







专利摘要
野外环境天空偏振建模对准测量装置,提供方向基准并对复杂环境下天空偏振模式进行检测。该装置构成包括偏振图像测量模块、旋转驱动模块、激光标线模块、平台对准模块,用户控制和处理模块。检测时平台对准模块使成像通光轴与激光标线仪的中心轴线对准共线;基于激光标线模块,使装置参考方向与GPS测得的外部参考矢量对准,得到天空偏振图像的方向基准;用户控制和处理模块传送用户指令,使旋转驱动模块控制偏振片进行有序旋转,调节相机输入光的偏振态;同时使偏振图像测量模块测得偏振图像信息。该装置及检测方法适用于野外复杂环境下检测天空偏振模式,并为天空偏振建模提供可靠的方向基准。
权利要求
1.野外环境天空偏振建模对准测量装置,其特征是:包括偏振图像测量模块(1)、旋转驱动模块(2)、激光标线模块(3)、平台对准模块(4),用户控制和处理模块(5);所述偏振图像测量模块(1)和旋转驱动模块(2)分别与用户控制和处理模块(5)相连,且偏振图像测量模块(1)与旋转驱动模块(2)相连,偏振图像测量模块(1)接收用户控制和处理模块(5)输出的测量信号,进入定时成像状态;同时,旋转驱动模块(2)接收用户控制和处理模块(5)输出的时序控制信号,驱动旋转台有序转动,产生的旋转力矩带动偏振片进行旋转,偏振片调节输入天空光的偏振态,使通过鱼眼镜头的输入CCD相机的光成为对应不同偏振化方向的线偏光,线偏光进入CCD相机后成像,得到数字图像信号;偏振图像测量模块(1)将数字图像信号输出到用户控制和处理模块(5)作为解析天空偏振分布模式的原始数据,其中数字图像信号包含红、绿、蓝三种光谱的天空光强信息;由于结构上偏振图像测量模块(1)的中心轴线与旋转驱动模块(2)的中心轴线共线,通过设置旋转台的旋转零位,可以使偏振图像测量模块(1)具有的参考标线的初始位置所在方向与旋转驱动模块(2)所决定的装置参考方向一致;旋转驱动模块(2)和激光标线模块(3)分别与平台对准模块(4)面接触,结构上偏振图像测量模块(2)的中心轴线、激光标线模块(3)的中心轴线以及平台对准模块(4)的中心轴线,三者共线,从而偏振图像测量模块(1)的中心轴线与激光标线模块(3)的中心轴线也共线,易得到成像装置的姿态信息;激光标线模块(3)提供野外环境下的外部参考矢量,当外部参考矢量与偏振图像测量模块(1)决定的参考标线的初始位置所在方向共面时,即实现装置参考方向与外部参考矢量的对准;基于该对准测量装置的五个模块,采用偏振图像信息和方位基准检测方法实现对野外复杂环境下天空偏振模式的检测,并通过装置参考方向与外部参考矢量的对准,为天空偏振建模提供方向基准。
2.根据权利要求1所述的对准测量装置,其特征是:所述的偏振图像测量模块(1)由偏振片(101)、鱼眼镜头(102)、CCD相机(103)、内部支架(104)、快装板(105)、遮光套筒(106)、固定盖(107)、里盖(108)和光学玻璃(109)组成;其中固定盖(107)位于里盖(108)的轴向上方,光学玻璃(109)位于固定盖(107)的轴向下方,光学玻璃(109)的轴向下方是偏振片(101),偏振片(101)的下端和里盖(108)相连,固定盖(107)、光学玻璃(109)、偏振片(101)、里盖(108)相邻之间夹着垫片,固定盖(107)和里盖(108)之间通过螺钉连接,拧紧螺钉可以固定光学玻璃(109)和偏振片(101);固定盖(107)和遮光套筒(106)之间通过螺钉连接;在遮光套筒(106)的内部为鱼眼镜头(102)、CCD相机(103)、支架(104)和快装板(105),其中鱼眼镜头(102)位于CCD相机(103)的轴向上方,其与CCD相机(103)之间通过螺纹连接;CCD相机(103)和快装板(105)之间通过梯形导轨连接,用螺钉固定;快装板(105)和内部支架(104)之间通过螺钉连接,内部支架(104)的中心轴线与遮光套筒(106)的中心轴线同轴,且内部支架(104)穿过遮光套筒(106)底部的圆孔与旋转驱动模块(2)相连;天空光经过光学玻璃(109),通过偏振片(101)调节光的偏振态,得到线偏光,线偏光进入鱼眼镜头(102)聚光,然后进入CCD相机(103)中成像,得到数字图像信号;通过CCD相机(103)和快装板(105)之间的梯形导轨可以调节鱼眼镜头(102)到偏振片(101)的距离,扩大成像的视角范围,使之大于160°;光学玻璃(109)无色透明,不影响入射天空光的偏振态;遮光套筒(106)、固定盖(107)、光学玻璃(109)和垫片对内部的成像设备起到防水、防尘的作用,并且除了光学玻璃(109)、偏振片(101)以及鱼眼镜头(102)和CCD相机(103)的内部结构,偏振图像测量模块(1)的其它组成部分的表面都涂成黑色,以减少模块内部的光反射影响;遮光套筒(106)、固定盖(107)、里盖(108)上刻有参考标线,该条参考标线是在当遮光套筒(106)处于旋转零位时,沿着装置参考方向在遮光套筒(106)、固定盖(107)和里盖(108)上刻画的,与装置参考方向一致,装置参考方向由所述的旋转驱动模块(2)决定;由于偏振片(101)的通光轴方向是已知的,偏振片(101)安装时,使其通光轴方向与里盖(108)上的参考标线方向保持一致,这样可以保证初始偏振片(101)通光轴方向与装置参考方向一致;同时由于快装板(105)安装到内部支架(104)时,将其梯形导轨的滑动方向与遮光套筒(106)上的参考标线保持一致,这样保证了CCD相机(103)安装在快装(105)后,相机的姿态相对遮光套筒(106)是可知的。
