船信息交互模块,用于将所述的捕捞机器人周围的全景立体视频图像传输给母船、接受从母船发出的控制指令;
所述的升降控制模块,用于控制所述的捕捞机器人的浮力舱中的真空量,以实现所述的捕捞机器人的升降;
所述的自主导航模块,用于从所述的双目立体全景视觉传感器获取的全景立体视觉视频图像,解析仿生海底生物捕捞机器人周围的地域环境,完成路径规划和避障任务;
所述的行走控制模块,用于控制所述的捕捞机器人的四肢的协调动作,以实现所述的捕捞机器人在海底的行走;
所述的智能视频分析模块,用于从所述的双目立体全景视觉传感器获取的全景立体视觉视频图像,从全景立体视觉视频图像中解析出捕捞对象、捕捞对象大小以及所处的空间位置,为针对性的捕捞提供捕捞口的空间位置信息;
所述的捕捞控制模块,用以控制所述的基于人工肌肉的捕捞管道的三个自由度的动作,使得捕捞口对准捕捞对象;当捕捞口对准捕捞对象时控制脉冲式负压发生模块动作产生脉冲式负压将捕捞对象吸入到捕捞管道中。
2.如权利要求1所述的仿生海底生物捕捞机器人,其特征在于:所述的四肢的一端固定在所述的捕捞机器人本体的收集舱两侧前后,类似于海龟的四肢,由人工肌肉制成;所述的四肢的外形呈管三自由度肌肉状,管内分隔成三个互成120°的扇形柱状空腔,通过分别控制三个空腔的水压力来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲,实现三个自由度的控制;在所述的捕捞机器人行走时,所述的四肢支撑着所述的捕捞机器人本体;在所述的捕捞机器人进行捕捞时,所述的四肢的前端对准捕捞对象实现对准捕捞对象吸入捕捞;在所述的四肢中设置有捕捞管道,以下简称基于人工肌肉的捕捞管道,当所述的四肢的前端对准捕捞对象时所述的捕捞管道中产生脉冲式负压,将捕捞对象吸入到所述的捕捞管道中,然后随着所述的捕捞管道进入到所述的捕捞舱内。
3.如权利要求1或2所述的仿生海底生物捕捞机器人,其特征在于:所述的收集舱在安装所述的四肢的部位配置有四个口,四个口的阀门开与关均由四个收集舱电磁阀控制,收集舱电磁阀处于开的状态时所述的捕捞管道与所述的收集舱是相通的;在所述的捕捞机器人行走时或者升降时,收集舱电磁阀处于关闭状态,这样能保证捕捞对象不会倒流到海中,同时也实现了对捕捞对象的保压;只有当所述的四肢的前端对准捕捞对象时,收集舱电磁阀处于开启状态;所述的收集舱固定在所述的捕捞机器人本体的底部,所述的捕捞机器人本体的底部与本体是可分离的;当所述的捕捞机器人完成捕捞作业后浮到海面上并收回到母船时,作业人员将所述的捕捞机器人本体的底部从本体上卸下,用内空的收集舱更换盛满了捕捞对象的收集舱,重新将所述的捕捞机器人本体的底部连接到本体上,然后将所述的捕捞机器人放入海中继续进行捕捞。
4.如权利要求1或2所述的仿生海底生物捕捞机器人,其特征在于:所述的浮力舱上开有两个口,一个口用浮力舱电磁阀控制其开和闭,当浮力舱电磁阀处于开的状态时浮力舱与外界相通,当浮力舱电磁阀处于闭的状态时所述的浮力舱与外界隔绝;另一个口与水泵输入口连接,水泵工作时将所述的浮力舱的海水抽出,在浮力舱中形成一定的真空,使得捕捞机器人上浮;因此当要控制捕捞机器人的下降时,控制浮力舱电磁阀打开让海水进入所述的浮力舱;当要控制捕捞机器人的上升时,控制浮力舱电磁阀关闭然后使水泵工作让所述的浮力舱中的海水抽出,使得捕捞机器人具有向上的浮力。
5.如权利要求1或2所述的仿生海底生物捕捞机器人,其特征在于:所述的基于人工肌肉的捕捞管道的外形呈管三自由度肌肉状,管内分隔成三个互成120°的扇形柱状空腔;通过分别控制三个空腔的压力来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲,实现三个自由度的控制;在所述的基于人工肌肉的捕捞管道的内外管壁的橡胶基体中,夹有芳香族聚酰胺增强纤维,纤维走向与肌肉的轴向有一夹角α,考虑到所述的基于人工肌肉的捕捞管道的柔软性,将夹角α设计为70°~80°;
将所述的基于人工肌肉的捕捞管道分成管道终端、管道终端密封体、管道本体、管道连接密封体、管道连接法兰和通液管;其组装过程是:首先,将所述的管道终端密封体插入所述的管道本体的一端,接着将所述的管道终端盖住所述的管道终端密封体并用自攻螺钉将所述的管道终端密封体和所述的管道本体的一端固定在一起;将所述的管道连接密封体插入所述的管道本体的另一端,接着将所述的管道连接法兰的三个孔对准所述的管道连接密封体的三个孔并盖住,然后将所述的管道连接密封体和所述的管道本体的另一端固定连接在一起,最后将三根通液管分别插入所述的管道连接法兰的三个孔中;组装后的所述的基于人工肌肉的捕捞管道中的捕捞通道是上下连通的;捕捞通道与捕捞舱连通;所述的基于人工肌肉的捕捞管道中的三个空腔只与三根通液管分别对应连通,空腔与外界保持密封状态;通过所述的管道连接法兰与所述的捕捞机器人的本体连接;所述的基于人工肌肉的捕捞管道终端的入口成喇叭型;
所述的基于人工肌肉的捕捞管道的捕捞通道根据不同的捕捞对象大小进行设计,并考虑能有效支撑捕捞通道中的最小口径略大于捕捞对象的最大直径,最小口径φrmin设计计算方法用公式(1)表示,
40mm>φrmin-φomax≥20mm (1)
式中,φrmin为捕捞通道的最小口径、φomax为捕捞对象的最大直径。
6.如权利要求1或2所述的仿生海底生物捕捞机器人,其特征在于:所述的四肢和所述的基于人工肌肉的捕捞管道,沿中心轴Z方向的伸缩及任意一个方向的弯曲控制采用液压比例压力控制技术来实现;高压水源通过三个比例压力阀分别与所述的基于人工肌肉的捕捞管道的三个空腔连接,用三个压力传感器检测所述的基于人工肌肉的捕捞管道的三个空腔内的液体压力,压力传感器通过A/D转换器与计算和控制设备相连,计算和控制设备通过D/A和功率放大器与比例压力阀相连;当计算得到某一空腔的控制压力后,计算和控制设备通过D/A输出一个电压量控制比例压力阀的开口大小,以调节空腔内的液体压力,同时压力传感器检测该空腔内的液体压力,如果空腔内的液体压力恒定在期望控制压力范围内时控制比例压力阀关闭以保持空腔内的液体压力在期望值内;因此,所述的基于人工肌肉的捕捞管道的控制将分解为三个空腔内液体压力的比例控制。
