








专利摘要
本发明公开了一种剪叉弯曲变胞机构机械手,每个机械手爪包括串联连接的多个变胞机构单元,每个变胞机构单元包括并联连接的多个子变胞机构单元,每个子变胞机构单元包括一个剪叉机构和一个变体剪叉机构,上述剪叉弯曲变胞机构机械手由桁架杆件组成,与传统的关节式机械手相比,质量小,结构刚度高,折叠体积小、折展比大,有利于节省运输尺寸,平面结构简单,自由度少,驱动简单,通过较少的驱动就能使机械手爪实现大范围的运动;并且,机械手爪是先进行直线展开,展开到位后再进行弯曲抓取,因此,可以对目标进行大尺度包络抓取,这样,既可以节省机械手爪的伸展空间,又能避免机械手爪与抓捕目标之间产生干涉,从而更有利于捕获目标物体。
权利要求
1.一种剪叉弯曲变胞机构机械手,其特征在于,包括:安装平台、安装于所述安装平台上的多个机械手爪以及与各所述机械手爪一一对应连接用于驱动对应的机械手爪运动的驱动单元;其中,
每个所述机械手爪包括沿折展方向首尾相接的多个变胞机构单元;每个所述变胞机构单元包括第一连接杆、第二连接杆以及通过所述第一连接杆和所述第二连接杆连接的多个子变胞机构单元;
每个所述子变胞机构单元,包括:第一剪叉杆、第二剪叉杆、第三剪叉杆、第四剪叉杆、连接销、上限位连杆以及下限位连杆;其中,
所述第一剪叉杆和所述第二剪叉杆在位于中间部位的第一安装孔处通过转动副互相连接,形成一个剪叉机构;
所述连接销一端的顶部为槽口型圆柱,底部为完整圆柱;另一端的顶部为完整圆柱,底部为两侧锪平的圆柱;中间为带有倒圆的正方体;
所述第三剪叉杆带有滑槽和缺口直槽口,所述第四剪叉杆中间为带有倒圆的方孔,所述第三剪叉杆与所述连接销底部为两侧锪平的圆柱的一端配合,所述第四剪叉杆与所述连接销带有倒圆的正方体配合固定连接,所述第三剪叉杆和所述第四剪叉杆连接形成一组变体剪叉机构;
所述剪叉机构的末端与所述变体剪叉机构的顶端通过转动副互相连接;
所述上限位连杆一端与所述第二剪叉杆在位于所述第二剪叉杆末端与所述第一安装孔之间的第二安装孔处通过转动副互相连接,所述下限位连杆槽口一端与所述连接销顶部为槽口型圆柱的一端连接,所述上限位连杆的另一端与所述下限位连杆的另一端通过转动副互相连接;
