








专利摘要
一种网飞爪装置组合体,包括抓捕网,抓铺网的几何中心设置有质量块,质量块与系留绳相连接,系留绳用于与航天器上的系留平台连接;在抓捕网的外围均匀设置有多个网爪。本发明的抓捕原理是利用抓捕网和网爪的惯性,本发明网飞爪装置组合体发射出去后,抓捕网快速展开,抓捕网与目标碰撞后,抓捕网上的网爪进行回抱运动,网爪能够与绳网纠结完成目标的捕获。进一步本发明利用布袋原理,通过收口绳设计了收口结构。抓捕网具有网型控制功能,较大增加了绳网的有效捕获距离和有效捕获时间,使得捕获飞船与目标距离增大,从而降低了对捕获飞船的轨道机动能力要求。本发明能够针对非合作目标实现准确、可靠、高效的在轨捕获。
权利要求
1.一种网飞爪装置组合体,包括抓捕网,其特征在于:抓捕网的几何中心设置有质量块,质量块与系留绳相连接,系留绳用于与航天器上的系留平台连接;在抓捕网的外围均匀设置有多个网爪,网爪通过牵引绳与抓捕网连接,牵引绳一端连接在抓捕网上,另一端连接网爪;网爪包括收线盒以及爪勾,所述收线盒上设置有爪勾;所述收线盒上设置有两个出线孔,收线盒内设有收口绳,收口绳的两端分别从两个出线孔穿出,其中收口绳的一端从一出线孔穿出后作为收口轴线绳,收口轴线绳用于与航天器上的系留平台连接;收口绳的另一端从另一出线孔穿出后作为收口边线绳顺着抓捕网的外围边线连接到相邻网爪对应的外围边线的边角上或者连接到相邻网爪连接的牵引绳上;抓捕网各外围边线均对应有一网爪的收口边线绳,通过外力收紧各网爪的收口轴线绳,对各外围边线上的收口边线绳进行收紧,抓捕网的各边角向其相邻的边角单向靠拢实现抓捕网的收口。
2.根据权利要求1所述的网飞爪装置组合体,其特征在于:抓捕网为正多边形或者圆形的绳网抓捕。
3.根据权利要求1所述的网飞爪装置组合体,其特征在于:抓捕网为正多边形的抓捕网,在抓捕网的各边角位置设置有牵引绳,网爪与牵引绳连接。
4.根据权利要求3所述的网飞爪装置组合体,其特征在于:抓捕网是菱形网目的正方形绳网;牵引绳是由抓捕网对角线延伸出来而形成的。