3.根据权利要求1所述的对准测量装置,其特征是:所述的旋转驱动模块(2)由旋转台(201)、装置参考方向标志(202)、旋转底座(203)、铅锤(204)、外壳(205)组成,其中旋转台(201)与所述偏振图像测量模块(1)中的遮光套筒(106)之间通过螺钉连接;旋转台(201)中间是通孔,所述偏振图像测量模块(1)中的内部支架(104)穿过该通孔,内部支架(104)通过螺钉垂直固定在外壳(205)上;旋转台(201)和外壳(205)之间通过螺钉连接;旋转底座(203)位于外壳(205)的正下方,外壳(205)和旋转底座(203)之间通过螺钉连接;装置参考方向标志(202)粘贴在外壳(205)短轴的对称线上;铅锤(204)通过细铁链悬挂在旋转底座(203)底端的中心处;所述旋转台(201)是伺服电机和转台一体的,设置旋转台(201)的旋转零位与装置参考方向一致,装置参考方向是由转台轴心指向装置参考方向标志(202)的方向;每次工作时,旋转台(201)首先归到零位,旋转台(201)接收到用户控制和处理模块(5)输出的控制信号后,伺服电机按照一定的旋转角度和旋转速度驱动旋转台转动,旋转台带动遮光套筒(106)旋转,从而带动了偏振片(101)旋转,改变了偏振片(101)通光轴的方向,即入射光的偏振化方向与装置参考方向的相对角度发生改变;旋转底座(203)侧面刻有0°~360°的标尺,转动旋转底座(203)具有辅助对准的作用;铅锤(204)具有对中的作用,体现偏振图像测量模块(1)和旋转驱动模块(2)作为整体时其中心轴线的位置。
4.根据权利要求1所述的对准测量装置,其特征是:所述激光标线模块(3)由微调底座(303)、微调铅锤(304)、激光标线仪(305)、校准标杆(306)以及GPS定位器(307)组成;激光标线仪(305)和微调底座(303)通过螺钉连接;激光标线仪(305)表面分别有4个垂直线窗口(301)和4个水平线窗口(302),4个垂直线窗口(301)均匀分布在距离激光标线仪(305)顶端1/4高度的径向位置,4个水平线窗口(302)均匀分布在距离激光标线仪(305)顶端1/2高度的径向位置;在对准操作时,激光标线仪(305)的垂直线窗口(301)和水平线窗口(302)分别投射出垂直激光线和水平激光线,通常使用两根校准标杆(306),分别通过三角架固定在投射共面的垂直激光线所在方向,使校准标杆(306)距测站点P0相同的水平距离,且调节校准标杆(306)的高度,使其顶端以相同长度超出水平激光线;GPS定位器(307)将分别测量测站点P0和两根校准标杆(306)顶端两点P1和P2的经纬高,提供一个的外部参考矢量
5.根据权利要求1所述的对准测量装置,其特征是:所述平台对准模块(4)由上台面(401)、可调螺钉(402)、下台面(403)、地脚螺钉(404)组成;上台面(401)和下台面(403)通过可调螺钉(402)连接;下台面(403)和地脚螺钉(404)通过螺纹连接;上台面(401)通过可调螺钉(402)调平,下台面(403)通过地脚螺钉(404)调平;上台面(401)用于放置偏振图像测量模块(1)和旋转驱动模块(2)构成的整体;下台面(403)用于放置激光标线仪(305)和微调底座(303)构成的整体,且基于上台面(401)和下台面(403)同轴,在放置时,通过铅锤来调整两个整体的位置使之对准台面的中心标记,实现图像测量模块(1)的中心轴线与激光标线仪(305)的中心轴线同轴,即成像通光轴与激光标线仪(305)的中心轴线同轴。
6.根据权利要求1所述的对准测量装置,其特征是:所述的用户控制和处理模块(5)由上位机、无线通信模块和控制器组成,所述上位机通过无线通信模块给控制器发送信号,设置CCD相机(103)曝光量、成像时序,设置旋转台(201)旋转速度和旋转角度,控制器分别给相机和旋转台发送控制信号,完成成像和旋转工作,并接收CCD相机(103)的图像数字信号。
7.根据权利要求1所述对准测量装置,其特征在于:所述的偏振图像信息和方位基准检测方法步骤为:
a、选择测量地点,放置装置,调平和对中:将平台对准模块(4)的下台面(403)放在测量地点,地脚螺钉(404)调平;然后将安装了微调底座(303)的激光标线仪(305)放在下台面(403)上,调平,微调铅锤(304)对准下台面(403)的中心标记,使激光标线仪(305)的中心与下台面(403)中心在同一条铅垂线上;再将上台面(401)通过可调螺钉(402)固定在下台面(403)上,调平;将偏振图像测量模块(1)和旋转驱动模块(2)作为整体,放在上台面(401)上,调平,铅锤(204)对准上台面(401)的中心标记,使偏振图像测量模块(1)的轴心与上台面(401)中心在同一铅垂线上;然后选择两条投射共面的垂直激光线,将校准标杆(306)放置在这两条垂直激光线投射的方向上,使校准标杆(306)距测站点P0相同水平距离,且调节校准标杆(306)的高度,使其顶端以相同长度超出水平激光线;
