

IPC分类号 : G05B13/04,F41B6/00,H02P21/18,H02P21/22,H02P21/24,H02P21/32




专利摘要
本发明公开了一种基于圆筒型磁通切换直线电机的电磁弹射系统及控制方法,该系统包括圆筒型磁通切换直线电机、辅助电磁减速装置、无位置传感器和中央控制器,无位置传感器包括初始位置检测模块、低速段位置检测模块、中高速段位置检测模块和过渡区域位置切换模块,中央控制器采用双闭环控制;双闭环控制采用重复控制、无位置检测算法和PI反馈控制相结合的速度环和PI调节空间矢量电流环。本发明将圆筒型磁通切换直线电机、无位置传感器技术、基于速度和电流控制器的双闭环控制方法相结合并应用在电磁弹射系统中,提高了弹射系统的稳定性、可靠性和动态响应能力,降低了电磁弹射装置的制造成本和安装难度。
权利要求
1.基于圆筒型磁通切换直线电机的电磁弹射系统的控制方法,其特征在于:
电磁弹射系统包括圆筒型磁通切换直线电机、辅助电磁减速装置、无位置传感器和中央控制器,其中:
圆筒型磁通切换直线电机,包括动子和定子,动子设于定子内,动子包括高矫顽力的永磁体和低电阻率的绕组,定子由硅钢构成,电磁弹射部分与动子相结合构成电磁弹射运动部分,定子铺设在电磁弹射平台上,定子的铺设长度根据弹射最终速度和弹射物体重量设计;
辅助电磁减速装置,包括固定在动子弹射前端的可调电磁减速器、固定在电磁弹射平台末端的永磁减速装置和减速控制电路,根据无位置传感器实时检测的电磁弹射运动部分的位置,减速控制电路根据无位置传感器所估算的弹射速度和位置实时调节可调电磁减速器的输出功率,使动子在电磁弹射平台末端稳定准确停止;
无位置传感器,包括初始位置检测模块、低速段位置检测模块、中高速段位置检测模块和过渡区域位置切换模块,电磁弹射器启动时,初始位置检测模块对动子的初始位置进行判读,使中央控制器输出合适的驱动电压,当动子进入低速段或中高速段时分别采用低速段位置检测模块或中高速段位置检测模块对电磁弹射器的速度和位置进行准确估测和控制,过渡区域位置切换模块采用混合观测器获取动子位置信息;
中央控制器,包括高速数据处理芯片和分别与其电连接的数据储存电路、电压调理电路、光耦隔离路、驱动电路、电流电压检测电路和三相全桥逆变电路;中央控制器采用双闭环控制;双闭环控制包括电流环和速度环,双闭环控制采用重复控制、无位置检测算法和PI反馈控制相结合的速度环和PI调节空间矢量电流环;
当启动电磁弹射任务时,先采用无位置传感器中的电压矢量注入法对动子的初始位置进行检测,其检测结果和线性霍尔计算结果进行校验,所得误差在允许范围内,获得初始角度后,驱动电路对圆筒型磁通切换直线电机施加合适的驱动电压,使动子进入低速段范围,同时切换到低速段位置检测方式,其位置信号送入双闭环控制系统;速度环通过重复PI速度控制器对给定速度和加速度进行跟踪,产生的速度误差作为电流环PI控制器的输入,通过空间矢量调制方式,由逆变器得到最后实际所需的驱动电压;
当电磁弹射任务完成后,动子进入减速制动状态,此时通过无位置传感器对动子的位置进行估测,电磁制动力的总体趋势与动子距末端的距离成反比,电磁力的输出是实时调整的,最后使动子部分安全稳定的停靠在电磁弹射平台末端;
动子位置检测包括以下步骤:
初始位置检测,采用电压矢量注入位置检测方式,即两组相同的绕组产生的合成磁链相等时,磁通方向与动子磁极最接近的绕组等效电感饱和度最高,其电感值最小,电流最大,因此可以通过检测电压脉冲所产生的电流响应的幅值大小,来确定动子初始位置,即利用不同电压矢量下d轴等效电路时间常数不同的特性,通过检测响应电流衰减到零的时间不同,判断动子的初始位置;