当所述子变胞机构单元从折叠状态开始伸展运动时,所述连接销底部为两侧锪平的圆柱的一端被限制在所述第三剪叉杆缺口直槽口中,所述变胞机构单元做剪叉运动,当运动至所述上限位连杆与所述下限位连杆共线时,所述连接销底部为两侧锪平的圆柱的一端从所述第三剪叉杆缺口直槽口脱离,所述连接销沿着所述第三剪叉杆滑槽方向运动,所述变胞机构单元做弯曲运动,所述上限位连杆与所述下限位连杆保持共线直至所述变胞机构单元运动至极限位置;
当所述子变胞机构单元从弯曲状态反向折叠运动至所述连接销底部为两侧锪平的圆柱的一端与所述第三剪叉杆带有的缺口直槽口共轴后,所述连接销槽口推动所述下限位连杆槽口使得所述上限位连杆与所述下限位连杆不再共线,所述变胞机构单元继续以剪叉运动形式运动。
2.如权利要求1所述的剪叉弯曲变胞机构机械手,其特征在于,所述下限位连杆具有一伸出支,所述伸出支上安装有磁铁,所述上限位连杆在所述上限位连杆与所述下限位连杆共线时与所述磁铁接触位置上安装有铁片,用于保持所述上限位连杆与所述下限位连杆共线。
3.如权利要求1或2所述的剪叉弯曲变胞机构机械手,其特征在于,所述机械手爪安装在所述安装平台的两侧。
4.如权利要求1或2所述的剪叉弯曲变胞机构机械手,其特征在于,各所述驱动单元通过第三安装孔与所述安装平台连接。
5.如权利要求1或2所述的剪叉弯曲变胞机构机械手,其特征在于,所述安装平台由板材拼接而成。
说明书
技术领域
本发明涉及空间目标抓捕机械手技术领域,尤其涉及一种剪叉弯曲变胞机构机械手。
背景技术
太空中遗留有大量的火箭箭体、卫星本体及飞行器碎片等物体,这些物体在太空轨道中运行具有很大的不确定性,对在役卫星、宇航员等有很大的威胁。随着航空技术的进步,人类也开始进行卫星回收、小行星捕获等工作,这些工作都需要用到空间抓捕机械手。由于火箭具有有限的运力和体积,因此,空间抓捕机械手需要具有较大的展缩比以实现较小的折叠体积,并且,空间抓捕机械手需要具有较少的自由度,这样,通过较少的驱动就可以使空间抓捕机械手实现大范围的运动。
传统的空间抓捕机械手大多为关节式机械手。关节式机械手质量大,展开体积小,抓捕目标基本只能为合作目标,并且,其抓取尺度小,不能完成对目标的包络抓取,此外,其一般为多自由度,需要精确的控制方案和运动规划。
并且,传统的空间抓捕机械手的设计模式较为单一,虽然能够满足折叠体积小的特点,但其展开过程与对物体的抓取过程往往同时进行,这样,不仅会浪费一部分伸展空间,空间抓捕机械手与抓捕目标之间还可能产生干涉问题。