b、测量外部参考矢量:用GPS定位器(307)测量测站点P0和校准标杆(306)顶端两点P1和P2的经纬高,即P0(λ
c、矢量对准:调节旋转底座(203)和微调底座(303),使遮光套筒(106)上刻有参考标线的所在初始位置方向与所选择的两条投射共面的垂直激光线共面,即装置参考方向与
d、采集一组偏振图像:切换CCD相机(103)到拍照功能,上位机设置旋转台(201)的工作模式,驱动旋转台(201)按照设定的旋转速度和旋转角度工作,同时采集一组图像;
e、图像采集模式设置和更改:如果需要不同时段来观测天空偏振模式变化,则在上位机上更改工作时长的设置,使转台能够定时工作,从而定时采集图像,否则直接进入下一步;
f、数据处理和分析:对采集的每组图像进行处理,得到每个像素点的光强及其Stokes参量(I
其中α是旋转角度,即入射光的偏振化方向与装置参考方向的相对角度;Stokes四个参量表示不同的物理意义,I
计算所得图像中,标志线P1P2在东北天坐标系OX′Y′Z′下的真实矢量,以该矢量作为外部参考矢量
利用GPS测量测站点P0和校准标杆底端两点P1和P2的经纬高,即P0
X=(N+h)cosLcosλ (5)
Y=(N+h)cosLsinλ (6)Z=(N(1-f)
其中,空间直角坐标系以地心为坐标原点O,XOY平面在赤道面上,OX正向指向格林尼治子午线与赤道的交点,OY正向指向东;N是卯酉圈曲率半径,a和f分别是按照WGS-84地球椭球模型得到的长半径和扁率,所以可以得到P0、P1、P2对应空间直角坐标系下的坐标(x
得到P0、P1、P2在以该装置主体为原点的东北天坐标系OX′Y′Z′下的坐标;
其中i=1、2;计算所得坐标(x
说明书
技术领域
本发明涉及天空偏振建模研究和智能信息获取领域,特别涉及野外环境天空偏振建模对准测量装置,为仿生偏振导航提供建模基础。
背景技术
太阳光穿过大气层辐射传输时,与大气粒子发生散射和吸收作用,在全天域范围内形成具有特定分布模式的偏振场,其蕴含空间信息规律,被用于仿生偏振导航。目前天空偏振模型的建立通常都是基于瑞利散射理论,该理论适用于晴朗无云的天气条件,但在多云、雾、霾等复杂天气并不适用。因此建立环境适应的偏振模型是研究仿生偏振导航需要解决的重要问题之一。
通过观测复杂天气下的天空偏振模式来修正瑞利散射模型的方法,需要一种能长期观测的成像式偏振测量装置,并且该装置还能够提供准确的坐标基准,以提高偏振图像解算静基座航向角的精度。目前的能提供方位基准的主要有惯性测量、地磁测量、GPS差分测量等。惯性测量所需成本大,地磁测量和GPS差分测量对干扰的抵抗能力差。全自动大气偏振模式图像获取系统,专利号200910116671.3,在偏振测量方面,使用可调节相位延迟器作为检偏器,只需要调节电压值就能改变偏振透光轴的相对角度,比较方便;但通过机械结构带动广角镜头对天空多个区域进行扫描和拼接组成全天域的大气偏振模式,引入了图像拼接误差,增加了测量时间,且没有考虑方位基准问题。一种大气偏振模式检测及航向解算系统及方法,专利号201611187816.5使用的四通道偏振图像采集装置,其通过图像处理得到偏振图像中太阳子午线的位置和载体体轴的夹角,当测量天气条件复杂时,偏振图像中干扰较多,精度会受到影响,不适合野外复杂环境下的偏振建模。
发明内容
本发明解决的技术问题是:克服上述现有技术的不足,如不能满足在野外复杂环境下建立精确的方向基准,以提供航向角对准,难以长期,稳定的测量天空偏振模式,很难为大气偏振建模提供有效的修正信息,为此,本发明提出了一种野外环境天空偏振建模对准测量装置。
本发明的技术方案是:野外环境天空偏振建模对准测量装置,包括偏振图像测量模块(1)、旋转驱动模块(2)、激光标线模块(3)、平台对准模块(4),用户控制和处理模块(5);所述偏振图像测量模块(1)和旋转驱动模块(2)分别与用户控制和处理模块(5)相连,且偏振图像测量模块(1)与旋转驱动模块(2)相连,偏振图像测量模块(1)接收用户控制和处理模块(5)输出的测量信号,进入定时成像状态;同时,旋转驱动模块(2)接收用户控制和处理模块(5)输出的时序控制信号,驱动旋转台有序转动,产生的旋转力矩带动偏振片进行旋转,偏振片调节输入天空光的偏振态,使通过鱼眼镜头的输入CCD相机的光成为对应不同偏振化方向的线偏光,线偏光进入CCD相机后成像,得到数字图像信号。偏振图像测量模块(1)将数字图像信号输出到用户控制和处理模块(5)作为解析天空偏振分布模式的原始数据,其中数字图像信号包含红、绿、蓝三种光谱的天空光强信息;由于结构上偏振图像测量模块(1)的中心轴线与旋转驱动模块(2)的中心轴线共线,通过设置旋转台的旋转零位,可以使偏振图像测量模块(1)具有的参考标线的初始位置所在方向与旋转驱动模块(2)所决定的装置参考方向一致;旋转驱动模块(2)和激光标线模块(3)分别与平台对准模块(4)面接触,结构上偏振图像测量模块(2)的中心轴线、激光标线模块(3)的中心轴线以及平台对准模块(4)的中心轴线,三者共线,从而偏振图像测量模块(1)的中心轴线与激光标线模块(3)的中心轴线也共线,易得到成像装置的姿态信息;激光标线模块(3)提供野外环境下的外部参考矢量,当外部参考矢量与偏振图像测量模块(1)决定的参考标线的初始位置所在方向共面时,即实现装置参考方向与外部参考矢量的对准;基于该对准测量装置的五个模块,采用偏振图像信息和方位基准检测方法实现对野外复杂环境下天空偏振模式的检测,并通过装置参考方向与外部参考矢量的对准,为天空偏振建模提供方向基准。
