

IPC分类号 : B81B3/00,B81C5/00,B81C1/00,G01N13/00





专利摘要
本发明涉及一种工作在扭转模态下的谐振式微机械悬臂梁传感器及其电磁激励结构、制作方法及应用。其特征在于通过采用与悬臂梁扭转谐振模态的振形相匹配的优化布置电磁激励线圈,产生与悬臂梁扭转方向相同的洛仑兹力力矩激励起悬臂梁的扭转模态,即依据扭转模态振形曲线的极值位移点和不发生位移的振动节点位置布置驱动线圈,使交变驱动电流在各处均产生与悬臂梁扭转方向相同的洛仑兹力力矩,使驱动方式与扭转模态的振形完全匹配。本发明特点是结构简单、制作方便、容易实现。所述的传感器用于对肝癌早期预警的AFP抗原痕量检测一阶和二阶的扭转模态检测分辨率分别为3×10-14克和9×10-15克。
权利要求
1、一种扭转模态下的硅微机械悬臂梁传感器的电磁激励驱动方式,其特征在于通过采用与悬臂梁扭转谐振模态的振形相匹配的优化布置电磁激励线圈,产生与悬臂梁扭转方向相同的洛仑兹力力矩激励起悬臂梁的扭转模态,即依据扭转模态振形曲线的极值位移点和不发生位移的振动节点位置布置驱动线圈,使交变驱动电流在各处均产生与悬臂梁扭转方向相同的洛仑兹力力矩,使驱动方式与扭转模态的振形完全匹配。
2、按权利要求1所述的扭转模态下的硅微机械悬臂梁传感器的电磁激励驱动方式,其特征在于在微机械悬臂梁上采用四端压阻元件检测悬臂梁的扭转模态。
3、如权利要求1或2所述的扭转模态下的硅微机械悬臂梁传感器的电磁激励驱动方式的传感器驱动结构,其特征在于它由悬臂梁、振动敏感的四端压阻元件、驱动线圈和敏感部位的金薄膜组成,在外加磁场下,驱动线圈中的电流产生一个与悬臂梁扭转方向一致的洛仑兹力力矩,驱动悬臂梁一阶模态下扭转,四端压阻元件由于压阻效应引起横向电阻发生变化,实现振动信号输出,当驱动电流的频率与悬臂梁扭转模态的谐振频率相同时,悬臂梁在扭转模态谐振;对于二阶扭转模态,布置在悬臂梁的自由端和根部的驱动线圈相交叉而形成相互间方向相反,即电流流动相互间方向相反,线圈反转交叉处位于悬臂梁的二阶扭转模态的节点位置,悬臂梁自由端和靠根部分别产生方向相反的两组洛仑兹力力矩,这两个力的作用点和方向恰好与悬臂梁的二阶扭转模态振形相匹配。
4、按权利要求3所述的扭转模态下的硅微机械悬臂梁传感器的电磁激励驱动方式的传感器驱动结构,其特征在于一阶模态下扭转振动敏感的四端压阻元件布置悬臂梁的中部。
5、按权利要求3所述的扭转模态下的硅微机械悬臂梁传感器的电磁激励驱动方式的传感器驱动结构,其特征在于所述的二阶扭转模态的节点为相对于长度的0.51倍处。
6、制作如权利要求3所述的扭转模态下的硅微机械悬臂梁传感器的方法,其特征在于制作步骤为:
(1)采用N型SOI(绝缘体上的硅)硅片,将顶层硅减薄至悬臂梁厚度,热氧化形成表面氧化层;