因此,设计一种折展比大,自由度少,结构简单可靠,可实现大尺度目标抓取的空间抓捕机械手,是需要解决的问题。
发明内容
有鉴于此,本发明提供了一种剪叉弯曲变胞机构机械手,用以设计一种折展比大,自由度少,结构简单可靠,可实现大尺度目标抓取的空间抓捕机械手。
因此,本发明提供了一种剪叉弯曲变胞机构机械手,包括:安装平台、安装于所述安装平台上的多个机械手爪以及与各所述机械手爪一一对应连接用于驱动对应的机械手爪运动的驱动单元;其中,
每个所述机械手爪包括沿折展方向首尾相接的多个变胞机构单元;每个所述变胞机构单元包括第一连接杆、第二连接杆以及通过所述第一连接杆和所述第二连接杆连接的多个子变胞机构单元;
每个所述子变胞机构单元,包括:第一剪叉杆、第二剪叉杆、第三剪叉杆、第四剪叉杆、连接销、上限位连杆以及下限位连杆;其中,
所述第一剪叉杆和所述第二剪叉杆在位于中间部位的第一安装孔处通过转动副互相连接,形成一个剪叉机构;
所述连接销一端的顶部为槽口型圆柱,底部为完整圆柱;另一端的顶部为完整圆柱,底部为两侧锪平的圆柱;中间为带有倒圆的正方体;
所述第三剪叉杆带有滑槽和缺口直槽口,所述第四剪叉杆中间为带有倒圆的方孔,所述第三剪叉杆与所述连接销底部为两侧锪平的圆柱的一端配合,所述第四剪叉杆与所述连接销带有倒圆的正方体配合固定连接,所述第三剪叉杆和所述第四剪叉杆连接形成一组变体剪叉机构;
所述剪叉机构的末端与所述变体剪叉机构的顶端通过转动副互相连接;
所述上限位连杆一端与所述第二剪叉杆在位于所述第二剪叉杆末端与所述第一安装孔之间的第二安装孔处通过转动副互相连接,所述下限位连杆槽口一端与所述连接销顶部为槽口型圆柱的一端连接,所述上限位连杆的另一端与所述下限位连杆的另一端通过转动副互相连接;
当所述子变胞机构单元从折叠状态开始伸展运动时,所述连接销底部为两侧锪平的圆柱的一端被限制在所述第三剪叉杆缺口直槽口中,所述变胞机构单元做剪叉运动,当运动至所述上限位连杆与所述下限位连杆共线时,所述连接销底部为两侧锪平的圆柱的一端从所述第三剪叉杆缺口直槽口脱离,所述连接销沿着所述第三剪叉杆滑槽方向运动,所述变胞机构单元做弯曲运动,所述上限位连杆与所述下限位连杆保持共线直至所述变胞机构单元运动至极限位置;
