









专利摘要
本发明公开了一种基于神经网络及粒子群算法的固态发酵控制方法,其目的是为了解决现有固态发酵技术中存在的发酵物料数据无法实时检测故无法实时控制的问题。本方法步骤为:1.初始化训练数据,训练神经网络,开始发酵过程;2.基于神经网络,由粒子群算法,求解合适的外界输入参量;3.由实时数据,训练神经网络;4.判断是否进行人工取样测量,若是,则取样测量,并由测量数据训练神经网络;5.判断发酵过程是否结束,若是,则停止循环;若否,则返回步骤2。本发明进行固态发酵所需人工采样次数远小于传统固态发酵的人工定时采样次数,提高了固态发酵生产效率,避免多次采样易造成污染的问题。
权利要求
1.一种基于神经网络及粒子群算法的固态发酵控制方法,其特征在于,包括以下步骤:
1)将固态发酵设备流入流出空气温度差、湿度差、空气流量以及机械搅拌速率作为输入参量,将固态物料温度、湿度、pH值作为输出参量,建立神经网络一,根据已有的历史生产数据,使用BP神经网络,附加动量学习规则,训练神经网络一;将流入固态发酵设备空气的温度、湿度、空气流量、机械搅拌速率作为输入变量,将流入流出空气温度差、湿度差作为输出变量,建立神经网络二,使用BP神经网络,附加动量学习规则,训练神经网络二;
2)根据固态发酵时所需的固态物料的温度、湿度、pH值的理想值,由粒子群算法,求解神经网络一的最优输入参量,即流入流出空气温度差、湿度差、空气流量以及机械搅拌速率;再次使用粒子群算法,基于神经网络一最优输入参量,固定神经网络二中机械搅拌速率与空气流量,寻找最优输入量中的流入空气温度、湿度,使得神经网络二的输出拟合神经网络一最优输入参量;
3)根据实时的测量数据,即流入固态发酵设备空气温度、湿度、空气流量,以及流出发酵设备空气的流量、温度、湿度以及机械搅拌速率,使用附加动量学习规则,更新训练神经网络二;
4)根据上一循环神经网络估计误差判断是否需要人工采样,如需要,通过人工采样然后离线分析,对比得出实测固态物料的温度、湿度、pH值与神经网络估计出的固态物料温度、湿度、pH值的误差,然后将这组实测固态物料的温度、湿度、pH值与实时测得的流入流出空气温度差、湿度差、空气流量以及机械搅拌速率数据一起,使用附加动量学习规则,更新训练神经网络一;如不需要人工采样,则转步骤5);
5)如果发酵过程结束,则停止循环;如果发酵过程未结束,则返回步骤2)。
2.如权利要求1所述的基于神经网络及粒子群算法的固态发酵控制方法,其特征在于,所述粒子群算法,步骤如下:
1)初始化粒子群:确定粒子群大小NP,粒子群算法迭代次数NG,初始化粒子位置,计算每个粒子的适应度并初始化全局最优解与个体最优解;
计算粒子适应度的函数为、
其中,Oi表示神经网络输出向量的第i个元素,Oi'为理论期望的输出向量的第i个元素;
2)更新粒子群、粒子群的运动方程如下:
v(t)=ω·v(t-1)+c1·(lbest-x(t))+c2·(gbest-x(t))
x(t+1)=x(t)+c3·v(t)
其中ω取为 i为粒子群算法的本次迭代次数,c1,c2,c3为常数,lbest为每个粒子搜索过的个体最优解,gbest为所有粒子搜索过的全局最优解;
3)计算本次迭代的粒子适应度,更新个体最优解与全局最优解、即对每个粒子,将本次迭代产生的适应度,与当前个体最优解相比,取适应度较小的为个体最优解,与所有粒子搜索过的全局最优解相比,取适应度较小的为全局最优解;
4)判断是否达到迭代NG次,若是,则输出全局最优解,若否,则返回步骤2)。
3.如权利要求2所述的基于神经网络及粒子群算法的固态发酵控制方法,其特征在于,所述粒子群算法步骤2)的c1,c2取值为2,c3取值为0.5。
4.如权利要求1所述的基于神经网络及粒子群算法的固态发酵控制方法,其特征在于,所述附加动量学习法,更新规则如下式:
其中Δω(t)=ω(t)-ω(t-1),ET为神经网络的训练误差,η为权重,a为动量因子,取0.95。
