








专利摘要
本实用新型提供了一种用于物品输送的机器人及物料运输系统,涉及机器人技术领域。该用于物品输送的机器人包括机器人本体和位于机器人本体顶部的储存装置,储存装置包括储存本体,储存本体上设置有储存组件和控制器;将物品置于储存隔室中,通过储存封盖进行锁固,由控制器进行开启和关闭。该物料运输系统包括上述用于物品输送的机器人,其能够进行保密输送,适应更个性化的需求。
权利要求
1.一种用于物品输送的机器人,其特征在于,包括机器人本体和位于所述机器人本体顶部的储存装置,所述储存装置包括储存本体,所述储存本体上设置有储存组件和控制器;
所述储存组件包括多个储存隔室和与多个所述储存隔室相对应的储存封盖,所述储存封盖一端与所述储存隔室的侧壁转动连接,所述储存封盖的另一端通过锁固件与所述储存隔室的侧壁相连,且所述锁固件与所述控制器通信连接;
每个所述储存隔室内均设置有防盗隔层,所述防盗隔层从所述储存隔室的一侧延伸至所述储存隔室相对的另一侧,且所述防盗隔层的底部与所述储存隔室的底壁相连,所述防盗隔层的顶部与所述储存隔室的顶壁间隔设置;
所述防盗隔层上设置有固定条,所述固定条上设置有固定孔,所述储存隔室的内壁上设置有与所述固定孔相配合的卡钩,所述用于物品输送的机器人还包括卡接部与所述卡钩相配的固定锁。
2.根据权利要求1所述的用于物品输送的机器人,其特征在于,所述防盗隔层的顶部与所述储存隔室的顶壁之间的距离为8-15cm,所述储存隔室的高度为40-60cm。
3.根据权利要求2所述的用于物品输送的机器人,其特征在于,所述储存隔室的外壁与所述防盗隔层靠近所述储存封盖一端的距离为10-20cm。
4.根据权利要求1所述的用于物品输送的机器人,其特征在于,所述储存本体上设置有控制区和位于所述控制区两侧的储存区,多个所述储存隔室均位于所述储存区,所述控制器安装于所述储存本体的内腔中;
所述控制区包括显示屏和多个按键,所述显示屏和多个所述按键均与所述控制器通信连接。
5.根据权利要求4所述的用于物品输送的机器人,其特征在于,所述机器人本体与前进方向相对的另一端壁面上设置有脚踏部;
所述机器人本体与前进方向相对的另一端壁面上设置有与所述脚踏部相配合的滑槽,所述脚踏部远离所述前进方向的一端设置有拉手。
6.根据权利要求1所述的用于物品输送的机器人,其特征在于,所述机器人本体还包括用于驱动所述机器人本体行走的行走机构,所述行走机构包括第一主动行走轮、第一从动行走轮、第二主动行走轮、第二从动行走轮、第一行走驱动电机和第二行走驱动电机,所述第一主动行走轮和所述第一从动行走轮位于所述机器人本体的一侧,所述第二主动行走轮和所述第二主动行走轮位于所述机器人本体相对的另一侧;