(2)用光刻胶做掩模,光刻形成四端压阻的图形(如加工二阶扭转悬臂梁,需要同时形成铝引线交叉互联的掺杂区域光刻图形,一阶悬臂梁则不需要),采用离子注入工艺进行硼离子掺杂、在950℃-1150℃热退火10-60分钟活化注入的硼离子形成具有压阻效应的敏感电阻;
(3)用光刻胶做掩模,光刻形成压阻引线孔图形,用缓冲氢氟酸腐蚀掉氧化硅形成引线孔。溅射厚度在500纳米以上的铝薄膜,依次光刻、腐蚀、去胶,形成驱动线圈和压阻引线;在450℃-550℃合金化与压阻形成欧姆接触;驱动线圈是依据悬臂梁二阶模态振形函数曲线的极值位置精确计算设计的,利用光刻技术精确地形成驱动线圈的图形;
(4)用光刻胶做掩模,光刻形成悬臂梁结构图形,采用深反应离子刻蚀工艺正面刻蚀,形成悬臂梁结构。背面用光刻胶做掩模,双面光刻形成背面刻蚀图形,采用深反应离子刻蚀工艺刻蚀体硅至SOI中间氧化层,用缓冲氢氟酸腐蚀掉SOI中间氧化层,释放悬臂梁结构,完成悬臂梁器件制作。
7、按权利要求6所述的扭转模态下的硅微机械悬臂梁传感器的制作方法,其特征在于步骤(2)的敏感电阻的目标方块电阻在100-250Ω范围。
8、如权利要求3所述的扭转模态下的硅微机械悬臂梁传感器驱动结构的应用,其特征在于用于对肝癌早期预警的甲胎蛋白抗原痕量检测。
9、按权利要求7所述的扭转模态下的硅微机械悬臂梁传感器的应用,其特征在于检测时在悬臂梁表面的金薄膜衬底上固定甲胎蛋白抗体,当待测样品中存在AFP抗原时,通过选择性吸附作用被选择性吸附到悬臂梁表面,悬臂梁的转动惯量增加,扭转谐振频率降低,通过检测谐振频率的变化量测量出待测物的含量。
10、按权利要求7或8所述的扭转模态下的硅微机械悬臂梁传感器的应用,其特征在于悬臂梁一阶扭转模态下质量分辨率为3×10-14克,二阶扭转模态下质量分辨率为9×10-15克。
说明书
技术领域技术领域
本发明涉及一种扭转模态下的硅微机械悬臂梁传感器驱动结构、制作方法及应用,更确切地说,本发明涉及一种工作在一阶或二阶扭转模态的谐振式微机械悬臂梁传感器的电磁激励驱动方式、传感器驱动结构制作工艺及应用,具体而言,是通过采用与悬臂梁扭转谐振模态的振形相匹配的电磁激励线圈布置,产生与悬臂梁相应位置扭转方向相同的洛仑兹力扭矩激励起悬臂梁的扭转模态。本发明属于微机电系统和微机械传感器领域。
技术背景背景技术
谐振式微机械悬臂梁传感器由于具有高分辨率、高灵敏度、快速响应和数字式输出信号等特点,而被广泛应用于生化检测、压力敏感、惯性测量等传感技术领域,其中作为对特异性质量附着敏感的传感器在环境监测、医疗诊断等方面具有广阔的应用前景。该类传感器的核心部件是工作在谐振状态下的硅悬臂梁及其谐振驱动和压阻敏感元件。当通过生化特异性吸附将待测物吸附在悬臂梁表面时,悬臂梁等效质量的变化使悬臂梁固有谐振频率发生变化,通过检测该谐振频率的变化量能高精度地定量分析待测物的含量,其质量检测分辨率主要取决于谐振悬臂梁的品质因数(Q值)。