









专利摘要
本发明属于火力发电机组的机炉协调控制领域,尤其涉及一种基于预给煤控制模型的协调控制系统参数动态整定方法。应用于火电机组AGC方式运行时协调控制系统动态参数优化,改善机组主要被控量性能指标,使机组负荷达到电网技术指标要求。本发明利用计算机软件辅助求取控制算法参数,简化调试过程,缩短动态参数求取时间。充分发挥当前DCS系统历史数据全面、精度高、时间跨度大等特点,利用软件分析机组运行的历史数据,结合机组现场变负荷试验,利用计算机软件辅助求取控制算法参数,起到事半功倍的作用。
权利要求
1.基于预给煤控制模型的协调控制系统参数动态整定方法,其特征在于包括以下步骤:
第一步:对原协调控制系统的逻辑组态锅炉主控回路中增加预给煤控制回路接口;
第二步:进行预给煤控制回路逻辑组态,并将其输出引入到预给煤控制回路接口中作为锅炉控制的前馈信号;
第三步:增加主汽压力内模控制器,并将其输出引入到锅炉主控回路中作为压力回路输入信号;
第四步:从机组DCS历史站中导出历史数据,利用计算机软件辅助整定预给煤控制模型参数;
第五步:控制系统投入实际运行,根据运行曲线,检验控制效果。
2.根据权利要求1所述的基于预给煤控制模型的协调控制系统参数动态整定方法,其特征在于:所述的预给煤控制模型充分考虑到锅炉的动态平衡,锅炉输入变化率指令(BIR)是以负荷指令信号为基础,根据相应子控制回路单独产生,并作为前馈信号个别加到给水、燃料、风量、减温喷水等的指令信号上;各BIR信号可根据机组负荷上升和下降单独调节信号的强弱。
3.根据权利要求1所述的基于预给煤控制模型的协调控制系统参数动态整定方法,其特征在于:所述锅炉主控回路中加入了预给煤运算的逻辑,当升降负荷的逻辑信号置位时,给出一个额外的加减煤量的指令,经若干时间该信号消失,该信号的作用为给煤的正向冲量。
4.根据权利要求1所述的基于预给煤控制模型的协调控制系统参数动态整定方法,其特征在于:所述预给煤的运算逻辑中还设有复位冲量,是由负荷指令与机组负荷的差值信号经一个函数发生器而形成,该函数参数整定为非线性比例调节器。
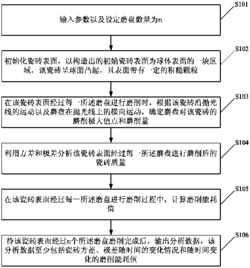
5.根据权利要求1所述的基于预给煤控制模型的协调控制系统参数动态整定方法,其特征在于:所述的预给煤控制模型通过分析机组运行的历史数据,求取参数的步骤如下:
(1)计算负荷燃料比的数据期望值,得出不同负荷值下的燃料量平均值;
(2)根据变负荷开始阶段主汽压力响应时间平均值确定变负荷开始时的正向冲量幅度值;
(3)根据变负荷开始阶段主汽压力响应时间平均值确定变负荷开始时的正向冲量持续时间;
(4)根据变负荷临近结束阶段主汽压力响应时间平均值确定变负荷结束时的复位冲量幅度值;
(5)根据变负荷临近结束阶段主汽压力响应时间平均值确定变负荷结束时的复位冲量持续时间;
(6)根据变负荷结束后主汽压力偏差与负荷偏差的比值平均值整定变负荷结束阶段主汽压力与负荷偏差关系模型参数;
