









专利摘要
本发明涉及集成电路设计验证领域,特别是一种寄存器传输级可观测性覆盖分析与激励生成方法。通过增强型进程控制树、控制-观测链等数据模型表征可观测性信息,在此基础上,通过对设计电路动态执行过程中,每个观测点的控制-观测链的确定与回退,分析语句与变量的可观测性,得到可观测性语句覆盖率,并且利用得到的可观测性信息指导激励生成。本发明解决了目前已有的可观测性覆盖评估方法复杂度高以及在激励生成过程中不考虑可观测性的问题。生成。本发明可用于在模拟过程中计算代码的可观测性语句覆盖率,进而更确切地评估验证的力度,也可以用于在激励生成过程中以可观测性覆盖信息为指导,提高激励的质量。
权利要求
1.一种寄存器传输级可观测性覆盖分析与激励生成方法,其特征在于,通过增强型进程控制树、控制-观测链等数据模型表征可观测性信息,在此基础上,通过对设计电路动态执行过程中,每个观测点的控制-观测链的确定与回退,分析语句与变量的可观测性,得到可观测性语句覆盖率,并且利用得到的可观测性信息指导激励生成。
2.根据权利要求1所述的寄存器传输级可观测性覆盖分析与激励生成方法,其特征在于,对进程控制树进行扩充,来表征每一时间帧语句的执行情况,以及截止到该时间帧,语句的可观测性情况,其具体做法是在进程控制树中加入以下两个域:
(1)obv域:可观测性语句标识域;该域只针对于赋值语句,用来标识该语句的执行错误是否可以被验证者观测到;
(2)active域:语句动态执行标识域;该域只针对于赋值语句,采用该域记录设计电路在某一时间帧中,哪些语句是被执行的,该域的值在每一时间帧都动态刷新。
3.根据权利要求1所述的寄存器传输级可观测性覆盖分析与激励生成方法,其特征在于,采用控制-观测链来记录在具体每一时间帧扩展过程中,变量以及语句的可观测性信息,具体来说,一个变量v,在某一时间帧t的控制-观测链就是由所有在时间帧t,对v的取值产生影响的赋值关系所形成的集合。
4.根据权利要求1所述的寄存器传输级可观测性覆盖分析与激励生成方法,其特征在于,可观测性信息分析方法由以下具体步骤组成:
步骤1:向量模拟,这是一个从输入到输出的“正向”过程,该阶段的主要工作是刷新增强型进程控制树中active域的值,并判断在具体某一时间帧的执行当中,哪些数据迁移是具体执行的,进而确定
在该时间帧,每一个观测点的控制-观测链;
步骤2:可观测性分析,这是一个从观测点出发,“反向”分析控制-观测链,进而判断变量以及语句可观测性的过程。
5.根据权利要求1所述的寄存器传输级可观测性覆盖分析与激励生成方法,其特征在于,采用变量的赋值和引用作为可观测性分析的基础,可以很容易地与其它考虑可控制性的覆盖准则相结合,其与语句覆盖评估准则相结合,得到可观测性语句覆盖率,其具体方法是当一组向量模拟结束时,统计在增强型进程控制树中,obv域的取值为1的节点数目,其与总的赋值语句数目的比值就是可观测性语句覆盖率。
6.根据权利要求1所述的寄存器传输级可观测性覆盖分析与激励生成方法,其特征在于,以可观测性语句的覆盖分布情况为启发式信息的激励生成算法,这是一种基于模拟的算法,在模拟的开始阶段,不指定模拟激励的值,当执行到设计的一条语句时,对其类型进行判断:如果遇到赋值语句,则执行赋值操作;如果遇到条件分支语句,则比较不同分支下的可观测性语句覆盖分布情况,进而决定该算法下一步执行方向,在该过程中会指定全部或者部分输入位的值,最后对于经过以上操作,没有被赋值的输入位,指派一个随机值,这样得到一个模拟激励。