7.如权利要求1或2所述的仿生海底生物捕捞机器人,其特征在于:所述的脉冲式负压发生模块,用于发出一种脉冲式真空液流实现对捕捞对象的负压吸取捕捞,然后通过所述的基于人工肌肉的捕捞管道吸入捕捞对象,并顺着捕捞管道将捕捞对象收集到捕捞对象收集舱中,其作用类似于机器手的手指,与机器手配合完成整个捕捞动作;所述的脉冲式负压发生模块包括二位三通阀、高压水源和喷嘴,所述的高压水源通过管道经所述的二位三通阀与所述的喷嘴进行连接,所述的喷嘴方向朝着捕捞对象收集舱,当所述的二位三通阀通电时所述的高压水源为所述的喷嘴提供高压液体,根据引射原理,这时在捕捞管道中形成真空负压;通过控制所述的二位三通液压阀的开与关,在捕捞管道中产生一种脉冲式真空负压。
8.如权利要求1或2所述的仿生海底生物捕捞机器人,其特征在于:所述的捕捞控制模块,需要将所述的双目立体全景视觉传感器及智能视频分析模块识别和定位后的捕捞对象的空间位置与所述的捕捞控制模块控制的捕捞口对准捕捞对象空间位置之间建立映射关系;这里将所述的双目立体全景视觉传感器中的下面一个全景视觉传感器的视点作为视觉坐标系的原点,并建立Xv、Yv和Zv构成的三维全景视觉坐标系;将所述的基于人工肌肉的捕捞管道与捕捞机器人的行走部分固定处的中心作为捕捞机械手的坐标原点,并建立Xa、Ya和Za构成的三维机械手运动坐标系;由于双目立体全景视觉传感器和基于人工肌肉的捕捞管道均固定在捕捞机器人的行走部分的上面,因此,用公式(2)建立三维全景视觉坐标系和三维捕捞机械手运动坐标系的几何关系;
式中,Xa、Ya和Za分别表示三维捕捞机械手运动坐标系,Xv、Yv和Zv分别表示三维全景视觉坐标系,x、y和z分别表示两个坐标系原点之间在三维坐标上的投影距离。
9.如权利要求1或2所述的仿生海底生物捕捞机器人,其特征在于:所述的捕捞控制模块,采用分别控制所述的基于人工肌肉的捕捞管道中的三个空腔的压力(p1,p2,p3)来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲;对于每一组控制压力值(p1,p2,p3)在所述的基于人工肌肉的捕捞管道的捕捞端都会有相应的空间位置坐标值(xa,ya,za);因此,通过实验方法来建立所述的基于人工肌肉的捕捞管道中的三个空腔的压力值(p1,p2,p3)与所述的基于人工肌肉的捕捞管道的捕捞端的空间位置坐标值(xa,ya,za)的对应关系,将这个过程称为标定过程;通过标定建立这样的映射关系后,对于某一个希望的所述的基于人工肌肉的捕捞管道的捕捞端的空间位置坐标值(xa,ya,za)就能方便地计算得到所需要的一组所述的基于人工肌肉的捕捞管道的三个空腔的控制压力值(p1,p2,p3);由于用实验方法建立的映射关系是离散的,而空间位置坐标值(xa,ya,za)和空腔的控制压力值(p1,p2,p3)是连续的变量,因此在计算所需要的一组控制压力值(p1,p2,p3)时需要采用插值的方式,这里将所述的基于人工肌肉的捕捞管道的捕捞端的空间位置划分为若干个空间网格,如果某一个希望的所述的基于人工肌肉的捕捞管道的前端的空间位置坐标值并不处在某个空间网格的中心,那么就需要对该空间位置坐标值所处的空间网格以及三个相邻的空间网格进行插值运算,得到三个空腔的准确控制压力值;或者采用神经网络技术来实现空间位置坐标值(xa,ya,za)和空腔的控制压力值(p1,p2,p3)的映射关系。
10.如权利要求1或2所述的仿生海底生物捕捞机器人,其特征在于:所述的脐带主要由单模光纤线和电芯线构成,所述的脐带的一端连着母船,另一端连着所述的仿生海底生物捕捞机器人;电芯线和单模光缆线均为单内涂层;这些线的外面模压或填充柔软而耐用的模压树脂或纤维,所述的脐带的外表面履盖耐磨材料层;把镀锡铜线用作电芯线;把聚乙烯或聚丙烯用作电芯线的内涂层的材料;把凯夫拉纤维或碳树脂用作模压树脂,把聚乙烯或聚丙烯用作耐磨外涂层的材料;把特氛隆用作单模光纤线的内涂层的材料;单模光纤线为水面母船与智能体之间提供信息交互的通道,电芯线为所述的捕捞机器人提供电源。
说明书
技术领域
本发明属于全景立体视觉技术、气动伺服控制技术和水下机器人技术在海底生物资源探索和捕捞方面的应用,尤其适用于海参等海底栖生物的捕捞。
背景技术
深海生物捕捞,即对深海生物进行捕捞,把生物从深海捕获出水进行科学研究或者其他商业用途。目前通常采用一种拖网捕获技术,它是一种利用船舶航行的拖拽式捕捞方式。底拖网是一种用于对深海底栖生物等小型生物进行捕获技术。这种底拖网技术对生态系统造成了灾难性伤害,珊瑚、海绵、鱼类和其它动物都将因此受到捕杀。同时众多海洋生物的栖息地—海山等水下生态系统也遭到了严重的破坏。这种捕捞方式对海洋生态系统造成了无法弥补的损失。由于拖网技术很难对生物进行有针对性的捕获,往往造成不分青红皂白的“滥杀无辜”,成功率低且浪费资源。
近年来水下机器人越来越多地运用于人类对深海资源的探索。其中,对深海生物资源的探索也是极为重要的一环。深潜器最直观的优点在于科学家可以远程进行操控并且针对性高,也不会对深海环境造成破坏。但是目前水下机器人十分昂贵,应用于商业用途的海底生物捕捞仍然存在着很多问题。
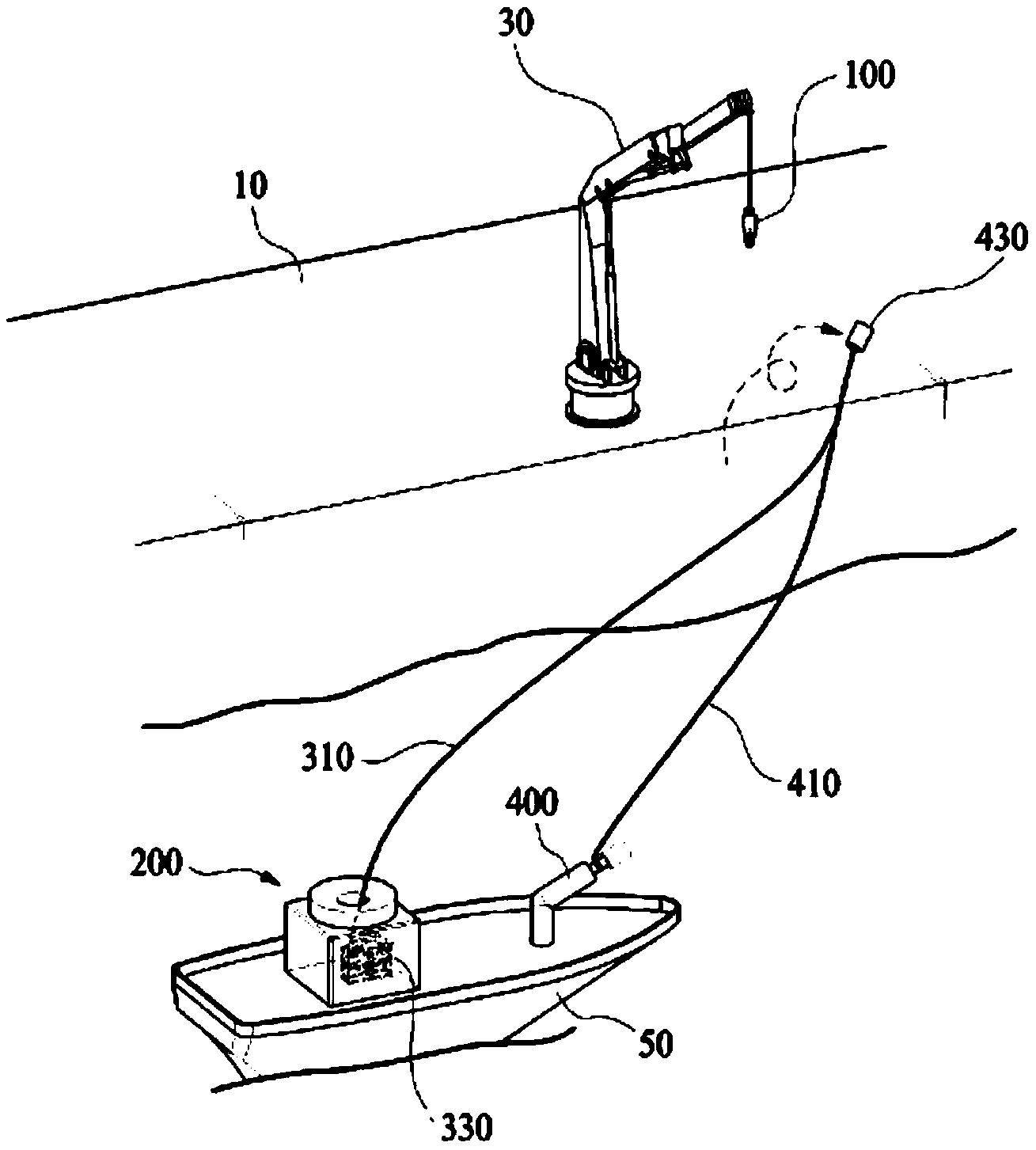
