









专利摘要
本发明公开了一种越障减震车轮,涉及机器人技术领域,包括固定中心架,该固定中心架具有多根径向向外伸出且呈圆周分布的辐条,各所述辐条末端布置有行走小轮,相邻两根所述辐条之间布置有呈圆弧形的活动轮板,每个所述活动轮板均通过弹性导向机构连接所述固定中心架,所述固定中心架布置有锁死机构,所述锁死机构控制各活动轮板朝所述固定中心架轴线方向移动的行程。本发明通过活动轮板的移动行程改变可使车轮具有平稳路面运行状态或避障减震运行状态,车轮具有很强的地形的适应能力。
权利要求
1.一种越障减震车轮,其特征在于:包括固定中心架(1),该固定中心架(1)具有多根径 向向外伸出且呈圆周分布的辐条,各所述辐条末端布置有行走小轮(7),相邻两根所述辐条 之间布置有呈圆弧形的活动轮板(2),每个所述活动轮板(2)均通过弹性导向机构连接所述 固定中心架(1),所述固定中心架(1)布置有锁死机构,所述锁死机构控制各活动轮板(2)朝 所述固定中心架(1)轴线方向移动的行程。
2.根据权利要求1所述的越障减震车轮,其特征在于:各所述弹性导向机构均包括弹性 件、布置在所述固定中心架(1)的轴承座(5)、若干个布置在该轴承座(5)内且相互平行的直 线轴承(10)、若干根可沿相应的直线轴承(10)移动的平行轴(4),所述平行轴(4)的一端连 接活动轮板(2)的内壁,所述弹性件的一端连接在所述活动轮板(2)的内壁,所述弹性件的 另一端连接在所述固定中心架(1)。
3.根据权利要求2所述的越障减震车轮,其特征在于:所述锁死机构包括轮盘(8),该轮 盘(8)具有若干根径向向外伸出且呈圆周分布的连接杆,所述连接杆的数量与所述平行轴 (4)的数量相同,各所述连接杆的末端连接有圆柱销(6),所述轮盘(8)通过驱动机构使各所 述圆柱销(6)压触或远离相应的平行轴(4)端面。
4.根据权利要求3所述的越障减震车轮,其特征在于:所述驱动机构包括布置在所述固 定中心架(1)的舵机(11),所述轮盘(8)连接所述舵机(11)的输出轴。
5.根据权利要求4所述的越障减震车轮,其特征在于:所述弹性件为压缩弹簧(3)或橡 胶弹性套筒。
6.根据权利要求5所述的越障减震车轮,其特征在于:所述固定中心架(1)连接有一法 兰支架(9),该法兰支架(9)具有多个连接在所述辐条上的支腿,该法兰支架(9)外侧端面连 接有法兰盘(12),该法兰盘(12)连接有与所述固定中心架(1)共轴线的动力输入轴(13)。
7.根据权利要求6所述的越障减震车轮,其特征在于:各所述行走小轮(7)圆周外表面 布置有防滑橡胶。
8.根据权利要求6所述的越障减震车轮,其特征在于:各所述活动轮板(2)外壁布置有 防滑橡胶。