已有的用于质量检测的谐振式微机械悬臂梁(Y. Li,O.Brand,H.Baltes,et al.,Very highQ-factor in water achieved by monolithic,resonant cantilever sensor with fullyintegrated feedback,Proceedings of 2nd IEEE Conference on Sensors,Oct.2003,Toronto,Canada,Vol.2,809-813)工作于基频的弯曲谐振模态,如图1(a)和(b)所示。弯曲模态是指悬臂梁在垂直于悬臂梁平面方向上进行上下振动,相对于弯曲模态,悬臂梁还可以绕悬臂梁长度方向的轴线进行转动,即扭转模态如图1(c)所示。相对于弯曲模态,扭转模态主要有两个特点:一是在空气环境工作时,受空气阻尼影响更小;二是微机械悬臂梁在扭转时,其应变为剪切应变,没有导致悬臂梁体积变化,而弯曲模态时的应变为拉伸或压缩应变,存在体积变化,这使微机械悬臂梁在扭转时的内损耗比弯曲模态时显著降低(如图1所示)。这些特点使扭转模态相比基频的弯曲模态具有更高的品质因数,改善其谐振频率稳定性,降低了噪声水平。在原子力显微镜探针中,利用悬臂梁扭转模态的上述特点,已经实现了成像质量的改善,获得了更高的图像分辨率(M.Reinstadtler,W.Arnold,et.al.,On the nanoscale measurementof friction using atomic-force microscope cantilever torsional resonances,Applied Physics Letters,Vol.82,2604-2606,2003)。
为了改善谐振式微机械悬臂梁生化传感器的质量检测分辨能力,通过激励起微机械悬臂梁的扭转模态,将获得比基频的弯曲模态更高的品质因数和谐振频率稳定性,进而改善质量检测分辨率;而激励更高阶的扭转模态将进一步提高品质因数,改善其谐振频率稳定性和质量检测分辨率。已有的悬臂梁的扭转模态是采用原子力显微镜中的剪切模态压电振子来激励的。这种激励方式不易于有效地激励起微机械悬臂梁的扭转模态。在需要高驱动效率的微机械悬臂梁生化传感器中,不适合采用这种激励方式。
发明内容发明内容
本发明的目的在于提供一种扭转模态下的硅微机械悬臂梁传感器驱动方式、结构、制作方法及应用。也即本发明试图通过电磁驱动方式激励微机械悬臂梁的扭转模态,提高品质因数的同时具有高灵敏度,来获得比现有的基频弯曲模态更高的品质因数、谐振频率稳定度和质量检测分辨率;通过激励高阶扭转模态可以进一步改善谐振频率稳定度和质量检测分辨率;通过采用与悬臂梁扭转谐振模态的振形相匹配的优化布置电磁激励线圈,产生与悬臂梁扭转方向相同的洛仑兹力力矩激励起悬臂梁的扭转模态,来提高品质因数。