建立旋转d-q坐标系下圆筒型磁通切换电机的d轴磁链方程,其中A、B、C三轴表示三相静止坐标系,A、B、C三轴沿逆时针共原点环形均布,d
设动子永磁体产生的磁链为ψ
ψ
ψ
式中,△θ
比较式上面两式则有ψ
在此基础之上,利用不同电压矢量下d轴等效电路时间常数不同的特性,通过检测响应电流衰减到0的时间不同,判断动子的初始位置,无需对电流峰值进行检测,减少了对采样电路的依赖性;
电机静止时,当通入的电压脉冲方向与d
低速位置检测,当动子运动起来后,自动进入低速段位置检测阶段,3个线性霍尔传感器在1个测距磁钢的永磁极距内均匀分布,如此3个线性霍尔传感器感应的电压分布均匀且相差120电角度,通过以下正切与反正切函数计算此时动子所在位置:
u
其中,u
得到动子的初始电角度后,通过增量法计算出动子的实时速度,这些信号最后都提供给中央处理器,让其作为速度环和辅助电磁减速装置的参考值;低速段位置检测模块除检测动子在低速段的位置信号外,还对初始位置检测模块的检测结果进行校验,将其控制在设定误差范围内;
中高速段位置检测,在电磁弹射加速一段时间后就会进入高速段,采用扩张滑模观测器获取动子位置信息,通过对定子电流的观测使其逼近实际值,再通过电流方程得到等效反电动势,从而获得动子位置角估计值,方法为:
圆筒型磁通切换直线电机在d-q坐标系下的电压方程表示为:
其中,u
扩张滑膜观测器一般建立在α-β坐标系,但因为帕克变化需要电角度信息,将其从d-q坐标系变换到α-β上:
其中,u
对上式进行变形和简化:
上式中含有反电势项,同时也具备由于圆筒型磁通切换直线电机凸极效应所产生的感应电动势;通过对其感应电动势进行估计得到电角度和位置信息;
通过上面的电压方程得到其电流方程:
其中,
扩张滑膜观测器按定子电流进行设计;
其中:
[e
Z
其中,e
过渡区域位置检测,采用混合观测器获取动子位置信息,采用线性霍尔传感器和扩张滑模观测器的观测结果加以加权方式来确定混合观测器输出的动子位置角估计值;混合观测器输出的动子位置角估计值
其中:α为加权因子,
2.根据权利要求1所述的基于圆筒型磁通切换直线电机的电磁弹射系统的控制方法,其特征在于:双闭环控制将无位置传感器估算的位置送入带有重复控制优化的重复PI速度控制器里,实际值与设定值所得误差作为电流环PI控制器的输入,通过空间矢量调制方式产生电磁弹射所需的控制电流。
3.根据权利要求1所述的基于圆筒型磁通切换直线电机的电磁弹射系统的控制方法,其特征在于:
动子位置角的估计值按照如下方法获得:
初始位置检测,采用电压矢量注入位置检测,动子的两组相同的绕组产生的合成磁链相等时,磁通方向与动子磁极最接近的绕组等效电感饱和度最高,其电感值最小,电流最大,因此可以通过检测电压脉冲所产生的电流响应的幅值大小,来确定动子初始位置,即利用不同电压矢量下d轴等效电路时间常数不同的特性,通过检测响应电流衰减到零的时间不同,判断动子的初始位置;
低速段位置检测,采用线性霍尔检测方法,低速段位置检测模块包括3个线性霍尔传感器和测距磁钢,3个线性霍尔传感器在1个测距磁钢的永磁极距内均匀分布,通过3个感应电势正弦函数先对动子位置分布区域判断,然后在固定区内的单值正弦函数进行反解算,得到动子的实际位置;低速段位置检测除负责对本速度段的位置进行检测外,同时也负责对初始位置检测模块的结果进行校对和检验,设置信任和误差阈值以保证初始位置检测的正确,使电磁弹射装置不会发生误动作;