7.根据权利要求1所述的寄存器传输级可观测性覆盖分析与激励生成方法,其具体步骤如下:
步骤S1,抽象电路设计的寄存器传输级代码,得到抽象结构:进程控制树与数据流向图;
步骤S2,对进程控制树结构进行扩充,加入可观测性语句标识域与语句动态执行标识域,得到增强型进程控制树,并建立控制-观测链结构用于分析电路在每一时间帧动态执行过程中的可观测性信息;
步骤S3,以目前可观测性语句的覆盖分布情况作为启发式信息产生模拟激励T;
步骤S4,以步骤S3所得到的激励T作为输入,对电路进行模拟,得到可观测性语句覆盖率以及相应的分布信息;
步骤S5,如果目前所得到的可观测性语句的覆盖率已经达到设计验证者的目标,或者算法运行超时,则算法结束;反之,转至步骤S3。
说明书
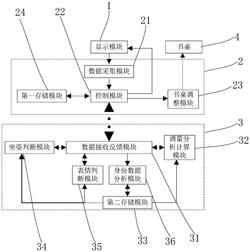
技术领域技术领域
本发明涉及集成电路设计验证领域,特别是一种寄存器传输级可观测性覆盖分析与激励生成方法,是在模拟验证中更确切地评估以及提高验证力度的方法。
技术背景背景技术
可观测性的概念起源于生产测试,它用来表征电路内部逻辑信号的错误是否可以反映到电路的输出。在模拟验证中,硬件设计是在软件模拟器上运行的,在各时刻的变量取值实际上是可知的。但是随着设计规模的扩大,了解设计中所有变量的正确行为,其数据量之大,对于验证工程师来说几乎是不现实的。另外,硬件设计在模拟过程中,其变量的状态通常是一串0、1序列,可读性差。所以,在模拟验证中考虑设计的可观测性就非常必要了。
鉴于此,可观测性覆盖评估准则被提了出来,它是一种从行为角度对模拟激励进行评估的准则,是对传统覆盖准则的增强。传统的覆盖准则只考虑代码的可控制性,忽略其可观测性,即这些准则保证了代码会执行,但其执行错误并不一定可以反映到验证者所选定的观测点上。这可能导致表面上很高的覆盖率数据所蕴含的可信度不高。以语句覆盖准则为例,采用该准则,通常很容易达到很高的覆盖率,甚至100%;而可观测性语句覆盖率并不像前者那样过于乐观,它不仅评估每条语句是否被执行,而且检验被激励激活的那些潜在错误的影响是否可以传播到观测点,该准则可以更确切地评估验证的力度。
然而,目前已经提出的可观测性覆盖分析方法,通常存在计算复杂度高,时间开销大的问题。同时,在激励生成过程中,通常不考虑可观测性,这样所产生的模拟激励的验证力度不够。存在这些问题的原因,一方面是缺乏简洁合理的可观测性信息分析模型,另一方面是由于可观测性分析方法复杂,这导致其很难应用于实际的设计验证流程。
寄存器传输级(RTL)描述是介于逻辑级与算法级之间的一种描述级别。相比较而言,RTL描述较逻辑级描述更简单明了,缩小了电路描述规模;而较算法级描述能更好地表征电路特性(如时钟信息),并且易于综合,因此RTL描述成为目前应用最广泛的电路设计描述形式。中国科学院的尹志刚博士等人采用进程控制树(PCT)、数据流向图(DDG)以及定义行为图(DBG)来抽象RTL描述。其中进程控制树反映了进程的控制结构,数据流向图反映了数据之间的流动关系,定义行为图则体现了控制流与数据流的结合。其具体方法可参考下列文献:
“A Novel RTL Behavioral Description Based ATPG Method”,by YINZhiGang,MIN YingHua,LI XiaoWei and LI HuaWei,Published in Journal ofComputer Science and Technology,May 2003,Vol.18,No.3,pp.308-317.