当所述子变胞机构单元从弯曲状态反向折叠运动至所述连接销底部为两侧锪平的圆柱的一端与所述第三剪叉杆带有的缺口直槽口共轴后,所述连接销槽口推动所述下限位连杆槽口使得所述上限位连杆与所述下限位连杆不再共线,所述变胞机构单元继续以剪叉运动形式运动。
在一种可能的实现方式中,在本发明提供的上述剪叉弯曲变胞机构机械手中,所述下限位连杆具有一伸出支,所述伸出支上安装有磁铁,所述上限位连杆在所述上限位连杆与所述下限位连杆共线时与所述磁铁接触位置上安装有铁片,用于保持所述上限位连杆与所述下限位连杆共线。
在一种可能的实现方式中,在本发明提供的上述剪叉弯曲变胞机构机械手中,所述机械手爪安装在所述安装平台的两侧。
在一种可能的实现方式中,在本发明提供的上述剪叉弯曲变胞机构机械手中,各所述驱动单元通过第三安装孔与所述安装平台连接。
在一种可能的实现方式中,在本发明提供的上述剪叉弯曲变胞机构机械手中,所述安装平台由板材拼接而成。
本发明提供的上述剪叉弯曲变胞机构机械手,每个机械手爪包括串联连接的多个变胞机构单元,每个变胞机构单元包括并联连接的多个子变胞机构单元,每个子变胞机构单元包括一个剪叉机构和一个变体剪叉机构,上述剪叉弯曲变胞机构机械手由桁架杆件组成,与传统的关节式机械手相比,质量小,结构刚度高,折叠体积小、折展比大,有利于节省运输尺寸,平面结构简单,自由度少,驱动简单,通过较少的驱动就能使机械手爪实现大范围的运动;并且,机械手爪是先进行直线展开,展开到位后再进行弯曲抓取,因此,上述剪叉弯曲变胞机构机械手可以对目标进行大尺度包络抓取,这样,既可以节省机械手爪的伸展空间,又能避免机械手爪与抓捕目标之间产生干涉,从而更有利于捕获目标物体;此外,变胞机构单元之间可以通过多级串联的方式增大机械手的包络面积,子变胞机构单元之间可以通过多级并联的方式提高机械手的结构刚度,还可以通过调整上限位连杆和下限位连杆的长度以及连接销的形状来调整机械手的包络形状,在不改变其他杆件的情况下对机械手的包络形状进行快速调整。
附图说明
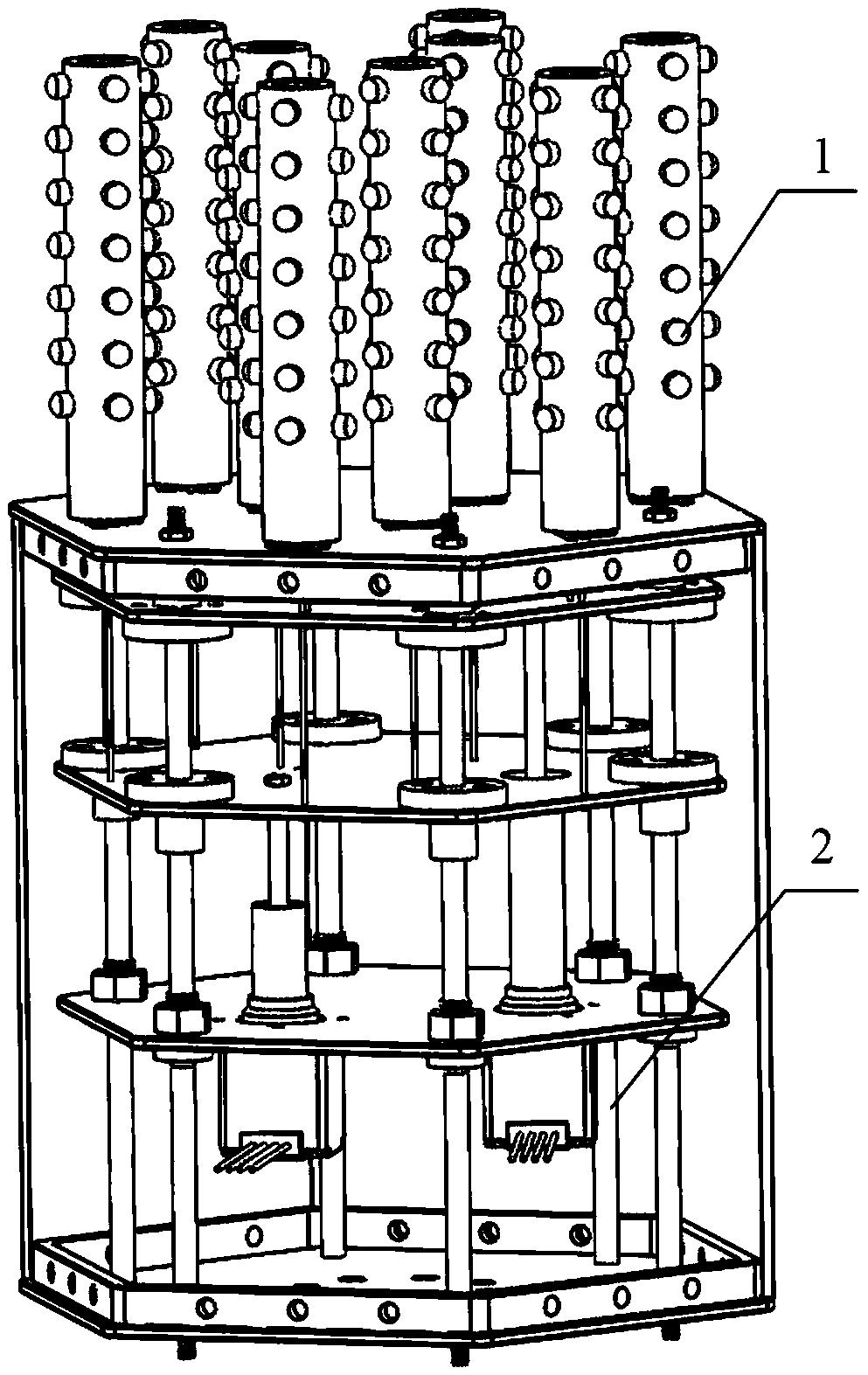
图1为本发明实施例提供的剪叉弯曲变胞机构机械手的三维图;
图2为本发明实施例提供的剪叉弯曲变胞机构机械手的机械手爪的三维图;
图3为本发明实施例提供的剪叉弯曲变胞机构机械手的变胞机构单元的三维图;