水下机器人又称无人遥控潜水器,其工作方式是由水面母船上的工作人员通过连接潜水器的脐带提供动力,操纵或控制潜水器,采用水下电视、声呐等专用设备进行观察,并由机械手进行水下作业。在深海生物捕获中,水下机器人使用机械手把捕获的生物放入收集舱中带上水面。其中水下电视系统是最具有发展潜力的一种观察设备。如美国的伍兹霍尔(Woods Hole)海洋研究所开发了一台名为“全球最棒的漂流者”的深潜水下机器人,它配备有高清晰度摄像头,能在深达3000米的水下工作,科学家可远距离操作,将水中抓获的生物存放在机器人的收集舱中。但是,目前使用在水下机器人中的水下电视系统所获取的图像仍然是平面视觉信息,无法获得被捕获对象的深度信息;而且视觉范围十分有限。这种水下机器人的制造成本极其昂贵。
针对一些小型深海生物捕捞,研究人员研制了一种像双瓣贝壳的“大洋抓斗”,在撞击到海底时能快速闭合,将样品全部“抓”到斗内。此外,研究人员还设计了箱式取样器、重力取样器和活塞取样器等,将它们垂直下放到海底,利用特殊装置迅速将样品完好地取上来,这样就能对沉积物逐层加以研究。这种捕捞方式作业效率低,制造成本高。
自然界很多动物获取食物的方式给我们设计带来一些启示,即仿生海底生物捕捞机器手设计,如大象的鼻子能轻而易举地把树上的果子摘下,能将地面上的草连根拔起,能吸取水池中的水,象的鼻腔后面食道上方,有一块特殊的软骨,起“阀门”一样的作用。象吸水时,喉咙部位的肌肉收缩,“阀门”关闭,水可以顺利进入食道,大象的鼻子像人手一样灵活。研究表明,大象鼻子是近4万块富有弹性的小肌肉组成,它能极灵活地伸缩自如,作出灵巧地动作。在仿生海底生物捕捞机器手设计时,将捕捞机器手上的管道设计成如大象的鼻子,将捕捞过程模拟为象的鼻腔吸入捕捞对象的过程。有些海底生物在捕获食物时采用嘴部的吸力来吞取被捕获的对象,具有与大象的鼻子类似的功能。
对于海底生物捕捞过程,首先控制犹如大象鼻子的捕捞管道对准被捕捞的海底生物,然后利用捕捞管道内的负压发生装置产生真空脉冲来吸入被捕捞的海底生物,最后吸入的被捕捞的海底生物通过管道自动地滑落到水下机器人的收集舱,从而完成整个海底生物的捕捞过程;这种海底生物的捕捞动作是在瞬间完成,能有效提高捕捞速度;由于采用了真空脉冲式的吸入海底生物,能有效减少捕捞过程中的能耗,实现有针对性的高效捕获。
一种理想的仿生海底生物捕捞机器手设计采用人工肌肉实现的末端执行器具有柔顺性、灵巧性,其中人工肌肉技术来模拟大象的鼻子是一种最佳的选择设计方案。人工肌肉除了具有气压传动技术所具有的低成本、清洁、安装简便等优点之外,还具有高功率/质量比、自然柔顺性、与生物肌肉类似的力学特性等优点。
早在1900年,“机构学之父”REULEAUX在关于生物机构学的研究中就提到了采用橡胶管模拟生物肌肉的原理。1913年,WILKINS发明了一种廉价可靠的管状膜片驱动器;真正有关人工肌肉的应用研究从20世纪80年代开始;日本Bridgestone公司基于早期的McKibben型气动肌肉重新设计推出了Rubbertuator驱动器,并应用于多关节柔性臂Soft arm,吸引了一些研究者的关注,从此人工肌肉进入了实际应用领域,其潜在价值逐渐被人们认识,应用研究工作也蓬勃兴起。目前人工肌肉的主要研究还仅仅局限于柔性臂、柔性手和柔性腿等方面,类似于大象鼻子的具有捕捞功能的仿生海底生物捕捞机器手的研究非常鲜见。
一般来说,仿生海底生物捕捞机器人主要涉及三个技术领域:1)本体结构设计;2)水下机器人的自主导航;3)捕捞目标的定位识别与捕捞。本发明主要解决本体结构设计、捕捞目标的定位识别和捕捞末端执行器的设计。
实现仿生海底生物捕捞机器人的关键技术是:1)海底生物捕捞管道的设计,捕捞管道能通过控制通入管道内空腔的压力来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲,以实现捕捞管道对准捕捞对象的动作;2)在捕捞管道对准捕捞对象时能自动产生真空脉冲来吸入捕捞对象;3)基于机器视觉的捕捞对象的自动识别技术,在水下机器人行走过程中自动发现捕捞对象;4)基于3D全景立体视觉的捕捞对象的定位技术,在水下机器人发现捕捞对象后计算出捕捞对象与水下机器人的海底生物捕捞管道的中心点的空间位置,为捕捞管道对准捕捞对象提供空间位置信息。
发明内容
为了克服已有的海底生物捕捞装置的自然柔顺性差、机构复杂、控制复杂度高、制造和维护成本昂贵、难以实现高效的针对性的捕捞等不足,本发明提供一种具有自然柔顺性好、机构简单、控制复杂度低、制造和维护成本低、捕捞过程高效率的仿生海底生物捕捞机器人。
本发明解决其技术问题所采用的技术方案是:
一种仿生海底生物捕捞机器人,包括捕捞机器人的本体,基于人工肌肉的具有海底行走和捕捞海底生物两种功能的四肢,用于感知水深的压力传感器,用于检测捕捞机器人行走方向的数字罗盘,用于获取捕捞机器人周边360°的全景立体视觉视频图像的双目立体全景视觉传感器和用于控制四肢协调海底行走、对捕捞对象的识别和空间定位、自主导航、控制捕捞动作以及与水面母船进行信息交互的智能体,以下简称Agent,与水面母船进行通信和能源设备提供设备连接的脐带;
所述的捕捞机器人本体,所述的捕捞机器人本体内部分隔成为三个空间,一个空间为收集舱,位于本体的底部,用于存放捕捞对象;一个空间为控制设备仪器仪表舱,位于本体的背部,控制设备仪器仪表舱中安装着所述的智能体、其他控制仪器仪表以及备用电源,所述的脐带接入到控制设备仪器仪表舱内与所述的智能体通信接口和备用电源进行连接;所述的双目立体全景视觉传感器,自带有为捕捞机器人提供照明的环形LED光源,固定在所述的捕捞机器人本体的背部上,用于获取仿生海底生物捕捞机器人周边的全景立体视觉视频图像,接入到控制设备仪器仪表舱内与所述的智能体的USB接口进行连接;所述的压力传感器,固定在所述的捕捞机器人本体的背部上,接入到控制设备仪器仪表舱内与所述的智能体的A/D接口进行连接,用于检测所述的捕捞机器人本体所受到的海水压力,从而从压力值推算出所述的捕捞机器人本体所处的深度;所述的数字罗盘,安置在控制设备仪器仪表舱内,与所述的智能体的I/O接口进行连接,用于检测所述的捕捞机器人的行走方向,根据所述的捕捞机器人行走控制与行走方向得到所述的捕捞机器人在海底行走的轨迹;一个空间为浮力舱,位于收集舱和控制设备仪器仪表舱之间,主要用于控制所述的捕捞机器人行走时的稳定性以及升降;