(7)查询机组主汽压力运行的历史数据,找出主汽压力偏差最大值及持续时间,对主汽压力偏差进行限制,设定主汽压力内模控制器的比例及幅值限制参数;
(8)将运行机组投入协调控制,进行变负荷试验,检验试验结果是否符合控制要求,如果控制效果欠佳,重复上述步骤,知道求取参数满足控制要求为止。
说明书
技术领域
本发明属于火力发电机组的机炉协调控制领域,尤其涉及一种基于预给煤控制模型的协调控制系统参数动态整定方法。应用于火电机组AGC方式运行时协调控制系统动态参数优化,改善机组主要被控量性能指标,使机组负荷达到电网技术指标要求。
背景技术
火电机组协调控制系统是机组控制中的最高级控制器,负责协调汽轮机与锅炉间的能量平衡控制,保证机组向电网安全、稳定供电,维持电网安全稳定运行。协调控制被控对象为多输入多输出系统,具有非线性、参数慢时变、以及大迟滞与大惯性的特点,从而给控制系统的设计与实现带来许多困难。
针对单元机组协调控制系统的相关问题国内学者已经进行了多年的研究与探讨,发表了多篇技术文献,其中突出的代表包括:《中国电机工程学报》的《汽包炉单元机组协调受控对象的动态特性剖析》;《中国电力》的《预给煤控制逻辑在单元机组协调控制系统中的应用》;《中国电力》的《超临界机组协调控制系统设计新方法及其工程应用》等。文献中都对机组特性的数学模型、控制策略进行了详细的阐述,并提出了协调控制系统设计方法与应用实例,但对特定控制模型在具体工程实践中的参数整定方法没有进行深入探讨。
目前对火电机组的机炉协调控制研究进一步向纵深发展,主要集中在提高机组负荷响应特性,减少锅炉纯滞后时间,来提高AGC性能指标。主要途径是优化锅炉前馈指令、主汽压力指令、利用前馈方法实现解耦控制。例如中国专利“直流炉单元机组直接能质平衡协调控制系统”专利号201110103988提出采用直接能量平衡机理实现汽机功率调节回路与锅炉燃烧调节回路间的动态解耦,采用直接质量、流量平衡机理实现汽机功率调节回路与锅炉给水调节回路间的动态解耦,将通常的直流炉单元机组3×n多变量并行控制系统解耦成为一个具有递阶控制结构的解耦控制回路。中国专利“火力发电机炉直接指令平衡协调控制方法”专利号200810240315提出了根据机组负荷指令、机组实发功率和主蒸汽压力采用直接指令平衡系统进行调节和校正,然后去控制汽机调门开度和锅炉总燃料量,直接指令平衡系统包括基于动态超前给煤的锅炉指令模型、分段线性的汽机指令模型和实现滑压段动态解耦的汽压设定值模型。中国专利“火电厂单元机组协调控制系统被控对象动态参数整定方法”专利号200910048721.9,提出了应用被控对象本身内在的物理规律和约束条件对其动态参数进行最优化求解,通过计算整定出被控对象全部动态参数。中国专利“一种超临界直流炉综合型协调控制方法”专利号200810240315提出了一种超临界直流炉综合型协调控制方法,在锅炉主控指令中增加状态观测器进行控制。