所述的偏振图像测量模块(1)由偏振片(101)、鱼眼镜头(102)、CCD相机(103)、内部支架(104)、快装板(105)、遮光套筒(106)、固定盖(107)、里盖(108)和光学玻璃(109)组成;其中固定盖(107)位于里盖(108)的轴向上方,光学玻璃(109)位于固定盖(107)的轴向下方,光学玻璃(109)的轴向下方是偏振片(101),偏振片(101)的下端和里盖(108)相连,固定盖(107)、光学玻璃(109)、偏振片(101)、里盖(108)相邻之间夹着垫片,固定盖(107)和里盖(108)之间通过螺钉连接,拧紧螺钉可以固定光学玻璃(109)和偏振片(101);固定盖(107)和遮光套筒(106)之间通过螺钉连接;在遮光套筒(106)的内部为鱼眼镜头(102)、CCD相机(103)、支架(104)和快装板(105),其中鱼眼镜头(102)位于CCD相机(103)的轴向上方,其与CCD相机(103)之间通过螺纹连接;CCD相机(103)和快装板(105)之间通过梯形导轨连接,用螺钉固定;快装板(105)和内部支架(104)之间通过螺钉连接,内部支架(104)的中心轴线与遮光套筒(106)的中心轴线同轴,且内部支架(104)穿过遮光套筒(106)底部的圆孔与旋转驱动模块(2)相连;天空光经过光学玻璃(109),通过偏振片(101)调节光的偏振态,得到线偏光,线偏光进入鱼眼镜头(102)聚光,然后进入CCD相机(103)中成像,得到数字图像信号;通过CCD相机(103)和快装板(105)之间的梯形导轨可以调节鱼眼镜头(102)到偏振片(101)的距离,扩大成像的视角范围,使之大于160°;光学玻璃(109)无色透明,不影响入射天空光的偏振态;遮光套筒(106)、固定盖(107)、光学玻璃(109)和垫片对内部的成像设备起到防水、防尘的作用,并且除了光学玻璃(109)、偏振片(101)以及鱼眼镜头(102)和CCD相机(103)的内部结构,偏振图像测量模块(1)的其它组成部分的表面都涂成黑色,以减少模块内部的光反射影响;遮光套筒(106)、固定盖(107)、里盖(108)上刻有参考标线,该条参考标线是在当遮光套筒(106)处于旋转零位时,沿着装置参考方向在遮光套筒(106)、固定盖(107)和里盖(108)上刻画的,与装置参考方向一致,装置参考方向由所述的旋转驱动模块(2)决定;由于偏振片(101)的通光轴方向是已知的,偏振片(101)安装时,使其通光轴方向与里盖(108)上的参考标线方向保持一致,这样可以保证初始偏振片(101)通光轴方向与装置参考方向一致;同时由于快装板(105)安装到内部支架(104)时,将其梯形导轨的滑动方向与遮光套筒(106)上的参考标线保持一致,这样保证了CCD相机(103)安装在快装(105)后,相机的姿态相对遮光套筒(106)是可知的。
所述的旋转驱动模块(2)由旋转台(201)、装置参考方向标志(202)、旋转底座(203)、铅锤(204)、外壳(205)组成,其中旋转台(201)与所述偏振图像测量模块(1)中的遮光套筒(106)之间通过螺钉连接;旋转台(201)中间是通孔,所述偏振图像测量模块(1)中的内部支架(104)穿过该通孔,内部支架(104)通过螺钉垂直固定在外壳(205)上;旋转台(201)和外壳(205)之间通过螺钉连接;旋转底座(203)位于外壳(205)的正下方,外壳(205)和旋转底座(203)之间通过螺钉连接;装置参考方向标志(202)粘贴在外壳(205)短轴的对称线上;铅锤(204)通过细铁链悬挂在旋转底座(203)底端的中心处;所述旋转台(201)是伺服电机和转台一体的,设置旋转台(201)的旋转零位与装置参考方向一致,装置参考方向是由转台轴心指向装置参考方向标志(202)的方向;每次工作时,旋转台(201)首先归到零位,旋转台(201)接收到用户控制和处理模块(5)输出的控制信号后,伺服电机按照一定的旋转角度和旋转速度驱动旋转台转动,旋转台带动遮光套筒(106)旋转,从而带动了偏振片(101)旋转,改变了偏振片(101)通光轴的方向,即入射光的偏振化方向与装置参考方向的相对角度发生改变;旋转底座(203)侧面刻有0°~360°的标尺,转动旋转底座(203)具有辅助对准的作用;铅锤(204)具有对中的作用,体现偏振图像测量模块(1)和旋转驱动模块(2)作为整体时其中心轴线的位置。