所述的浮力舱上开有两个口,一个口用电磁阀控制其开和闭,当开的状态时浮力舱与外界相通,当闭的状态时浮力舱与外界隔绝;另一个口与水泵输入口连接,水泵工作时将浮力舱的海水抽出,在浮力舱中形成一定的真空,使得捕捞机器人上浮;因此当要控制捕捞机器人的下降时,控制电磁阀开让海水进入所述的浮力舱;当要控制捕捞机器人的上升时,控制电磁阀关闭然后使水泵工作让所述的浮力舱中的海水抽出,使得捕捞机器人具有向上的浮力;
所述的四肢的一端固定在所述的捕捞机器人本体的收集舱两侧前后,非常类似于海龟的四肢,由人工肌肉制成;所述的四肢的外形呈管三自由度肌肉状,管内分隔成三个互成120°的扇形柱状空腔,通过分别控制三个空腔的水压力来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲,实现三个自由度的控制;在所述的捕捞机器人行走时,所述的四肢支撑着所述的捕捞机器人本体,如附图4所示;在所述的捕捞机器人进行捕捞时,所述的四肢的前端对准捕捞对象实现对准捕捞对象吸入捕捞;在所述的四肢中设置有捕捞管道,以下简称基于人工肌肉的捕捞管道,当所述的四肢的前端对准捕捞对象时所述的捕捞管道中产生脉冲式负压,将捕捞对象吸入到所述的捕捞管道中,然后随着所述的捕捞管道进入到所述的捕捞舱内,如附图5所示;因此,所述的四肢有两个功能,一个功能是实现捕捞机器人在海底的行走,另一个功能是实现捕捞对象吸入捕捞;为了从功能方面进行区分,本发明将用于行走功能的定义为基于人工肌肉的四肢,将用于捕捞功能的定义为基于人工肌肉的捕捞管道;
所述的收集舱在安装所述的四肢的部位配置有四个口,四个口的开关均由四个收集舱电磁阀控制,收集舱电磁阀处于开的状态时所述的捕捞管道与所述的收集舱是相通的;在所述的捕捞机器人行走时或者升降时,收集舱电磁阀处于关闭状态,这样能保证捕捞对象不会倒流到海中,同时也实现了对捕捞对象的保压;只有当所述的四肢的前端对准捕捞对象时,收集舱电磁阀处于开启状态;所述的收集舱固定在所述的捕捞机器人本体的底部,所述的捕捞机器人本体的底部与本体是可分离的;当所述的捕捞机器人完成捕捞作业后浮到海面上并收回到母船时,作业人员将所述的捕捞机器人本体的底部从本体上卸下,用空的收集舱更换盛满了捕捞对象的收集舱,重新将所述的捕捞机器人本体的底部连接到本体上,然后将所述的捕捞机器人放入海中继续进行捕捞;由于盛满了捕捞对象的收集舱的电磁阀处于关闭状态,所以收集舱仍然处于保压状态,收集舱的捕捞对象保持着海底生存时的压力,有利于提高所捕获生物的存活率;
所述的脐带主要由单模光纤线和电芯线构成,采用单模光纤线主要是为了满足传输3000米左右的信息需要;电芯线和单模光缆线均为单内涂层;这些线的外面模压或填充柔软而耐用的模压树脂或纤维,所述的脐带的外表面履盖耐磨材料层;把镀锡铜线用作电芯线;把聚乙烯或聚丙烯用作电芯线的内涂层的材料;把凯夫拉纤维或碳树脂用作模压树脂,把聚乙烯或聚丙烯用作耐磨外涂层的材料;把特氛隆用作单模光纤线的内涂层的材料;单模光纤线为水面母船与智能体之间提供信息交互的通道,电芯线为所述的捕捞机器人提供电源;
控制四肢的三个自由度动作装置的包括:用于通入所述的四肢中捕捞管道内空腔的压力发生器,用于对通入各捕捞管道内空腔的压力进行控制的压力比例控制阀,用于对通入各捕捞管道内空腔的压力进行检测的压力传感器,用于对各压力比例控制阀进行协调控制的压力比例控制器,用于吸入捕捞对象的脉冲式负压发生模块,用于控制执行捕捞动作的捕捞控制模块,用于控制行走动作的行走控制模块;
所述的行走控制模块,从属于Agent,用以控制所述的基于人工肌肉的四肢完成三个自由度的协调动作,使得所述的捕捞机器人实现向前、向后、向左和向右的移动;
所述的捕捞控制模块,从属于Agent,用以控制所述的基于人工肌肉的捕捞管道的三个自由度的动作,使得捕捞口对准捕捞对象;当捕捞口对准捕捞对象时控制所述的脉冲式负压发生模块动作产生脉冲式负压将捕捞对象吸入到捕捞管道中;
所述的Agent还包括全景立体图像获取单元、自主导航模块和智能视频分析模块、与母船信息交互模块,任务规划行为模块;
所述的全景立体图像获取单元,用于获取初始化信息和全景立体视频图像;
所述的自主导航模块,用于从所述的双目立体全景视觉传感器获取的全景立体视觉视频图像,解析仿生海底生物捕捞机器人周围的地域环境,完成路径规划和避障任务;
所述的智能视频分析模块,用于从所述的双目立体全景视觉传感器获取的全景立体视觉视频图像,从全景立体视觉视频图像中解析出捕捞对象、捕捞对象大小以及所处的空间位置,为针对性的捕捞提供捕捞口的空间位置信息;
所述的与母船信息交互模块,用于将所述的捕捞机器人周围的全景立体视频图像传输给母船、接受从母船发出的控制指令;包括以下交互行为:1)请求干预的交互行为,当捕捞机器人发生紧急事件、捕捞机器人的收集舱已满等情况时,请求捕捞管理人员干预;2)接受捕捞调度指令的交互行为,当捕捞管理人员下达捕捞任务后,将捕捞任务转达给所述的任务规划行为模块,在所述的任务规划行为模块做出遍历路径规划后,将遍历路径规划反馈给母船上的管理人员;3)协商的交互行为,根据所述的Agent根据自身感知的情况,通过对自身知识的推理,能向母船上的管理人员提供适当的帮助和建议;4)提供捕捞现场信息的交互行为,负责响应来自捕捞管理人员的上传信息指令,将所述的Agent所感知到的全景视频信息、捕捞机器人的行走方向和深度信息和分析得到的状态信息上传给捕捞管理人员;