说明书
技术领域
本发明涉及一种固态发酵控制方法,尤其涉及一种基于神经网络及粒子群算法的固态发酵控制方法,属于生物工程设备技术领域。
背景技术
固态发酵是指在没有或几乎没有自由流动水存在的状态下,在有一定湿度的水不溶性基质中,用一种或多种微生物进行生物反应的生产过程。与其他培养方式相比,固态发酵具有如下基本特点:1、设备能耗低;2、产物的产率高;3、无“三废”排放污染,易使生产企业实现清洁生产工艺。因此,二十世纪90年代以来,随着能源危机与环境问题的日益严重,固态发酵技术以其特有的优点引起人们广泛的兴趣。在生物燃料、生物农药和生长剂、生物肥料、生物转化、工业废弃物生物解毒及对危险复合物进行生物修复和降解等方面得到应用。
在固态发酵过程中,反映发酵状态的关键物理量为固态物料的温度、湿度、pH值,这三大物理参量是直接决定良好固态发酵过程的物理环境。在工业中,由于技术、设备限制,对这三大物理参量的测量与控制往往采用的方法是人工间隔数小时采样一次,再使用生物仪器做离线分析,得出这三大关键物理量,以此进一步调节外部输入环境(如流入发酵设备空气的流量、温度、湿度、搅拌速度等),以控制发酵过程。由于前述工业生产实际中技术、成本、设备等因素的限制,很难实时的获知在发酵过程中这三大物理量的准确值,因而无法准确、实时调节这三大关键物理量,使得现有的固态发酵效率并不是很高。
发明内容
本发明的目的在于提供一种基于神经网络及粒子群算法的固态发酵控制方法,解决现有技术中,由于技术、设备限制不能在线实时检测固态物料的温度、湿度、pH值物理参量,而采用频繁的人工间隔采样,再使用生物仪器做离线分析以控制发酵过程,易造成固态发酵生产效率低,多次采样易造成污染的问题。
本发明的目的通过以下技术方案予以实现:
一种基于神经网络及粒子群算法的固态发酵控制方法,包括以下步骤:
1)将固态发酵设备流入流出空气温度差、湿度差、空气流量以及机械搅拌速率作为输入参量,将固态物料温度、湿度、pH值作为输出参量,建立神经网络一,根据已有的历史生产数据,使用BP神经网络,附加动量学习规则,训练神经网络一;将流入固态发酵设备空气的温度、湿度、空气流量、机械搅拌速率作为输入变量,将流入流出空气温度差、湿度差作为输出变量,建立神经网络二,使用BP神经网络,附加动量学习规则,训练神经网络二;
2)根据固态发酵时所需的固态物料的温度、湿度、pH值的理想值,由粒子群算法,求解神经网络一的最优输入参量,即流入流出空气温度差、湿度差、空气流量以及机械搅拌速率;再次使用粒子群算法,基于神经网络一最优输入参量,固定神经网络二中机械搅拌速率与空气流量,寻找最优输入量中的流入空气温度、湿度,使得神经网络二的输出拟合神经网络一最优输入参量;
3)根据实时的测量数据,即流入固态发酵设备空气温度、湿度、空气流量,以及流出发酵设备空气的流量、温度、湿度以及机械搅拌速率,使用附加动量学习规则,更新训练神经网络二;
4)根据上一循环神经网络估计误差判断是否需要人工采样,如需要,通过人工采样然后离线分析,对比得出实测固态物料的温度、湿度、pH值与神经网络估计出的固态物料温度、湿度、pH值的误差,然后将这组实测固态物料的温度、湿度、pH值与实时测得的流入流出空气温度差、湿度差、空气流量以及机械搅拌速率数据一起,使用附加动量学习规则,更新训练神经网络一;如不需要人工采样,则转步骤5);
5)如果发酵过程结束,则停止循环;如果发酵过程未结束,则返回步骤2)。
本发明的目的还可以通过以下技术措施来进一步实现:
前述基于神经网络及粒子群算法的固态发酵控制方法,其中粒子群算法,步骤如下:
1)初始化粒子群:确定粒子群大小NP,粒子群算法迭代次数NG,初始化粒子位置,计算每个粒子的适应度并初始化全局最优解与个体最优解;
计算粒子适应度的函数为:
其中,Oi表示神经网络输出向量的第i个元素,Oi'为理论期望的输出向量的第i个元素;