其基本思想及实现方法如下:依据扭转模态振形曲线的极值位移点和不发生位移的振动节点位置来布置驱动线圈,使交变驱动电流在各处均产生与悬臂梁扭转方向相同的洛仑兹力力矩,这样的驱动方式与扭转模态的振形完全匹配(如图2所示),能够更好地激励其扭转模态,获得高品质因数,提高其分辨率;在微机械悬臂梁上采用四端压阻元件检测悬臂梁的扭转模态。
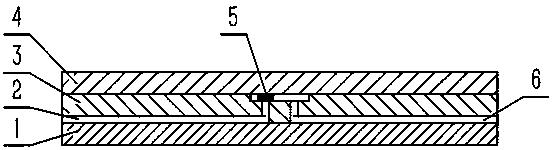
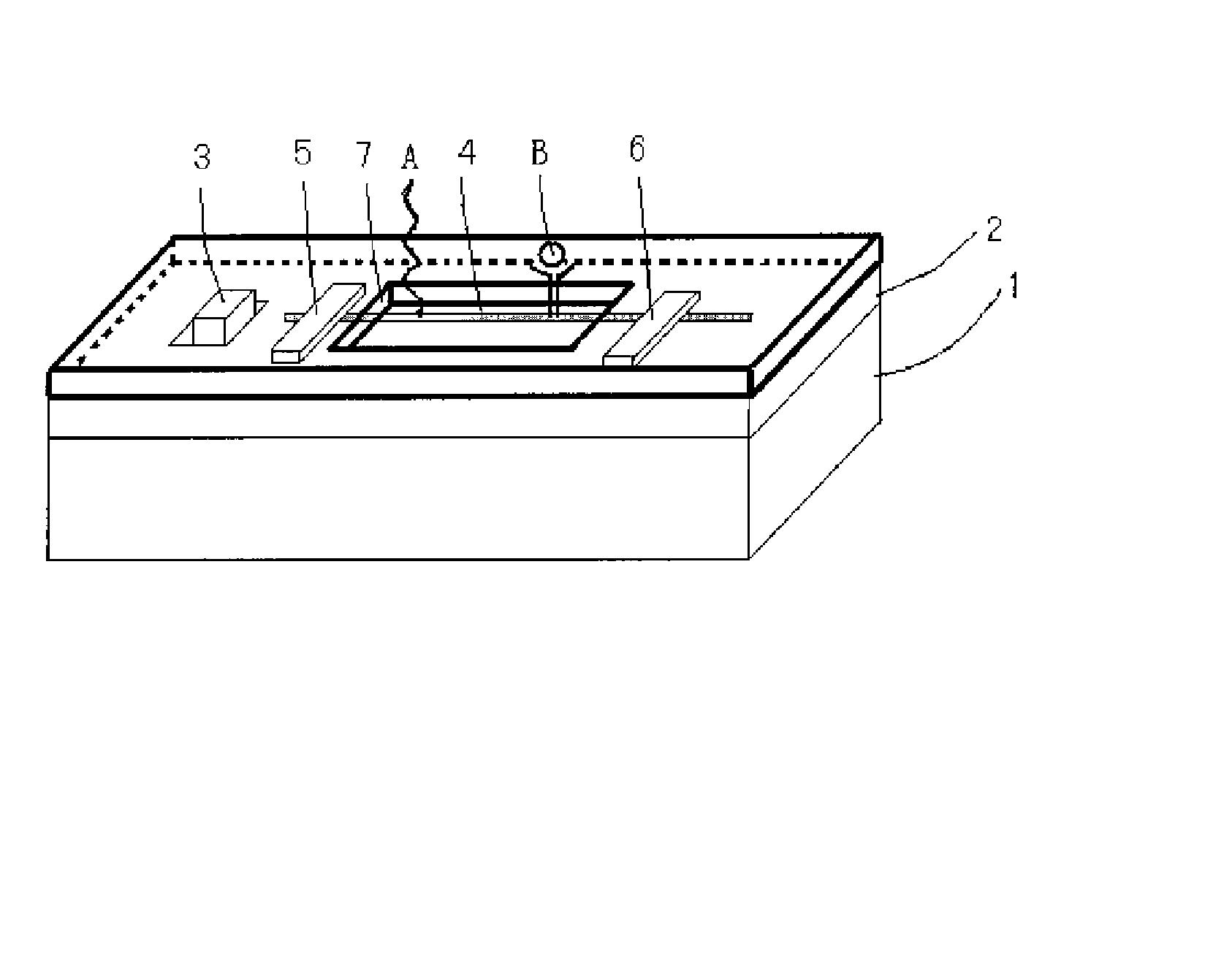
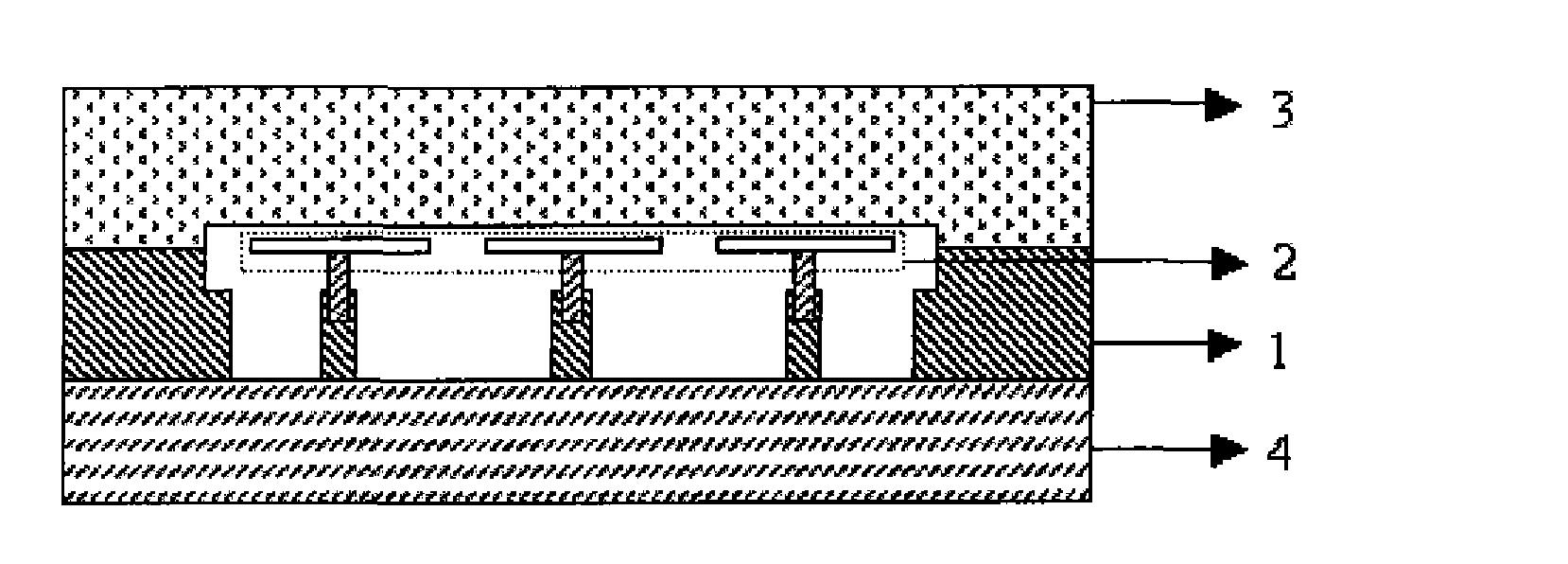
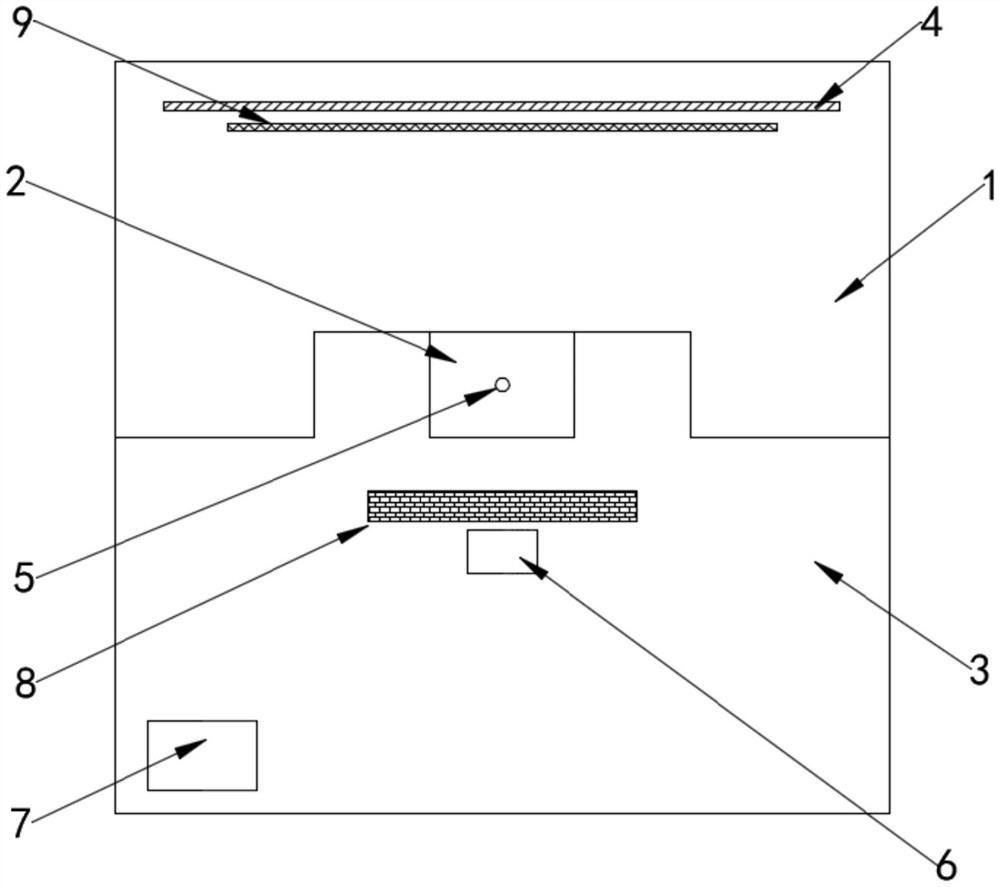
扭转谐振模态的微机械悬臂梁传感器驱动结构组成部分包括1.悬臂梁、2.振动敏感的四端压阻元件、3.驱动线圈和4.敏感部位的金薄膜。在外加磁场下,驱动线圈中的电流产生一个与悬臂梁扭转方向一致的洛仑兹力力矩,这个洛仑兹力力矩驱动悬臂梁扭转,四端压阻元件由于压阻效应引起横向电阻发生变化,实现振动信号输出,当驱动电流的频率与悬臂梁扭转模态的谐振频率相同时,悬臂梁在扭转模态谐振。对于二阶扭转模态,布置在悬臂梁的自由端和根部的驱动线圈相交叉而形成相互间方向相反(即电流流动相互间方向相反),线圈反转交叉处位于悬臂梁的二阶扭转模态的节点位置,约相对于长度的0.51倍处。这样在悬臂梁自由端和靠根部分别产生方向相反的两组洛仑兹力力矩,这两个力的作用点和方向恰好与悬臂梁的二阶扭转模态振形相匹配。由于线圈出现交叉,因此在该处衬底重掺杂通过悬臂梁表面的氧化硅层绝缘,实现驱动线圈的交叉。这种优化激励方式能够有效地激励其二阶扭转模态,进一步提高品质因数。现分别以悬臂梁的一阶扭转模态(如图2a)和二阶扭转模态(如图2b)为例,说明本发明基本原理如下:
如图2(a)和(c)所示,当悬臂梁在一阶扭转模态谐振时,悬臂梁中没有节点,悬臂梁自由端的扭转角最大。当待测物被特异性吸附到悬臂梁上时,悬臂梁的转动惯量增大,使悬臂梁的扭转谐振频率降低,通过检测频率值的变化来敏感吸附的质量。在悬臂梁自由端两侧制作了两个平板用于捕捉待测物质,平板上淀积了Cr/Au薄膜来进行表面修饰进而吸附检测物。。悬臂梁的尺寸设计遵循成熟的力学设计,并可以通过有限元软件模拟优化,力图使设计的灵敏度较高。另外在考虑平板两端伸出部分的长度时,一方面要使该长度不能太短以保证足够的敏感物质吸附质量,另一方面也不能使该长度过长而引起悬臂梁谐振频率的过度下降。设计中可根据具体制造工艺的精度,通过有限元软件的力学模拟优化来设计悬臂梁的几何尺寸。