5.根据权利要求1所述的网飞爪装置组合体,其特征在于:在抓捕网的外围边线上均匀设置有供收口边线绳依次穿过的导向环。
6.根据权利要求1所述的网飞爪装置组合体,其特征在于:所述收线盒的底部设置有发射杆,发射杆固定在收线盒的底盖中心,牵引绳连接在发射杆上;两个出线孔对称分布在发射杆的两侧。
7.根据权利要求6所述的网飞爪装置组合体,其特征在于:所述收线盒的顶部设置有爪勾,爪勾固定在收线盒的顶盖的中心;所述爪勾包括中心杆以及分布在中心杆上的多个弯钩,中心杆从上至下分布有多层弯钩,每层弯钩包括呈十字形分布的四个弯钩。
8.根据权利要求1所述的网飞爪装置组合体,其特征在于:所述收线盒为圆筒形状的盒体;在收线盒内部设有收口绳传导机构。
9.根据权利要求8所述的网飞爪装置组合体,其特征在于:所述收口绳传导机构为设置在收线盒顶盖内壁上的一系列穿线孔,收线盒内部的收口绳呈Z字形折叠且依次穿过这一系列的穿线孔,每个穿线孔均作为收口绳的一个折叠点,每个折叠点两边的收口绳之间通过缝合的方式连接有定力撕裂带,收紧收口绳时,定力撕裂带两侧的收口绳在外力的作用下,定力撕裂带与收口绳之间缝合的针脚连续断裂,形成方向与外力相反的反向作用力。
说明书
技术领域
本发明涉及航天器抓捕装置技术领域,具体的涉及一种用于非合作目标在轨捕获的网飞爪装置组合体。
背景技术
航天器的抓捕与在轨服务是当前国际空间领域关注的热点,如何安全、准确、快捷地抓捕空间目标是未来空间技术发展面临的重大挑战。
目前,空间机器人自主在轨捕获技术已通过飞行试验演示验证,然而这些飞行试验中的捕获对象都为合作目标,即安装有用于测量的特征标识和机械臂抓持或对接的装置。而空间碎片都可归为非合作目标,非合作目标具有自旋、章动和逃逸等运动特性,其空间相对位置和运动信息难以得到实时的测量反馈,因此捕获难度较大。针对非合作目标的在轨捕获,仍然是目前航天工程中尚未解决的关键技术瓶颈。
发明内容