所述第一主动行走轮和所述第一行走驱动电机的输出端相连,以驱动所述第一主动行走轮转动,所述第一主动行走轮和所述第一从动行走轮传动连接;所述第二主动行走轮和所述第二行走驱动电机的输出端相连,以驱动所述第二主动行走轮转动,所述第二主动行走轮和所述第二从动行走轮传动连接;
所述控制器与所述第一行走驱动电机和所述第二行走驱动电机通信连接。
7.根据权利要求6所述的用于物品输送的机器人,其特征在于,所述行走机构还包括四个摆臂组件,每个所述摆臂组件均包括第一摆臂轮和尺寸小于所述第一摆臂轮的第二摆臂轮,所述第一摆臂轮和所述第二摆臂轮传动连接,四个所述第一摆臂轮分别对应所述第一主动行走轮、所述第一从动行走轮,所述第二主动行走轮和所述第二主动行走轮,且每个所述第一摆臂轮均与对应的行走轮传动连接。
8.根据权利要求7所述的用于物品输送的机器人,其特征在于,每个所述摆臂组件均包括一个连接臂,所述连接臂的一端与所述第一摆臂轮的中心轴相连,所述连接臂的另一端与所述第二摆臂轮的中心轴相连,且所述连接臂上设置有多个减重孔;
所述减重孔包括多个第一减重孔和尺寸小于所述第一减重孔的多个第二减重孔,所述第一减重孔位于所述连接臂靠近所述第二摆臂轮的一端,所述第二减重孔位于所述连接臂靠近所述第一摆臂轮的一端。
9.根据权利要求7所述的用于物品输送的机器人,其特征在于,所述行走机构包括第一传动带、第二传动带和第三传动带,所述第一主动行走轮和所述第一从动行走轮通过所述第一传动带传动连接,所述第二主动行走轮和所述第二从动行走轮通过所述第二传动带传动连接,所述第一摆臂轮和所述第二摆臂轮通过所述第三传动带传动连接。
10.一种物料运输系统,其特征在于,包括权利要求1-9中任一项所述的用于物品输送的机器人。
说明书
技术领域
本实用新型涉及机器人技术领域,具体而言,涉及一种用于物品输送的机器人及物料运输系统。
背景技术
机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发。
但是,许多应用环境中对机器人的作业提出了更高要求,如可能在不少危险作业的环境中需要执行任务,且路途往往比较颠簸,这都对机器人的各方面性能提出了更高要求,同时对机器人的多功能性也提出了更高要求。
实用新型内容
本实用新型的目的在于提供一种用于物品输送的机器人,旨在提升机器人的多功能性。
本实用新型的另一目的在于提供一种物料运输系统,其能够进行保密物品输送工作。
本实用新型是这样实现的:
一种用于物品输送的机器人,包括机器人本体和位于机器人本体顶部的储存装置,储存装置包括储存本体,储存本体上设置有储存组件和控制器;
储存组件包括多个储存隔室和与多个储存隔室相对应的储存封盖,储存封盖一端与储存隔室的侧壁转动连接,储存封盖的另一端通过锁固件与储存隔室的侧壁相连,且锁固件与控制器通信连接;