进一步,所述的基于人工肌肉的捕捞管道,所述捕捞管道的外形呈管三自由度肌肉状,管内分隔成三个互成120°的扇形柱状空腔,如附图1所示;通过分别控制三个空腔的压力来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲,实现三个自由度的控制;在所述的基于人工肌肉的捕捞管道的内外管壁的橡胶基体中,夹有芳香族聚酰胺增强纤维,纤维走向与肌肉的轴向有一夹角α,考虑到所述的基于人工肌肉的捕捞管道的柔软性,将夹角α设计为70°~80°;这样由于纤维单方向增强效果的影响,沿垂直于纤维方向的变形比沿纤维方向变形容易得多;
将所述的基于人工肌肉的捕捞管道分成若干个部件,包括管道终端、管道终端密封体、管道本体、管道连接密封体、管道连接法兰和通液管;其组装过程是:首先,将所述的管道终端密封体插入所述的管道本体的一端,接着将所述的管道终端盖住所述的管道终端密封体并用自攻螺钉将所述的管道终端密封体和所述的管道本体的一端固定在一起;将所述的管道连接密封体插入所述的管道本体的另一端,接着将所述的管道连接法兰的三个孔对准所述的管道连接密封体的三个孔并盖住,然后将所述的管道连接密封体和所述的管道本体的另一端固定连接在一起,最后将三根通液管分别插入所述的管道连接法兰的三个孔中;组装后的所述的基于人工肌肉的捕捞管道中的捕捞通道是上下连通的;捕捞通道与捕捞舱连通;所述的基于人工肌肉的捕捞管道中的三个空腔只与三根通液管分别对应连通,空腔与外界保持密封状态;通过所述的管道连接法兰与所述的捕捞机器人的本体连接;所述的基于人工肌肉的捕捞管道终端的入口成喇叭型,如附图6所示;
所述的基于人工肌肉的捕捞管道的捕捞通道根据不同的捕捞对象大小进行设计,并考虑能有效支撑捕捞通道中的最小口径略大于捕捞对象的最大直径,最小口径φrmin设计计算方法用公式(1)表示,
40mm>φrmin-φomax≥20mm (1)
式中,φrmin为捕捞通道的最小口径、φomax为捕捞对象的最大直径;
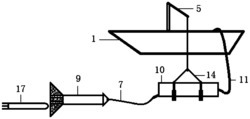
所述的脉冲式负压发生模块,用于发出一种脉冲式真空液流实现对捕捞对象的负压吸取捕捞,然后通过所述的基于人工肌肉的捕捞管道吸入捕捞对象,并顺着捕捞管道将捕捞对象收集到捕捞对象收集舱中,其作用类似于机器手的手指,与机器手配合完成整个捕捞动作;所述的脉冲式负压发生模块包括二位三通阀、高压水源和喷嘴,所述的高压水源通过管道经所述的二位三通阀与所述的喷嘴进行连接,所述的喷嘴方向朝着捕捞对象收集舱,当所述的二位三通阀通电时所述的高压水源为所述的喷嘴提供高压液体,根据引射原理,这时在捕捞管道中形成真空负压;通过控制所述的二位三通液压阀的开与关,在捕捞管道中产生一种脉冲式真空液流;
所述的捕捞控制模块,需要将所述的双目立体全景视觉传感器及智能视频分析模块识别和定位后的捕捞对象的空间位置与所述的捕捞控制模块控制的捕捞口对准捕捞对象空间位置之间建立映射关系;这里将所述的双目立体全景视觉传感器中的下面一个全景视觉传感器的视点作为视觉坐标系的原点,并建立Xv、Yv和Zv构成的三维全景视觉坐标系;将所述的基于人工肌肉的捕捞管道与捕捞机器人的行走部分固定处的中心作为捕捞机械手的坐标原点,并建立Xa、Ya和Za构成的三维机械手运动坐标系;由于双目立体全景视觉传感器和基于人工肌肉的捕捞管道均固定在捕捞机器人的行走部分的上面,因此,用公式(2)建立三维全景视觉坐标系和三维捕捞机械手运动坐标系的几何关系;
式中,Xa、Ya和Za分别表示三维捕捞机械手运动坐标系,Xv、Yv和Zv分别表示三维全景视觉坐标系,x、y和z分别表示两个坐标系原点之间在三维坐标上的投影距离。
所述的捕捞控制模块,采用分别控制所述的基于人工肌肉的捕捞管道中的三个空腔的压力(p1,p2,p3)来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲;对于每一组控制压力值(p1,p2,p3)在所述的基于人工肌肉的捕捞管道的捕捞端都会有相应的空间位置坐标值(xa,ya,za);因此,通过实验方法来建立所述的基于人工肌肉的捕捞管道中的三个空腔的压力值(p1,p2,p3)与所述的基于人工肌肉的捕捞管道的捕捞端的空间位置坐标值(xa,ya,za)的对应关系,我们将这个过程称为标定过程;通过标定建立这样的映射关系后,对于某一个希望的所述的基于人工肌肉的捕捞管道的捕捞端的空间位置坐标值(xa,ya,za)就能方便地计算得到所需要的一组所述的基于人工肌肉的捕捞管道的三个空腔的控制压力值(p1,p2,p3);由于用实验方法建立的映射关系是离散的,而空间位置坐标值(xa,ya,za)和空腔的控制压力值(p1,p2,p3)是连续的变量,因此在计算所需要的一组控制压力值(p1,p2,p3)时需要采用插值的方式,这里将所述的基于人工肌肉的捕捞管道的捕捞端的空间位置划分为若干个空间网格,如果某一个希望的所述的基于人工肌肉的捕捞管道的前端的空间位置坐标值并不处在某个空间网格的中心,那么就需要对该空间位置坐标值所处的空间网格以及三个相邻的空间网格进行插值运算,得到三个空腔的准确控制压力值;或者采用神经网络技术来实现空间位置坐标值(xa,ya,za)和空腔的控制压力值(p1,p2,p3)的映射关系。
所述的基于人工肌肉的捕捞管道,沿中心轴Z方向的伸缩及任意一个方向的弯曲控制采用液压比例压力控制技术来实现;高压水源通过三个比例压力阀分别与所述的基于人工肌肉的捕捞管道的三个空腔连接,用三个压力传感器检测所述的基于人工肌肉的捕捞管道的三个空腔内的液体压力,压力传感器通过A/D转换器与计算和控制设备相连,计算和控制设备通过D/A和功率放大器与比例压力阀相连;当计算得到某一空腔的控制压力后,计算和控制设备通过D/A输出一个电压量控制比例压力阀的开口大小,以调节空腔内的液体压力,同时压力传感器检测该空腔内的液体压力,如果空腔内的液体压力恒定在期望控制压力范围内时控制比例压力阀关闭以保持空腔内的液体压力在期望值内;因此,所述的基于人工肌肉的捕捞管道的控制将分解为三个空腔内液体压力的比例控制。