图4为本发明实施例提供的剪叉弯曲变胞机构机械手的变胞机构单元拆分为两个子变胞机构单元后的三维图;
图5和图6分别为本发明实施例提供的剪叉弯曲变胞机构机械手的连接销的三维图;
图7为图4中A处的放大图;
图8为图4中B处的放大图;
图9为本发明实施例提供的剪叉弯曲变胞机构机械手的变胞机构单元的折叠状态图;
图10为本发明实施例提供的剪叉弯曲变胞机构机械手的变胞机构单元的正视图;
图11为图10中C处的剖视图;
图12为本发明实施例提供的剪叉弯曲变胞机构机械手的变胞机构单元的过渡状态图;
图13为本发明实施例提供的剪叉弯曲变胞机构机械手的变胞机构单元的弯曲状态图;
图14为本发明实施例提供的剪叉弯曲变胞机构机械手的折叠状态图;
图15为本发明实施例提供的剪叉弯曲变胞机构机械手的伸展状态图;
图16为本发明实施例提供的剪叉弯曲变胞机构机械手的抓取状态图;
图17为图10中D处的放大图。
具体实施方式
下面将结合本申请实施方式中的附图,对本申请实施方式中的技术方案进行清楚、完整的描述,显然,所描述的实施方式仅仅是作为例示,并非用于限制本申请。
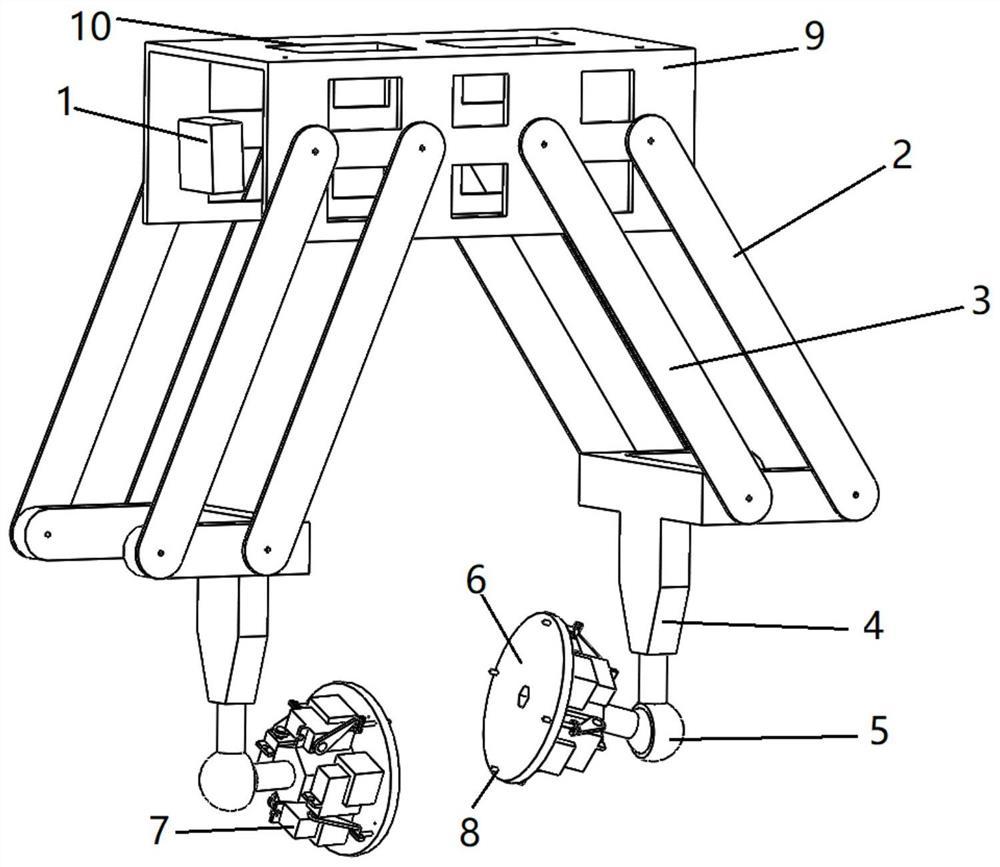
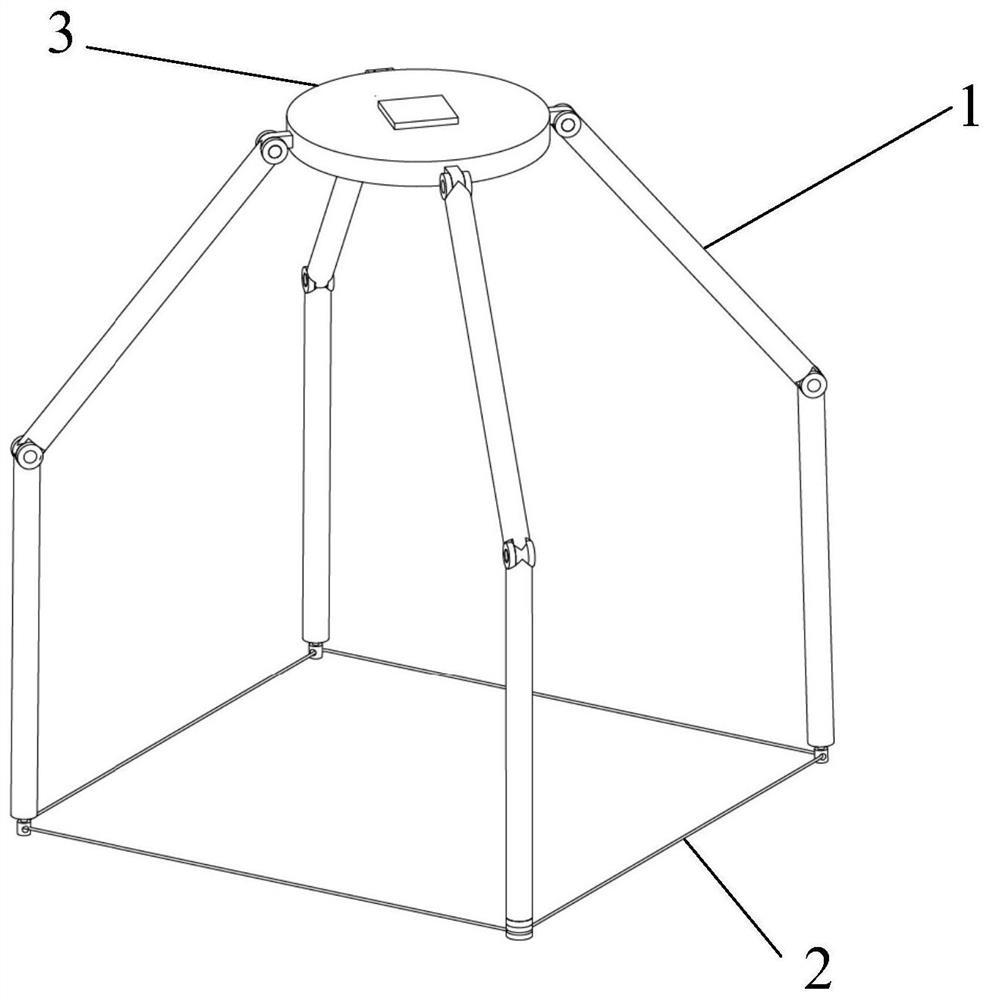
本发明实施例提供的一种剪叉弯曲变胞机构机械手,如图1所示,包括:安装平台1、安装于安装平台1上的多个机械手爪2以及与各机械手爪2一一对应连接用于驱动对应的机械手爪2运动的驱动单元3;其中,
如图2所示,每个机械手爪2包括沿折展方向首尾相接(即串联方式连接)的多个变胞机构单元4,图2以机械手爪2包括两个变胞机构单元4为例进行说明;每个变胞机构单元4,如图3所示,包括第一连接杆5、第二连接杆6以及通过第一连接杆5和第二连接杆6以并联方式连接的多个子变胞机构单元7,图3以两个子变胞机构单元7并联连接为例进行说明;
每个子变胞机构单元7,如图4所示,包括:第一剪叉杆8、第二剪叉杆9、第三剪叉杆10、第四剪叉杆11、连接销12、上限位连杆13以及下限位连杆14;其中,
第一剪叉杆8和第二剪叉杆9在位于中间部位的第一安装孔15处通过转动副互相连接,形成一个剪叉机构;