高速段位置检测,采用扩张滑模观测器来获取动子位置信息,建立圆筒型磁通切换直线电机在不同坐标系下的电磁方程,通过对定子电流的采样,同时将滑模面固定在定子电流上,采用扩张滑模观测器获取动子位置信息,通过低通滤波器对滑模控制函数进行滤波,逼近定子电流的实际值,最后得到等效反电动势,从而解算出动子位置角的估计值;
过渡区域位置检测,采用混合观测器获取动子位置信息,采用线性霍尔传感器和扩张滑模观测器的观测结果加以加权方式来确定混合观测器输出的动子位置角估计值。
说明书
技术领域
本发明涉及一种将圆筒型磁通切换直线电机应用在电磁弹射系统中,并采用无位置算法和先进闭环策略的电磁弹射装置和控制方法,尤其涉及一种基于圆筒型磁通切换直线电机的电磁弹射系统及控制方法。
背景技术
目前,电磁弹射系统是一种利用电磁力发射有效载荷的装置。它将电磁能转化成动能,借电磁力做功传动载荷。电磁弹射使用电能作能源,远比火箭推进剂和火炮火药成本低,在发射过程中的可控可调性和安全性也是化学发生器不可比拟的,其最重要的优点是:一它能把物体发射到超高速,二它发射的物体质量范围大,小至克级大至吨级,因此电磁弹射器在科学实验、航天、军事、工业和交通等方面有广泛而重要的应用。
但是电磁弹射装置的成本昂贵,普通采用的电磁弹射系统采用的是传统感应圆筒型磁通切换直线电机或者同步圆筒型磁通切换直线电机,这些电机结构在长距离电磁弹射系统中由于加工材料价格昂贵,例如高性能永磁体和高纯度铜线,会导致成本会急剧增加。同时高性能电磁弹射驱动系统都需要位置传感器提供转速与动子位置反馈信号。一般情况下采用机械式位置传感器来检测电机的转速和动子位置,如光电编码器、光栅尺和磁栅尺等。
这些机械式传感器的存在带来了很多弊端:
1)弹射电机与控制器之间的连接元件增多,抗干扰能力变差,降低了系统可靠性;
2)增加了系统的硬件成本和维护成本;
3)在电磁弹射高温或强腐蚀环境下,将使传感器性能变差、甚至失效,导致弹射系统无法正常工作。
发明内容
为了克服普通电磁弹射装置造价贵、安装困难及机械式位置传感器所带来的弊端,同时解决初始和低速段位置检测难度较大问题,本发明目的是提供一种基于圆筒型磁通切换直线电机的电磁弹射系统及控制方法,可以将磁通切换电机造价便宜、结构简单,并与无位置传感器的控制方法相结合,针对不同的速度段来选择检测方法,并且将初始位置检测、线性霍尔位置检测、扩张滑模位置观测器、重复控制器和闭环控制相结合,提供一种制造便宜、安装简单、控制稳定可靠的电磁弹射方案。
为实现上述目的,本发明采用以下技术方案:
基于圆筒型磁通切换直线电机的电磁弹射系统,包括圆筒型磁通切换直线电机、辅助电磁减速装置、无位置传感器和中央控制器,其中:
圆筒型磁通切换直线电机,包括动子和定子,动子设于定子内,动子包括高矫顽力的永磁体和低电阻率的绕组,定子由硅钢构成,电磁弹射部分与动子相结合构成电磁弹射运动部分,定子铺设在电磁弹射平台上,定子的铺设长度根据弹射最终速度和弹射物体重量设计;
辅助电磁减速装置,包括固定在动子弹射前端的可调电磁减速器、固定在电磁弹射平台末端的永磁减速装置和减速控制电路,根据无位置传感器实时检测的电磁弹射运动部分的位置,减速控制电路根据无位置传感器所估算的弹射速度和位置实时调节可调电磁减速器的输出功率,使动子在电磁弹射平台末端稳定准确停止;
无位置传感器,包括初始位置检测模块、低速段位置检测模块、中高速段位置检测模块和过渡区域位置切换模块,电磁弹射器启动时,初始位置检测模块对动子的初始位置进行判读,使中央控制器输出合适的驱动电压,当动子进入低速段或中高速段时分别采用低速段位置检测模块或中高速段位置检测模块对电磁弹射器的速度和位置进行准确估测和控制,过渡区域位置切换模块采用混合观测器获取动子位置信息;