发明内容发明内容
本发明针对目前可观测性覆盖评估算法复杂度过高,时间开销过大,在实际设计验证流程中难以应用的问题,提出解决方案。
本发明目的之一是提供一种简洁合理的表征方式来刻画电路RTL设计的可观测性信息。
本发明目的之二是提供一种高效的可观测性信息分析方法。
本发明目的之三是提供一种高效的可观测性语句覆盖评估算法。
本发明目的之四是为模拟激励的生成提供可观测性信息,作为启发式度量标准,来指导激励生成,提高验证的力度。
为实现上述目的,本发明包含以下内容:
(1)本发明提出一种可观测性信息表征方式。本发明对传统的进程控制树(PCT)结构进行扩充,提出了增强型进程控制树(EPCT)结构。该结构可以在刻画进程的控制关系的同时,记录在任一时间帧语句的执行情况,以及电路在若干时间帧执行以后,每一条语句的可观测性信息。同时本发明提出了控制-观测链(COC)结构用于分析电路在每一时间帧动态执行过程中的可观测性信息。
(2)本发明提出一种可观测性信息分析方法。该方法可以划分为两个阶段,第一个阶段是模拟阶段,这是一个从输入到输出的“正向”过程,其主要目的在于确定每一个观测点的控制-观测链;第二个阶段是可观测性分析阶段,这是一个从观测点出发,“反向”分析控制-观测链,进而判断变量与语句可观测性的过程。
(3)本发明将可观测性分析方法与语句覆盖准则相结合,提出可观测性语句覆盖率的计算方法。
(4)本发明将可观测性覆盖分析所得到的信息,应用于模拟激励生成,提高了激励的质量与验证的力度。
技术方案
寄存器传输级可观测性覆盖分析与激励生成方法,通过增强型进程控制树、控制-观测链等数据模型表征可观测性信息,在此基础上,通过对设计电路动态执行过程中,每个观测点的控制-观测链的确定与回退,分析语句与变量的可观测性,得到可观测性语句覆盖率,并且利用得到的可观测性信息指导激励生成。
寄存器传输级可观测性覆盖分析与激励生成方法,采用控制-观测链来记录在具体每一时间帧扩展过程中,变量以及语句的可观测性信息,具体来说,一个变量v,在某一时间帧t的控制-观测链就是由所有在时间帧t,对v的取值产生影响的赋值关系所形成的集合。
寄存器传输级可观测性覆盖分析与激励生成方法,采用变量的赋值和引用作为可观测性分析的基础,可以很容易地与其它考虑可控制性的覆盖准则相结合,其与语句覆盖评估准则相结合,得到可观测性语句覆盖率,其具体方法是当一组向量模拟结束时,统计在增强型进程控制树中,obv域的取值为1的节点数目,其与总的赋值语句数目的比值就是可观测性语句覆盖率。
寄存器传输级可观测性覆盖分析与激励生成方法,以可观测性语句的覆盖分布情况为启发式信息的激励生成算法,这是一种基于模拟的算法,在模拟的开始阶段,不指定模拟激励的值,当执行到设计的一条语句时,对其类型进行判断:如果遇到赋值语句,则执行赋值操作;如果遇到条件分支语句,则比较不同分支下的可观测性语句覆盖分布情况,进而决定该算法下一步执行方向,在该过程中会指定全部或者部分输入位的值,最后对于经过以上操作,没有被赋值的输入位,指派一个随机值,这样得到一个模拟激励。
本发明首先对进程控制树(PCT)进行扩充,提出增强型进程控制树(EPCT)。简单而言,对PCT的扩充方法是在PCT的每一个节点(对应一条HDL语句)中加入两个域:
obv域:可观测性语句标识域。该域只针对于赋值语句,用来标识该语句的执行错误是否可以被验证者观测到。其取值为0,表示该赋值语句是没有被观测到的;其取值为1,表示该赋值语句是可观测的。
active域:语句动态执行标识域。该域只针对于赋值语句,由于编译阶段无法得到程序动态执行的信息,我们采用该域纪录在程序的每一时间帧的具体执行过程中,哪些语句是被执行的。在某一时间帧t,其取值为1,表示该语句在时间帧t是被执行的;其取值为0,表示该语句在时间帧t没有执行。该域的取值在每一时间帧都要动态刷新。