以上这些文献及专利的共性在于都是提出了协调控制系统控制器的优化设计方案,实现主汽压力、负荷及主汽温度的解耦控制,降低锅炉控制惯性时间,通过指令前馈的方法来实现控制目标,控制方法的核心内容都是前馈指令“粗调”与反馈PID控制“细调”相结合。在具体工程实践中,已有控制方案存在数学模型建立比较困难,参数整定过程繁杂,控制效果严重依赖热工工程师技术水平的问题。
发明内容
针对上述存在的技术问题,本发明提出了基于预给煤技术的协调控制模型,并针对该模型提供一种基于预给煤控制模型的协调控制系统参数动态整定方法,其目的是充分发挥当前DCS系统历史数据全面、精度高、时间跨度大等特点,利用软件分析机组运行的历史数据,结合机组现场变负荷试验,利用计算机软件辅助求取控制算法参数,做到事半功倍,调试过程相对简化,调试周期显著缩短。
本发明的目的是通过下述技术方案实现的。
基于预给煤控制模型的协调控制系统参数动态整定方法,包括以下步骤:
第一步:对原协调控制系统的逻辑组态锅炉主控回路中增加预给煤控制回路接口;
第二步:进行预给煤控制回路逻辑组态,并将其输出引入到预给煤控制回路接口中作为锅炉控制的前馈信号;
第三步:增加主汽压力内模控制器,并将其输出引入到锅炉主控回路中作为压力回路输入信号;
第四步:从机组DCS历史站中导出历史数据,利用计算机软件辅助整定预给煤控制模型参数;
第五步:控制系统投入实际运行,根据运行曲线,检验控制效果。
所述的预给煤控制模型充分考虑到锅炉的动态平衡,锅炉输入变化率指令(BIR)是以负荷指令信号为基础,根据相应子控制回路单独产生,并作为前馈信号个别加到给水、燃料、风量、减温喷水等的指令信号上;各BIR信号可根据机组负荷上升和下降单独调节信号的强弱。
所述的锅炉主控回路中加入了预给煤运算的逻辑,当升降负荷的逻辑信号置位时,给出一个额外的加减煤量的指令,经若干时间该信号消失,该信号的作用为给煤的正向冲量;
所述的预给煤的运算逻辑中还设有复位冲量,是由负荷指令与机组负荷的差值信号经一个函数发生器而形成,该函数参数整定为非线性比例调节器。
所述的预给煤控制模型通过分析机组运行的历史数据,求取参数的步骤如下:
(1)计算负荷燃料比的数据期望值,得出不同负荷值下的燃料量平均值;
(2)根据变负荷开始阶段主汽压力响应时间平均值确定变负荷开始时的正向冲量幅度值;
(3)根据变负荷开始阶段主汽压力响应时间平均值确定变负荷开始时的正向冲量持
续时间;
(4)根据变负荷临近结束阶段主汽压力响应时间平均值确定变负荷结束时的复位冲量幅度值;
(5)根据变负荷临近结束阶段主汽压力响应时间平均值确定变负荷结束时的复位冲量持续时间;
(6)根据变负荷结束后主汽压力偏差与负荷偏差的比值平均值整定变负荷结束阶段主汽压力与负荷偏差关系模型参数;
(7)查询机组主汽压力运行的历史数据,找出主汽压力偏差最大值及持续时间,对主汽压力偏差进行限制,设定主汽压力内模控制器的比例及幅值限制参数;
(8)将运行机组投入协调控制,进行变负荷试验,检验试验结果是否符合控制要求,如果控制效果欠佳,重复上述步骤,知道求取参数满足控制要求为止。