中央控制器,包括高速数据处理芯片和分别与其电连接的数据储存电路、电压调理电路、光耦隔离路、驱动电路、电流电压检测电路和三相全桥逆变电路;中央控制器采用双闭环控制;双闭环控制包括电流环和速度环,双闭环控制采用重复控制、无位置检测算法和PI反馈控制相结合的速度环和PI调节空间矢量电流环。
双闭环控制将无位置传感器估算的位置送入带有重复控制优化的重复PI速度控制器里,实际值与设定值所得误差作为电流环PI控制器的输入,通过空间矢量调制方式产生电磁弹射所需的控制电流。
动子位置角的估计值按照如下方法获得:
初始位置检测,采用电压矢量注入位置检测,动子的两组相同的绕组产生的合成磁链相等时,磁通方向与动子磁极最接近的绕组等效电感饱和度最高,其电感值最小,电流最大,因此可以通过检测电压脉冲所产生的电流响应的幅值大小,来确定动子初始位置,即利用不同电压矢量下d轴等效电路时间常数不同的特性,通过检测响应电流衰减到零的时间不同,判断动子的初始位置;
低速段位置检测,采用线性霍尔检测方法,低速段位置检测模块包括3个线性霍尔传感器和测距磁钢,3个线性霍尔传感器在1个测距磁钢的永磁极距内均匀分布,通过3个感应电势正弦函数先对动子位置分布区域判断,然后在固定区内的单值正弦函数进行反解算,得到动子的实际位置;低速段位置检测除负责对本速度段的位置进行检测外,同时也负责对初始位置检测模块的结果进行校对和检验,设置信任和误差阈值以保证初始位置检测的正确,使电磁弹射装置不会发生误动作;
高速段位置检测,采用扩张滑模观测器来获取动子位置信息,建立圆筒型磁通切换直线电机在不同坐标系下的电磁方程,通过对定子电流的采样,同时将滑模面固定在定子电流上,采用扩张滑模观测器获取动子位置信息,通过低通滤波器对滑模控制函数进行滤波,逼近定子电流的实际值,最后得到等效反电动势,从而解算出动子位置角的估计值;
过渡区域位置检测,采用混合观测器获取动子位置信息,采用线性霍尔传感器和扩张滑模观测器的观测结果加以加权方式来确定混合观测器输出的动子位置角估计值。
基于圆筒型磁通切换直线电机的电磁弹射系统的控制方法,其特征在于:当启动电磁弹射任务时,先采用无位置传感器中的电压矢量注入法对动子的初始位置进行检测,其检测结果和线性霍尔计算结果进行校验,所得误差在允许范围内,获得初始角度后,驱动电路对圆筒型磁通切换直线电机施加合适的驱动电压,使动子进入低速段范围,同时切换到低速段位置检测方式,其位置信号送入双闭环控制系统;速度环通过重复PI速度控制器对给定速度和加速度进行跟踪,产生的速度误差作为电流环PI控制器的输入,通过空间矢量调制方式,由逆变器得到最后实际所需的驱动电压;
当电磁弹射任务完成后,动子进入减速制动状态,此时通过无位置传感器对动子的位置进行估测,电磁制动力的总体趋势与动子距末端的距离成反比,电磁力的输出是实时调整的,最后使动子部分安全稳定的停靠在电磁弹射平台末端。
基于圆筒型磁通切换直线电机的电磁弹射系统的控制方法,动子位置检测包括以下步骤:
初始位置检测,采用电压矢量注入位置检测方式,即两组相同的绕组产生的合成磁链相等时,磁通方向与动子磁极最接近的绕组等效电感饱和度最高,其电感值最小,电流最大,因此可以通过检测电压脉冲所产生的电流响应的幅值大小,来确定动子初始位置,即利用不同电压矢量下d轴等效电路时间常数不同的特性,通过检测响应电流衰减到零的时间不同,判断动子的初始位置;
建立旋转d-q坐标系下圆筒型磁通切换电机的d轴磁链方程,其中A、B、C三轴表示三相静止坐标系,A、B、C三轴沿逆时针共原点环形均布,d
