








专利摘要
本发明公开了一种多级噪声整形数字Delta‑Sigma调制器的外加扰动信号的添加方法,包括多级调制器,在第一级调制器中加入扰动信号,扰动信号取反后和第一级调制器的量化误差信号相加,然后经过延迟寄存器延迟后再馈送到第一级调制器的输入端,与输入信号一起经过量化处理后,再与经过增益处理的扰动信号相加,最后作为第一级调制器的输出被送入误差消除逻辑电路。本发明将外加扰动信号添加到数字Delta‑Sigma调制器,能有效延长其输出序列长度并实现扰动信号的相互抵消,最终外加的扰动信号不会出现在调制器量化噪声功率谱中,能有效提高采用随机扰动法的多级噪声整形数字Delta‑Sigma调制器的输出信噪比。
权利要求
1.一种多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,包括多级调制器,其特征在于,在第一级调制器或第二级调制器中加入扰动信号;
在第一级调制器中加入扰动信号具体为:扰动信号取反后和第一级调制器的量化误差信号相加,然后经过延迟寄存器延迟后再馈送到第一级调制器的输入端,与输入信号一起经过量化处理后,再与经过增益处理的扰动信号相加,最后作为第一级调制器的输出被送入误差消除逻辑电路;
在第二级调制器中加入扰动信号具体为:扰动信号取反后和第二级调制器的量化误差信号相加,然后经过延迟寄存器延迟后再馈送到第二级调制器的输入端,与第一级调制器的量化误差信号相加后作为输入信号被送入第二级调制器进行量化处理,然后与经过增益处理的扰动信号相加,最后作为第二级调制器的输出被送入误差消除逻辑电路。
2.根据权利要求1所述的多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,其特征在于,在第一级调制器中加入扰动信号时:在第二级调制器中,扰动信号取反后和第一级调制器的量化误差信号一起进入加法器,并与经过延迟后的第二级量化误差信号共同作为第二级调制器的输入信号,再经过量化处理后作为第二级调制器的输出被送入误差消除逻辑电路。
3.根据权利要求1所述的多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,其特征在于,在第一级调制器中加入扰动信号时:在第三级调制器中,第二级调制器的量化误差信号与延迟后的第三级量化误差信号共同作为第三级调制器的输入信号,再经过量化处理后作为第三级调制器的输出被送入误差消除逻辑电路。
4.根据权利要求1所述的多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,其特征在于,所述多级调制器为三阶噪声整形数字Delta-Sigma调制器。
5.根据权利要求4所述的多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,其特征在于,在第一级调制器中加入扰动信号时:所述误差消除逻辑电路具体为:第三级调制器的输出信号经过延迟后取反,再与第三级调制器的输出信号、第二级调制器的输出信号一起进入第二级的加法器,第二级加法器的输出信号经延迟后取反,再与第二级加法器的输出信号、第一级调制器的输出信号一起进入第一级的加法器,第一级加法器的输出作为误差消除逻辑电路的输出信号。
6.根据权利要求5所述的多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,其特征在于,在第一级调制器中加入扰动信号时:所述第一级调制器的输出为:
第二级调制器的输出为:
第三级调制器的输出为:
误差消除逻辑电路的输出为:
其中, 和 分别是输入信号 和输出信号 的Z变换; 和 分别是第i级误差反馈调制器的量化误差 和输出信号 的Z域表达式; 为外加扰动信号 的Z域表达式;M为量化器的量化间隔;