每个储存隔室内均设置有防盗隔层,防盗隔层从储存隔室的一侧延伸至储存隔室相对的另一侧,且防盗隔层的底部与储存隔室的底壁相连,防盗隔层的顶部与储存隔室的顶壁间隔设置;
防盗隔层上设置有固定条,固定条上设置有固定孔,储存隔室的内壁上设置有与固定孔相配合的卡钩,用于物品输送的机器人还包括卡接部与卡钩相配的固定锁。
进一步地,在本实用新型较佳的实施例中,防盗隔层的顶部与储存隔室的顶壁之间的距离为8-15cm,储存隔室的高度为40-60cm。
进一步地,在本实用新型较佳的实施例中,储存隔室的外壁与防盗隔层靠近储存封盖一端的距离为10-20cm。
进一步地,在本实用新型较佳的实施例中,储存本体上设置有控制区和位于控制区两侧的储存区,多个储存隔室均位于储存区,控制器安装于储存本体的内腔中;
控制区包括显示屏和多个按键,显示屏和多个按键均与控制器通信连接。
进一步地,在本实用新型较佳的实施例中,机器人本体与前进方向相对的另一端壁面上设置有脚踏部;
机器人本体与前进方向相对的另一端壁面上设置有与脚踏部相配合的滑槽,脚踏部远离前进方向的一端设置有拉手。
进一步地,在本实用新型较佳的实施例中,机器人本体还包括用于驱动机器人本体行走的行走机构,行走机构包括第一主动行走轮、第一从动行走轮、第二主动行走轮、第二从动行走轮、第一行走驱动电机和第二行走驱动电机,第一主动行走轮和第一从动行走轮位于机器人本体的一侧,第二主动行走轮和第二主动行走轮位于机器人本体相对的另一侧;
第一主动行走轮和第一行走驱动电机的输出端相连,以驱动第一主动行走轮转动,第一主动行走轮和第一从动行走轮传动连接;第二主动行走轮和第二行走驱动电机的输出端相连,以驱动第二主动行走轮转动,第二主动行走轮和第二从动行走轮传动连接;
控制器与第一行走驱动电机和第二行走驱动电机通信连接。
进一步地,在本实用新型较佳的实施例中,行走机构还包括四个摆臂组件,每个摆臂组件均包括第一摆臂轮和尺寸小于第一摆臂轮的第二摆臂轮,第一摆臂轮和第二摆臂轮传动连接,四个第一摆臂轮分别对应第一主动行走轮、第一从动行走轮,第二主动行走轮和第二主动行走轮,且每个第一摆臂轮均与对应的行走轮传动连接。
进一步地,在本实用新型较佳的实施例中,每个摆臂组件均包括一个连接臂,连接臂的一端与第一摆臂轮的中心轴相连,连接臂的另一端与第二摆臂轮的中心轴相连,且连接臂上设置有多个减重孔;
减重孔包括多个第一减重孔和尺寸小于第一减重孔的多个第二减重孔,第一减重孔位于连接臂靠近第二摆臂轮的一端,第二减重孔位于连接臂靠近第一摆臂轮的一端。
进一步地,在本实用新型较佳的实施例中,行走机构包括第一传动带、第二传动带和第三传动带,第一主动行走轮和第一从动行走轮通过第一传动带传动连接,第二主动行走轮和第二从动行走轮通过第二传动带传动连接,第一摆臂轮和第二摆臂轮通过第三传动带传动连接。