9.根据权利要求1至8任一项所述的越障减震车轮,其特征在于:各所述活动轮板(2)两 端布置有第一凸缘(21)和第二凸缘(22),所述活动轮板(2)的第一凸缘(21)和相邻活动轮 板的(2)的第二凸缘(22)分别位于相应行走小轮(7)的两侧。
说明书
技术领域
本发明涉及机器人技术领域,特别涉及一种越障减震车轮。
背景技术
随着机器人技术的不断发展,在面对恶劣环境和复杂地形时,利用移动机器人不 同的运动方式来增强其地形适应和自主运动能力是近年发展较快的一种机器人技术。相比 普通轮式、履带式或一般足式运动的运动,这种可变形态越障减震车轮不仅可在平坦路面 平稳运行,而且通过变形在不平坦地面可以适应地形减震,并且能翻越略大于车轮半径的 障碍。
对国内外复杂环境下的移动机器人分析后发现,当前机器人的运动机构主要采用 轮式机构、履带式机构、腿式机构以及它们的复合机构等形式。轮式机构移动速度很快,控 制也简单,但是在越障方面表现极差。履带式机构环境适应能力很强,尤其加了摆臂之后, 但是能耗大。对于腿式机构而言,由于机器人的足端与地面是点接触,对环境要求低,因而 越障能力强,但是运动速度低,结构和控制都较为复杂。而复合式结构,如履腿式、轮履式、 轮腿式甚至轮履腿式,往往会将其各方面的优点结合起来,发挥各自最好的性能优势,应用 也越来越广,但其控制有一定的复杂性。
现已有一些可变形车轮可以实现越障功能,发明专利CN201510927554.0公开了一 种具有轮爪切换功能的越障车轮,可以自主切换轮式和爪式运动,实现对不同地面的适应。
发明专利CN201110110300.1公开了一种支撑杆式越障车轮,其通过机构的轴向移 动切换轮式和杆式运动模式。
发明专利CN201520463075.3公开了一种越障车轮,通过向车轮外伸出六根杆实现 越障功能。
考虑到复杂环境下作业的移动机器人系统的功能需求,在越障的同时能够有一定 的减震功能,需设计一种可帮助移动机器人在不同地形能高效平稳运行的新型车轮,且具 备越障减震能力,轮式和变形模式两种运动模式。
发明内容
本发明的目的,在于提供一种越障减震车轮,不仅具有平坦路面平稳运行能力,还 具有较大障碍物翻越的能力,同时在不平稳路面具有被动减震的功能。
为解决上述技术问题所采用的技术方案:
一种越障减震车轮,包括固定中心架,该固定中心架具有多根径向向外伸出且呈 圆周分布的辐条,各所述辐条末端布置有行走小轮,相邻两根所述辐条之间布置有呈圆弧 形的活动轮板,每个所述活动轮板均通过弹性导向机构连接所述固定中心架,所述固定中 心架布置有锁死机构,所述锁死机构控制各活动轮板朝所述固定中心架轴线方向移动的行 程。