增强型进程控制树(EPCT)的递归表示形式为:EPCT=<C,EPCTthen,EPCTelse,EPCTnext,Attrs>。其中C表示当前语句,EPCTthen,EPCTelse,EPCTnext表示不同分支下的子树。当C为赋值语句时,EPCTthen与EPCTelse为空,EPCTnext表示以语句C的后继为根节点的增强型进程控制树。当C为条件赋值语句时,EPCTthen与EPCTelse分别表示then分支与else分支语句组的增强型进程控制树,同时EPCTnext表示以条件分支的后继语句为根节点的增强型进程控制树。Attrs表示所添加的obv域以及active域。需要注意的是,针对RTL代码中的case语句,在编译阶段,已经转化成if-else语句,同时循环语句也已经展开。所以,可以采用上述方式,刻画RTL描述。
一段VHDL代码与其对应的增强型进程控制树(EPCT)与数据流向图(DDG)如图1所示,其中的虚线表示EPCT与DDG的对应关系。一条VHDL语句对应于EPCT中的一个节点,同时在DDG中有其对应的数据传输边。
EPCT结构中的obv域可以记录电路在若干时间帧执行以后,每一条语句的可观测性信息,但无法记录在具体每一时间帧扩展过程中,变量以及语句的可观测性信息。为了清晰地表征在程序动态执行过程中,数据的依赖关系并分析可观测性,我们引入以下定义:
定义1:在DDG中,每一个节点p代表HDL中一个变量或表达式,针对某段代码C,其所有变量或表达式在DDG中对应节点的集合,我们称之为代码C所对应DDG的节点集,并用P(C)来表示。即P(C)={p|p为代码C所对应DDG中的节点}。
定义2:在代码C中对变量(包括输出)的一次赋值,叫做一次数据迁移,每个数据迁移在DDG中都有其对应的边;一个数据迁移tf可以表示为tf=<s,e>,其中s与e分别表示tf的源点与终点;代码C中所有数据迁移的集合,表示成TF(C)。即TF(C)={<s,e>|<s,e>为代码C所对应DDG中的数据迁移}。
定义3:在时间帧t,代码C所对应的某些数据迁移是被执行的,某些数据迁移是没有被执行的,我们将被执行的数据迁移称为活动的数据迁移;没有被执行的数据迁移,称为非活动的数据迁移;所有活动的数据迁移构成的集合表示为ATF(C,t)。即ATF(C,t)={<s,e>|(<s,e>∈TF(C))∧(<s,e>在时间帧t被执行)}。
定义4:在时间帧t,针对代码C中的某一变量v,所有对其产生影响的赋值关系所形成的活动的数据迁移的集合,称为变量v在时间帧t的控制-观测链,表示为COC(C,v,t),其形式化定义如下:
根据上述定义,在图2中,DDG的节点集合P(C)={rst,clk,in1,in2,0,1,buf1,buf2,+,buf3,buf4,up event,=,condition,o1,o2}。在时间帧t,假设(rst!=1),则{tf2,tf3}为非活动的数据迁移(即在该时间帧,语句2、3未执行),{tf5,tf6,tf7_l,tf7_r,tf7,tf8,tf9,tf10}为活动的数据迁移(即在该时间帧,语句5-10被执行),则根据定义4,变量buf3在该时间帧的控制-观测链为COC(C,buf3,t)={tf5,tf6,tf7_l,tf7_r,tf7。需要注意的是针对RTL代码中的非阻塞性赋值,其取值涉及前一帧,如图2中的语句8,要为buf4赋t-1帧中buf3的值,所以其控制-观测链也要涉及前一帧的取值。如果一条赋值语句存在错误,则其错误的取值,将决定该错误是否可以传播到赋值目标。假设存在一条赋值语句:f:=a>(b+c),在执行过程中,其正确的取值应该为:<a=4,b=2,c=1>。这时如果a的取值发生错误,当a取大于4的值时,该错误无法传播到赋值目标f;当a取小于4的值时,该错误可以传播到赋值目标f。
本发明假设所有赋值语句的错误,其取值都可以传播到赋值目标。
基于上述数据模型以及假设,我们对变量以及赋值语句的可观测性
给出如下定义:
定义5:某段代码C中的可观测点(Observable Points,记做OP)的集合OPS(C)定义为:
(1)针对代码C,被验证者选来观察程序行为的变量v,是观测点(Observed Point,记做OdP)。OdP的集合记做OdPS(C),显然OdPS(C)OPS(C)。
(2) 满足以下性质的变量w,在时间帧t是可以被观测的,