一种物料运输系统,包括上述用于物品输送的机器人。
本实用新型的有益效果是:本实用新型通过上述设计得到的用于物品输送的机器人,其通过将在机器人本体顶部设置的储存装置进行物品的存储,将物品置于储存隔室中,通过储存封盖进行锁固,由控制器进行开启和关闭。本实用新型还提供了一种物料运输系统,包括上述用于物品输送的机器人,其能够进行保密输送,适应更个性化的需求。
附图说明
为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1是本实用新型实施方式提供的用于物品输送的机器人的结构示意图;
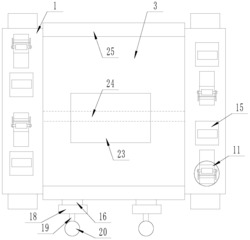
图2是图1中机器人行走装置的部分结构示意图;
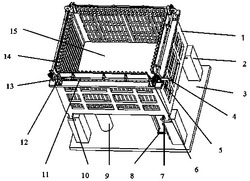
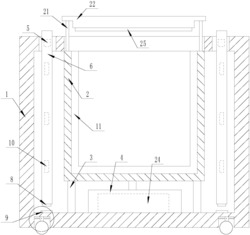
图3是图1中储存装置的结构示意图;
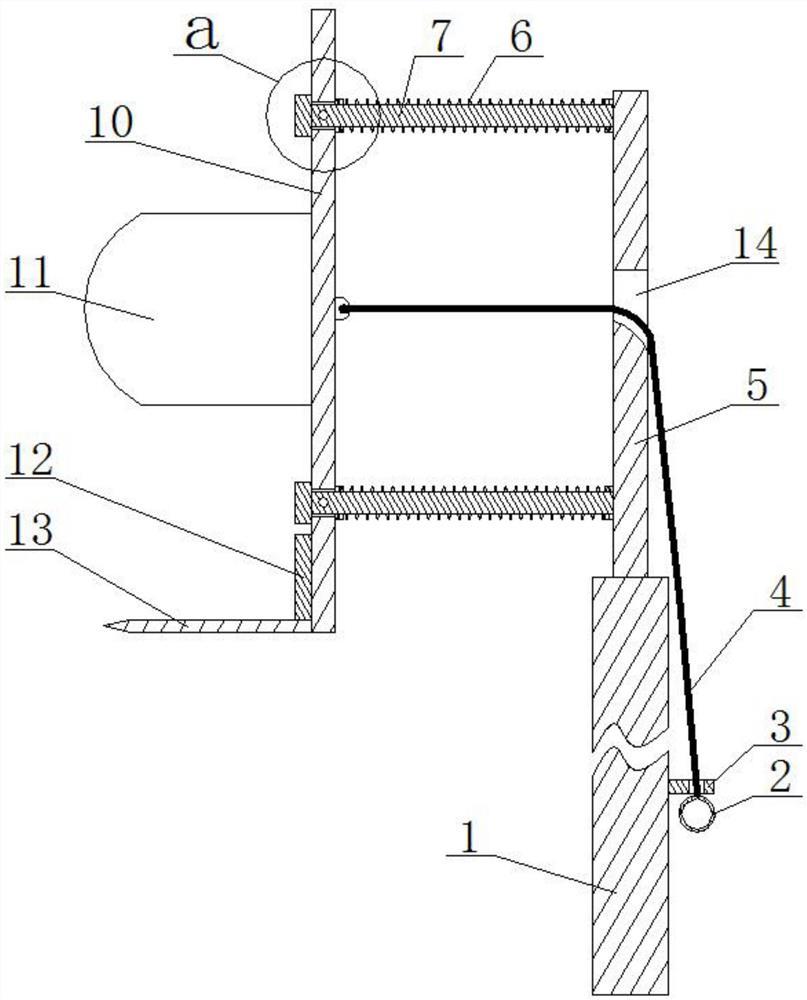
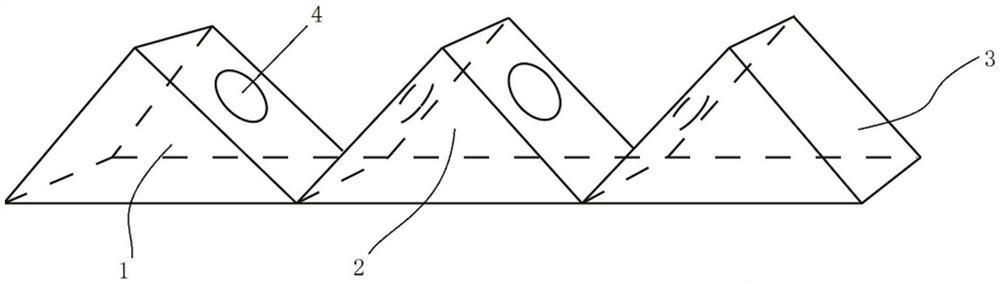
图4是图3中储存组件的部门机构示意图;
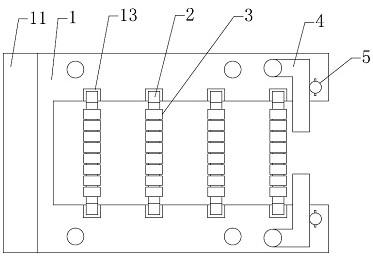
图5是图4中储存组件的剖视图;
图6是图1中机器人本体的尾部结构示意图。
图标:100-用于物品输送的机器人;110-机器人本体;111-摄像头;112-脚踏部;114-滑槽;116-拉手;120-机器人行走装置;1201-第一传动带;1202-第二传动带;1203-第三传动带;121-第一行走驱动电机;122-第一主动行走轮;124-第一从动行走轮;126-第二主动行走轮;128-第二从动行走轮;129-摆臂组件;1292-第一摆臂轮;1294-第二摆臂轮;1296-连接臂;1297-减重孔;1298-第一减重孔;1299-第二减重孔;130-储存装置;132-储存本体;1322-控制区;1324-储存区;1326-显示屏;1328-按键;134-储存组件;1342-储存隔室;1343-锁固件;1344-储存封盖;1345-防盗隔层;1346-固定条;1347-固定孔;1348-卡钩;1349-固定锁;136-控制器。
具体实施方式
为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
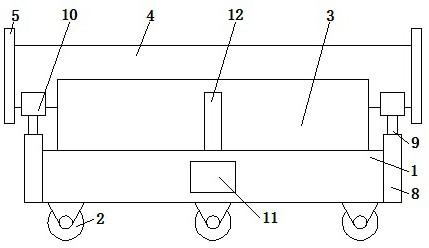
请参照图1,本实用新型实施例提供了一种用于物品输送的机器人100,包括机器人本体110、机器人行走装置120和位于机器人本体110顶部的储存装置130。机器人行走装置120安装于机器人本体110上用于适应不同路况的道路情况,更加稳步地前进。储存装置130安装于机器人本体110的顶部用于盛放待传输的物品。