设动子永磁体产生的磁链为ψf,方向和d
ψd1=Ld1id1+ψf
ψd2=Ld2id2+ψfcosΔθm
式中,Δθm为d
比较式上面两式则有ψd1>ψd2,因为Ld1绕组磁通方向和永磁磁极方向一致,因此当绕组中的电流同时增加时,处于d1轴方向的磁路更加趋于饱和,根据电感饱和效应,可以得出Ld1<Ld2,id1>id2;当两组相同的绕组产生的合成磁链相等时,磁通方向与动子磁极最接近的绕组等效电感饱和度最高,其电感值最小,电流最大,因此可以通过检测电压脉冲所产生的电流响应的幅值大小,来确定动子初始位置;
在此基础之上,利用不同电压矢量下d轴等效电路时间常数不同的特性,通过检测响应电流衰减到0的时间不同,判断动子的初始位置,无需对电流峰值进行检测,减少了对采样电路的依赖性;
电机静止时,当通入的电压脉冲方向与d
低速位置检测,当动子运动起来后,自动进入低速段位置检测阶段,3个线性霍尔传感器在1个测距磁钢的永磁极距内均匀分布,如此3个线性霍尔传感器感应的电压分布均匀且相差120电角度,通过以下正切与反正切函数计算此时动子所在位置:
uy=MSinθh=uHa
其中,ux与uy分别为计算中间变量,M为线性霍尔传感器电压信号的幅值,θh为电角度计算值,uHa uHb和uHc均是线性霍尔的感应电动势;
得到动子的初始电角度后,通过增量法计算出动子的实时速度,这些信号最后都提供给中央处理器,让其作为速度环和辅助电磁减速装置的参考值;低速段位置检测模块除检测动子在低速段的位置信号外,还对初始位置检测模块的检测结果进行校验,将其控制在设定误差范围内;
中高速段位置检测,在电磁弹射加速一段时间后就会进入高速段,采用扩张滑模观测器获取动子位置信息,通过对定子电流的观测使其逼近实际值,再通过电流方程得到等效反电动势,从而获得动子位置角估计值,方法为:
圆筒型磁通切换直线电机在d-q坐标系下的电压方程表示为:
其中,ud为d轴的电压分量,uq为q轴上的电压分量,id为d轴上的电流分量,iq为q轴上的电流向量,Ld是d轴电感,Lq是q轴电感,R为定子电阻;D为微分符号;vm为电气角频率;
扩张滑膜观测器一般建立在α-β坐标系,但因为帕克变化需要电角度信息,将其从d-q坐标系变换到α-β上:
其中,uα是α轴电压分量,uβ是β轴电压分量,iα是α轴电流分量,iβ是β轴电流分量,Lα=L0+L1cos2θm;Lαβ=L1sin2θm;Lβ=L0-L1cos2θm;L0=(Ld+Lq)/2;L1=(Ld-Lq)/2;θm为电角度值,其中有2θm变量;
对上式进行变形和简化:
上式中含有反电势项,同时也具备由于圆筒型磁通切换直线电机凸极效应所产生的感应电动势;通过对其感应电动势进行估计得到电角度和位置信息;
通过上面的电压方程得到其电流方程:
其中, K=(Ld-Lq)(vmid-piq)+vmψf,
扩张滑膜观测器按定子电流进行设计;
其中: 和 均为定子电流的观测值,Zα、Zβ均为控制函数;由于定子电流是物理测量的唯一值,所以滑膜观测面对其进行追踪,动态误差通过以下公式进行计算:
[eα eβ]
Z
其中,eα是为α轴观测电压分量,eβ是β轴观测分量,h是扩张滑膜观测器增益值,通过选取合适值,使 定子电流接近真实值;当系统进入滑膜面,即可估算出定子在中高速断的电角度和位置;
过渡区域位置检测,采用混合观测器获取动子位置信息,采用线性霍尔传感器和扩张滑模观测器的观测结果加以加权方式来确定混合观测器输出的动子位置角估计值;混合观测器输出的动子位置角估计值 表示为:
其中:α为加权因子, 为在低速段线性霍尔传感器所得动子位置角估计值, 为扩张滑模观测器所获取的动子位置角估计值。
与现有技术相比,本发明的有益效果在于:本发明提供的基于圆筒型磁通切换直线电机的装置及其控制方法,可以将圆筒型磁通切换直线电机造价便宜、结构简单和无位置传感器的控制方法相结合,针对不同的速度段来选择检测方法并且将初始位置检测、线性霍尔位置检测、扩张滑模观测器、重复控制器和闭环控制相结合,提供一种制造便宜、安装简单、控制稳定可靠的电磁弹射方案。
附图说明
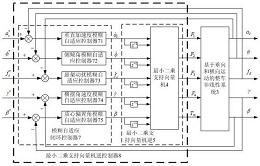
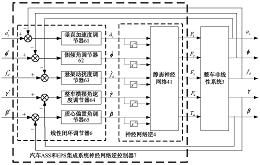
图1为基于圆筒型磁通切换直线电机的电磁弹射系统的原理框图;
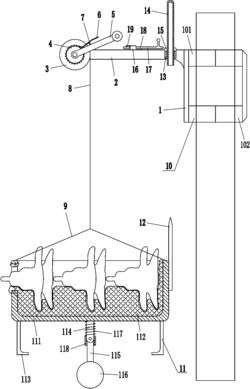
图2为圆筒型磁通切换直线电机的结构示意图;
图3(a)为初始位置检测的坐标变换图;
图3(b)为初始位置检测的注入电压矢量图;
图4为低速段位置检测的原理图。
1为圆筒型磁通切换直线电机、
1-1为动子、1-2为绕组、1-3为定子、1-4为可调电磁减速器、1-5为磁障、1-6为永磁减速装置、1-7为永磁体、
2为逆变器、3为空间矢量调制器、4为无位置传感器、5为电流环PI控制器、6为重复PI速度控制器、7为线性霍尔传感器、8为绝缘板、9为测距磁钢、10为背铁。
具体实施方式
下面结合附图对本发明作更进一步的说明。
如图1至4所示,图中包括以下部件:1为圆筒型磁通切换直线电机、1-1为动子、1-2为绕组、1-3为定子、1-4为可调电磁减速器、1-5为磁障、1-6为永磁减速装置、1-7为永磁体、2为逆变器、3为空间矢量调制器、4为无位置传感器、5为电流环PI控制器、6为重复PI速度控制器、7为线性霍尔传感器、8为绝缘板、9为测距磁钢、10为背铁。
基于圆筒型磁通切换直线电机的电磁弹射系统,包括圆筒型磁通切换直线电机、辅助电磁减速装置、无位置传感器和中央控制器,其中:
圆筒型磁通切换直线电机,包括动子和定子,动子设于定子内,动子包括高矫顽力的永磁体和低电阻率的绕组,定子由硅钢构成,电磁弹射部分与动子相结合构成电磁弹射运动部分,定子铺设在电磁弹射平台上,定子的铺设长度根据弹射最终速度和弹射物体重量设计;
辅助电磁减速装置,包括固定在动子弹射前端的可调电磁减速器、固定在电磁弹射平台末端的永磁减速装置和减速控制电路,根据无位置传感器实时检测的电磁弹射运动部分的位置,减速控制电路根据无位置传感器所估算的弹射速度和位置实时调节可调电磁减速器的输出功率,使动子在电磁弹射平台末端稳定准确停止。
无位置传感器,包括初始位置检测模块、低速段位置检测模块、中高速段位置检测模块和过渡区域位置切换模块,电磁弹射器启动时,初始位置检测模块对动子的初始位置进行判读,使中央控制器输出合适的驱动电压,当动子进入低速段或中高速段时分别采用低速段位置检测模块或中高速段位置检测模块对电磁弹射器的速度和位置进行准确估测和控制,过渡区域位置切换模块采用混合观测器获取动子位置信息;
中央控制器,包括高速数据处理芯片和分别以其电连接的数据储存电路、电压调理电路、光耦隔离路、驱动电路、电流电压检测电路和三相全桥逆变电路;中央控制器采用双闭环控制;双闭环控制包括电流环和速度环,双闭环控制采用重复控制、无位置检测算法和PI反馈控制相结合的速度环和PI调节空间矢量电流环。