本发明的优点效果是:提出了基于预给煤模型与主汽压力内模控制相结合的控制算法;提取机组DCS历史站中的机组历史运行参数,利用计算机软件辅助求取控制算法参数,简化调试过程,缩短动态参数求取时间。针对所提出的特定控制模型,设计了专用调试方法。本发明充分发挥当前DCS系统历史数据全面、精度高、时间跨度大等特点,利用软件分析机组运行的历史数据,结合机组现场变负荷试验,利用计算机软件辅助求取控制算法参数,起到事半功倍的作用。
附图说明:
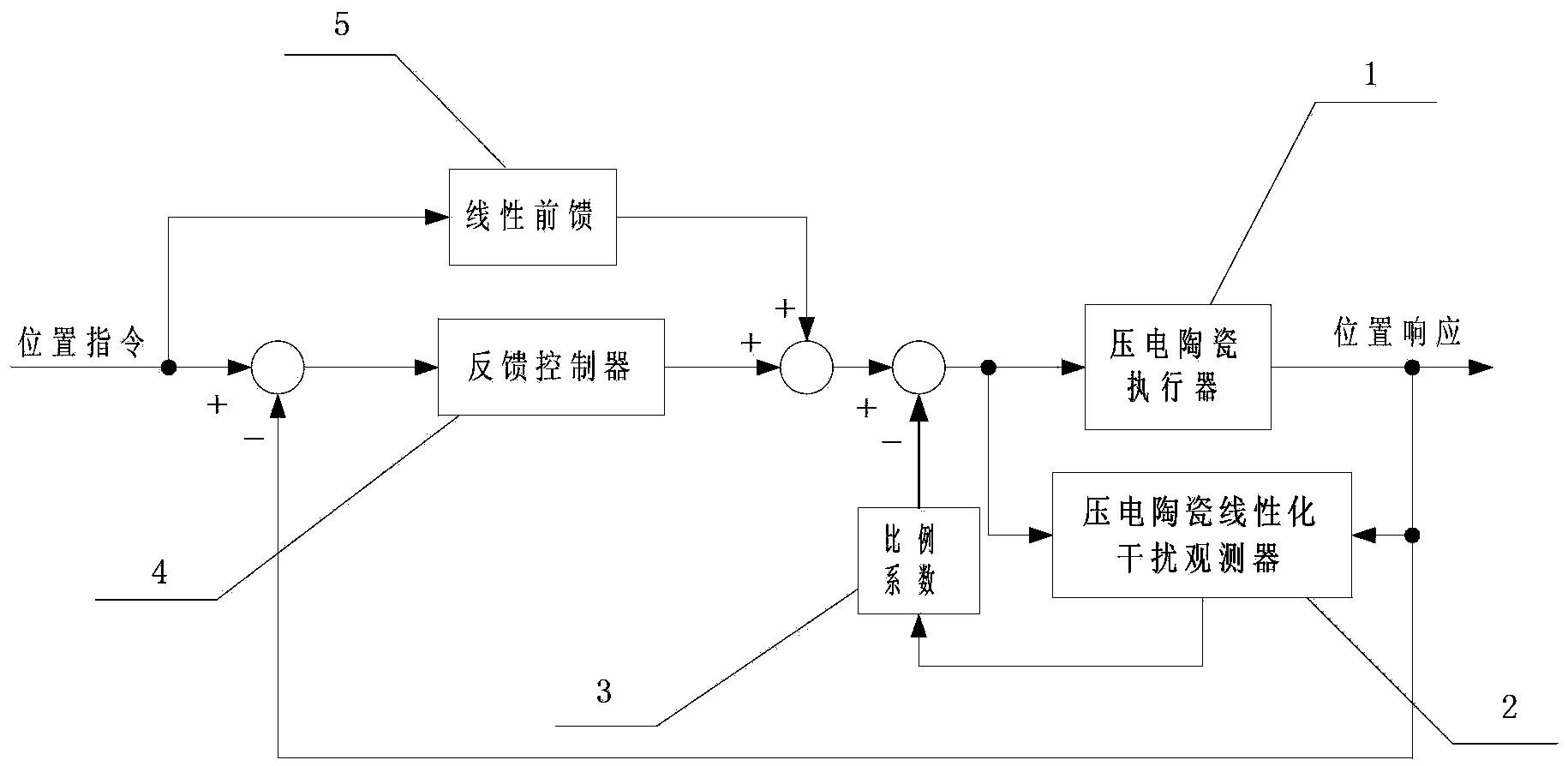
图1是本发明算法框图;
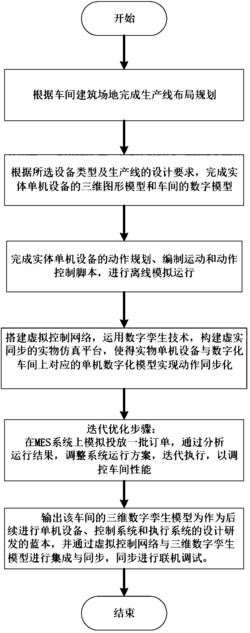
图2是本发明的工作流程框图。
下面结合附图和具体实施例对本发明作进一步详细的说明。
具体实施方式
本发明是一种基于预给煤控制模型的协调控制系统参数动态整定方法,包括以下步骤:
第一步:对原协调控制系统的逻辑组态锅炉主控回路中增加预给煤控制回路接口;
第二步:进行预给煤控制回路逻辑组态,并将其输出引入到预给煤控制回路接口中作为锅炉控制的前馈信号;
第三步:增加主汽压力内模控制器,并将其输出引入到锅炉主控回路中作为压力回路输入信号;
第四步:从机组DCS历史站中导出历史数据,利用计算机软件辅助整定预给煤控制模型参数;
第五步:控制系统投入实际运行,根据运行曲线,检验控制效果。
图2所示,图2是本发明的工作流程框图。
预给煤控制模型充分考虑到锅炉的动态平衡,锅炉输入变化率指令(BIR)是以负荷指令信号为基础,根据相应子控制回路单独产生,并作为前馈信号个别加到给水、燃料、风量、减温喷水等的指令信号上。各BIR信号可根据机组负荷上升和下降单独调节信号的强弱。
为最大限度地降低锅炉迟滞和惯性对升降负荷的影响,在锅炉主控回路中加入了预给煤运算的逻辑,当升降负荷的逻辑信号置位时,给出一个额外的加减煤量的指令,经若干时间该信号消失,该信号的作用为给煤的正向冲量。
当升降负荷的逻辑信号复位时,此时要求升降负荷的过程已结束,但由于锅炉迟滞的作用,此时此刻进入锅炉的煤量将在随后的过程中产生过量的影响,因此在预给煤的运算逻辑中还设计了一个复位冲量,用以防止锅炉汽压的“过调”。由实际负荷指令与机组负荷的差值信号经一个函数发生器而形成,该函数参数整定是一非线性比例调节器,在负荷指令与机组负荷的差值信号较大时,说明锅炉跟不上汽机的变化,因此输出指令信号给锅炉主控器,令其再额外地增加或减少一部分煤量,起“加速器”的作用。
预给煤控制模型涉及到10个函数发生器,包括50多个参数需要整定,采用传统试凑法则需要大量的调试时间,经历繁杂的调试过程。通过分析机组运行的历史数据,求取参数的步骤如下:
(1)计算负荷燃料比的数据期望值,得出不同负荷值下的燃料量平均值;
(2)根据变负荷开始阶段主汽压力响应时间平均值确定变负荷开始时的正向冲量幅度值;
(3)根据变负荷开始阶段主汽压力响应时间平均值确定变负荷开始时的正向燃料冲量持续时间;
(4)根据变负荷临近结束阶段主汽压力响应时间平均值确定变负荷结束时的复位燃料冲量幅度值;