所述的捕捞控制模块,当所述的基于人工肌肉的捕捞管道的捕捞端对准捕捞对象时,所述的Agent通过I/O接口触发所述的脉冲式负压发生模块,发出一种脉冲式负压实现对捕捞对象的负压吸取捕捞,捕捞对象顺着所述的基于人工肌肉的捕捞管道将捕捞对象收集到所述的捕捞对象收集舱中。
本发明的有益效果主要表现在:1、采用人工肌肉技术来实现捕捞机器手,因而结构简单、柔顺性、灵巧性好,捕捞过程中不损害捕捞对象和不破坏海底的生态环境;2、采用脉冲式负压实现对捕捞对象的负压吸取捕捞,因而能在保证捕捞过程中针对性捕捞同时具有较好的节能效果;3、在捕捞机器人上同时安置四个捕捞管道(捕捞机器手),可实现全方位并行捕捞作业,因而能有效地提高捕捞效率;4、在捕捞机器人和机器手的设计方法均采用了仿生设计技术,使得设计完全适应海洋环境自然并且其程度又能接近完美;5、捕捞对象收集舱始终保持着与海底压力相同的环境条件,提高了捕捞对象的存活率;6、捕捞机器人与母船进行实时信息交互,母船上的工作人员能实时看到海底的立体全景视频图像,为海底生物调查提供了一种新的方法。
附图说明
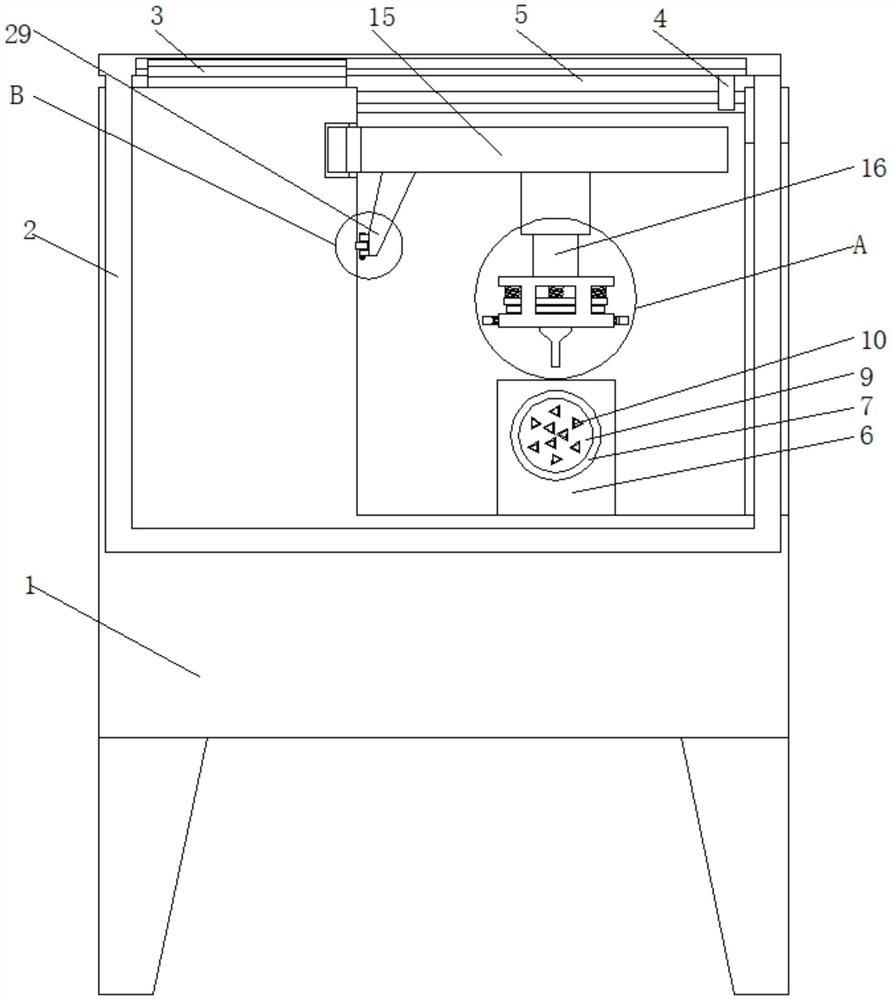
图1为一种采用人工肌肉技术来实现捕捞机器手的示意图;
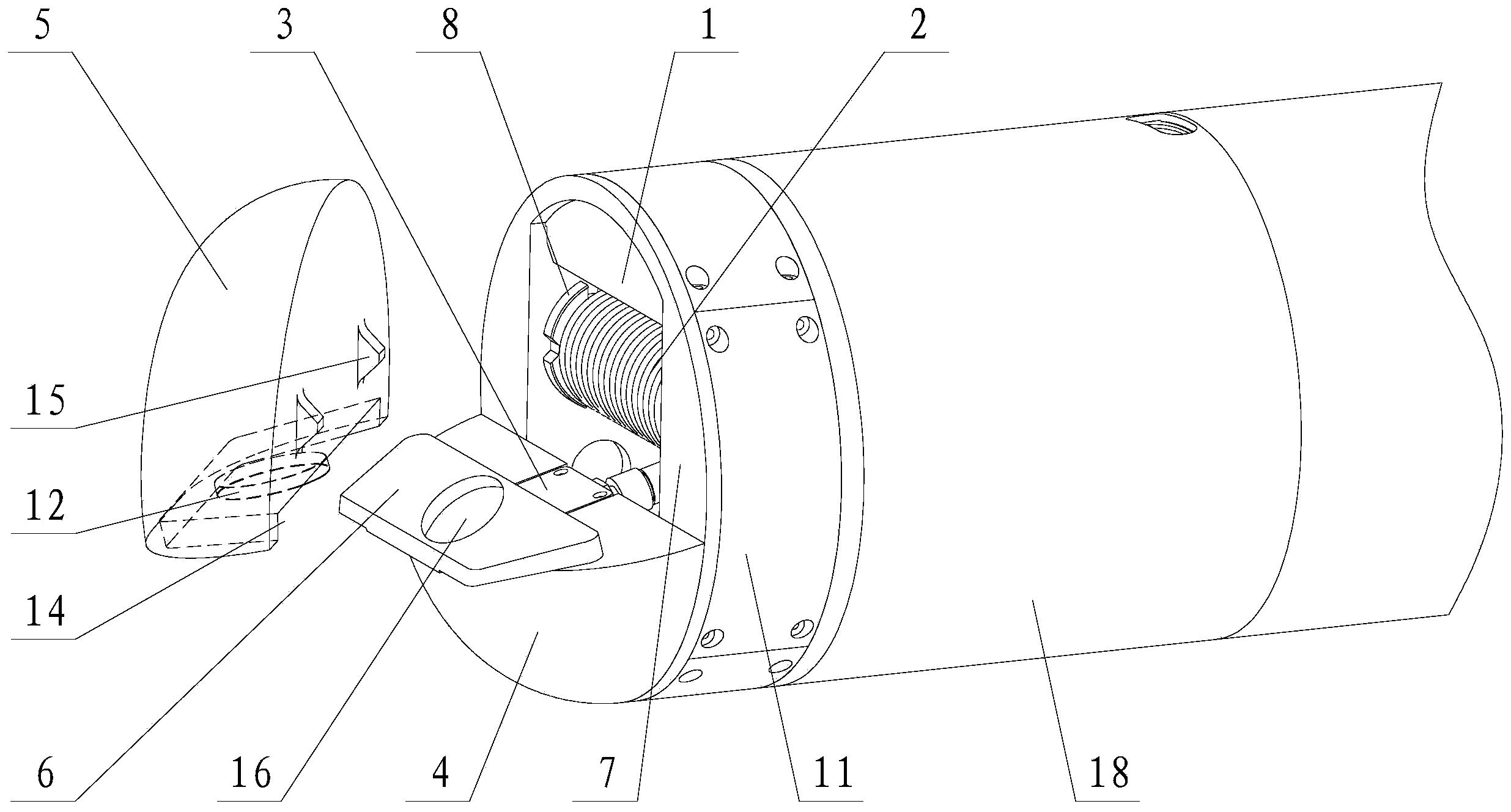
图2为一种人工肌肉制造装配技术示意图,其中,1为管道终端,2为管道终端密封体,3为管道本体,4为管道连接密封体,5为管道连接法兰,6为通高压液体管;
图3为人工肌肉技术实现任意一个方向的弯曲的示意图;
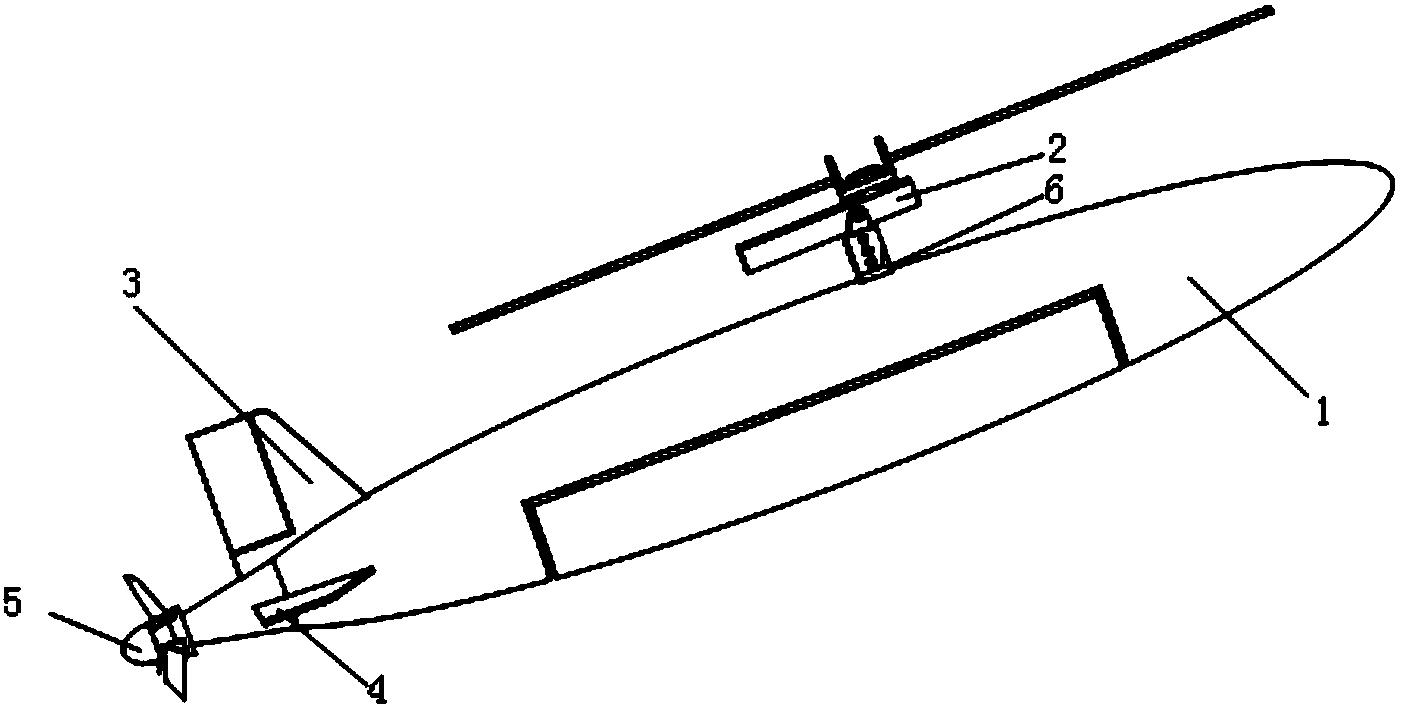
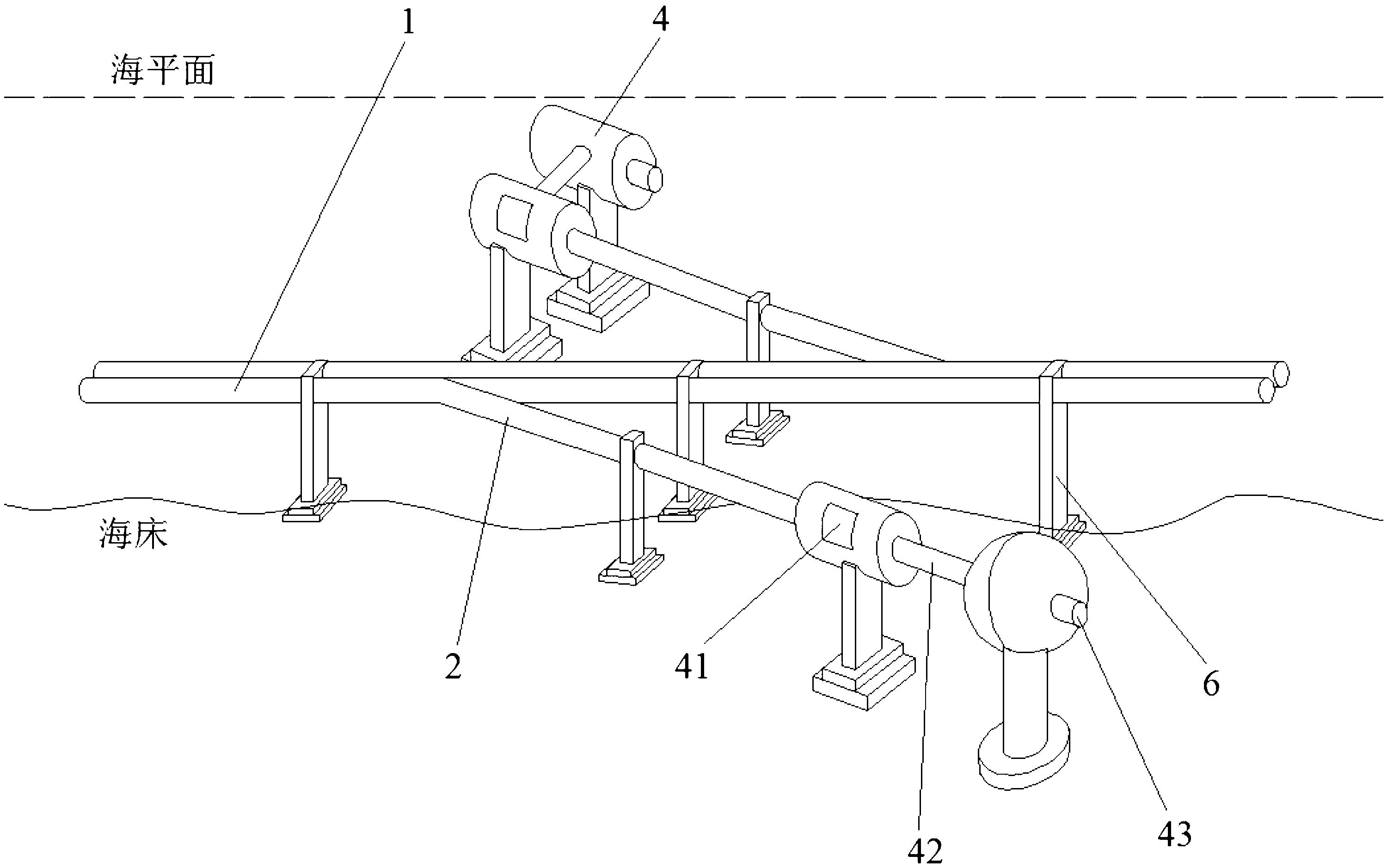
图4为仿生海底生物捕捞机器人的行走状态说明图,其中,21为本体,22为四肢,23为收集舱,24为浮力舱,25为控制设备仪器仪表舱,26为双目立体全景视觉传感器;
图5为仿生海底生物捕捞机器人的捕捞状态说明图,其中,21为本体,23为收集舱,24为浮力舱,25为控制设备仪器仪表舱,26为双目立体全景视觉传感器,27为捕捞管道,28为海参等海底生物;
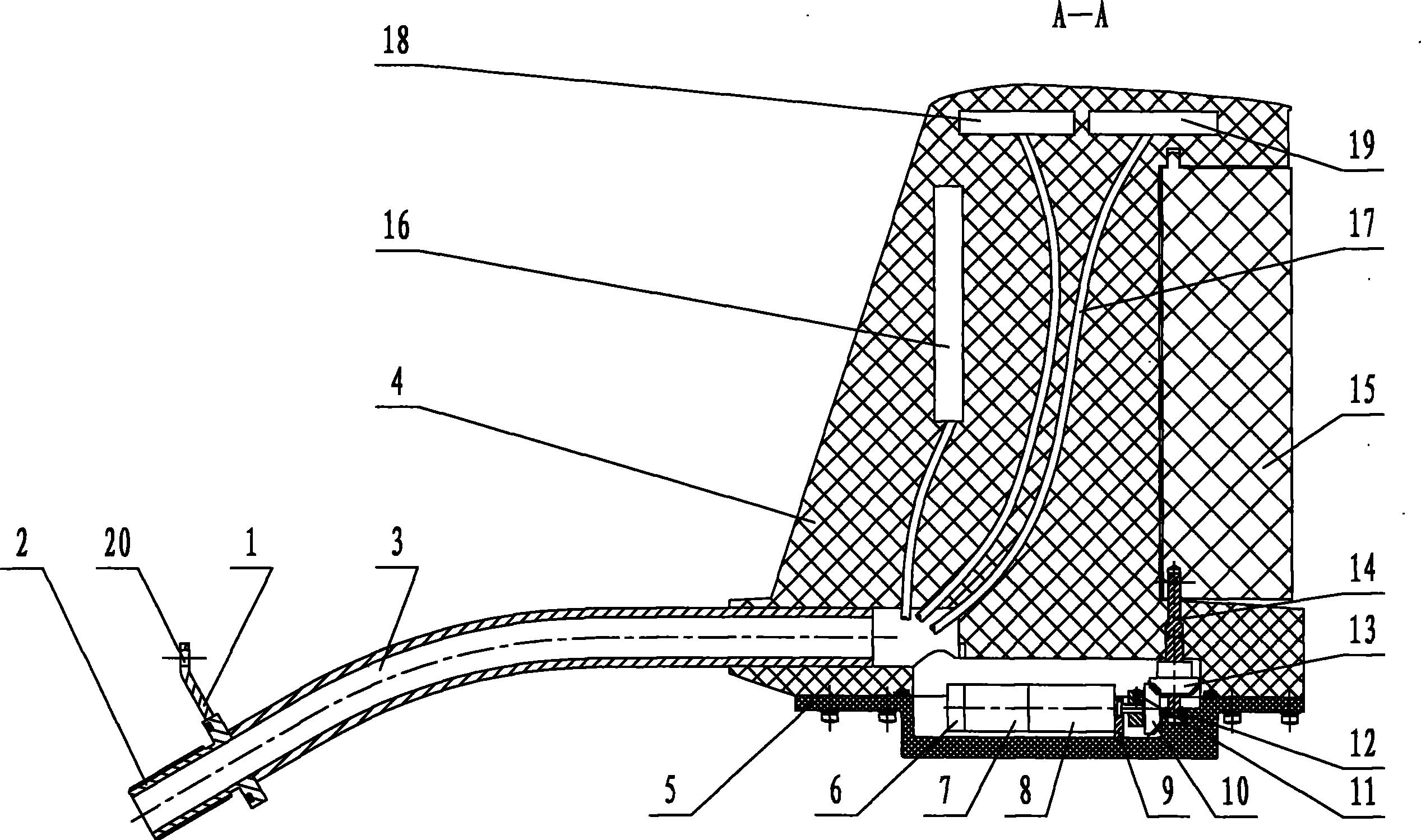
图6为基于人工肌肉的捕捞管道捕捞端口的剖面图;
图7为一种仿生海底生物捕捞机器人的四肢运动控制与捕捞动作控制的框图;
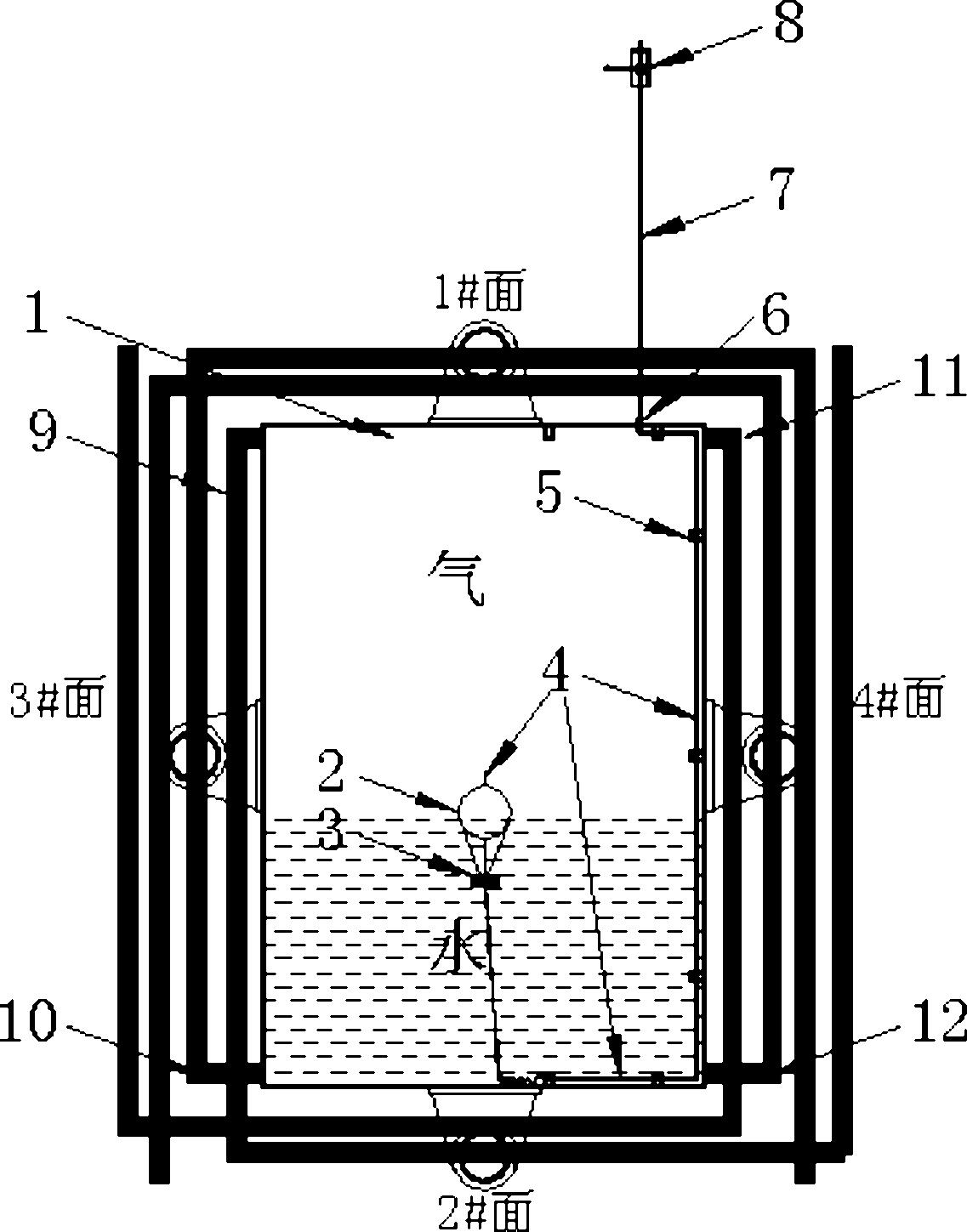
图8(a)为双目立体全景视觉传感器的设计图、图8(b)为双目立体全景视觉传感器的球面计算模型、图8(c)为体结构式的、固定单一视点的双目立体全景视觉传感器的模型;
图9为无死角的ODVS成像原理图,其中,29为摄像头,30为一次折反射镜面,31为保护罩,32为SVP,33为第一成像点,34为二次折反射镜面,35为广角镜头;
图10为全景立体视觉传感器的测距和捕捞对象空间定位原理图;
图11为观察点到捕捞点之间空间定位精度的实验曲线;
图12为一种仿生海底生物捕捞机器人中的智能体的功能模块以及各功能相互之间的关系图。
具体实施方式
下面结合附图对本发明作进一步描述。
参照图1~图12,一种仿生海底生物捕捞机器人,包括外部形状类似于海龟的捕捞机器人的本体,基于人工肌肉的具有海底行走和捕捞海底生物两种功能的四肢,用于感知水深的压力传感器,用于检测捕捞机器人行走方向的数字罗盘,用于获取捕捞机器人周边360°的全景立体视觉视频图像的双目立体全景视觉传感器和用于控制四肢协调海底行走、对捕捞对象的识别和空间定位、自主导航、控制捕捞动作以及与水面母船进行信息交互的智能体,以下简称Agent,与水面母船进行通信和能源设备提供设备连接的脐带;
所述的捕捞机器人本体,外形非常类似于海龟,底部平坦,背部隆起,俯视呈现椭圆形,如附图1所示;所述的捕捞机器人本体内部分隔成为三个空间,一个空间为收集舱,位于本体的底部,用于存放捕捞对象;一个空间为控制设备仪器仪表舱,位于本体的背部,控制设备仪器仪表舱中安装着所述的智能体、其他控制仪器仪表以及备用电源,所述的脐带接入到控制设备仪器仪表舱内与所述的智能体通信接口和备用电源进行连接;所述的双目立体全景视觉传感器,自带有为捕捞机器人提供照明的环形LED光源,固定在所述的捕捞机器人本体的背部上,用于获取仿生海底生物捕捞机器人周边的全景立体视觉视频图像,接入到控制设备仪器仪表舱内与所述的智能体的USB接口进行连接;所述的压力传感器,固定在所述的捕捞机器人本体的背部上,接入到控制设备仪器仪表舱内与所述的智能体的A/D接口进行连接,用于检测所述的捕捞机器人本体所受到的海水压力,从而从压力值推算出所述的捕捞机器人本体所处的深度;所述的数字罗盘,安置在控制设备仪器仪表舱内,与所述的智能体的I/O接口进行连接,用于检测所述的捕捞机器人的行走方向,根据所述的捕捞机器人行走控制与行走方向得到所述的捕捞机器人在海底行走的轨迹;一个空间为浮力舱,位于收集舱和控制设备仪器仪表舱之间,主要用于控制所述的捕捞机器人行走时的稳定性以及升降;
所述的浮力舱上开有两个口,一个口用电磁阀控制其开和闭,当开的状态时浮力舱与外界相通,当闭的状态时浮力舱与外界隔绝;另一个口与水泵输入口连接,水泵工作时将浮力舱的海水抽出,在浮力舱中形成一定的真空,使得捕捞机器人上浮;因此当要控制捕捞机器人的下降时,控制电磁阀开让海水进入所述的浮力舱;当要控制捕捞机器人的上升时,控制电磁阀关闭然后使水泵工作让所述的浮力舱中的海水抽出,使得捕捞机器人具有向上的浮力;