当一阶扭转模态悬臂梁的尺寸为:长300微米、宽100微米、厚3微米,平板宽度为100μm时,有限元软件ANSYS模拟结果表明平板向两侧伸出长度为75μm时,单位质量吸附引起的频率漂移量(即灵敏度)最大。(注:我们在本申请专利的实施例中给出了实用悬臂梁的具体尺寸,实际上采用本发明原理的具体悬臂梁设计尺寸可以根据具体情况有所变化,变化的范围根据采用具体的制造技术等因数来确定。)在悬臂梁所处平面内,施加与悬臂梁长度方向垂直的恒定磁场,在悬臂梁的边缘制作驱动线圈,通入交流电,在悬臂梁两侧产生方向始终相反的一对洛仑兹力,这两个力形成扭转悬臂梁的力矩。在悬臂梁中制作四端压阻元件来检测剪切应力,为获得最大的剪切应力灵敏度,悬臂梁采用n型(100)单晶硅片制作,采用p型杂质掺杂方法(离子注入或杂质扩散)在该种硅片上制作四端压阻元件,悬臂梁和四端压阻的长度方向均沿<100>方向布置。在一般力学教科书中都有介绍,或通过有限元程序模拟也可以得到:一阶扭转模态下梁的中部剪切应力比其它处更大,因此应该将四端压阻敏感器件布置于此来获得较大的检测信号。当悬臂梁扭转时,四端压阻元件将输出相应的电压信号,当电流的频率与悬臂梁的一阶扭转模态谐振频率相同时,悬臂梁在一阶扭转模态发生谐振,四端压阻的输出信号幅值达到最大,此时谐振的相位比驱动电流滞后90度。通过测试其扭转谐振频率就可以进行定量的质量检测,由于扭转模态具有相比基频的弯曲模态更高的品质因数,因此可以获得更高的谐振频率稳定度和质量检测分辨率。
如图2(b)和(d)所示,当悬臂梁在二阶扭转模态谐振时,悬臂梁存在一节点,当悬臂梁尺寸为300μm×100μm×3μm,平板尺寸为100μm×75μm×3μm时,有限元软件ANSYS模拟结果表明当平板尺寸位于距悬臂梁固支端47μm处时,质量检测灵敏度最大。悬臂梁在二阶扭转模态谐振时,腰部和自由端的扭转方向相反,中间存在一节点扭转角始终为零,对于上述尺寸的微机械悬臂梁,有限元程序ANSYS模拟结果表明谐振节点位于距悬臂梁固支端153μm处。为使洛仑兹力力矩与悬臂梁的扭转方向保持一致,要求悬臂梁腰部和自由端的驱动线圈电流方向相反,因此在此位置处驱动线圈交叉,使交变电流产生的洛仑兹力力矩与悬臂梁的扭转方向保持一致。悬臂梁和四端压阻的布置方向与一阶扭转模态相同。
本发明的谐振驱动线圈可以通过采用已有的微机械器件制作工艺,高精度地实现微机械悬臂梁、四端压阻和驱动线圈的制作。一阶和二阶扭转模态微机械悬臂梁的制作工艺相似,以下详述结构实现的制作工艺如下:
(1)采用N型SOI(绝缘体上的硅)硅片,将顶层硅减薄至悬臂梁厚度,热氧化形成表面氧化层。
(2)用光刻胶做掩模,光刻形成四端压阻的图形(如加工二阶扭转悬臂梁,需要同时形成铝引线交叉互联的掺杂区域光刻图形,一阶悬臂梁则不需要),采用离子注入工艺进行硼离子掺杂、在950℃-1150℃热退火10-60分钟活化注入的硼离子形成具有压阻效应的敏感电阻,其目标方块电阻值在100-250欧姆范围内。