所述激光标线模块(3)由微调底座(303)、微调铅锤(304)、激光标线仪(305)、校准标杆(306)以及GPS定位器(307)组成;激光标线仪(305)和微调底座(303)通过螺钉连接;激光标线仪(305)表面分别有4个垂直线窗口(301)和4个水平线窗口(302),4个垂直线窗口(301)均匀分布在距离激光标线仪(305)顶端1/4高度的径向位置,4个水平线窗口(302)均匀分布在距离激光标线仪(305)顶端1/2高度的径向位置。在对准操作时,激光标线仪(305)的垂直线窗口(301)和水平线窗口(302)分别投射出垂直激光线和水平激光线,通常使用两根校准标杆(306),分别通过三角架固定在投射共面的垂直激光线所在方向,使校准标杆(306)距测站点P0相同的水平距离,且调节校准标杆(306)的高度,使其顶端以相同长度超出水平激光线;GPS定位器(307)将分别测量测站点P0和两根校准标杆(306)顶端两点P1和P2的经纬高,提供一个的外部参考矢量 其中测站点P0是指偏振图像测量模块(1)放置固定后,其固定盖(107)正上面的位置,P1、P2分别指两根校准标杆(306)位置固定后,校准标杆(306)顶端的位置。
所述平台对准模块(4)由上台面(401)、可调螺钉(402)、下台面(403)、地脚螺钉(404)组成;上台面(401)和下台面(403)通过可调螺钉(402)连接;下台面(403)和地脚螺钉(404)通过螺纹连接;上台面(401)通过可调螺钉(402)调平,下台面(403)通过地脚螺钉(404)调平;上台面(401)用于放置偏振图像测量模块(1)和旋转驱动模块(2)构成的整体;下台面(403)用于放置激光标线仪(305)和微调底座(303)构成的整体,且基于上台面(401)和下台面(403)同轴,在放置时,通过铅锤来调整两个整体的位置使之对准台面的中心标记,实现图像测量模块(1)的中心轴线与激光标线仪(305)的中心轴线同轴,即成像通光轴与激光标线仪(305)的中心轴线同轴。
所述的用户控制和处理模块(5)由上位机、无线通信模块和控制器组成,所述上位机通过无线通信模块给控制器发送信号,设置CCD相机(103)曝光量、成像时序,设置旋转台(201)旋转速度和旋转角度,控制器分别给相机和旋转台发送控制信号,完成成像和旋转工作,并接收CCD相机(103)的图像数字信号。
所述的偏振图像信息和方位基准检测方法步骤为:
a、选择测量地点,放置装置,调平和对中:将平台对准模块(4)的下台面(403)放在测量地点,地脚螺钉(404)调平;然后将安装了微调底座(303)的激光标线仪(305)放在下台面(403)上,调平,微调铅锤(304)对准下台面(403)的中心标记,使激光标线仪(305)的中心与下台面(403)中心在同一条铅垂线上;再将上台面(401)通过可调螺钉(402)固定在下台面(403)上,调平;将偏振图像测量模块(1)和旋转驱动模块(2)作为整体,放在上台面(401)上,调平,铅锤(204)对准上台面(401)的中心标记,使偏振图像测量模块(1)的轴心与上台面(401)中心在同一铅垂线上;然后选择两条投射共面的垂直激光线,将校准标杆(306)放置在这两条垂直激光线投射的方向上,使校准标杆(306)距测站点P0相同水平距离,且调节校准标杆(306)的高度,使其顶端以相同长度超出水平激光线;
b、测量外部参考矢量:用GPS定位器(307)测量测站点P0和校准标杆(306)顶端两点P1和P2的经纬高,即P00、L0、h0)、P1λ1、L1、h1)、P2λ2、L2、h2),其中λ0、λ1、λ2分别表示P0、P1、P2的经度,L0、L1、L2分别表示P0、P1、P2的纬度,h0、h1、h2分别表示P0、P1、P2的海拔高度,经过坐标转换计算得到外部参考矢量
c、矢量对准:调节旋转底座(203)和微调底座(303),使遮光套筒(106)上刻有参考标线的所在初始位置方向与所选择的两条投射共面的垂直激光线共面,即装置参考方向与 方向一致,即完成装置参考方向与外部参考矢量的对准,固定旋转底座(203)和微调底座(303);
d、采集一组偏振图像:切换CCD相机(103)到拍照功能,上位机设置旋转台(201)的工作模式,驱动旋转台(201)按照设定的旋转速度和旋转角度工作,同时采集一组图像;
e、图像采集模式设置和更改:如果需要不同时段来观测天空偏振模式变化,则在上位机上更改工作时长的设置,使转台能够定时工作,从而定时采集图像,否则直接进入下一步;
f、数据处理和分析:对采集的每组图像进行处理,得到每个像素点的光强及其Stokes参量(I0、Q0、U0、V0),利用Muller矩阵求出入射光的Stokes参量(I、Q、U、V,其计算偏振光的偏振度d和偏振方位角 的公式如下:
其中α是旋转角度,即入射光的偏振化方向与装置参考方向的相对角度。Stokes四个参量表示不同的物理意义,I0、I分别表示对应每个像素点和入射光的光强,Q0、Q分别表示对应每个像素点和入射光的与装置参考方向平行的线性偏振光分量的强度,U0、U分别表示对应每个像素点和入射光的与参考方向成45°角的线偏振光分量的强度,V0、V分别表示对应每个像素点和入射光的右旋圆偏振光的强度;
计算所得图像中,标志线P1P2在东北天坐标系OX′Y′Z′下的真实矢量,以该矢量作为外部参考矢量 该东北天坐标系X′OY′以测站点P0为坐标系原点O,Z′轴正向指向天顶,Y′正向指向正北,X′轴正向指向正东。外部参考矢量 的计算方式如下:
利用GPS测量测站点P0和校准标杆底端两点P1和P2的经纬高,即P0(λ0、L0、h0)、P1(λ1、L1、h1)、P2(λ2、L2、h2),根据空间直角坐标系的坐标(X、Y、Z与大地坐标系经纬高(λ、L、h)换算公式:
X=(N+h)cosLcosλ(5)
Y=(N+h)cosLsinλ(6)
Z=N(1-f)
其中,空间直角坐标系以地心为坐标原点O,XOY平面在赤道面上,OX正向指向格林尼治子午线与赤道的交点,OY正向指向东。N是卯酉圈曲率半径,a和f分别是按照WGS-84地球椭球模型得到的长半径和扁率,所以可以得到P0、P1、P2对应空间直角坐标系下的坐标(x0、y0、z0)、(x1、y1、z1)、(x2、y2、z2)。进一步利用坐标系转换矩阵C:
得到P0、P1、P2在以该装置主体为原点的东北天坐标系OX′Y′Z′下的坐标。
其中i=1、2。计算所得坐标(x1′、y1′)和(x′′、y2′)分别是P1和P2对应的东北天坐标系OX′Y′Z′下的X′OY′面上的坐标,得到外部参考向量为
与现有技术相比,本发明的优势体现在:
1、利用激光标线模块主动建立水平基准面和外部参考矢量,不依赖外界标志,不易受干扰,适用于野外复杂环境,为天空偏振模式静基座建模提供方位基准。
2、利用平台对准模块,实现偏振成像通光轴与激光标线仪的中心轴线共线,较易得到可靠的相机姿态信息,保证了基准的可靠性。
3、机电一体化设计,可以实现对天空偏振模式长期,稳定的测量。
附图说明
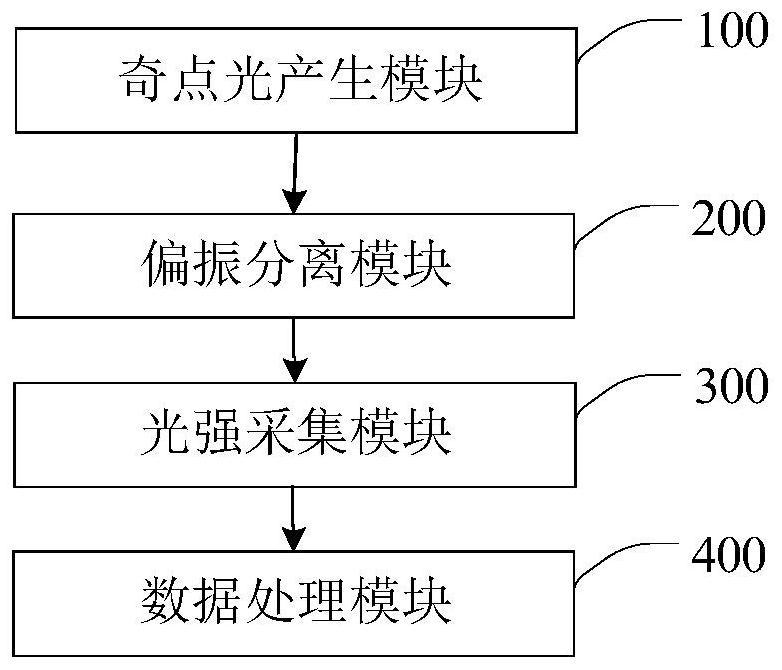
图1为本发明的野外环境天空偏振建模对准测量装置的总体结构框图;
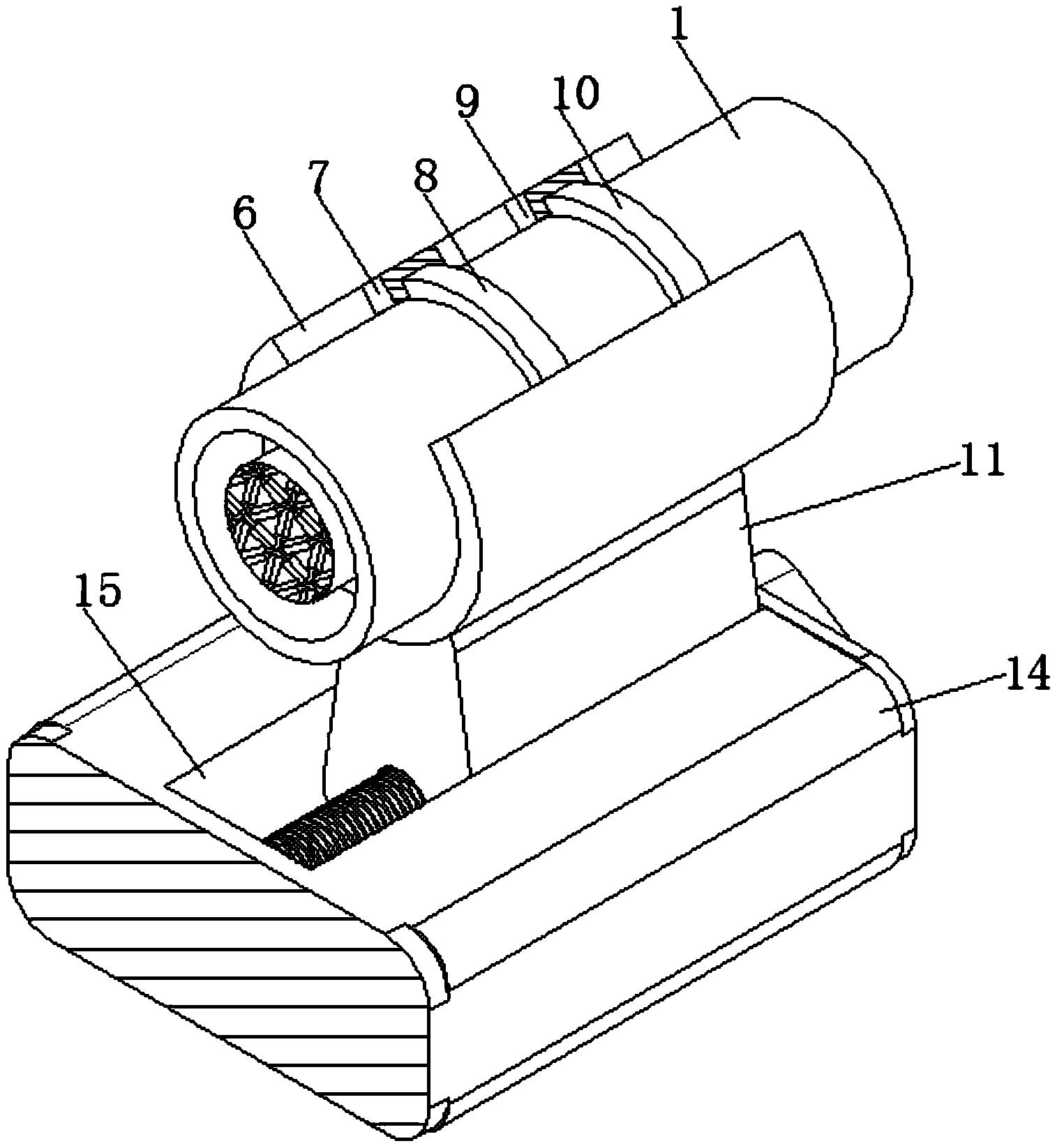
图2为偏振图像测量模块和旋转驱动模块部分剖面示意图;
图3为激光标线模块结构示意图;
图4为平台对准模块示意图;
图5为装置参考方向与外部参考矢量的对准示意图。
具体实施方式
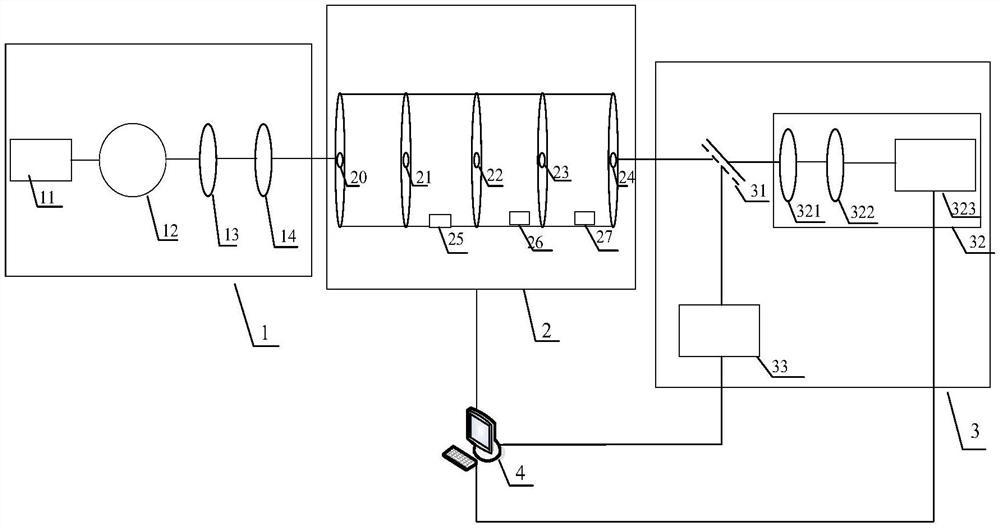
参见图1,为一种野外环境天空偏振建模对准测量装置的总体结构框图,该装置构成包括偏振图像测量模块(1)、旋转驱动模块(2)、激光标线模块(3)、平台对准模块(4),以及用户控制和处理模块(5)。偏振图像测量模块(1)和旋转驱动模块(2)分别与用户控制和处理模块(5)相连,且偏振图像测量模块(1)与旋转驱动模块(2)相连,偏振图像测量模块(1)接收用户控制和处理模块(5)输出的测量信号,进入定时成像状态;同时,旋转驱动模块(2)接收用户控制和处理模块(5)输出的时序控制信号,驱动旋转台有序转动,产生的旋转力矩带动偏振片进行旋转,偏振片调节输入天空光的偏振态,使通过鱼眼镜头的输入CCD相机的光成为对应不同偏振化方向的线偏光,线偏光进入CCD相机后成像,得到数字图像信号。偏振图像测量模块(1)将数字图像信号输出到用户控制和处理模块(5)作为解析天空偏振分布模式的原始数据,其中数字图像信号包含红、绿、蓝三种光谱的天空光强信息;由于结构上偏振图像测量模块(1)的中心轴线与旋转驱动模块(2)的中心轴线共线,通过设置旋转台的旋转零位,可以使偏振图像测量模块(1)具有的参考标线的初始位置所在方向与旋转驱动模块(2)所决定的装置参考方向一致;旋转驱动模块(2)和激光标线模块(3)分别与平台对准模块(4)面接触,结构上偏振图像测量模块(2)的中心轴线、激光标线模块(3)的中心轴线以及平台对准模块(4)的中心轴线,三者共线,从而偏振图像测量模块(1)的中心轴线与激光标线模块(3)的中心轴线也共线,易得到成像装置的姿态信息;激光标线模块(3)提供野外环境下的外部参考矢量,当外部参考矢量与偏振图像测量模块(1)决定的参考标线的初始位置所在方向共面时,即实现装置参考方向与外部参考矢量的对准
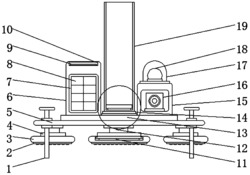
参见图2,为偏振图像测量模块(1)和旋转驱动模块(2)的部分剖面示意图,图中遮光套筒(106)、固定盖(107)、里盖(108)和外壳(205)被半剖,图中点划线表示偏振图像测量模块(1)和旋转驱动模块(2)作为整体的中心轴线。
偏振图像测量模块(1)由偏振片(101)、鱼眼镜头(102)、CCD相机(103)、内部支架(104)、快装板(105)、遮光套筒(106)、固定盖(107)、里盖(108)和光学玻璃(109)组成;其中固定盖(107)位于里盖(108)的轴向上方,光学玻璃(109)位于固定盖(107)的轴向下方,光学玻璃(109)的轴向下方是偏振片(101),偏振片(101)的下端和里盖(108)相连,固定盖(107)、光学玻璃(109)、偏振片(101)、里盖(108)相邻之间夹着垫片,固定盖(107)和里盖(108)之间通过螺钉连接,拧紧螺钉可以固定光学玻璃(109)和偏振片(101);固定盖(107)和遮光套筒(106)之间通过螺钉连接;在遮光套筒(106)的内部为鱼眼镜头(102)、CCD相机(103)、支架(104)和快装板(105),其中鱼眼镜头(102)位于CCD相机(103)的轴向上方,其与CCD相机(103)之间通过螺纹连接;CCD相机(103)和快装板(105)之间通过梯形导轨连接,用螺钉固定;快装板(105)和内部支架(104)之间通过螺钉连接,内部支架(104)的中心轴线与遮光套筒(106)的中心轴线同