并且我们将对可观测点赋值的语句称为可观测性赋值语句(ObservableStatements,记做OS);显然OPS(C,t)OPS(C)。
从一定意义上讲,可观测性就是内部变量和观测点之间的数据依赖关系的体现。基于以上提出的数据模型及相关定义,下面给出一种可观测性分析方法。
在进行可观测性分析前,首先要对RTL代码进行编译,得到PCT与DDG结构,并对PCT进行扩充,增加obv与active域,然后初始化这两个域的值。针对赋值语句,这两个域初始化都取0值,并且其取值会在可观测性分析过程中,不断刷新。针对条件分支语句,这两个域的值为空。通过上述操作,我们就得到了增强型进程控制树(EPCT)。
上述初始化工作完成后,进行可观测性分析,该分析过程可以划分为两个阶段,第一个阶段是模拟阶段,这是一个从输入到输出的“正向”过程,该阶段的主要工作是刷新EPCT中active域的值,判断在当前时间帧DDG中每一个数据迁移是否活动,进而确定在该时间帧,每一个观测点的控制-观测链;第二个阶段是可观测性分析阶段,这是一个从观测点出发,“反向”分析控制-观测链,判断代码可观测性的过程。其算法过程如下所示:
Analyze(C,vector,t)
//代码C,在时间帧t,模拟向量vector,分析可观测性;
{
//阶段1:向量模拟阶段;
模拟向量vector;
将该时间帧具体被执行的语句所对应的EPCT中active域的取值置为1;
通过EPCT与DDG的对应关系,判断DDG中哪些数据传输是活动的;
进而确定每一个观测点的控制-观测链;
//阶段2:可观测性分析阶段;
for all v∈OdPS(C)
for all a_t∈COC(C,v,t)
将a_t所对应的EPCT中相应节点的obv域取值刷新为1;
}
采用上述算法,当一组向量模拟结束时,语句的可观测性信息就已经得到了。这时统计EPCT中obv域的取值为1的节点数目,其与总的赋值语句数目的比值就是可观测性语句覆盖率。
本发明所提出的可观测性评估方法采用变量的赋值和引用作为可观测性分析的基础,可以很容易地与其它考虑可控制性的覆盖准则相结合。同时采用本发明所得到的可观测性覆盖信息,可以作为重要的启发式信息指导RTL激励生成。
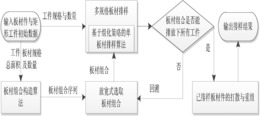
本发明提出一种基于模拟的,以可观测性语句覆盖分布为启发式信息的激励生成算法。在模拟的开始阶段,不指定模拟激励的值,其输入的所有位均置为不确定位。 当模拟执行到RTL设计的一条语句时,对其类型进行判断。如果遇到赋值语句,则执行赋值操作。如果遇到条件分支语句,则判断不同分支下未观测语句的分布情况,进而决定该算法下一步执行方向。其具体算法如下:
Engine(EPCT) /*EPCT=<C,EPCTthen,EPCTelse,EPCTnext,Attrs>;*/
{
步骤1.如果EPCT为空,算法结束;
步骤2.如果当前语句C为赋值语句,则执行该赋值语句,然后算法转至步骤5;否则该语句一定是条件分支语句,转至步骤3;
步骤3.如果then分支下,未观测到的语句多,我们认为算法沿该分支执行,会更有利于观测到目前尚未观测到的语句,这时算法提出沿该分支执行的请求。如果请求没有冲突,则算法沿then分支递归执行Engine(EPCTthen),如果存在冲突,则沿else分支递归执行Engine(EPCTelse)。算法转至步骤5。
步骤4.如果else分支下,未观测到的语句多,与步骤3的处理过程类似,提出沿else分支执行的请求,如果满足,则递归执行Engine(EPCTelse),反之递归执行Engine(EPCTthen)。算法转至步骤5。
步骤5.递归执行Engine(EPCTnext);
}
在上述算法执行过程中,通过对某些变量值的请求,将指定输入激励全部或者部分位的取值。对于经过以上操作,没有被赋值的输入位,指派一个随机值。这样,在每一时间帧,将产生一个模拟激励。采用该方式得到的模拟激励可以使设计错误尽可能地展现在设计验证者所选定的观测点上,提高设计验证的力度。