针对现有技术存在的缺陷,本发明提供一种网飞爪装置组合体,其可用于0.1m-10m的空间碎片等非合作目标的捕获。为了实现平动目标的捕获,要求抓捕系统在工作过程中能够对较大的空间区域进行覆盖,抓捕网完全展开时的最小边长至少为最大捕获目标尺寸的1.5倍;为了实现逃逸非合作目标的捕获,要求抓捕网成型迅速,且系统在与目标连线方向的捕获距离较长;为了实现自旋非合作目标的捕获,要求系统与捕获目标碰撞后能够快速形成统一体,防止出现脱落等非预想现象,同时能够便于后续的消旋等控制行为。
为实现本发明的技术目的,采用以下技术方案:
一种网飞爪装置组合体,包括抓捕网,抓捕网的几何中心设置有质量块,质量块与系留绳相连接,系留绳用于与航天器上的系留平台连接;在抓捕网的外围均匀设置有多个网爪。本发明的抓捕原理是利用抓捕网和网爪的惯性,本发明网飞爪装置组合体发射出去后,抓捕网快速展开,抓捕网与目标碰撞后,抓捕网上的网爪进行回抱运动,网爪能够与绳网纠结(即网爪与绳网勾挂在一起)完成目标的捕获。
作为本发明的优选技术方案,所述抓捕网为正多边形或者圆形的绳网,网爪通过牵引绳与抓捕网连接,牵引绳一端连接在抓捕网上,另一端连接网爪。对于是正多边形的抓捕网,在正多边形的抓捕网的各边角位置设置一个网爪即可。
进一步地,本发明的抓捕网可以采用菱形网目的正方形绳网,这种抓捕网的绳网网目不是与边线对齐,而是与对角线对齐。该绳网拓扑结构可以保证在将绳网收成束状后,四条边线上的绳节点到达绳网中心点的距离相等,有利于绳网的折叠封贮和绳网的有序展开。抓捕网的牵引绳是由抓捕网对角线延伸出来而形成的,在抓捕网的四角分别对应设置一个网爪,网爪分别连接在两对角线的两端即可。
进一步地,为了进一步的确保抓捕绳的绳网收口,本发明利用布袋原理,通过收口绳设计了如下结构的收口结构:网爪包括收线盒以及爪勾,所述收线盒上设置有爪勾。所述收线盒上设置有两个出线孔,收线盒内设有收口绳,收口绳的两端分别从两个出线孔穿出,其中收口绳的一端从一出线孔穿出后作为收口轴线绳,收口轴线绳用于与航天器上的系留平台连接;收口绳的另一端从另一出线孔穿出后作为收口边线绳顺着抓捕网的外围边线连接到相邻网爪对应的外围边线的边角上或者连接到相邻网爪连接的牵引绳上。