具体地,请结合图1和图2,机器人行走装置120包括第一主动行走轮122、第一从动行走轮124,第二主动行走轮126和第二从动行走轮128、第一行走驱动电机121和第二行走驱动电机,第一主动行走轮122和第一从动行走轮124位于机器人本体110的一侧,第二主动行走轮126和第二主动行走轮126位于机器人本体110相对的另一侧;第一主动行走轮122和第一行走驱动电机121的输出端相连,以驱动第一主动行走轮122转动,第一主动行走轮122和第一从动行走轮124传动连接;第二主动行走轮126和第二行走驱动电机的输出端相连,以驱动第二主动行走轮126转动,第二主动行走轮126和第二从动行走轮128传动连接。
需要说明的是,用于物品输送的机器人100通过第一行走驱动电机121驱动第一主动行走轮122转动,进而带动第一从动行走轮124转动,通过第二行走驱动电机驱动第二主动行走轮126转动,进而带动第二从动行走轮128转动,如此使得机器人进行行走,在行走过程中的稳定性较强。其中可以通过转动轴将第一主动行走轮122和相对的第二从动行走轮128连接,使二者同轴转动。
进一步地,机器人行走装置120还包括四个摆臂组件129,每个摆臂组件129均包括第一摆臂轮1292和尺寸小于第一摆臂轮1292的第二摆臂轮1294,第一摆臂轮1292和第二摆臂轮1294传动连接,四个第一摆臂轮1292分别对应第一主动行走轮122、第一从动行走轮124,第二主动行走轮126和第二主动行走轮126,且每个第一摆臂轮1292均与对应的行走轮传动连接。第一主动行走轮122、第一从动行走轮124,第二主动行走轮126和第二主动行走轮126通过传动轴带动对应的第一摆臂轮1292转动,进而带动第二摆臂轮1294转动,增加对颠簸路况的适应能力,如遇到低洼路况时摆臂组件129起到支撑作用,能够更快地跨越低洼路况。具体地,第一摆臂轮1292和第二摆臂轮1294可以通过连接臂1296进行固定,连接臂1296的一端与第一摆臂轮1292的中心轴相连,连接臂1296的另一端与第二摆臂轮1294的中心轴相连,且连接臂1296上设置有多个减重孔1297。
具体地,减重孔1297包括多个第一减重孔1298和尺寸小于第一减重孔1298的多个第二减重孔1299,第一减重孔1298位于连接臂1296靠近第二摆臂轮1294的一端,第二减重孔1299位于连接臂1296靠近第一摆臂轮1292的一端。其中,靠近第二摆臂轮1294一端的减重孔1297的尺寸较大,使得运行起来更加稳定,易于操作。