(5)根据变负荷临近结束阶段主汽压力响应时间平均值确定变负荷结束时的复位燃料冲量持续时间;
(6)根据变负荷结束后主汽压力偏差与负荷偏差的比值平均值整定变负荷结束阶段主汽压力与负荷偏差关系模型参数;
(7)查询机组主汽压力运行的历史数据,找出主汽压力偏差最大值及持续时间,对主汽压力偏差进行限制,设定主汽压力内模控制器的比例及幅值限制参数;
(8)将运行机组投入协调控制,进行变负荷试验,检验试验结果是否符合控制要求,如果控制效果欠佳,重复上述步骤,知道求取参数满足控制要求为止。
本发明算法框图,即单元机组协调控制的预给煤控制逻辑如图1所示。图1中,“目标负荷”、“主汽压力定值”为人工设定的模拟量数值,“SELRATE”为开始变负荷信号,由AGC或运行员触发,“机组负荷”为机组负荷实际测量值。控制算法中有关函数从f1(x)~f10(x)需要根据实际机组运行特点,不同工况下对应的算法参数并不相同。如图1所示,目标负荷指令与实际负荷指令的差,计算出变负荷目标梯度值,当“SELRATE”为“1”时,逻辑中自动记忆该变量值,预先加入或减掉若干煤量的计算值。下面以升负荷为例,描述算法正向冲量的计算过程,根据计算出变负荷目标梯度值,由f10(x)决定预给煤信号的作用幅度R1,即预先增加燃料量幅度值;由函数f5(x)决定脉冲长度S1即预先增加燃料量持续时间。这两个函数的参数值可以根据机组历史运行数据中变负荷部分的工况,判断锅炉的纯延迟时间,延迟时间越大,加减煤幅度越大,可以将锅炉快速从静态工况进入动态工况。参数具体效果通过实际变负荷试验检验,如果R1过大而S1过小,则会使预给煤信号消失后容易主汽压力出现过调现象;反之,如果R1过小而S1过大,则会使预给煤作用不明显,从而不能有效起到克服锅炉迟滞的作用。是当升(降)负荷信号将要结束时,控制算法自动预先减掉或加入一定若干煤量(复位冲量)的计算值。下面以升负荷为例,描述算法复位冲量的计算过程,复位冲量的计算比较复杂,涉及到复位冲量的动作时间、脉冲宽度及脉冲幅度三个方面。f9(x)根据机前压力控制偏差折算出相应的负荷偏差信号,并叠加到负荷控制偏差上,计算值作为函数的f6(x)输入值,f6(x)计算出燃料量复位冲量信号幅度R2(降负荷过程则由f7(x)决定)。控制算法中的函数f4(x)负责计算复位冲量脉冲时间宽度S2,即燃料量复位冲量信号的持续时间(降负荷过程则由f3(x)决定)。复位冲量的动作时间由函数f1(x)和f2(x)根据负荷变化梯度值计算,f1(x)负责计算升负荷过程时的动作时间(f2(x)负责计算升负荷过程时的动作时间)。f1(x)参数设置的原则是根据变负荷幅度确定合适的复位动作时刻,负荷变化幅度越大,函数输出值越大。复位冲量与正向冲量呈现对偶特性,目的是减少变负荷结束后主汽压力过渡过程时间,防止出现主汽压力超调过大,保证控制过程快速收敛。
本发明的核心思想是预给煤内模控制算法及本算法的调试方法相结合,在现场调试过程简单,参数设计模型化,便于工程实现。