本发明解决了目前已有的可观测性覆盖评估方法复杂度高以及在激励生成过程中不考虑可观测性的问题。本发明首先针对可观测性信息提出一种表征方式,并在此基础上提出可观测性覆盖分析方法。提出的表征方式与分析方法简洁合理,易于实现。本发明将该分析方法与语句覆盖评估准则相结合,提出计算可观测性语句覆盖率的方法,并将所得到的可观测性覆盖信息用于指导寄存器传输级激励生成。本发明可用于在模拟过程中计算代码的可观测性语句覆盖率,进而更确切地评估验证的力度,也可以用于在激励生成过程中以可观测性覆盖信息为指导,提高激励的质量。
附图说明附图说明
图1是VHDL代码与其对应的EPCT与DDG示意图。
图2是可观测性分析示意图。
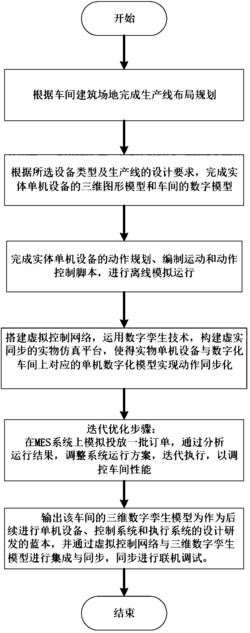
图3是寄存器传输级可观测性覆盖分析与激励生成方法流程图。
具体实施方式具体实施方式
图1是一段VHDL代码与其对应的EPCT与DDG示意图,电路RTL设计的每一条语句在EPCT中都有其对应的节点,同时在DDG中都有其对应的数据传输边,EPCT与DDG之间的虚线,表示同一条语句所对应的EPCT与DDG的对应关系。通过该图可以清晰看出,本发明在PCT中加入obv域与active域来表征截止到当前时间帧对应语句是否可观测,以及在当前时间帧对应语句是否被执行到。图1中的第一条语句是条件判断语句,所以obv域与active域都为空;第二、三条语句obv域与active域取值为0,表示截止到目前时间帧,这两条语句还不可观测,同时在当前时间帧这两条语句没有被执行。
图2中,左边部分显示了一段VHDL代码,中间部分是这段代码所对应的EPCT结构,右边部分是这段代码所对应的DDG。
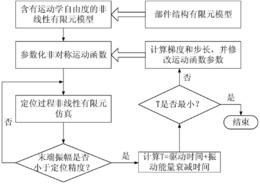
图3的寄存器传输级可观测性覆盖分析与激励生成方法,其具体步骤如下:
步骤S1,对电路设计的寄存器传输级代码进行抽象,得到抽象结构:进程控制树(PCT)与数据流向图(DDG);
步骤S2,对进程控制树(PCT)进行扩充,加入可观测性语句标识域(obv)与语句动态执行标识域(active),得到增强型进程控制树(EPCT),并建立控制-观测链(COC)结构用于分析电路在每一时间帧动态执行过程中的可观测性信息;
步骤S3,以目前可观测性语句的覆盖分布情况作为启发式信息,产生模拟激励T;
(1)这是一种基于模拟的方法,在模拟的开始阶段,不指定模拟激励的值,其输入的所有位均置为X。
(2)当执行到设计的一条语句时,对其类型进行判断。如果遇到赋产值语句,则执行赋值操作。如果遇到条件分支语句,则判断不同分支下未观测语句的分布情况,进而决定该算法下一步执行方向。假设EPCTthen分支下未观测到的语句的数目大于EPCTelse分支下未观测到的语句的数目,我们认为算法沿EPCTthen分支执行,可能会覆盖到更多的未观测语句。反之,我们认为沿EPCTelse分支执行,可能会覆盖到更多的未观测语句。这时,我们提出沿相应分支执行的请求,进行请求响应处理。在该过程中,通过对某些变量值的请求,将指定输入激励全部或者部分位的取值。
(3)对于经过以上操作,没有被赋值的输入位,指派一个随机值。这样,在每一时间帧,将产生一个模拟激励。
步骤S4,以步骤S3所得到的激励T作为输入对电路进行模拟,得到可观测性语句的覆盖率以及相应的分布信息;
(1)以激励T作为输入对电路进行模拟,将该时间帧具体被执行的语句所对应的EPCT中节点的active域的取值置为1;通过EPCT与DDG的对应关系,判断DDG中哪些数据传输是活动的;进而确定每一个观测点的控制-观测链;
(2)从每一个观测点出发,分析其控制-观测链,判断语句的可观测性,进而刷新其对应的EPCT中节点的obv域的取值;
步骤S5,如果目前所得到的可观测性语句的覆盖率已经达到设计验证者的目标,或者算法运行超时,则算法结束;反之,转至步骤S3。
一种寄存器传输级可观测性覆盖分析与激励生成方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0