输入输出函数为: 。
7.根据权利要求1所述的多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,其特征在于,在第二级调制器中加入扰动信号时:在第三级调制器中,扰动信号取反后和第二级调制器的量化误差信号一起进入加法器,并与延迟后的第三级量化误差信号共同作为第三级调制器的输入信号,再经过量化处理后作为第三级调制器的输出被送入误差消除逻辑电路。
8.根据权利要求4所述的多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,其特征在于,在第一级调制器中加入扰动信号时:所述误差消除逻辑电路具体为:第三级调制器的输出信号经过延迟后取反,再与第三级调制器的输出信号、第二级调制器的输出信号一起进入第二级的加法器,第二级加法器的输出信号经延迟后取反,再与第二级加法器的输出信号、第一级调制器的输出信号一起进入第一级的加法器,第一级加法器的输出作为误差消除逻辑电路的输出信号。
9.根据权利要求8所述的多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,其特征在于,在第二级调制器中加入扰动信号时:所述第一级调制器的输出为:
第二级调制器的输出为:
第三级调制器的输出为:
误差消除逻辑电路的输出为:
其中, 和 分别是输入信号 和输出信号 的Z变换; 和 分别是第i级误差反馈调制器的量化误差 和输出信号 的Z域表达式; 为外加扰动信号 的Z域表达式;M为量化器的量化间隔;
输入输出函数为: 。
说明书
技术领域
本发明涉及信号处理,尤其是一种多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法。
背景技术
在当今的数字通信系统中,由于奈奎斯特采样技术容易受到元件匹配、电路的非理想性以及大功率量化噪声干扰等的影响,而逐渐被过采样技术所取代。过采样是指使用频率远高于奈奎斯特频率的频率对输入信号进行采样。由于量化比特的位数保持不变,故总的量化噪声功率保持不变,但量化噪声的功率由于采样频率的提高而分布到更多的频点,因此相应的信号带内的量化噪声功率谱密度减小,进而提高通信系统的信噪比(SNR,Signal to Noise Ration)。但是,单独使用过采样技术对信噪比的性能提升并不是很明显,所以,过采样技术还常常结合噪声整形技术一起使用。因此,同时具有过采样和噪声整形能力的DDSM(数字Delta-Sigma调制器,Digital Delta-Sigma Modulator),被广泛地应用于当今的无线通信系统中,以满足飞速发展的通信系统对高带宽、高速率和高分辨率等性能指标的需求。
在过采样频率下,DDSM采样高精度的输入信号,输出低精度的输出信号。在该过程中,DDSM将低频段的量化噪声推移到高频段,并且将有用的输入信息保留在低频带,从而实现了高通特性的噪声整形,最后高频段的量化噪声可以通过后面的低通滤波器滤除。高通滤波器的阶数越高,噪声整形特性越好,但是对于单环结构的DDSM,当调制器的阶数变高后,系统变得越来越不稳定。而多级噪声整形结构的DDSM由于具有极佳的系统稳定性而受到研究者更多的青睐。
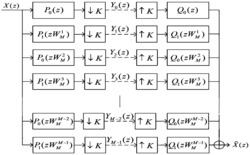
图1是经典的l阶的MASH(MASH,Multi-stAge Noise Shapping)DDSM的电路框图,由图1可以看出经典MASH DDSM由多个一阶的误差反馈调制器(EFM,Error Feedback Modulation)级联构成,前一级误差反馈调制器把量化误差信号传入下一级误差反馈调制器作为输入,并且各级误差反馈调制器都将输出信号送入误差消除逻辑(ECL,Error Cancellation Logic)电路中,以抵消中间级误差反馈调制器的量化噪声,从而使得输出频谱中只包含输入信号和高阶整形后的最后一级误差反馈调制器的量化噪声。