为避免收口边线绳发生缠绕,在抓捕网的外围边线上均匀设置有供收口边线绳依次穿过的导向环。抓捕网各外围边线均对应有一网爪的收口边线绳,通过外力收紧各网爪的收口轴线绳,对各外围边线上的收口边线绳进行收紧,抓捕网的各边角向其相邻的边角单向靠拢实现抓捕网的收口。当抓捕网完成目标的捕获,开始收口时,通过外力收紧各网爪的收口轴线绳,实现各收口绳的收紧,使得抓捕网的各边角均向其相邻的边角单向靠拢,从而完成进一步收口,最终形成稳定的“绳-物”复合体。
本发明中,所述收线盒的底部设置有发射杆,发射杆固定在收线盒的底盖中心,牵引绳连接在发射杆上;两个出线孔对称分布在发射杆的两侧。所述收线盒的顶部设置有爪勾,爪勾固定在收线盒的顶盖的中心;所述爪勾包括中心杆以及分布在中心杆上的多个弯钩,中心杆从上至下分布有多层弯钩,每层弯钩包括呈十字形分布的四个弯钩。
进一步地,所述收线盒为圆筒形状的盒体;在收线盒内部设有收口绳传导机构;所述收口绳传导机构为设置在收线盒顶盖内壁上的一系列穿线孔,收线盒内部的收口绳呈Z字形折叠且依次穿过这一系列的穿线孔,每个穿线孔均作为收口绳的一个折叠点,每个折叠点两边的收口绳之间通过缝合的方式连接有定力撕裂带,收紧收口绳时,定力撕裂带两侧的收口绳在外力的作用下,定力撕裂带与收口绳之间缝合的针脚连续断裂,形成方向与外力相反的反向作用力。
本发明抓捕网所采用的绳网材料的选择主要考虑空间环境和任务要求。空间环境要求绳网材料具有耐高低温、抗强辐射、抗剪切、强绝缘性等特性。抓捕网由绳索交叉编织而成。由于在对目标进行捕获时,抓捕网的各对角线和抓捕网的各外围边线所承受的力较大,因此需要对抓捕网的各对角线和抓捕网的各外围边线进行加强加粗处理。
与现有技术相比,本发明能够产生以下技术效果:
本发明主要由抓捕网和飞爪组成,抓捕原理是利用绳网和飞爪的惯性,使得抓捕网与目标碰撞后,飞爪进行回抱运动,飞爪上的爪勾能够与绳网纠结完成目标的捕获。进一步地,本发明利用布袋原理,通过收口绳设计了收口结构,能够实现抓捕网外围边线的收拢,从而完成进一步收口,最终形成稳定的“绳-物”复合体。本发明能够针对非合作目标实现准确、可靠、高效的在轨捕获。