如图5所示,连接销12一端(如图5所示的a端)的顶部为槽口型圆柱,底部为完整圆柱;如图6所示,连接销12另一端(如图6所示的b端)的顶部为完整圆柱,底部为两侧锪平的圆柱;中间为带有倒圆的正方体;需要说明的是,顶部为远离中间为带有倒圆的正方体的部分,底部为靠近中间为带有倒圆的正方体的部分;
第三剪叉杆10带有滑槽和缺口直槽口,第四剪叉杆11中间为带有倒圆的方孔,第三剪叉杆10与连接销12底部为两侧锪平的圆柱的一端配合,如图4所示的A部分,其放大图如图7所示,第四剪叉杆11与连接销12带有倒圆的正方体配合固定连接,第三剪叉杆10和第四剪叉杆11连接形成一组变体剪叉机构;
剪叉机构的末端与变体剪叉机构的顶端通过转动副互相连接;
上限位连杆13一端与第二剪叉杆9在位于第二剪叉杆9末端与第一安装孔15之间的第二安装孔16处通过转动副互相连接,例如,如图4所示,第二安装孔16位于第二剪叉杆9距末端四分之一处;如图4所示的B部分,其放大图如图8所示,下限位连杆14槽口一端与连接销12顶部为槽口型圆柱的一端连接,上限位连杆13的另一端与下限位连杆14的另一端通过转动副互相连接;
当子变胞机构单元7从如图9所示的折叠状态开始伸展运动时,如图8所示,下限位连杆14槽口与连接销12槽口具有一定的角度差,如图10和图11所示,图11为图10中C处的剖视图,连接销12底部为两侧锪平的圆柱的一端被限制在第三剪叉杆10缺口直槽口中,变胞机构单元4做剪叉运动,当运动至如图12所示的上限位连杆13与下限位连杆14共线时,连接销12底部为两侧锪平的圆柱的一端从第三剪叉杆10缺口直槽口脱离,此时,下限位连杆14槽口与连接销12槽口的角度差变为零,之后,连接销12与第三剪叉杆10形成的转动副变成滑转副,连接销12沿着第三剪叉杆10滑槽方向运动,变胞机构单元4做如图13所示的弯曲运动,上限位连杆13与下限位连杆14在此过程中一直保持共线直至变胞机构单元4运动至极限位置,此过程中下限位连杆14槽口与连接销12槽口角度差不断增大,因此,下限位连杆14与连接销12之间不会产生干涉;
当子变胞机构单元7从如图13所示的弯曲状态反向折叠运动至连接销12底部为两侧锪平的圆柱的一端与第三剪叉杆10带有的缺口直槽口共轴后,连接销12能够沿着第三剪叉杆10带有的缺口直槽口继续运动,连接销12的角速度将小于下限位连杆15的角速度,连接销12槽口推动下限位连杆14槽口使得上限位连杆13与下限位连杆14不再共线,连接销12与第三剪叉杆10形成的滑转副变回转动副,变胞机构单元4继续以剪叉运动形式运动。