所述的四肢的一端固定在所述的捕捞机器人本体的收集舱两侧前后,非常类似于海龟的四肢,由人工肌肉制成;所述的四肢的外形呈管三自由度肌肉状,管内分隔成三个互成120°的扇形柱状空腔,通过分别控制三个空腔的水压力来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲,实现三个自由度的控制;在所述的捕捞机器人行走时,所述的四肢支撑着所述的捕捞机器人本体,如附图4所示;在所述的捕捞机器人进行捕捞时,所述的四肢的前端对准捕捞对象实现对准捕捞对象吸入捕捞;在所述的四肢中设置有捕捞管道,以下简称基于人工肌肉的捕捞管道,当所述的四肢的前端对准捕捞对象时所述的捕捞管道中产生脉冲式负压,将捕捞对象吸入到所述的捕捞管道中,然后随着所述的捕捞管道进入到所述的捕捞舱内,如附图5所示;因此,所述的四肢有两个功能,一个功能是实现捕捞机器人在海底的行走,另一个功能是实现捕捞对象吸入捕捞;为了从功能方面进行区分,本发明将用于行走功能的定义为基于人工肌肉的四肢,将用于捕捞功能的定义为基于人工肌肉的捕捞管道;
所述的收集舱在安装所述的四肢的部位配置有四个口,四个口的开关均由四个收集舱电磁阀控制,收集舱电磁阀处于开的状态时所述的捕捞管道与所述的收集舱是相通的;在所述的捕捞机器人行走时或者升降时,收集舱电磁阀处于关闭状态,这样能保证捕捞对象不会倒流到海中,同时也实现了对捕捞对象的保压;只有当所述的四肢的前端对准捕捞对象时,收集舱电磁阀处于开启状态;所述的收集舱固定在所述的捕捞机器人本体的底部,所述的捕捞机器人本体的底部与本体是可分离的;当所述的捕捞机器人完成捕捞作业后浮到海面上并收回到母船时,作业人员将所述的捕捞机器人本体的底部从本体上卸下,用空的收集舱更换盛满了捕捞对象的收集舱,重新将所述的捕捞机器人本体的底部连接到本体上,然后将所述的捕捞机器人放入海中继续进行捕捞;由于盛满了捕捞对象的收集舱的电磁阀处于关闭状态,所以收集舱仍然处于保压状态,收集舱的捕捞对象保持着海底生存时的压力,有利于提高所捕获生物的存活率;
所述的脐带主要由单模光纤线和电芯线构成,采用单模光纤线主要是为了满足传输3000米左右的信息需要;电芯线和单模光缆线均为单内涂层;这些线的外面模压或填充柔软而耐用的模压树脂或纤维,所述的脐带的外表面履盖耐磨材料层;把镀锡铜线用作电芯线;把聚乙烯或聚丙烯用作电芯线的内涂层的材料;把凯夫拉纤维或碳树脂用作模压树脂,把聚乙烯或聚丙烯用作耐磨外涂层的材料;把特氛隆用作单模光纤线的内涂层的材料;单模光纤线为水面母船与智能体之间提供信息交互的通道,电芯线为所述的捕捞机器人提供电源;
控制四肢的三个自由度动作装置的包括:用于通入所述的四肢中捕捞管道内空腔的压力发生器,用于对通入各捕捞管道内空腔的压力进行控制的压力比例控制阀,用于对通入各捕捞管道内空腔的压力进行检测的压力传感器,用于对各压力比例控制阀进行协调控制的压力比例控制器,用于吸入捕捞对象的脉冲式负压发生模块,用于控制执行捕捞动作的捕捞控制模块,用于控制行走动作的行走控制模块;
所述的行走控制模块,从属于Agent,用以控制所述的基于人工肌肉的四肢完成三个自由度的协调动作,使得所述的捕捞机器人实现向前、向后、向左和向右的移动;
所述的捕捞控制模块,从属于Agent,用以控制所述的基于人工肌肉的捕捞管道的三个自由度的动作,使得捕捞口对准捕捞对象;当捕捞口对准捕捞对象时控制所述的脉冲式负压发生模块动作产生脉冲式负压将捕捞对象吸入到捕捞管道中;
所述的Agent还包括全景立体图像获取单元、自主导航模块和智能视频分析模块、与母船信息交互模块,任务规划行为模块;
所述的全景立体图像获取单元,用于获取初始化信息和全景立体视频图像;
所述的自主导航模块,用于从所述的双目立体全景视觉传感器获取的全景立体视觉视频图像,解析仿生海底生物捕捞机器人周围的地域环境,完成路径规划和避障任务;
所述的智能视频分析模块,用于从所述的双目立体全景视觉传感器获取的全景立体视觉视频图像,从全景立体视觉视频图像中解析出捕捞对象、捕捞对象大小以及所处的空间位置,为针对性的捕捞提供捕捞口的空间位置信息;
所述的与母船信息交互模块,用于将所述的捕捞机器人周围的全景立体视频图像传输给母船、接受从母船发出的控制指令;包括以下交互行为:1)请求干预的交互行为,当捕捞机器人发生紧急事件、捕捞机器人的收集舱已满等情况时,请求捕捞管理人员干预;2)接受捕捞调度指令的交互行为,当捕捞管理人员下达捕捞任务后,将捕捞任务转达给所述的任务规划行为模块,在所述的任务规划行为模块做出遍历路径规划后,将遍历路径规划反馈给母船上的管理人员;3)协商的交互行为,根据所述的Agent根据自身感知的情况,通过对自身知识的推理,能向母船上的管理人员提供适当的帮助和建议;4)提供捕捞现场信息的交互行为,负责响应来自捕捞管理人员的上传信息指令,将所述的Agent所感知到的全景视频信息、捕捞机器人的行走方向和深度信息和分析得到的状态信息上传给捕捞管理人员;
进一步,所述的基于人工肌肉的捕捞管道,所述捕捞管道的外形呈管三自由度肌肉状,管内分隔成三个互成120°的扇形柱状空腔,如附图1所示;通过分别控制三个空腔的压力来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲,实现三个自由度的控制;在所述的基于人工肌肉的捕捞管道的内外管壁的橡胶基体中,夹有芳香族聚酰胺增强纤维,纤维走向与肌肉的轴向有一夹角α,考虑到所述的基于人工肌肉的捕捞管道的柔软性,将夹角α设计为70°~80°;这样由于纤维单方向增强效果的影响,沿垂直于纤维方向的变形比沿纤维方向变形容易得多;