作为上述技术方案的进一步改进,各所述弹性导向机构均包括弹性件、布置在所 述固定中心架的轴承座、若干个布置在该轴承座内且相互平行的直线轴承、若干根可沿相 应的直线轴承移动的平行轴,所述平行轴的一端连接活动轮板的内壁,所述弹性件的一端 连接在所述活动轮板的内壁,所述弹性件的另一端连接在所述固定中心架。
作为上述技术方案的进一步改进,所述锁死机构包括轮盘,该轮盘具有若干根径 向向外伸出且呈圆周分布的连接杆,所述连接杆的数量与所述平行轴的数量相同,各所述 连接杆的末端连接有圆柱销,所述轮盘通过驱动机构使各所述圆柱销压触或远离相应的平 行轴端面。
作为上述技术方案的进一步改进,所述驱动机构包括布置在所述固定中心架的舵 机,所述轮盘连接在所述舵机输出轴上。
作为上述技术方案的进一步改进,所述弹性件为压缩弹簧或橡胶弹性套筒。
作为上述技术方案的进一步改进,所述固定中心架连接有一法兰支架,该法兰支 架具有多个连接在所述辐条上的支腿,该法兰支架外侧端面连接有法兰盘,该法兰连接有 与所述固定中心架共轴线的动力输入轴。
作为上述技术方案的进一步改进,各所述行走小轮圆周外表面布置有防滑橡胶。 更进一步的,各所述活动轮板外壁布置有防滑橡胶。
作为上述技术方案的进一步改进,各所述活动轮板两端布置有第一凸缘和第二凸 缘,所述活动轮板的第一凸缘和相邻活动轮板的第二凸缘分别分布在相应行走小轮的两 侧。
本发明的有益效果是:本发明通过设计若干个活动轮板,并通过锁死机构控制各 活动轮板朝固定中心架轴线方向移动的行程,从而使车轮处于避障减震运行状态或平稳路 面运行状态。安装该车轮的移动机器人在平台路面工作时,车轮处于平稳路面运行状态,锁 死机构锁死,活动轮板无法朝固定中心架轴线方向移动,车轮呈现或完整圆形或大致呈圆 形,可以在平坦路面平稳快速运行;当遭遇障碍和路面不平时,车轮处于避障减震运行状 态,锁死机构松开,活动轮板可以朝固定中心架轴线方向移动,使得固定中心架的辐条末端 上的行走小轮作为运动支点,这时车轮变化为自适应变形车轮,可通过行走小轮作为支点 对大型障碍物进行翻越,而连接弹性导向机构的活动轮板可在运动过程中起到减震的作 用。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单说明。显然,所描述的附图只是本发明的一部分实施例,而不是全部实施 例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计 方案和附图。
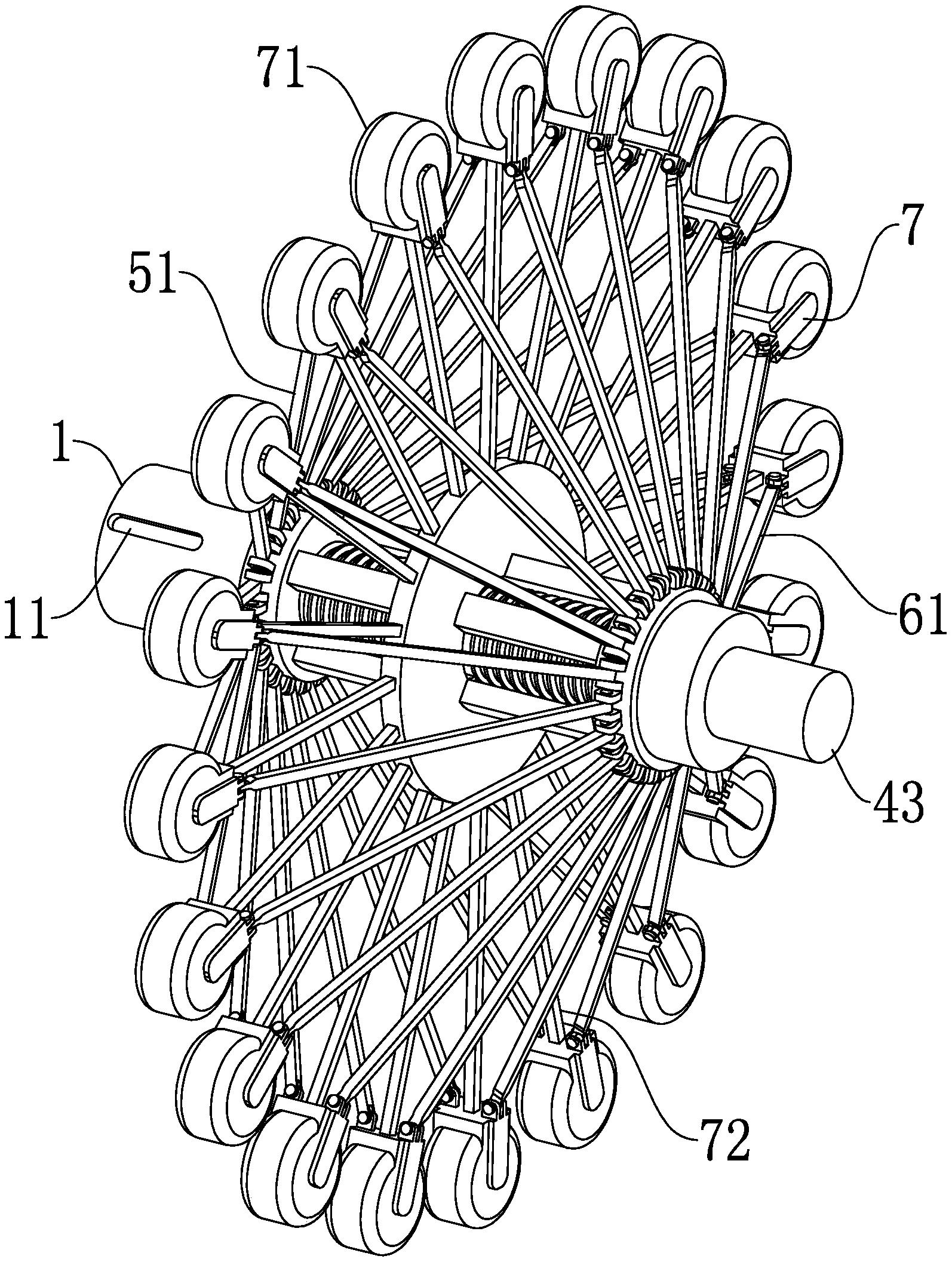
图1是本发明的透视图;