轴,且内部支架(104)穿过遮光套筒(106)底部的圆孔与旋转驱动模块(2)相连;天空光经过光学玻璃(109),通过偏振片(101)调节光的偏振态,得到线偏光,线偏光进入鱼眼镜头(102)聚光,然后进入CCD相机(103)中成像,得到数字图像信号;通过CCD相机(103)和快装板(105)之间的梯形导轨可以调节鱼眼镜头(102)到偏振片(101)的距离,扩大成像的视角范围,使之大于160°;光学玻璃(109)无色透明,不影响入射天空光的偏振态;遮光套筒(106)、固定盖(107)、光学玻璃(109)和垫片对内部的成像设备起到防水、防尘的作用,并且除了光学玻璃(109)、偏振片(101)以及鱼眼镜头(102)和CCD相机(103)的内部结构,偏振图像测量模块(1)的其它组成部分的表面都涂成黑色,以减少模块内部的光反射影响;遮光套筒(106)、固定盖(107)、里盖(108)上刻有参考标线,该条参考标线是在当遮光套筒(106)处于旋转零位时,沿着装置参考方向在遮光套筒(106)、固定盖(107)和里盖(108)上刻画的,与装置参考方向一致,装置参考方向由所述的旋转驱动模块(2)决定;由于偏振片(101)的通光轴方向是已知的,偏振片(101)安装时,使其通光轴方向与里盖(108)上的参考标线方向保持一致,这样可以保证初始偏振片(101)通光轴方向与装置参考方向一致;同时由于快装板(105)安装到内部支架(104)时,将其梯形导轨的滑动方向与遮光套筒(106)上的参考标线保持一致,这样保证了CCD相机(103)安装在快装(105)后,相机的姿态相对遮光套筒(106)是可知的。
旋转驱动模块(2)由旋转台(201)、装置参考方向标志(202)、旋转底座(203)、铅锤(204)、外壳(205)组成,其中旋转台(201)与所述偏振图像测量模块(1)中的遮光套筒(106)之间通过螺钉连接;旋转台(201)中间是通孔,所述偏振图像测量模块(1)中的内部支架(104)穿过该通孔,内部支架(104)通过螺钉垂直固定在外壳(205)上;旋转台(201)和外壳(205)之间通过螺钉连接;旋转底座(203)位于外壳(205)的正下方,外壳(205)和旋转底座(203)之间通过螺钉连接;装置参考方向标志(202)粘贴在外壳(205)短轴的对称线上;铅锤(204)通过细铁链悬挂在旋转底座(203)底端的中心处;所述旋转台(201)是伺服电机和转台一体的,设置旋转台(201)的旋转零位与装置参考方向一致,装置参考方向是由转台轴心指向装置参考方向标志(202)的方向;每次工作时,旋转台(201)首先归到零位,旋转台(201)接收到用户控制和处理模块(5)输出的控制信号后,伺服电机按照一定的旋转角度和旋转速度驱动旋转台转动,旋转台带动遮光套筒(106)旋转,从而带动了偏振片(101)旋转,改变了偏振片(101)通光轴的方向,即入射光的偏振化方向与装置参考方向的相对角度发生改变;旋转底座(203)侧面刻有0°~360°的标尺,转动旋转底座(203)具有辅助对准的作用;铅锤(204)具有对中的作用,体现偏振图像测量模块(1)和旋转驱动模块(2)作为整体时其中心轴线的位置。
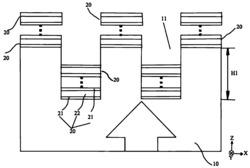
参见图3,为激光标线模块(3)结构示意图,图中点划线表示激光标线仪(305)的中心轴线。激光标线模块(3)由微调底座(303)、微调铅锤(304)、激光标线仪(305)、校准标杆(306)以及GPS定位器(307)组成;激光标线仪(305)和微调底座(303)通过螺钉连接;激光标线仪(305)表面分别有4个垂直线窗口(301)和4个水平线窗口(302),4个垂直线窗口(301)均匀分布在距离激光标线仪(305)顶端1/4高度的径向位置,4个水平线窗口(302)均匀分布在距离激光标线仪(305)顶端1/2高度的径向位置。在对准操作时,激光标线仪(305)的垂直线窗口(301)和水平线窗口(302)分别投射出垂直激光线和水平激光线,通常使用两根校准标杆(306),分别通过三角架固定在投射共面的垂直激光线所在方向,使校准标杆(306)距测站点P0相同的水平距离,且调节校准标杆(306)的高度,使其顶端以相同长度超出水平激光线;GPS定位器(307)将分别测量测站点P0和两根校准标杆(306)顶端两点P1和P2的经纬高,提供一个的外部参考矢量 其中测站点P0是指偏振图像测量模块(1)放置固定后,其固定盖(107)正上面的位置,P1、P2分别指两根校准标杆(306)位置固定后,校准标杆(306)顶端的位置。
参见图4,为平台对准模块(4)示意图,图中点划线表示平台对准模块(4)的中心轴线。平台对准模块(4)由上台面(401)、可调螺钉(402)、下台面(403)、地脚螺钉(404)组成;上台面(401)和下台面(403)通过可调螺钉(402)连接;下台面(403)和地脚螺钉(404)通过螺纹连接;上台面(401)通过可调螺钉(402)调平,下台面(403)通过地脚螺钉(404)调平;上台面(401)用于放置偏振图像测量模块(1)和旋转驱动模块(2)构成的整体;下台面(403)用于放置激光标线仪(305)和微调底座(303)构成的整体,且基于上台面(401)和下台面(403)同轴,在放置时,通过铅锤来调整两个整体的位置使之对准台面的中心标记,实现图像测量模块(1)的中心轴线与激光标线仪(305)的中心轴线同轴,即成像通光轴与激光标线仪(305)的中心轴线同轴。