(3)用光刻胶做掩模,光刻形成压阻引线孔图形,用缓冲氢氟酸腐蚀掉氧化硅形成引线孔。溅射厚度在500纳米以上的铝薄膜,依次光刻、腐蚀、去胶,形成驱动线圈和压阻引线。在450℃-550℃合金化与压阻形成欧姆接触。驱动线圈是依据悬臂梁二阶模态振形函数曲线的极值位置精确计算设计的,利用光刻技术精确地形成驱动线圈的图形。
(4)用光刻胶做掩模,光刻形成悬臂梁结构图形,采用深反应离子刻蚀工艺正面刻蚀,形成悬臂梁结构。背面用光刻胶做掩模,双面光刻形成背面刻蚀图形,采用深反应离子刻蚀工艺刻蚀体硅至SOI中间氧化层,用缓冲氢氟酸腐蚀掉SOI中间氧化层,释放悬臂梁结构,完成悬臂梁器件制作。
综上所述,本发明的主要优点是:
(1)通过激励悬臂梁的扭转模态可以获得比基频的弯曲模态更高的品质因数,从而获得更高的谐振频率稳定度和质量检测分辨率;
(2)通过激励更高阶扭转模态可以进一步提高品质因数,改善悬臂梁的性能;
(3)依据扭转模态振形函数特点来线圈布置方式,产生与高阶扭转谐振模态振形相匹配洛仑兹驱动力力矩,更好地激励悬臂梁的高阶扭转谐振模态。
附图说明附图说明
图1(a)常采用的弯曲模态微机械悬臂梁,
图1(b)微机械悬臂梁的弯曲模态,
图1(c)微机械悬臂梁的扭转模态。
图2(a)一阶扭转模态振形与其电磁激励结构示意图。
图2(b)二阶扭转模态振形与其优化电磁激励结构示意图。
图2(c)一阶扭转模态振形与其电磁激励方式产生的洛仑兹力示意图。
图2(d)二阶扭转模态振形与其优化电磁激励方式产生的洛仑兹力示意图。
图3采用本发明的扭转模态谐振式硅微机械压阻悬臂梁制作工艺流程图。
(a)SOI硅片氧化;(b)压阻制作,腐蚀出引线孔;(c)制作铝压阻引线和驱动线圈;(d)溅射铬钝化层;(e)蒸发金薄膜;(f)正面和背面刻蚀,释放悬臂梁结构。
图4(a)采用本发明的一阶扭转模态谐振式硅微机械压阻悬臂梁生化传感器扫描电镜照片,
图4(b)采用本发明的二阶扭转模态谐振式硅微机械压阻悬臂梁生化传感器扫描电镜照片,
图4(c)常采用的工作于基频弯曲模态的谐振式硅微机械压阻悬臂梁生化传感器扫描电镜照片。
图5(a)二阶扭转模态谐振式硅微机械压阻悬臂梁平面布局的顶视示意图
图5(b)一阶扭转模态谐振式硅微机械压阻悬臂梁平面布局的顶视示意图
图6(a)常采用的工作于基频弯曲模态的谐振式硅微机械压阻悬臂梁的谐振性质,
图6(b)采用本发明的一阶扭转模态谐振式硅微机械压阻悬臂梁的谐振性质,
图6(c)采用本发明的二阶扭转模态谐振式硅微机械压阻悬臂梁的谐振性质。
图7(a)常采用的工作于基频弯曲模态的谐振式硅微机械压阻悬臂梁生化传感器频率稳定度和生化敏感性质,
图7(b)采用本发明的一阶扭转模态谐振式硅微机械压阻悬臂梁生化传感器频率稳定度和生化敏感性质,