因为定力撕裂带的设计使得本发明的抓捕网具有网型控制功能。具体地,抓捕网展开到最大后会迅速回弹,究其原因是因为质量快牵引抓捕网展开后,网平面内的绳索还具有在网平面向外伸展的动能,然后由于绳索的弹性,使得绳索回弹,如果残余动能较大,则抓捕网会迅速回弹。定力撕裂带的作用就是将绳网平面内动能转变为定力断裂带断裂的内能,从而减弱甚至消除绳网的回弹运动。这样较大增加了绳网的有效捕获距离和有效捕获时间,使得捕获飞船与目标距离增大,从而降低了对捕获飞船的轨道机动能力要求。
附图说明
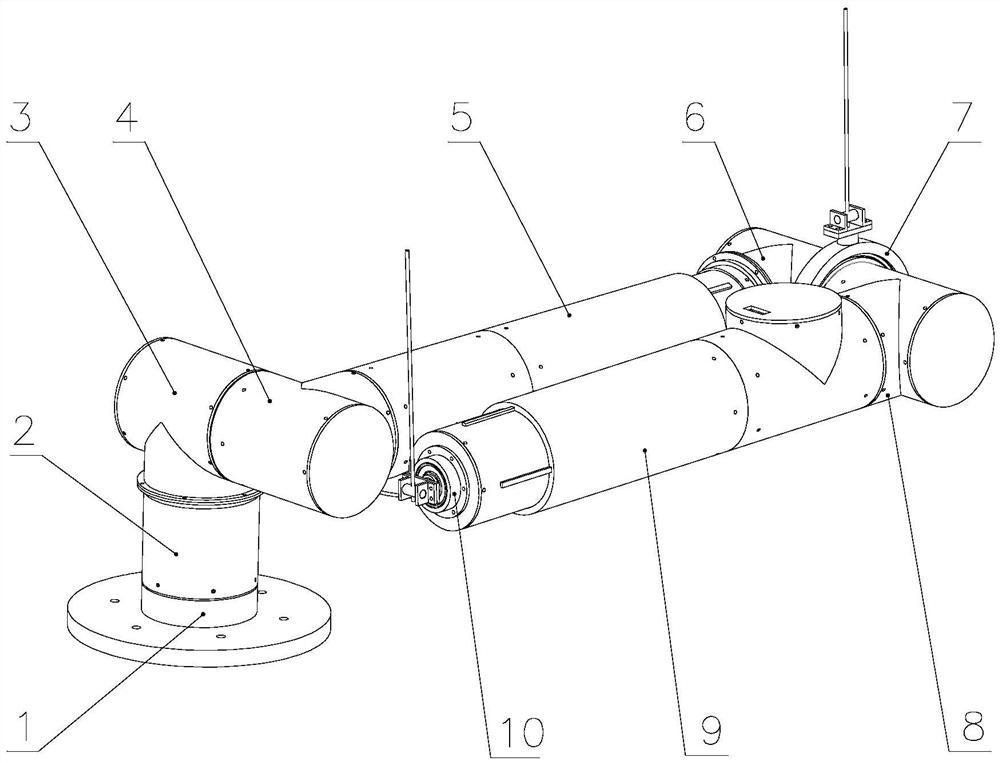
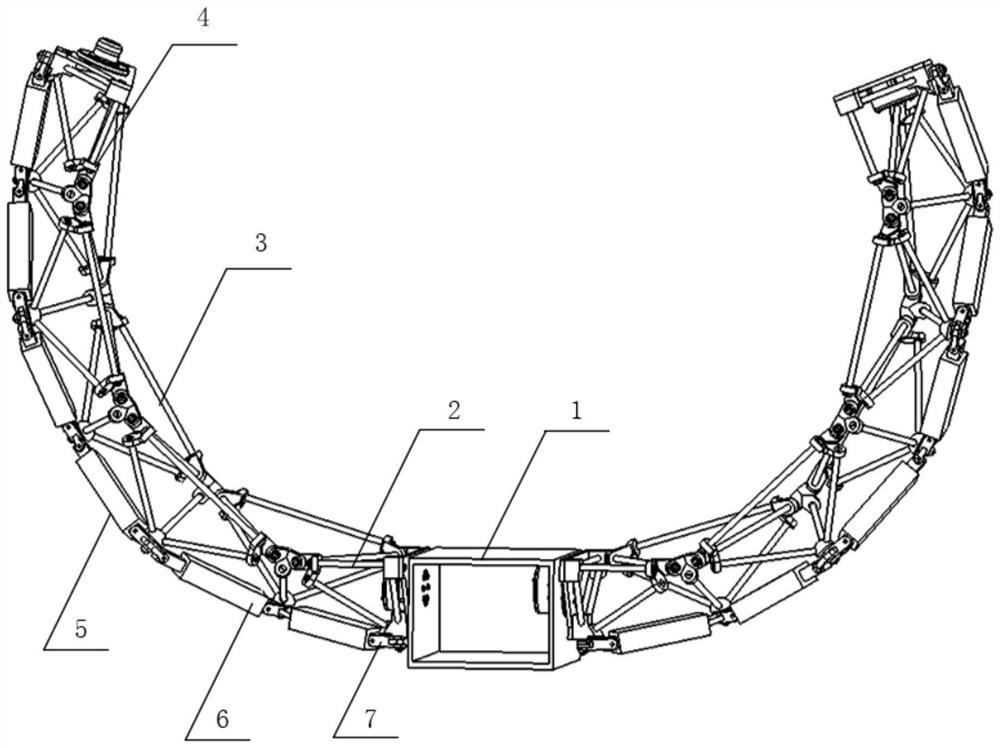
图1为本发明的结构示意图;
图2为一种抓捕网的结构示意图;
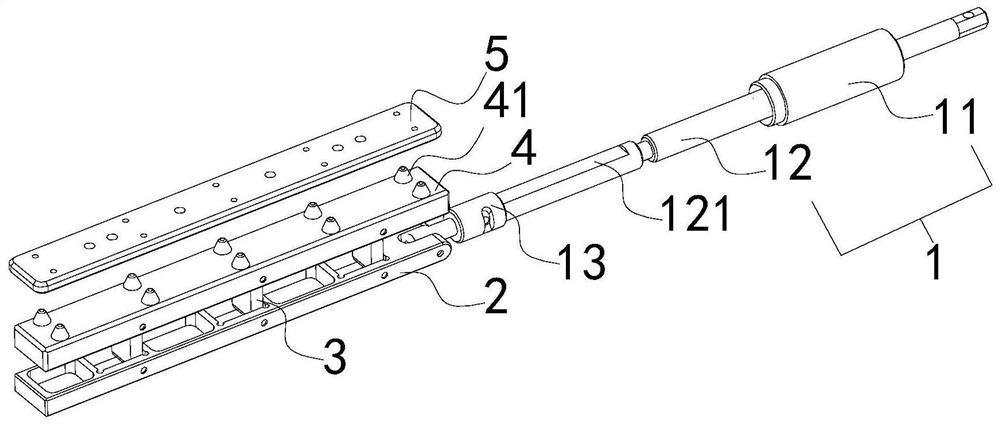
图3为收纳于航天器发射装置中的网爪结构示意图;
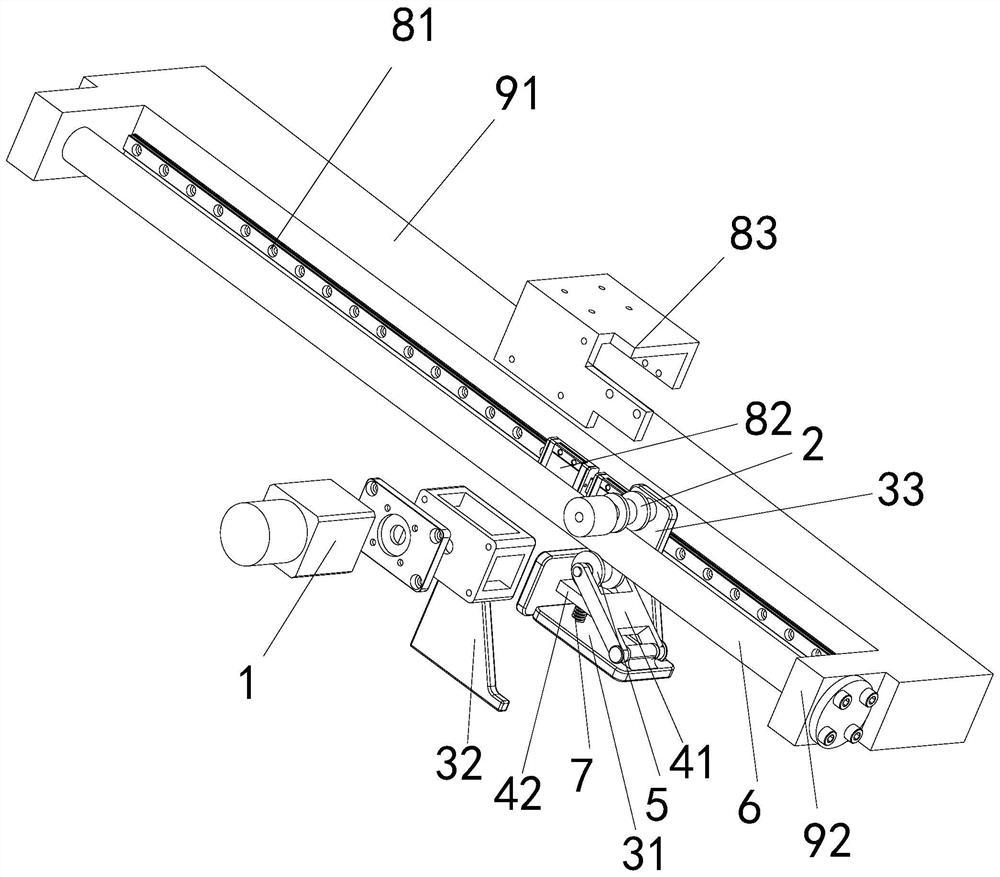
图4是收线盒内收口绳的结构示意图;
图5是定力撕裂带的工作过程示意图;
图中:
1、抓捕网;2、网爪;3、质量块;4、系留绳;5、牵引绳;6、发射杆;7、收线盒;8、爪勾;9、出线孔;10、中心杆;11、弯钩;12、收口绳;13、收口轴线绳;14、收口边线绳;15、导向环;16、定力撕裂带;17、对角线;18、外围边线。
具体实施方式
下面结合附图,对本发明的实施方式进行进一步的详细说明。
参照图1,本发明提供一种网飞爪装置组合体,包括抓捕网1以及网爪2。抓捕网1为正多边形或者圆形的绳网。本实施例中,如图1、图2所示,抓捕网1为正方形绳网。抓捕网1的几何中心设置有质量块3,质量块3与系留绳4相连接,系留绳4用于与航天器上的系留平台连接,实现抓捕网1的发射、牵引和回收。