本发明实施例提供的上述剪叉弯曲变胞机构机械手,如图1-图4所示,每个机械手爪2包括串联连接的多个变胞机构单元4,每个变胞机构单元4包括并联连接的多个子变胞机构单元7,每个子变胞机构单元7包括一个剪叉机构和一个变体剪叉机构,上述剪叉弯曲变胞机构机械手由桁架杆件组成,与传统的关节式机械手相比,质量小,结构刚度高,折叠体积小、折展比大,有利于节省运输尺寸,平面结构简单,自由度少,驱动简单,通过较少的驱动就能使机械手爪2实现大范围的运动;并且,如图14-图16所示,机械手爪2是先进行直线展开,展开到位后再进行弯曲抓取,因此,上述剪叉弯曲变胞机构机械手可以实现对目标进行大尺度包络抓取,这样,既可以节省机械手爪2的伸展空间,又能避免机械手爪2与抓捕目标之间产生干涉,从而更有利于捕获目标物体;此外,变胞机构单元4之间可以通过多级串联的方式增大机械手的包络面积,子变胞机构单元7之间可以通过多级并联的方式提高机械手的结构刚度,还可以通过调整上限位连杆13和下限位连杆14的长度以及连接销12的形状来调整机械手的包络形状,在不改变其他杆件的情况下对机械手的包络形状进行快速调整。
需要说明的是,在本发明实施例提供的上述剪叉弯曲变胞机构机械手中,第三剪叉杆带有的缺口直槽口,相当于将缺口圆形槽口中缺口的对侧延长一段后的结构。
在具体实施时,在本发明实施例提供的上述剪叉弯曲变胞机构机械手中,如图12所示,上限位连杆13与下限位连杆14在连接销12从第三剪叉杆10缺口直槽口脱离时共线,此时,上限位连杆13和下限位连杆14视为一个连杆,子变胞机构单元7反向折叠运动至连接销12进入第三剪叉杆10缺口直槽口时上限位连杆13、下限位连杆14、第二剪叉杆9和第三剪叉杆10构成的铰链四杆机构形成死点,基于此,在本发明实施例提供的上述剪叉弯曲变胞机构机械手中,如图10所示的D部分,其放大图如图17所示,可以在下限位连杆14设置一伸出支17,在伸出支17上安装一磁铁18,在上限位连杆13在上限位连杆与下限位连杆14共线时与磁铁18接触位置上安装一铁片,这样,在上限位连杆13与下限位连杆14共线时,上限位连杆13上的铁片可以与伸出支17上的磁铁18吸附在一起,从而可以保持上限位连杆13与下限位连杆14共线,维持死点状态。