图2是本发明处于平稳路面运行状态时的透视图;
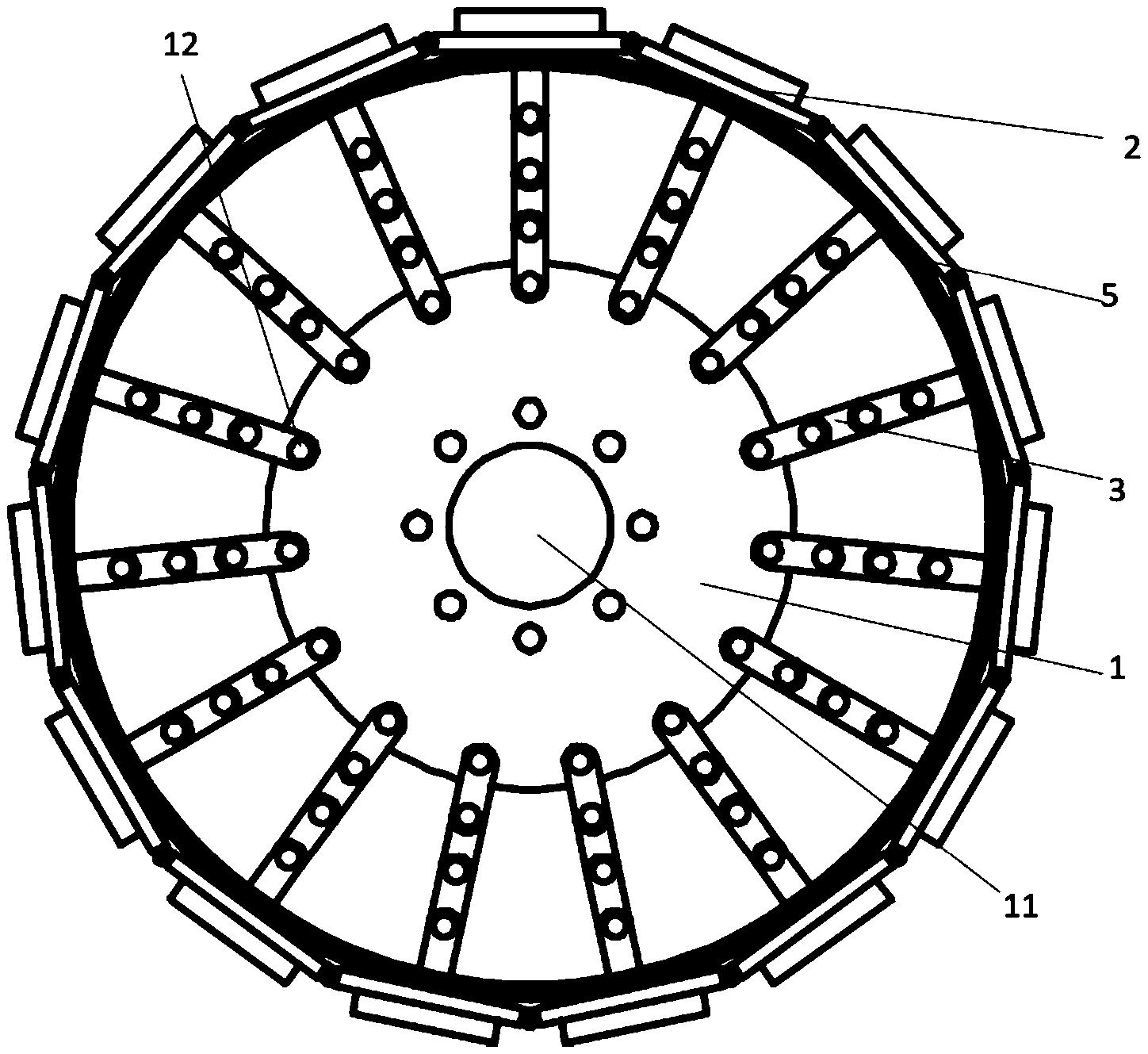
图3是本发明处于平稳路面运行状态时的正视图;
图4是本发明处于避障减震运行状态时的透视图;
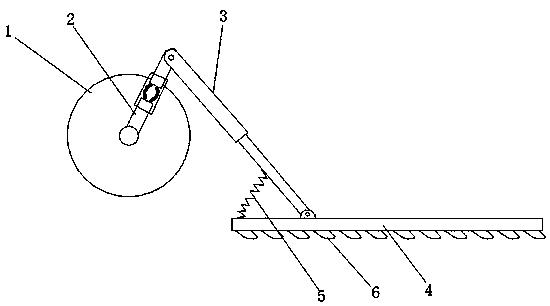
图5是本发明处于避障减震运行状态时的正视图。
具体实施方式
以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清 楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发 明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出 创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,文中所提到的 所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减 少联接辅件,来组成更优的联接结构。
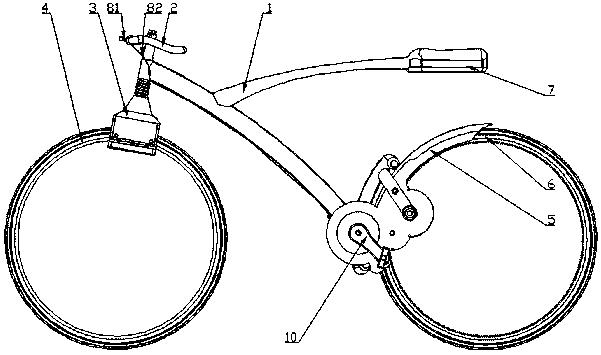
参照图1至图5,一种越障减震车轮,包括固定中心架1,该固定中心架1具有三根径 向向外伸出且呈圆周分布的辐条,各辐条末端布置有行走小轮7,相邻两根辐条之间布置有 呈圆弧形的活动轮板2,每个活动轮板2均通过弹性导向机构连接固定中心架1。
其中,各弹性导向机构均包括弹性件、布置在固定中心架1的轴承座5、两个布置在 该轴承座5内且相互平行的直线轴承10、两根可沿相应的直线轴承10移动的平行轴4,平行 轴4的一端连接活动轮板2的内壁。弹性件在本实施方式中优选压缩弹簧3,当然还可以选择 橡胶弹性套筒,压缩弹簧3的一端连接在活动轮板2的内壁,压缩弹簧3的另一端连接在固定 中心架1,轴承座5布置有压缩弹簧3的通行槽。当然还可以将压缩弹簧3套设在平行轴4,不 过需要将压缩弹簧3的数量设计成和平行轴4的数量相当,此时各压缩弹簧3的一端连接在 活动轮板2的内壁,压缩弹簧3的另一端则抵接在轴承座5外侧端面。
另外,固定中心架1布置有锁死机构,锁死机构控制各活动轮板2朝固定中心架1轴 线方向移动的行程,从而使车轮处于避障减震运行状态或平稳路面运行状态。锁死机构包 括轮盘8,该轮盘8具有六根径向向外伸出且呈圆周分布的连接杆,各连接杆的末端连接有 圆柱销6,轮盘8通过驱动机构使各圆柱销6压触或远离相应的平行轴4端面。驱动机构包括 布置在固定中心架1的舵机11,轮盘8连接在舵机11输出轴上,舵机11的电源及控制线通过 三路导电滑环实现电路连通,以实现车轮转动时对锁死机构8的控制。本发明通过舵机1控 制轮盘8旋转角度,从而使各连接杆末端的圆柱销6压触或远离相应的平行轴4端面,达到控 制活动轮板2朝固定中心架1轴线方向移动的行程。