将所述的基于人工肌肉的捕捞管道分成若干个部件,包括管道终端、管道终端密封体、管道本体、管道连接密封体、管道连接法兰和通液管;其组装过程是:首先,将所述的管道终端密封体插入所述的管道本体的一端,接着将所述的管道终端盖住所述的管道终端密封体并用自攻螺钉将所述的管道终端密封体和所述的管道本体的一端固定在一起;将所述的管道连接密封体插入所述的管道本体的另一端,接着将所述的管道连接法兰的三个孔对准所述的管道连接密封体的三个孔并盖住,然后将所述的管道连接密封体和所述的管道本体的另一端固定连接在一起,最后将三根通液管分别插入所述的管道连接法兰的三个孔中;组装后的所述的基于人工肌肉的捕捞管道中的捕捞通道是上下连通的;捕捞通道与捕捞舱连通;所述的基于人工肌肉的捕捞管道中的三个空腔只与三根通液管分别对应连通,空腔与外界保持密封状态;通过所述的管道连接法兰与所述的捕捞机器人的本体连接;所述的基于人工肌肉的捕捞管道终端的入口成喇叭型,如附图6所示;
所述的基于人工肌肉的捕捞管道的捕捞通道根据不同的捕捞对象大小进行设计,并考虑能有效支撑捕捞通道中的最小口径略大于捕捞对象的最大直径,最小口径φrmin设计计算方法用公式(1)表示,
40mm>φrmin-φomax≥20mm (1)
式中,φrmin为捕捞通道的最小口径、φomax为捕捞对象的最大直径;
所述的脉冲式负压发生模块,用于发出一种脉冲式真空液流实现对捕捞对象的负压吸取捕捞,然后通过所述的基于人工肌肉的捕捞管道吸入捕捞对象,并顺着捕捞管道将捕捞对象收集到捕捞对象收集舱中,其作用类似于机器手的手指,与机器手配合完成整个捕捞动作;所述的脉冲式负压发生模块包括二位三通阀、高压水源和喷嘴,所述的高压水源通过管道经所述的二位三通阀与所述的喷嘴进行连接,所述的喷嘴方向朝着捕捞对象收集舱,当所述的二位三通阀通电时所述的高压水源为所述的喷嘴提供高压液体,根据引射原理,这时在捕捞管道中形成真空负压;通过控制所述的二位三通液压阀的开与关,在捕捞管道中产生一种脉冲式真空液流;
所述的捕捞控制模块,需要将所述的双目立体全景视觉传感器及智能视频分析模块识别和定位后的捕捞对象的空间位置与所述的捕捞控制模块控制的捕捞口对准捕捞对象空间位置之间建立映射关系;这里将所述的双目立体全景视觉传感器中的下面一个全景视觉传感器的视点作为视觉坐标系的原点,并建立Xv、Yv和Zv构成的三维全景视觉坐标系;将所述的基于人工肌肉的捕捞管道与捕捞机器人的行走部分固定处的中心作为捕捞机械手的坐标原点,并建立Xa、Ya和Za构成的三维机械手运动坐标系;由于双目立体全景视觉传感器和基于人工肌肉的捕捞管道均固定在捕捞机器人的行走部分的上面,因此,用公式(2)建立三维全景视觉坐标系和三维捕捞机械手运动坐标系的几何关系;
式中,Xa、Ya和Za分别表示三维捕捞机械手运动坐标系,Xv、Yv和Zv分别表示三维全景视觉坐标系,x、y和z分别表示两个坐标系原点之间在三维坐标上的投影距离。
所述的捕捞控制模块,采用分别控制所述的基于人工肌肉的捕捞管道中的三个空腔的压力(p1,p2,p3)来实现沿中心轴Z方向的伸缩及任意一个方向的弯曲;对于每一组控制压力值(p1,p2,p3)在所述的基于人工肌肉的捕捞管道的捕捞端都会有相应的空间位置坐标值(xa,ya,za);因此,通过实验方法来建立所述的基于人工肌肉的捕捞管道中的三个空腔的压力值(p1,p2,p3)与所述的基于人工肌肉的捕捞管道的捕捞端的空间位置坐标值(xa,ya,za)的对应关系,我们将这个过程称为标定过程;通过标定建立这样的映射关系后,对于某一个希望的所述的基于人工肌肉的捕捞管道的捕捞端的空间位置坐标值(xa,ya,za)就能方便地计算得到所需要的一组所述的基于人工肌肉的捕捞管道的三个空腔的控制压力值(p1,p2,p3);由于用实验方法建立的映射关系是离散的,而空间位置坐标值(xa,ya,za)和空腔的控制压力值(p1,p2,p3)是连续的变量,因此在计算所需要的一组控制压力值(p1,p2,p3)时需要采用插值的方式,这里将所述的基于人工肌肉的捕捞管道的捕捞端的空间位置划分为若干个空间网格,如果某一个希望的所述的基于人工肌肉的捕捞管道的前端的空间位置坐标值并不处在某个空间网格的中心,那么就需要对该空间位置坐标值所处的空间网格以及三个相邻的空间网格进行插值运算,得到三个空腔的准确控制压力值;或者采用神经网络技术来实现空间位置坐标值(xa,ya,za)和空腔的控制压力值(p1,p2,p3)的映射关系。
所述的基于人工肌肉的捕捞管道,沿中心轴Z方向的伸缩及任意一个方向的弯曲控制采用液压比例压力控制技术来实现;高压水源通过三个比例压力阀分别与所述的基于人工肌肉的捕捞管道的三个空腔连接,用三个压力传感器检测所述的基于人工肌肉的捕捞管道的三个空腔内的液体压力,压力传感器通过A/D转换器与计算和控制设备相连,计算和控制设备通过D/A和功率放大器与比例压力阀相连;当计算得到某一空腔的控制压力后,计算和控制设备通过D/A输出一个电压量控制比例压力阀的开口大小,以调节空腔内的液体压力,同时压力传感器检测该空腔内的液体压力,如果空腔内的液体压力恒定在期望控制压力范围内时控制比例压力阀关闭以保持空腔内的液体压力在期望值内;因此,所述的基于人工肌肉的捕捞管道的控制将分解为三个空腔内液体压力的比例控制。
所述的捕捞控制模块,当所述的基于人工肌肉的捕捞管道的捕捞端对准捕捞对象时,所述的Agent通过I/O接口触发所述的脉冲式负压发生模块,发出一种脉冲式负压实现对捕捞对象的负压吸取捕捞,捕捞对象顺着所述的基于人工肌肉的捕捞管道将捕捞对象收集到所述的捕捞对象收集舱中。
关于用于捕捞对象的识别和定位的双目立体全景视觉传感器及智能视频分析模块,用于完成路径规划和避障任务的双目立体全景视觉传感器及自主导航模块,各仿生海底生物捕捞机器人与母船之间的人机协同作业的等技术方案将在今后的其他专利文件中进行披露。
一种仿生海底生物捕捞机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0