图7(c)采用本发明的二阶扭转模态谐振式硅微机械压阻悬臂梁生化传感器频率稳定度和生化敏感性质。
图中:B-恒定磁场 i-驱动电流
F-洛仑兹力 -电流方向流入纸面
1-悬臂梁 2-振动敏感的四端压阻元件
3-驱动线圈 4-敏感部位的金薄膜
具体实施方式具体实施方式
下面通过具体实施的器件为例,进一步阐明本发明的实质性特点和显著进步,但本发明并非仅限于所述实例。
实施例1,具有二阶扭转模态激励方式的微机械悬臂梁
采用了本发明的二阶扭转模态电磁驱动方式悬臂梁,悬臂梁设计长度为300微米、宽度为100微米、厚度为3微米,具体尺寸如图5(a)所示。铝线厚度为700纳米且宽度5微米,悬臂梁中部的铝线中心位于悬臂梁固支端142.5微米处,即悬臂梁相对长度的0.475倍。铬薄膜厚度为500纳米,宽度7微米,铬线比铝线宽度两侧各宽出1微米。四端压阻输出悬臂梁扭转振动信号。将一永磁体与悬臂梁封装在一个封装体系内且固定于悬臂梁的侧面,产生的磁场与悬臂梁长度方向垂直。为便于比较研究,制作了工作于基频弯曲模态的悬臂梁,尺寸与扭转模态微机械悬臂梁的基本尺寸一致:长度为300微米、宽度为100微米、厚度为3微米。作为对比,图4(a)给出了经过上述工艺的一阶扭转模态硅微机械悬臂梁传感器的电镜照片,该一阶扭转模态悬臂梁的尺寸为:长300微米、宽100微米、厚3微米,平板宽度为100μm,向两侧伸出长度为75μm[见图5(b)]。图4(b)给出了二阶扭转模态硅微机械悬臂梁生化传感器的电镜照片。图4(c)则给出了采用上述工艺制作的传统的工作于基频模态的微机械悬臂梁传感器的电镜照片。
由图6(c)所示的测试结果可以看到,二阶扭转谐振模态悬臂梁的谐振频率为约509kHz,其闭环品质因数可达10257,远高于基频弯曲模态的1258。
器件制作工艺流程如图3所示,并详述如下:
(a)采用N型SOI(绝缘体上的硅)硅片,将顶层硅减薄至悬臂梁厚度,热氧化形成2000埃的氧化层(见图3-a);
(b)用光刻胶做掩模,光刻出敏感电阻的图形,采用离子注入工艺进行硼离子掺杂、在1000℃退火30分钟活化注入的硼离子形成具有压阻效应的敏感电阻,其方块电阻值为160欧姆(见图3-b);
(c)用光刻胶做掩模,光刻出压阻引线孔图形,用缓冲氢氟酸腐蚀掉氧化硅形成引线孔。溅射厚度在7000埃以上的铝薄膜,依次光刻、腐蚀、去胶,同时形成优化布置的驱动线圈和压阻引线。在480℃合金化30分钟与压阻形成欧姆接触。驱动线圈是依据悬臂梁二阶模态振形函数曲线的极值位置精确计算设计的,利用光刻技术精确地形成驱动线圈的图形(见图3-c);
(d)溅射5000埃以上的铬薄膜,依次光刻、腐蚀、去胶,形成完全覆盖铝线圈表面和侧壁的铬线圈,考虑到工艺误差,铬线圈的宽度比铝线圈两侧各宽出1微米(见图3-d);