预给煤算法整定参数的主要约束条件包括:机组子系统送风、负压、给水对预给煤正向冲量、复位冲量幅度值的承受能力,及其两个变量对磨煤机、给煤机、送风机、引风机和给水泵等辅机设备的出力与运行方式的影响。预给煤算法中的“正向冲量”和“复位冲量”的脉冲宽度时间应对下一个变负荷指令周期的影响,变负荷过程结束后过渡过程时间的影响等。
预给煤算法设计中需要整定的参数:预给煤正向冲量动作时刻;预给煤正向冲量幅度值;预给煤正向冲量脉冲宽度时间;预给煤复位冲量动作时刻;预给煤复位冲量幅度值;预给煤复位冲量脉冲宽度时间。
下面以300MW汽包炉为例,介绍算法参数整定结果,如表1所示。
机组概况:燃煤凝汽式机组,机组主机设备:锅炉、汽机和发电机为哈尔滨三大主机厂生产。锅炉为亚临界,自然循环,中间再热汽包炉,制粉系统采用5台正压直吹式中速磨系统,一次风送粉;燃烧为单炉膛四角切圆燃烧,燃烧器布置有五层煤粉,两层油。点火方式采用蒸汽雾化二级点火(点火器点轻柴油,轻柴油点燃煤粉),汽机为单轴,双缸双排汽,中间再热凝汽式。发电机为水氢氢冷却方式。主蒸汽和主给水系统为单元制热力系统。设有2×50%B-MCR容量的汽动给水泵和1×50%B-MCR容量电动调速给水泵作为启动备用泵,旁路系统设有35%B-MCR容量的高,低压串级旁路。回热抽汽系统由3台高加,1台除氧器,4台低加组成。控制系统采用OVATION分散型控制系统。
表1中与f1(x)、f2(x)对应的x为LDC1(MW),即负荷变化梯度值;f1(x)、f2(x)为执行“复位冲量”动作的高/低限域值,当变负荷过程接近尾声时,控制算法的复位冲量开始动作;与f3(x)、f4(x)、f5(x)对应的x为LDC2,即负荷变化梯度的存储记忆值;f3(x)为降负荷时“复位冲量”信号的持续时间,f4(x)为升负荷时“复位冲量”信号的持续时间;f5(x)为预给煤信号的持续时间;与f6(x)、f7(x)对应的x为LDC与实际负荷的偏差加上机前压力偏差的负荷当量修正值,f6(x)为升负荷时“复位冲量”信号的作用幅度,f7(x)为为降负荷时“复位冲量”信号的作用幅度;与f9(x)对应的x为机前压力偏差,f9(x)为负荷当量修正值;与f10(x)对应的x为目标负荷与实际负荷的偏差,f10(x)为炉侧控制量的分量之一即“正向冲量”动作的大小。
控制算法参数整定方法是建立在对机组历史数据分析分析的基础上,通过对机组稳态工况时的负荷、燃料量、给水流量、主汽温度等参数进行统计,并求出各个参数的数学期望值,求出燃料负荷比、燃水比
作为f6(x)、f7(x)、f9(x)、f10(x)的整定依据;通过对机组变负荷工况的负荷、燃料量、给水流量、主汽温度等参数进行统计,并求出各个参数的数学期望值,作为f1(x)、f2(x)、f3(x)、f4(x)、f5(x)的整定依据。
表1预给煤控制算法整定参数表
基于预给煤控制模型的协调控制系统参数动态整定方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0