如图1所示,当启动电磁弹射任务时,先采用无位置传感器中的电压矢量注入法对动子的初始位置进行观测,其观测电机初始电角度与线性霍尔传感器的计算结果进行校验,如彼此误差在允许范围内,即将电角度初始值 代入坐标变换公式,分别得到反馈电流 和空间矢量控制的调制值,根据空间矢量电压的参考值Sabc驱动逆变器对圆筒型磁通切换直线电机施加合适的驱动电压,使动子进入低速段范围,这时无位置传感器中的扩张滑膜观测器对低速段电角度进行检测,其反馈电角度信号 和速度信号 送入双闭环控制系统;速度环通过重复PI速度控制器对给定速度和加速度进行跟踪,产生的电流误差参考值 作为电流环PI控制器的输入,通过空间矢量调制方式,由逆变器得到最后实际所需的驱动电压控制电磁弹射动子按照弹射任务要求运行。
如图2所示,圆筒型磁通切换直线电机作为电磁弹射的核心装置被安装在电磁弹射平台上,其圆筒型的结构能够在圆周方向抵消所有法相电磁力,使得所产生的摩擦力急剧减少,在弹射过程中摩擦温升减小;圆筒型磁通切换直线电机的电枢绕组和永磁体都固定在短动子一侧,而长定子仅仅由硅钢组成,而现今电机的制造材料成本其中大部分都在绕组和永磁体上,采用的圆筒型磁通切换直线电机使这部分所需成本急剧降低,并且随着弹射距离增加其相对于传统弹射结构的优越性更加明显;弹射动子结构具有很强的重复性和一致性,使得其可以采用模块化设计、制造和安装,并且可以根据实际的弹射体积和重量需要实时调整动子长度,符合现代工业制造的特点。
辅助电磁减速装置,在磁通圆筒型磁通切换直线电机完成弹射任务后,需要在短距离内安全准确停止制动,仅仅靠弹射磁通切换电机自身反向制动是困难、不现实的,同时也提高了驱动系统的功率等级造成成本浪费,所以提出了一种辅助电磁减速装置,其电磁力功率控制端安装在磁通切换电机动子部分(弹射部分),相对应的永磁减速装置安装在电磁弹射平台的末端与电机磁路由磁障隔开;当电磁弹射任务完成后,动子进入减速制动状态,此时通过无位置传感器对动子的位置进行估测,电磁制动力的总体趋势与动子距末端的距离成反比,距末端越远制动电磁力越小,越近电磁力越大,电磁力的输出是实时调整的,最后使电磁弹射动子部分安全稳定的停靠在电磁弹射平台末端。
初始位置检测,初始位置检测模块为无位置传感器的一部分,对于任何永磁电机都需要对其初始位置检测,以施加与之相对应的驱动正弦电压,初始位置的检测在整个电磁弹射过程中处于非常重要的地位,如果检测出错可能会发生弹射动子震动、反向加速、加速度不够等问题,所以采用电压矢量注入位置检测方式,并采用低速段的位置检测方法对其进行校验,以保证其准确性;电压矢量注入位置检测,即两组相同的绕组产生的合成磁链相等时,磁通方向与动子磁极最接近的绕组等效电感饱和度最高,其电感值最小,电流最大,因此可以通过检测电压脉冲所产生的电流响应的幅值大小,来确定动子初始位置,即利用不同电压矢量下d轴等效电路时间常数不同的特性,通过检测响应电流衰减到零的时间不同,判断动子的初始位置。当检测到初始位置后,就可以启动电磁弹射任务。
如图3(a)所示,两组d-q绕组在不同位置示意图,设动子永磁体产生的磁链为ψf,方向和d
式中,Δθm为d
比较式上面两式则有ψd1>ψd2,因为Ld1绕组磁通方向和永磁磁极方向一致,因此当绕组中的电流同时增加时,处于d1轴方向的磁路更加趋于饱和,根据电感饱和效应,可以得出Ld1<Ld2,id1>id2。由上述分析可以得出以下结论:当两组相同的绕组产生的合成磁链相等时,磁通方向与动子磁极最接近的绕组等效电感饱和度最高,其电感值最小,电流最大,因此可以通过检测电压脉冲所产生的电流响应的幅值大小,来确定动子初始位置,但该方法需要检测电流峰值,对采样电路要求较高,采样频率也会影响到其判断的准确性,在此基础之上,利用不同电压矢量下d轴等效电路时间常数不同的特性,通过检测响应电流衰减到0的时间不同,判断动子的初始位置,无需对电流峰值进行检测,减少了对采样电路的依赖性。