(e)在硅片上涂光刻胶,光刻显影,蒸发金薄膜,采用剥离工艺形成金薄膜(见图3-e);
(f)用光刻胶做掩模,光刻形成悬臂梁结构图形,采用深反应离子刻蚀工艺正面刻蚀,形成悬臂梁结构。背面用光刻胶做掩模,双面光刻形成背面刻蚀图形,采用深反应离子刻蚀工艺刻蚀体硅至SOI中间氧化层,用缓冲氢氟酸腐蚀掉SOI中间氧化层,释放悬臂梁结构,完成悬臂梁器件制作(见图3-f)。
实施例2,AFP(甲胎蛋白)传感器
以可以对肝癌早期预警的AFP(甲胎蛋白)抗原痕量检测的一阶扭转模态谐振式硅微机械压阻悬臂梁和二阶扭转模态谐振式微机械悬臂梁传感器为例详细说明扭转模态的质量检测效果和实施方式。二阶扭转模态悬臂梁结构尺寸与实施例1中相同。一阶扭转模态悬臂梁的尺寸为:长300微米、宽100微米、厚3微米,平板宽度为100μm,向两侧伸出长度为75μm[见图5(b)],铝厚度为700纳米且宽度5微米。两种悬臂梁传感器工作原理如下:在悬臂梁表面的金薄膜衬底上固定AFP抗体,当待测样品中存在AFP抗原时,通过选择性吸附作用被选择性吸附到悬臂梁表面,悬臂梁的转动惯量增加,扭转谐振频率降低,通过检测谐振频率的变化量就可以测量待测物的含量。采用本发明的扭转模态谐振式硅微机械压阻悬臂梁传感器和二阶扭转模态谐振式微机械悬臂梁传感器具有比传统的工作于基频模态的传感器更高的质量分辨率,能够探测到浓度更低的AFP抗原,这为早期肝癌诊断提供了更加有效、可靠的技术检测手段。
在该器件中,一阶扭转模态微机械悬臂梁的谐振频率为约115kHz,二阶扭转谐振模态悬臂梁的谐振频率为509kHz,其质量检测分辨率分别为3×10-14克和9×10-15克。
器件制作工艺流程与实施例1相同。
图6和图7分别给出了采用这两种电磁激励方式的悬臂梁的品质因数和质量灵敏度。从图6给出的测试结果可以看出,悬臂梁的一阶扭转模态的闭环品质因数是3687(见图6-b);而采用悬臂梁的二阶扭转模态品质因数达到10257(见图6-c),而工作于基频弯曲模态的微机械悬臂梁的品质因数为1258(见图6-a)。因此一阶和二阶扭转模态的品质因数均显著高于基频弯曲模态的品质因数。在本实例中,测量到的悬臂梁一阶扭转模态下频率相对稳定度是7.6×10-7(见图7-b),质量分辨率为3.9×10-14克;二阶扭转模态的频率相对稳定度是1.8×10-7(见图7-c),质量分辨率为9×10-15克;而基频弯曲模态的频率稳定度是2.1×10-6(见图7-a),质量分辨率为3.1×10-13克。这说明采用激励微机械悬臂梁的扭转模态,可以获得了更大的谐振品质因数,显著改善了谐振频率稳定度和传感器质量分辨率,进而使悬臂梁传感器的性能获得了提高。
扭转模态下的硅微机械悬臂梁传感器驱动结构、制作方法及应用专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0