2)更新粒子群:粒子群的运动方程如下:
v(t)=ω·v(t-1)+c1·(lbest-x(t))+c2·(gbest-x(t))
x(t+1)=x(t)+c3·v(t)
其中ω取为 i为粒子群算法的本次迭代次数,c1,c2,c3为常数,lbest为每个粒子搜索过的个体最优解,gbest为所有粒子搜索过的全局最优解;
3)计算本次迭代的粒子适应度,更新个体最优解与全局最优解:即对每个粒子,将本次迭代产生的适应度,与当前个体最优解相比,取适应度较小的为个体最优解,与所有粒子搜索过的全局最优解相比,取适应度较小的为全局最优解;
4)判断是否达到迭代NG次,若是,则输出全局最优解,若否,则返回步骤2)。
前述基于神经网络及粒子群算法的固态发酵控制方法,其中粒子群算法步骤2)的c1,c2取值为2,c3取值为0.5。
前述基于神经网络及粒子群算法的固态发酵控制方法,其中附加动量学习法,更新规则如下式:
其中Δω(t)=ω(t)-ω(t-1),ET为神经网络的训练误差,η为权重,a为动量因子,取0.95。
与现有技术相比,本发明的有益效果是:本发明通过两个神经网络建立了容易实时测量的辅助变量和难以测量的目标主导变量之间的映射关系,实现了固态物料温度、湿度、pH值的软测量。本发明通过实时调节控制固态发酵过程的外部输入参量,进而控制固态物料的温度、湿度、pH值三大物理参量,使得发酵反应更高效。本发明进行固态发酵所需人工采样次数远小于传统固态发酵的人工定时采样次数,提高了固态发酵生产效率,避免多次采样易造成污染的问题。本发明通过使用两个神经网络将实时检测数据训练与人工离散取样训练分离,最大化利用了现有数据,使得整个控制过程更加可靠有效。
附图说明
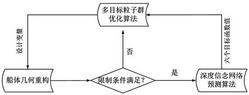
图1是本发明控制方法流程图;
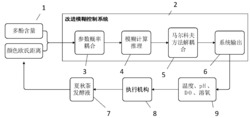
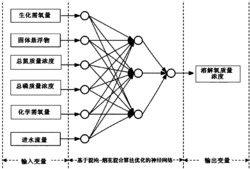
图2是本发明的逻辑结构示意图;
图3是本发明中粒子群算法流程图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
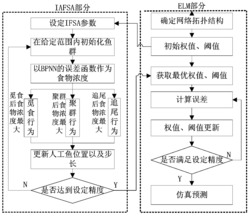
在固态发酵过程中空气的流量、流入发酵设备空气的温度、湿度以及流出发酵设备、温度、湿度可以实时测得,而固态物料的温度、湿度、pH值这三大物理量却难以测得且对发酵问题十分重要,本发明首先使用一个神经网络建立由流入流出发酵设备空气的温度差、湿度差、空气流量、搅拌速率与固态发酵物料的温度、湿度、pH值之间的映射关系,再使用另一个神经网络建立由流入设备空气的流量、温度、湿度、搅拌速度与流入流出发酵设备空气的温度差、湿度差之间的映射关系,最后通过粒子群算法寻找输入物理参量最优解并更新输入物理参量,如图1所示,其具体实现步骤如下:
1)初始化训练数据,训练神经网络,并开始发酵过程。
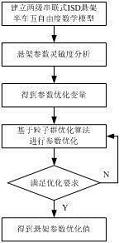
基于以往对于发酵过程的生产、实验数据,统计出流入发酵设备空气的流量、温度、湿度,流出发酵设备空气、温度、湿度,机械搅拌速率,固态物料温度、湿度、pH值的数据,求得流入流出发酵设备空气的温度差、湿度差;将温度差、湿度差、空气流量以及机械搅拌速率作为输入参量,固态物料温度、湿度、pH值作为输出参量,使用BP神经网络,附加动量学习规则,训练神经网络一;将流入发酵设备空气的温度、湿度、空气流量、搅拌速率作为输入变量,流入流出空气的温度差、湿度差作为输出变量,同样使用BP神经网络,附加动量学习规则,训练估计神经网络二。如图2所示是逻辑结构示意图,此逻辑结构图示意本发明中各个数据的流向。
附加动量学习规则是在传统BP学习方法基础上,在加权调节时赋予更新动量,这样可以调出训练的局部最优解,具体更新规则如下式:
其中Δω(t)=ω(t)-ω(t-1),ET为神经网络的训练误差,η为权重,a为动量因子,取0.95。
2)由粒子群算法,求解合适的外界输入参量。
根据固态发酵时所需的固态物料的温度、湿度、pH值的理想值,由粒子群算法,求解神经网络一的最优输入参量,即流入流出空气温度差、湿度差、空气流量以及机械搅拌速率;再次使用粒子群算法,基于神经网络一最优输入参量,固定神经网络二中机械搅拌速率与空气流量,寻找最优输入量中的流入空气温度、湿度,使得神经网络二的输出拟合神经网络一最优输入参量。
如图3所示,所述粒子群算法步骤如下:
(1)初始化粒子群:确定粒子群大小NP,粒子群算法迭代次数NG,初始化粒子位置,计算每个粒子的适应度并初始化全局最优解与个体最优解;
计算粒子适应度的函数为:
其中,Oi表示神经网络输出向量的第i个元素,Oi'为理论期望的输出向量的第i个元素;
(2)更新粒子群:粒子群的运动方程如下:
v(t)=ω·v(t-1)+c1·(lbest-x(t))+c2·(gbest-x(t))
x(t+1)=x(t)+c3·v(t)
其中ω取为 i为粒子群算法的本次迭代次数,c1,c2,c3为常数,优选c1,c2取值为2,c3取值为0.5,lbest为每个粒子搜索过的个体最优解,gbest为所有粒子搜索过的全局最优解;
(3)计算本次迭代的粒子适应度,更新个体最优解与全局最优解:即对每个粒子,将本次迭代产生的适应度,与当前个体最优解相比,取适应度较小的为新的个体最优解,与所有粒子搜索过的全局最优解相比,取适应度较小的为新的全局最优解;
(4)判断是否达到迭代NG次,若是,则输出全局最优解,若否,则返回步骤(2)。
3)根据实时的测量数据,即流入固态发酵设备空气温度、湿度、空气流量,以及流出发酵设备空气的流量、温度、湿度以及机械搅拌速率,使用附加动量学习规则,更新训练神经网络二。
4)根据上一循环神经网络估计误差判断是否需要人工采样。
由于神经网络一建立了流入流出发酵设备空气的温度差、湿度差、空气流量、搅拌速率与固态发酵物料的温度、湿度、pH值之间的映射关系,神经网络经过训駏以后,可以用可测的温度差、湿度差、空气流量、搅拌速率等参数估计出不能直接测量的固态物料温度、湿度、pH值,实现了固态物料温度、湿度、pH值的软测量。
本方法依据上一循环人工采样所得的固态物料温度、湿度、pH值数据与神经网络估计数据的误差来判断本次是否需要人工采样,其规则为:若上次人工采样数据与神经网络数据误差较小,则延长下次人工采样与本次采样的间隔时间,若本次人工采样采样数据与神经网络数据误差较大,则缩小下次人工采样与本次采样的间隔时间;具体的采样间隔时间则需根据实际发酵问题对发酵效率的要求决定。由于本发明采用基于神经网络及粒子群算法,基于以往发酵过程的生产、实验数据,对神经网络不断更新训练,固态物料温度、湿度、pH值的估计值逼近于实测值,神经网络估计误差较小,本发明进行固态发酵所需人工采样次数远小于传统固态发酵的人工定时采样次数,提高了固态发酵生产效率。
根据以上判断结果,如需要人工采样,则通过人工采样然后离线分析,对比得出实测固态物料的温度、湿度、pH值与神经网络估计出的固态物料温度、湿度、pH值的误差,然后将这组实测固态物料的温度、湿度、pH值与实时测得的流入流出空气温度差、湿度差、空气流量以及机械搅拌速率数据一起,使用附加动量学习规则,更新训练神经网络一;如不需要人工采样,则转步骤5);
5)如果发酵过程结束,则停止循环;如果发酵过程未结束,则返回步骤2)。
除上述实施例外,本发明还可以有其他实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围内。
基于神经网络及粒子群算法的固态发酵控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0