电机静止时,当通入的电压脉冲方向与d
低速段位置检测,如图4所示,当电磁弹射动子运动起来后,自动进入低速段位置检测阶段,低速段位置检测模块包括3个线性霍尔传感器、测距磁钢和背铁,测距磁钢设于背铁上,3个线性霍尔传感器固定在绝缘板上,并且均匀分布在测距磁钢的磁钢极距内,如此3个线性霍尔传感器感应的电压分布均匀且相差120电角度,如图4所示,通过以下正切与反正切函数计算此时动子所在位置:
uy=MSinθh=uHa
其中,ux与uy分别为计算中间变量,M为线性霍尔传感器电压信号的幅值,θh为电角度计算值,uHa uHb和uHc均是线性霍尔的感应电动势;
得到其电角度后,通过增量法计算出动子的实时速度,这些信号最后都提供给中央处理器,让其作为速度环和辅助电磁减速装置的参考值;低速段位置检测模块除检测动子在低速段的位置信号外,还对初始位置检测模块的检测结果进行校验,将其控制在设定误差范围内。
中高速段位置检测,在电磁弹射加速一段时间后就会进入高速段,这时需采用高速段位置观测器,即扩张滑模观测器获取动子位置信息,通过对定子电流的观测使其逼近实际值,再通过电流方程得到等效反电动势,从而获得动子位置角估计值,具体方法为:
圆筒型磁通切换直线电机在d-q坐标系下的电压方程可以表示为:
其中,ud为d轴的电压分量,uq为q轴上的电压分量,id为d轴上的电流分量,iq为q轴上的电流向量,Ld是d轴电感,Lq是q轴电感,R为定子电阻;D为微分符号;vm为电气角频率;
通常来说,扩张滑膜观测器一般建立在α-β坐标系,但因为帕克变化需要电角度信息,将其从d-q坐标系变换到α-β上:
其中,uα是α轴电压分量,uβ是β轴电压分量,iα是α轴电流分量,iβ是β轴电流分量,Lα=L0+L1cos2θm;Lαβ=L1sin2θm;Lβ=L0-L1cos2θm;L0=(Ld+Lq)/2;L1=(Ld-Lq)/2;θm为电角度值,其中有2θm变量;
对上式进行变形和简化:
上式中含有反电势项,同时也具备由于圆筒型磁通切换直线电机凸极效应所产生的感应电动势;通过对其感应电动势进行估计得到电角度和位置信息;
通过上面的电压方程得到其电流方程:
其中, K=(Ld-Lq)(vmid-piq)+vmψf,
扩张滑膜观测器按定子电流进行设计;
其中: 和 均为定子电流的观测值,Zα、Zβ均为控制函数;由于定子电流是物理测量的唯一值,所以滑膜观测面对其进行追踪,动态误差通过以下公式进行计算:
[eα eβ]
Z
其中,eα是为α轴观测电压分量,eβ是β轴观测分量,h是扩张滑膜观测器增益值,通过选取合适值,使 定子电流接近真实值;当系统进入滑膜面,即可估算出定子在中高速段的角度和位置;
过渡区域位置检测,采用混合观测器获取动子位置信息,采用线性霍尔传感器和扩张滑模观测器的观测结果加以加权方式来确定混合观测器输出的动子位置角估计值;混合观测器输出的动子位置角估计值 表示为:
其中:α为加权因子, 为在低速段线性霍尔传感器所得动子位置角估计值, 为扩张滑模观测器所获取的动子位置角估计值。
以上仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
基于圆筒型磁通切换直线电机的电磁弹射系统及控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0