但是,由于DDSM是一个有限状态机,在恒定输入情况下,DDSM的输出呈现出很强的周期性。更为糟糕的是其输出周期的长度还严重受到输入值和初始条件设置的影响。当DDSM的输入和初始条件设置不恰当时,其输出序列的周期变得很短,量化噪声功率只能分布到极少数的频点上,导致调制器的输出频谱出现明显的大功率杂散成分,严重恶化了通信系统的输出信噪比。
因此,为有效提高DDSM的输出序列长度,业界提出了两类主流的方法:确定性(Deterministic)法和随机扰动(Dithering)法。其中确定性法通过改变调制器结构或设置合理的寄存器初始值,来有效增加输出序列的周期长度;而随机扰动法通过外加随机扰动信号给调制器,以打破调制器的输出周期特性,从而有效延长输出序列的周期长度。由于两种方法各有优劣,两者都被广泛应用到实际应用中。在随机扰动法中,外加随机扰动具有近似白噪声的分布特性,按照传统的扰动添加方式,外加的扰动信号先经过扰动滤波器整形,然后送入调制器,但由于扰动整形的滤波器阶数一般不能超过l-2(l是MASH DDSM的调制器阶数),扰动信号最终会在叠加到调制器量化噪声功率谱中,形成底噪,从而在一定程度上恶化调制器的输出信噪比。
发明内容
发明目的:针对上述现有技术存在的缺陷,本发明旨在提供多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法。
技术方案:一种多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,包括多级调制器,在第一级调制器或第二级调制器中加入扰动信号;
在第一级调制器中加入扰动信号具体为:扰动信号取反后和第一级调制器的量化误差信号相加,然后经过延迟寄存器延迟后再馈送到第一级调制器的输入端,与输入信号一起经过量化处理后,再与经过增益处理的扰动信号相加,最后作为第一级调制器的输出被送入误差消除逻辑电路;
在第二级调制器中加入扰动信号具体为:扰动信号取反后和第二级调制器的量化误差信号相加,然后经过延迟寄存器延迟后再馈送到第二级调制器的输入端,与第一级调制器的量化误差信号相加后作为输入信号被送入第二级调制器进行量化处理,然后与经过增益处理的扰动信号相加,最后作为第二级调制器的输出被送入误差消除逻辑电路。
进一步的,在第一级调制器中加入扰动信号时:在第二级调制器中,扰动信号取反后和第一级调制器的量化误差信号一起进入加法器,并与经过延迟后的第二级量化误差信号共同作为第二级调制器的输入信号,再经过量化处理后作为第二级调制器的输出被送入误差消除逻辑电路。
进一步的,在第一级调制器中加入扰动信号时:在第三级调制器中,第二级调制器的量化误差信号与延迟后的第三级量化误差信号共同作为第三级调制器的输入信号,再经过量化处理后作为第三级调制器的输出被送入误差消除逻辑电路。
进一步的,所述多级调制器为三阶噪声整形数字Delta-Sigma调制器。
进一步的,在第一级调制器中加入扰动信号时:所述误差消除逻辑电路具体为:第三级调制器的输出信号经过延迟后取反,再与第三级调制器的输出信号、第二级调制器的输出信号进入加法器,经延迟后取反,再与未经延时取反的信号、第一级调制器的输出信号进入加法器,作为误差消除逻辑电路的输出信号。
进一步的,所述第一级调制器的输出为:
第二级调制器的输出为:
第三级调制器的输出为:
误差消除逻辑电路的输出为:
Y(z)=Y1(z)+Y2(z)(1-z-1)+Y3(z)(1-z-1)2