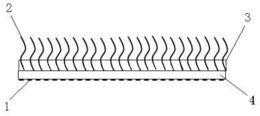
参见图5,为装置参考方向与外部参考矢量的对准示意图。图中水平的点划线表示激光标线仪(305)投出的2条垂直激光线,图中竖直的点划线表示激光标线仪(305)投出的2条水平激光线,图中双虚线表示固定盖(107)上的参考标线。外部参考矢量 与固定盖(107)上刻有的参考标线共线时,装置参考方向与外部参考矢量方向一致,即完成对准,对准后,采集的每组偏振图像都基于该外部参考矢量,为建立偏振模型提供了方向基准。
基于野外环境天空偏振建模对准测量装置,实现偏振图像信息和方位基准检测方法如下:
a、选择测量地点,放置装置,调平和对中:将平台对准模块(4)的下台面(403)放在测量地点,地脚螺钉(404)调平;然后将安装了微调底座(303)的激光标线仪(305)放在下台面(403)上,调平,微调铅锤(304)对准下台面(403)的中心标记,使激光标线仪(305)的中心与下台面(403)中心在同一条铅垂线上;再将上台面(401)通过可调螺钉(402)固定在下台面(403)上,调平;将偏振图像测量模块(1)和旋转驱动模块(2)作为整体,放在上台面(401)上,调平,铅锤(204)对准上台面(401)的中心标记,使偏振图像测量模块(1)的轴心与上台面(401)中心在同一铅垂线上;然后选择两条投射共面的垂直激光线,将校准标杆(306)放置在这两条垂直激光线投射的方向上,使校准标杆(306)距测站点P0相同水平距离,且调节校准标杆(306)的高度,使其顶端以相同长度超出水平激光线;
b、测量外部参考矢量:用GPS定位器(307)测量测站点P0和校准标杆(306)顶端两点P1和P2的经纬高,即P0(λ0、L0、h0)、P1(λ1、L1、h1)、P2(λ2、L2、h2),其中λ0、λ1、λ2分别表示P0、P1、P2的经度,L0、L1、L2分别表示P0、P1、P2的纬度,h0、h1、h2分别表示P0、P1、P2的海拔高度,经过坐标转换计算得到外部参考矢量
c、矢量对准:调节旋转底座(203)和微调底座(303),使遮光套筒(106)上刻有参考标线的所在初始位置方向与所选择的两条投射共面的垂直激光线共面,即装置参考方向与 方向一致,即完成装置参考方向与外部参考矢量的对准,固定旋转底座(203)和微调底座(303);
d、采集一组偏振图像:切换CCD相机(103)到拍照功能,上位机设置旋转台(201)的工作模式,驱动旋转台(201)按照设定的旋转速度和旋转角度工作,同时采集一组图像;
e、图像采集模式设置和更改:如果需要不同时段来观测天空偏振模式变化,则在上位机上更改工作时长的设置,使转台能够定时工作,从而定时采集图像,否则直接进入下一步;
f、数据处理和分析:对采集的每组图像进行处理,得到每个像素点的光强及其Stokes参量(I0、Q0、U0、V0),利用Muller矩阵求出入射光的Stokes参量(I、Q、U、V,其计算偏振光的偏振度d和偏振方位角 的公式如下:
其中α是旋转角度,即入射光的偏振化方向与装置参考方向的相对角度。Stokes四个参量表示不同的物理意义,I0、I分别表示对应每个像素点和入射光的光强,Q0、Q分别表示对应每个像素点和入射光的与装置参考方向平行的线性偏振光分量的强度,U0、U分别表示对应每个像素点和入射光的与参考方向成45°角的线偏振光分量的强度,V0、V分别表示对应每个像素点和入射光的右旋圆偏振光的强度;
计算所得图像中,标志线P1P2在东北天坐标系OX′Y′Z′下的真实矢量,以该矢量作为外部参考矢量 该东北天坐标系X′OY′以测站点P0为坐标系原点O,Z′轴正向指向天顶,Y′正向指向正北,X′轴正向指向正东。外部参考矢量 的计算方式如下:
利用GPS测量测站点P0和校准标杆底端两点P1和P2的经纬高,即P0(λ0、L0、h0)、P1(λ1、L1、h1)、P2(λ2、L2、h2),根据空间直角坐标系的坐标(X、Y、Z与大地坐标系经纬高(λ、L、h)换算公式:
X=(N+h)cosLcosλ(5)
Y=(N+h)cosLsinλ(6)
Z=N(1-f)
其中,空间直角坐标系以地心为坐标原点O,XOY平面在赤道面上,OX正向指向格林尼治子午线与赤道的交点,OY正向指向东。N是卯酉圈曲率半径,a和f分别是按照WGS-84地球椭球模型得到的长半径和扁率,所以可以得到P0、P1、P2对应空间直角坐标系下的坐标(x0、y0、z0)、(x1、y1、z1)、(x2、y2、z2)。进一步利用坐标系转换矩阵C:
得到P0、P1、P2在以该装置主体为原点的东北天坐标系OX′Y′Z′下的坐标。
其中i=1、2。计算所得坐标(x1′、y1′)和(x′2、y2′)分别是P1和P2对应的东北天坐标系OX′Y′Z′下的X′OY′面上的坐标,得到外部参考向量为
野外环境天空偏振建模对准测量装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0