进一步地,机器人行走装置120包括第一传动带1201、第二传动带1202和第三传动带1203,第一主动行走轮122和第一从动行走轮124通过第一传动带1201传动连接,第二主动行走轮126和第二从动行走轮128通过第二传动带1202传动连接,第一摆臂轮1292和第二摆臂轮1294通过第三传动带1203传动连接。通过传动带进行传动,稳定性高,有利于适应颠簸路段。
在其他实施例中,可以设置摆臂电机用于驱动第一摆臂轮1292,使之与对应的传动轮独立转动。
请结合图1和图3,机器人本体110上的储存装置130包括储存本体132,储存本体132上设置有储存组件134和控制器136,控制器136与第一行走驱动电机121和第二行走驱动电机通信连接。
具体地,控制器136可以是一种集成电路芯片,具有信号的处理能力。上述的控制器136可以是通用控制器136,包括中央控制器136(Central Processing Unit,CPU)、网络控制器136(Network Processor,NP)等;还可以是数字信号控制器136(Digital SignalProcessing,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现成可编程门阵列(Field Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。通用控制器136可以是微控制器136或者该控制器13613也可以是任何常规的控制器136等。于本实施例中,优选地,该控制器13613可以是STM32系列的控制器136,例如STM32F103C8T6、STM32F103VET6等型号。
具体地,还可以在机器人本体110上设置摄像头111用于观察前方路况,并将摄像头111与控制器136通信连接,并通过一般的无线电设备将信号反馈给控制区,操作人员通过控制控制器136进行运行的调整。
请参照图3-图5,储存组件134包括多个储存隔室1342和与多个储存隔室1342相对应的储存封盖1344,储存封盖1344一端与储存隔室1342的侧壁转动连接,储存封盖1344的另一端通过锁固件1343与储存隔室1342的侧壁相连,且锁固件1343与控制器136通信连接。锁固件1343可以为现有的用于快递存放机构中的锁固件1343,其可以通过输入验证码等方式进行身份验证,若符合要求控制器136才控制锁固件1343打开,从而取出物品。
需要指出的是,可以根据具体的需求,如运输物品的形状尺寸对储存隔室1342的大小进行设置,同样其形状和大小也可以是多种形式的,不一定要统一尺寸。