抓捕网1的两条对角线的两端延伸出来作为牵引绳5,牵引绳5的自由端连接网爪2。本发明抓捕网1所采用的绳网材料的选择主要考虑空间环境和任务要求。空间环境要求绳网材料具有耐高低温、抗强辐射、抗剪切、强绝缘性等特性。抓捕网1由绳索交叉编织而成。由于在对目标进行捕获时,抓捕网1的两条对角线和抓捕网1的四条外围边线所承受的力较大,因此需要对抓捕网的两条对角线和抓捕网的四条外围边线进行加强加粗处理。
参照图1,抓捕网1的四角均设置有网爪2。本发明的抓捕原理是利用抓捕网和网爪的惯性,本发明网飞爪装置组合体发射出去后,抓捕网快速展开,抓捕网与目标碰撞后,抓捕网上的网爪进行回抱运动,网爪能够与绳网纠结(即网爪与绳网勾挂在一起)完成目标的捕获。
参照图3、图4、图5,为了进一步的确保抓捕绳的绳网收口,本发明利用布袋原理,通过收口绳设计了如下结构的收口结构:网爪2包括发射杆6、收线盒7以及爪勾8。所述收线盒7为圆筒形状的盒体。本实施例中,收线盒7由4个1/4盒体拼装而成,这样有利于收线盒内组成部件的安装和拆卸。
所述收线盒7的底部连接有发射杆6,发射杆6固定在收线盒7的底盖中心,牵引绳5连接在发射杆6上。收线盒7的底盖上设置有两个出线孔9,两个出线孔9对称分布在发射杆6的两侧。所述收线盒7的顶部设置有爪勾8,爪勾8固定在收线盒7的顶盖的中心。所述爪勾8包括中心杆10以及分布在中心杆10上的多个弯钩11,中心杆10从上至下分布有多层弯钩11,每层弯钩11包括呈十字形分布的四个弯钩11。参照图3,发射杆6在发射前是收纳与航天器发射装置中的,在预备发射时用于固定支撑网爪与航天器上的发射纵轴成一定角度,抓捕网发射过程中用于传导能量使抓捕网具有一定初速度并牵引抓捕网迅速展开。
收线盒7内设有收口绳12,收口绳12的两端分别从两个出线孔9穿出,其中收口绳12的一端从一出线孔9穿出后作为收口轴线绳13,收口轴线绳13用于与航天器上的系留平台连接。收口绳12的另一端从另一出线孔9穿出后作为收口边线绳14顺着抓捕网的外围边线连接到相邻网爪对应的外围边线的边角上或者连接到相邻网爪连接的牵引绳上。