其中,X(z)和Y(z)分别是输入信号x[n]和输出信号y[n]的Z变换;Ei(z)和Yi(z)分别是第i级误差反馈调制器的量化误差ei[n]和输出信号yi[n]的Z域表达式;D(z)为外加扰动信号d[n]的Z域表达式;M为量化器的量化间隔;
输入输出函数为:
进一步的,在第二级调制器中加入扰动信号时:在第三级调制器中,扰动信号取反后和第二级调制器的量化误差信号一起进入加法器,并与延迟后的第三级量化误差信号共同作为第三级调制器的输入信号,再经过量化处理后作为第三级调制器的输出被送入误差消除逻辑电路。
进一步的,在第二级调制器中加入扰动信号时:误差消除逻辑电路具体为:第三级调制器的输出信号经过延迟后取反,再与第三级调制器的输出信号、第二级调制器的输出信号进入加法器,经延迟后取反,再与未经延时取反的信号、第一级调制器的输出信号进入加法器,作为误差消除逻辑电路的输出信号。
进一步的,所述第一级调制器的输出为:
第二级调制器的输出为:
第三级调制器的输出为:
误差消除逻辑电路的输出为:
Y(z)=Y1(z)+Y2(z)(1-z-1)+Y3(z)(1-z-1)2
其中,X(z)和Y(z)分别是输入信号x[n]和输出信号y[n]的Z变换;Ei(z)和Yi(z)分别是第i级误差反馈调制器的量化误差ei[n]和输出信号yi[n]的Z域表达式;D(z)为外加扰动信号d[n]的Z域表达式;M为量化器的量化间隔;
输入输出函数为:
有益效果:本发明将外加扰动信号添加到DDSM,本发明优先采用具有良好系统稳定性的两级及其以上的多级噪声整形结构,每级电路均由误差反馈调制器构成,并且每一级EFM的输出都被送入误差消除逻辑电路,以消除中间级的量化误差。扰动信号按照不同的注入支路,分别从不同的电路节点注入电路,然后所有的扰动信号被送入ECL电路,能有效延长其输出序列长度并实现扰动信号的相互抵消,最终,外加的扰动信号不会出现在调制器的输出频谱中,因此,本发明能有效提高采用随机扰动法DDSM的输出信噪比。
附图说明
图1为经典的MASH DDSM的方框图;
图2为采用传统扰动信号添加方式的三阶MASH 1-1-1DDSM示意图;
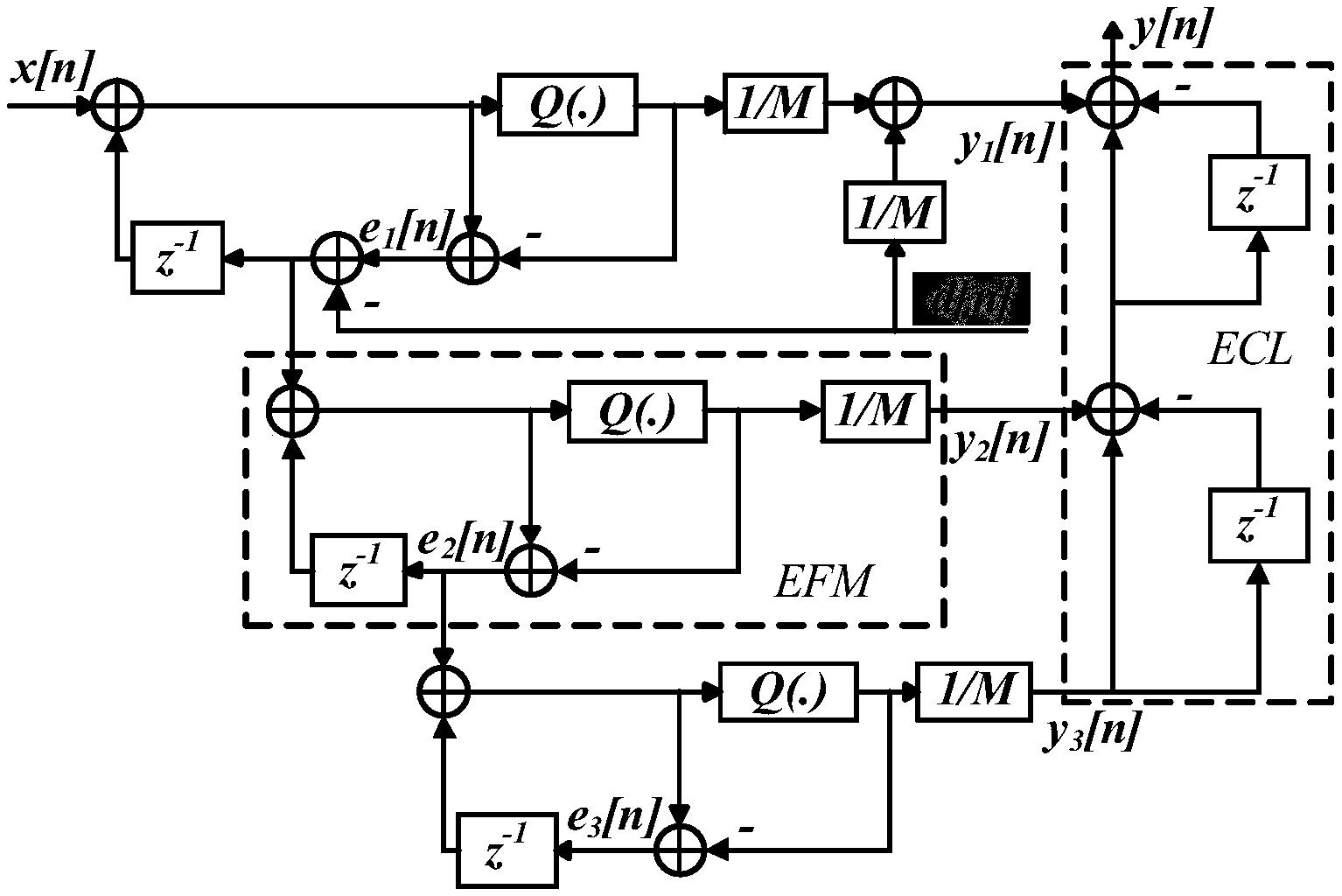
图3为采用本发明提供的扰动信号添加方法的三阶MASH 1-1-1DDSM示意图;
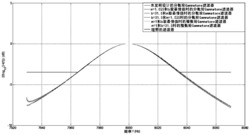
图4为Simulink仿真工具下采用传统扰动添加方式的三阶MASH 1-1-1DDSM的输出功率谱密度图;
图5为Simulink仿真工具下采用本发明提供的扰动信号添加方式的三阶MASH 1-1-1DDSM的输出功率谱密度图;
图6为将本发明提供的扰动信号添加方法应用到三阶MASH 1-1-1DDSM的第二级误差反馈调制器电路的示意图。
具体实施方式
下面通过一个最佳实施例并结合附图对本技术方案进行详细说明。
一种多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法,包括三阶噪声整形数字Delta-Sigma调制器,在第一级调制器中加入扰动信号,具体为:扰动信号取反后和第一级调制器的量化误差信号相加,然后经过延迟寄存器延迟后再馈送到第一级调制器的输入端,与输入信号一起经过量化处理后,再与经过增益处理的扰动信号相加,最后作为第一级调制器的输出被送入误差消除逻辑电路,其中,增益处理即经过一个1/M的增益模块。
在第二级调制器中,扰动信号取反后和第一级调制器的量化误差信号一起进入加法器,并与经过延迟后的第二级量化误差信号共同作为第二级调制器的输入信号,再经过量化处理后作为第二级调制器的输出被送入误差消除逻辑电路。