在具体实施时,在本发明实施例提供的上述剪叉弯曲变胞机构机械手中,如图1所示,可以将机械手爪2安装在安装平台1的两侧,这样,便于机械手对物体进行抓捕。较佳地,如图1所示,可以在安装平台1的一侧安装两个机械手爪2,在另一侧安装一个机械手爪2,这样,可以增大机械手爪2的抓合力,提高机械手抓捕物体的安全性和有效性。
在具体实施时,在本发明实施例提供的上述剪叉弯曲变胞机构机械手中,如图1所示,各驱动单元3可以通过第三安装孔与安装平台1连接,具体地,各驱动单元3可以通过第三安装孔安装在安装平台1的侧面,这样,可以将各驱动单元3固定于安装平台1上,提高机械手的结构稳定性。
在具体实施时,在本发明实施例提供的上述剪叉弯曲变胞机构机械手中,安装平台的作用主要是安装机械手爪,为机械手爪提供支撑的载体,因此,如图1所示,安装平台1可以由板材拼接而成;或者,安装平台也可以通过其他工艺一体成型,在此不做限定。
本发明实施例提供的上述剪叉弯曲变胞机构机械手,每个机械手爪包括串联连接的多个变胞机构单元,每个变胞机构单元包括并联连接的多个子变胞机构单元,每个子变胞机构单元包括一个剪叉机构和一个变体剪叉机构,上述剪叉弯曲变胞机构机械手由桁架杆件组成,与传统的关节式机械手相比,质量小,结构刚度高,折叠体积小、折展比大,有利于节省运输尺寸,平面结构简单,自由度少,驱动简单,通过较少的驱动就能使机械手爪实现大范围的运动;并且,机械手爪是先进行直线展开,展开到位后再进行弯曲抓取,因此,上述剪叉弯曲变胞机构机械手可以对目标进行大尺度包络抓取,这样,既可以节省机械手爪的伸展空间,又能避免机械手爪与抓捕目标之间产生干涉,从而将更有利于捕获目标物体;此外,变胞机构单元之间可以通过多级串联的方式增大机械手的包络面积,子变胞机构单元之间可以通过多级并联的方式提高机械手的结构刚度,还可以通过调整上限位连杆和下限位连杆的长度以及连接销的形状来调整机械手的包络形状,在不改变其他杆件的情况下对机械手的包络形状进行快速调整。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
一种剪叉弯曲变胞机构机械手专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0