为避免收口边线绳14发生缠绕,在抓捕网的外围边线上均匀设置有供收口边线绳依次穿过的导向环15。抓捕网各外围边线均对应有一网爪的收口边线绳,通过外力收紧各网爪的收口轴线绳,对各外围边线上的收口边线绳进行收紧,抓捕网的各边角向其相邻的边角单向靠拢实现抓捕网的收口。当抓捕网完成目标的捕获,开始收口时,通过外力收紧各网爪的收口轴线绳,实现各收口绳的收紧,使得抓捕网的各边角均向其相邻的边角单向靠拢,从而完成进一步收口,最终形成稳定的“绳-物”复合体。
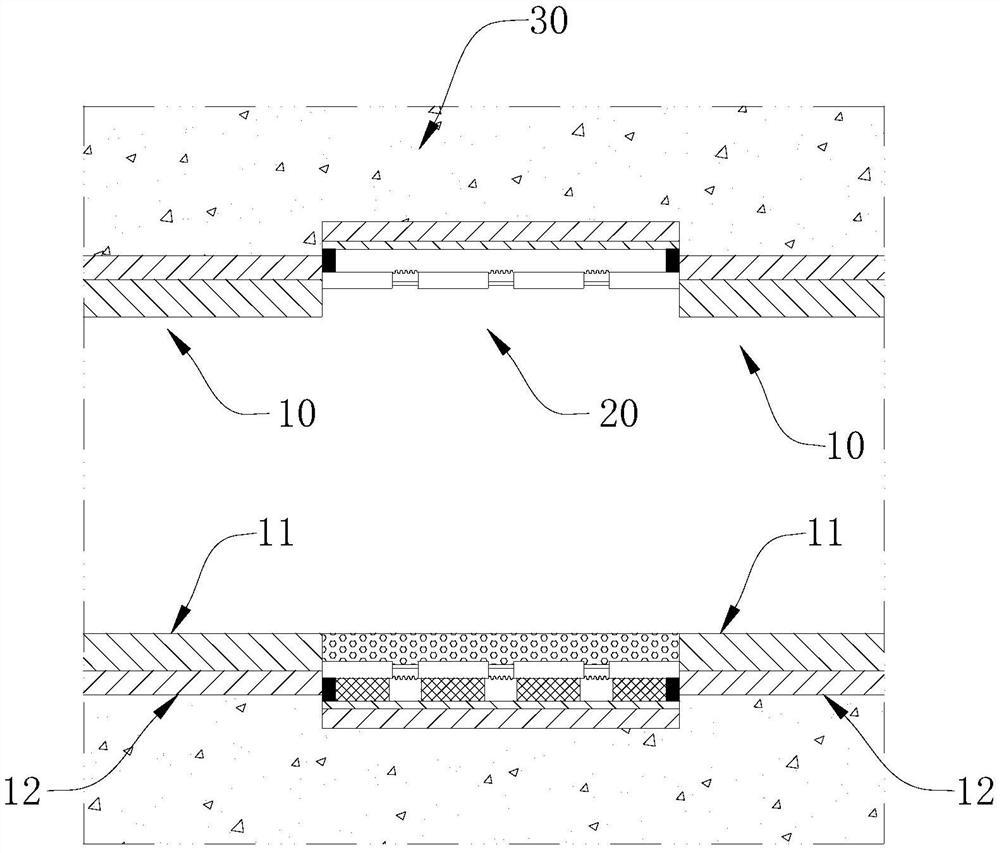
参见图4和图5,在收线盒7内部设有收口绳传导机构;所述收口绳传导机构为设置在收线盒顶盖内壁上的一系列穿线孔,收线盒7内部的收口绳呈Z字形折叠且依次穿过这一系列的穿线孔,每个穿线孔均作为收口绳的一个折叠点,每个折叠点两边的收口绳之间通过缝合的方式连接有定力撕裂带16,收紧收口绳时,定力撕裂带16两侧的收口绳在外力的作用下,定力撕裂带与收口绳之间缝合的针脚连续断裂,形成方向与外力相反的反向作用力。定力撕裂带的强度比收口绳、抓捕网所用绳索的强度低很多,在外力拉伸作用下会先断裂,如采用较细的(如直径小于0.2 mm)聚酰亚胺线缝合而成。针对绳网回弹运动导致的绳网有效工作时间和工作距离短的问题,本发明在收线盒内的收口绳上设计了定力撕裂带,当收紧收口绳时,收线盒内的收口绳被抽出收线盒的过程中,由于定力撕裂带的连续断裂,为收口绳的运动提供方向与运动相反且数值较为稳定的连续单向力。
图5为加装定力撕裂带的单根绳索的拉直过程,绳索在两端力的作用下,撕裂带缝合针脚连续断裂,形成方向与外力相反且数值较为稳定的反向作用力。
以上所述仅为本发明的优选的实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种网飞爪装置组合体专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0