固定中心架1还连接有一法兰支架9,法兰支架9具有三个连接在辐条上的支腿,每 个支腿相应连接在对应的辐条上,法兰支架9外侧端面连接有法兰盘12,该法兰盘12连接有 与固定中心架1共轴线的动力输入轴13。
进一步作为优选的实施方式,各活动轮板2两端布置有第一凸缘21和第二凸缘22, 活动轮板2的第一凸缘21和相邻活动轮板的2的第二凸缘22分别位于相应行走小轮7的两 侧,使车轮行走更加平稳。
进一步作为优选的实施方式,各行走小轮7圆周外表面布置有防滑橡胶。更进一步 的,各活动轮板2外壁布置有防滑橡胶。
参照图2和图3,在初始状态下,各圆柱销6外圆周面压触在相应的平行轴4端面从 而限制平行轴4的移动,即限制活动轮板2朝固定中心架轴线方向移动,此时压缩弹簧3处于 自由状态,车轮处于平稳路面运行状态,各活动轮板2和各行走小轮7均与同一个外接圆相 切,车轮呈现完整圆形。当然由于制造误差或者压缩弹簧3处于疲劳状态,抑或是各活动轮 板2和各行走小轮7与同一个外接圆的间距小于压缩弹簧3的最大压缩行程,车轮大致呈圆 形,亦属于本发明的保护范围。安装该车轮的移动机器人在平台路面工作时,车轮处于平稳 路面运行状态,锁死机构锁死,活动轮板2无法朝固定中心架轴线移动,车轮可以在平坦路 面平稳快速运行。
参照图4和图5,车轮处于避障减震运行状态,部分活动轮板2朝向固定中心架1轴 线方向移动。其原理是,当车轮遭遇障碍或路面不平时,车轮处于避障减震运行状态,锁死 机构松开,即轮盘8旋转至各圆柱销6外圆周面不再压触在平行轴4端面,使平行轴4可沿轴 承座5上的直线轴承10移动,活动轮板2可以朝固定中心架1轴线移动。此时,固定中心架1的 辐条末端上的行走小轮作为运动支点,车轮变化为自适应变形车轮,可通过行走小轮作为 支点对大型障碍物进行翻越,而连接弹性导向机构的活动轮板2可在运动过程中起到减震 的作用,起减震的作用的活动轮板2朝固定中心架1轴心径向移动,此时相应的弹性导向机 构的压缩弹簧3处于压缩状态。
上面结合附图对本发明的实施方式作了详细说明,但是本发明不限于上述实施方 式,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前 提下作出各种变化。
一种越障减震车轮专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0