进一步地,每个储存隔室1342内均设置有防盗隔层1345,防盗隔层1345从储存隔室1342的一侧延伸至储存隔室1342相对的另一侧,且防盗隔层1345的底部与储存隔室1342的底壁相连,防盗隔层1345的顶部与储存隔室1342的顶壁间隔设置;防盗隔层1345上设置有固定条1346,固定条1346上设置有固定孔1347,储存隔室1342的内壁上设置有与固定孔1347相配合的卡钩1348,用于物品输送的机器人100还包括卡接部与卡钩1348相配的固定锁1349。通过设置防盗隔层1345可以再次设置屏障,增加了物品输送的安全系数,,防盗隔层1345与储存隔室1342的固定是常用的锁的结构,可以为密码锁,便于同部门的人们记忆密码就可以开启防盗隔层1345。
需要指出的是,防盗隔层1345的顶部与储存隔室1342的顶壁间隔设置便于将货物通过间距放置入储存隔室1342内,不需要反复开启固定锁1349,操作方便,同时还不影响防盗隔层1345的屏障作用。
进一步地,防盗隔层1345的顶部与储存隔室1342的顶壁之间的距离为8-15cm,储存隔室1342的高度为40-60cm。储存隔室1342的外壁与防盗隔层1345靠近储存封盖1344一端的距离为10-20cm。在上述的尺寸条件下,防盗隔层1345既可以不影响放入物品,又能够起到屏障作用。
请再次参照图3,储存本体132上设置有控制区1322和位于控制区1322两侧的储存区1324,多个储存隔室1342均位于储存区1324,控制器136安装于储存本体132的内腔中;控制区1322包括显示屏1326和多个按键1328,显示屏1326和多个按键1328均与控制器136通信连接。
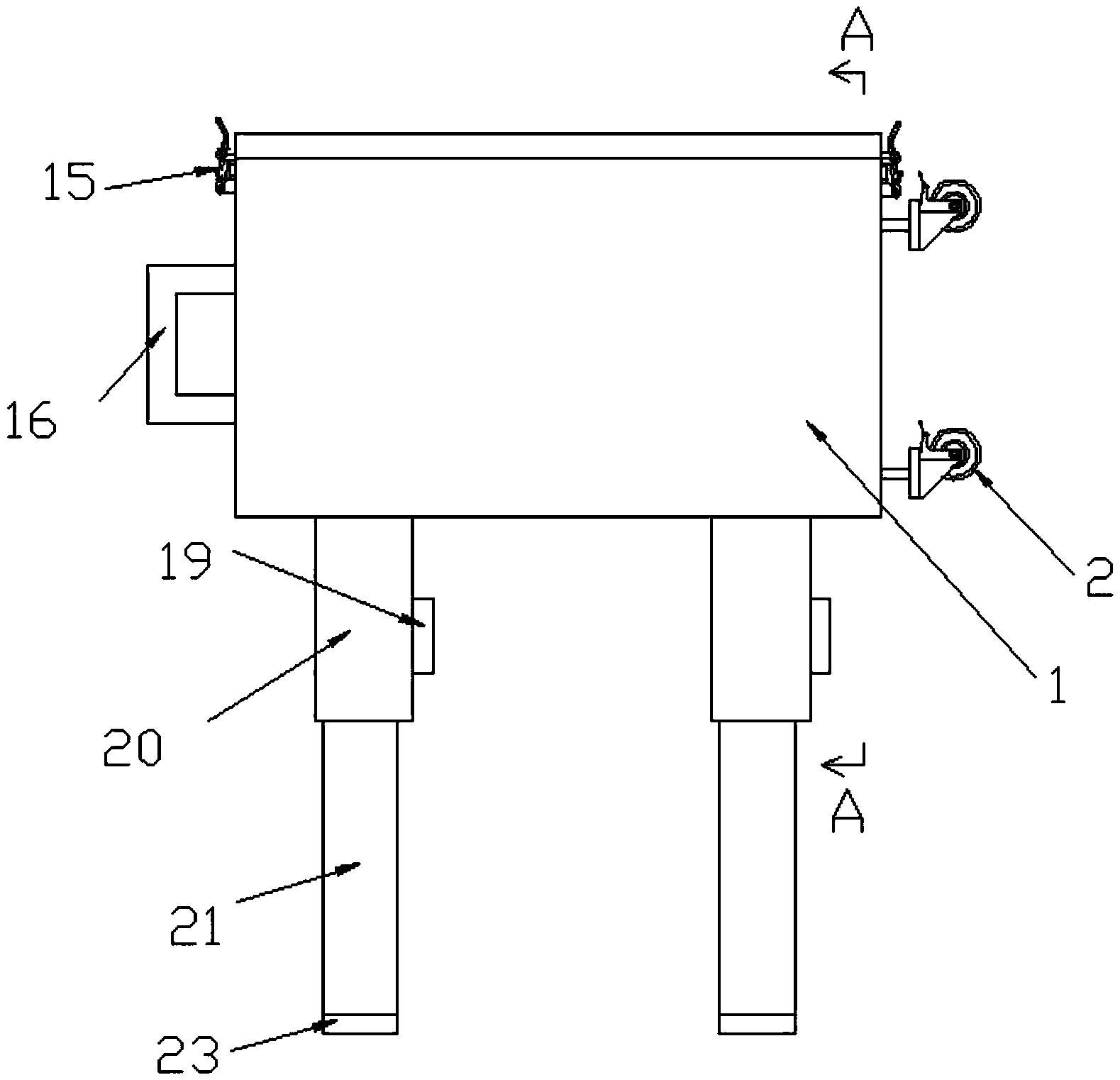
进一步地,请结合图1和图6,机器人本体110与前进方向相对的另一端壁面上设置有脚踏部112,即在机器人本体110的尾部设置脚踏部112,便于操作人员通过脚踏部112上至机器人本体110的顶部,进行物品的取放。
进一步地,机器人本体110与前进方向相对的另一端壁面上设置有与脚踏部112相配合的滑槽114,脚踏部112远离前进方向的一端设置有拉手116。通过弧形拉手116可以拉动脚踏部112在滑槽114中滑出或滑入,在不使用时可以收纳起来。
本实用新型实施例还提供了一种物料运输系统,包括装运车辆和上述用于物品输送的机器人。能够适应更加严苛的道路且进行保密输送工作。
综上所述,本实用新型提供了用于物品输送的机器人,其通过将在机器人本体顶部设置的储存装置进行物品的存储,将物品置于储存隔室中,通过储存封盖进行锁固,由控制器进行开启和关闭。
本实用新型还提供了一种物料运输系统,包括上述用于物品输送的机器人,其能够进行保密输送,适应更个性化的需求。
以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
一种用于物品输送的机器人及物料运输系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0