在第三级调制器中,第二级调制器的量化误差信号与延迟后的第三级量化误差信号共同作为第三级调制器的输入信号,再经过量化处理后作为第三级调制器的输出被送入误差消除逻辑电路。
误差消除逻辑电路具体为:第三级调制器的输出信号经过延迟后取反,再与第三级调制器的输出信号、第二级调制器的输出信号进入加法器,经延迟后取反,再与未经延时取反的信号、第一级调制器的输出信号进入加法器,作为误差消除逻辑电路的输出信号。
如图3所示,由0和1构成的随机序列即外加随机扰动信号可以被同时添加到MASH 1-1-1DDSM的第一级误差反馈调制器电路的两个节点,用于有效延长Delta-Sigma调制器的输出序列长度;
其中,节点一位于第一级误差反馈调制器的反馈回路,并且是在第一级调制器电路和第二级调制器电路的连接节点之前,以保证注入该节点的扰动信号可以进入第二级调制器电路;节点二可以位于第一级误差反馈调制器的输出端;
扰动信号经过取反后直接注入节点一,同时相同的扰动信号经过一个1/M的增益模块后注入节点二;注入节点一的扰动信号,一方面可以经过反馈回路的延迟寄存器延迟一个时钟周期后,反馈回第一级调制器的输入端,接着经过第一级误差反馈调制器的量化处理后和节点二注入的扰动信号一起进入误差消除逻辑电路;另一方面,注入节点一的扰动信号可以和第一级调制器的量化误差信号,一起作为第二级误差反馈调制器的输入信号,经过第二级误差反馈调制器电路量化处理后,也被送入误差消除逻辑电路;
最后,由前后两级误差反馈调制器注入误差消除逻辑电路的扰动信号,在Delta-Sigma调制器输出端实现相互抵消。
因此,按照本发明提供的外加扰动添加方法,结合图3所示,可以写出Z域内各级误差反馈调制器电路和误差消除逻辑电路的输出分别为:
第一级调制器的输出为:
第二级调制器的输出为:
第三级调制器的输出为:
误差消除逻辑电路的输出为:
Y(z)=Y1(z)+Y2(z)(1-z-1)+Y3(z)(1-z-1)2
其中,X(z)和Y(z)分别是输入信号x[n]和输出信号y[n]的Z变换;Ei(z)和Yi(z)分别是第i级误差反馈调制器的量化误差ei[n]和输出信号yi[n]的Z域表达式;D(z)为外加扰动信号d[n]的Z域表达式;M为量化器的量化间隔。
将前三式联合代入第四式可以推导出按照本发明提供的扰动添加方法下的MASH 1-1-1DDSM的输入输出函数为:
由上式可以看出在本发明提供的扰动添加方式下的MASH 1-1-1DDSM的输出频谱中没有包含外加的扰动成分,实现了外加扰动信号的相互抵消,使得输出频谱的低频底噪不会受到外加扰动信号的恶化。
借助Simulink仿真工具,当MASH 1-1-1DDSM的输入采用9-bit表示时,采用传统扰动添加方式的DDSM的输出功率谱密度图如图4所示,从图中可以得出低频段处的噪声功率谱密度约为-120dB/rad/sample,并且低频段输出频谱呈现出约20dB/decade的斜坡;同样条件下,采用本发明提供的扰动信号添加方式的DDSM的输出功率谱密度图如图5所示,从图中可以得出低频段处的噪声功率谱密度约为-175dB/rad/sample,并且低频段输出频谱呈现出约60dB/decade的斜坡。对比图4和图5可以发现,相比传统扰动添加方式,本发明提供的扰动添加方法不仅能有效延长DDSM的输出序列长度,平滑输出频谱,还将DDSM的输出频谱的低频段内的噪声功率谱密度降低了约55dB/rad/sample,因此相同输入条件下,采用本发明提供的扰动添加方法可以有效提高采用随机扰动法DDSM的输出信噪比。
当然,对于多级噪声整形结构,本发明提供的外加扰动信号的添加方法可以被应用到任意前级但非最后一级的误差反馈调制器电路中。
因此,对于三阶的MASH 1-1-1DDSM,由0和1构成的外加随机扰动信号也可以被同时添加到MASH 1-1-1DDSM的第二级误差反馈调制器电路的两个节点。这种情况下的结构示意图如图6所示。
图6所示的是将本发明提供的扰动信号添加方法应用到三阶MASH 1-1-1DDSM的第二级误差反馈调制器电路的示意图;在第一级调制器中,输入信号与第一级的误差反馈信号经延迟后进入加法器,作为第一级调制器的输入信号,再经过量化处理后作为第一级调制器的输出被送入误差消除逻辑电路。
在第二级调制器中加入扰动信号,具体为:扰扰动信号取反后和第二级调制器的量化误差信号相加,然后经过延迟寄存器延迟后再馈送到第二级调制器的输入端,与第一级调制器的量化误差信号相加后作为输入信号被送入第二级调制器进行量化处理,然后与经过增益处理的扰动信号相加,最后作为第二级调制器的输出被送入误差消除逻辑电路。
在第三级调制器中,扰动信号取反后和第二级调制器的量化误差信号一起进入加法器,并与延迟后的第三级量化误差信号共同作为第三级调制器的输入信号,再经过量化处理后作为第三级调制器的输出被送入误差消除逻辑电路。
误差消除逻辑电路具体为:第三级调制器的输出信号经过延迟后取反,再与第三级调制器的输出信号、第二级调制器的输出信号进入加法器,经延迟后取反,再与未经延时取反的信号、第一级调制器的输出信号进入加法器,作为误差消除逻辑电路的输出信号。
其中,节点一位于第二级误差反馈调制器的反馈回路,并且是在第二级调制器电路和第三级调制器电路的连接节点之前,以保证注入该节点的扰动信号可以进入第三级调制器电路;节点二可以位于第二级误差反馈调制器的输出端;
同一扰动信号一方面经过取反后直接注入节点一,另一方面经过一个1/M的增益模块后注入节点二;注入节点一的扰动信号,一方面可以经过反馈回路的延迟寄存器延迟一个时钟周期后,反馈回第二级调制器的输入端,接着经过第二级误差反馈调制器的量化处理后和节点二注入的扰动信号一起进入误差消除逻辑电路;另一方面,注入节点一的扰动信号可以和第二级调制器的量化误差信号,一起作为第三级误差反馈调制器的输入信号,进入第三级误差反馈调制器电路经过量化处理后,也被送入误差消除逻辑电路;
最后,由前后两级误差反馈调制器注入误差消除逻辑电路的扰动信号,在Delta-Sigma调制器输出端实现相互抵消。
因此,按照本发明提供的外加扰动添加方法,结合图6所示,第一级调制器的输出为:
第二级调制器的输出为:
第三级调制器的输出为:
误差消除逻辑电路的输出为:
Y(z)=Y1(z)+Y2(z)(1-z-1)+Y3(z)(1-z-1)2
其中,X(z)和Y(z)分别是输入信号x[n]和输出信号y[n]的Z变换;Ei(z)和Yi(z)分别是第i级误差反馈调制器的量化误差ei[n]和输出信号yi[n]的Z域表达式;D(z)为外加扰动信号d[n]的Z域表达式,M为量化器的量化间隔;
将前三式联合代入第四式可以推导出按照本发明提供的扰动添加方法下的MASH 1-1-1DDSM的输入输出函数为:
由上式可以看出本发明提供的扰动添加方法应用到MASH 1-1-1DDSM的第二级误差反馈调制器电路也可以实现外加扰动信号的相互抵消,使得输出频谱的低频底噪不会受到外加扰动信号的恶化。
本发明针对多级噪声整形数字Delta-Sigma调制器,在传统的扰动信号添加方式基础上,将外加扰动信号分别进行取反处理和增益处理后,分别注入到调制器电路的两个不同节点,使得外加扰动信号不仅能有效延长调制器的输出序列长度,还能实现外加扰动信号的相互抵消,有效避免了外加扰动信号出现在调制器的输出功率谱中。以上仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
多级噪声整形数字Delta-Sigma调制器的外加扰动信号的添加方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0