

IPC分类号 : E01F11/00,G01G19/03,G01S13/42,G01S13/58,G01S13/72







专利摘要
本发明公开了一种桥面车辆荷载识别装置、桥梁及桥梁荷载分布识别方法,涉及桥梁检测领域,包括雷达跟踪定位系统、动态称重系统和数据处理设备,雷达跟踪定位系统包括至少一组雷达组,雷达组包括三个雷达,雷达用于设置桥梁上采集第一类车辆数据,动态称重系统用于间隔设置于桥面以采集第二类车辆数据,数据处理设备获取第一类车辆数据和第二类车辆数据,数据处理设备根据时钟信息和第一类车辆数据计算得到与时间关联的车辆行驶轨迹,并结合第二类车辆数据和与时间关联的车辆行驶轨迹得到车辆对桥面作用荷载的空间分布,本发明能够获取任意时刻桥面车辆对桥面作用荷载的空间分布。
权利要求
1.一种桥面车辆荷载识别装置,其特征在于,包括:
雷达跟踪定位系统(1),所述雷达跟踪定位系统(1)包括至少一组雷达组(11),所述雷达组(11)包括三个雷达(12),所述雷达(12)用于设置桥梁上采集第一类车辆数据,所述第一类车辆数据至少包括车辆在桥面上的经度、纬度和速度;
动态称重系统(2),所述动态称重系统(2)用于间隔设置于桥面以采集第二类车辆数据,所述第二类车辆数据至少包括车辆轴重、轴距和速度信息;
数据处理设备(3),所述数据处理设备(3)获取第一类车辆数据和第二类车辆数据,所述数据处理设备(3)根据雷达时钟信息和所述第一类车辆数据计算得到与时间关联的车辆行驶轨迹,并结合所述第二类车辆数据和所述与时间关联的车辆行驶轨迹得到车辆对桥面作用荷载的空间分布。
2.如权利要求1所述的装置,其特征在于:所述雷达跟踪定位系统(1)用于采集的数据包括车流量、平均车速、车头时距、车辆间距、车辆经度、车辆纬度和车辆速度。
3.如权利要求1所述的装置,其特征在于:所述动态称重系统(2)用于采集的数据包括车辆速度、车辆总重、车辆轴重、车辆轴距和车辆车道分布。
4.如权利要求1所述的装置,其特征在于:所述雷达跟踪定位系统(1)包括雷达采集模块,所述雷达采集模块与所述雷达组(11)和数据处理设备(3)相连。
5.一种设有如权利要求1所述装置的桥梁,其特征在于:
所述雷达组(11)设于桥梁的桥塔或路灯上;
桥梁的桥面两端设有所述动态称重系统(2),所述动态称重系统(2)安装在所述雷达跟踪定位系统(1)探测区域内。
6.如权利要求5所述的桥梁,其特征在于:每组所述雷达组(11)内三个所述雷达(12)分别朝向桥面两端和桥面,且朝向桥面的所述雷达(12)探测区域与另两所述雷达(12)探测区域均部分重叠。
7.如权利要求6所述的桥梁,其特征在于:相邻两组所述雷达组(11)的探测区域部分重叠。
8.如权利要求5所述的桥梁,其特征在于:所述桥面两端设有一机柜,所述机柜内设有所述数据处理设备(3)。
9.一种使用如权利要求1所述装置的桥梁荷载分布识别方法,其特征在于,包括如下步骤:
S1、在待监测桥梁的桥塔或路灯上布置雷达跟踪定位系统(1),在待监测桥梁的桥面两端布置动态称重系统(2)与数据处理设备(3);
S2、数据处理设备(3)对第一类车辆数据进行数据时空对准处理,并将不同雷达(12)对同一目标车辆采集的第一类车辆数据统一到相同的时间坐标轴,通过计算相关系数来进行目标在多雷达间的关联,完成时间对准、空间对准和行驶轨迹关联后,对多个独立雷达(12)采集的第一类车辆数据进行融合计算,获得车辆在桥梁连续的行驶轨迹;当该车辆通过动态称重系统(2)后,记录车辆的轴重、轴距和速度信息,根据该车辆的车速与雷达跟踪定位系统(1)检测数据进行匹配,将动态称重系统(2)测得的轴重和轴距信息赋予相应车辆;
S3、以一侧桥梁端部为坐标系原点,重复步骤S2,绘制在桥面上的每辆车的行驶轨迹,并获得每辆车的车重、轴重和轴距信息,截取任意时刻桥面上车辆经度和纬度,获取任意时刻桥面车辆对桥面作用荷载的空间分布。
10.如权利要求9所述的识别方法,其特征在于:所述雷达跟踪定位系统(1)和动态称重系统(2)的数据采集同步。
说明书
技术领域
本发明涉及桥梁检测领域,具体涉及一种桥面车辆荷载识别装置、设有该装置的桥梁及识别方法。
背景技术
车辆荷载是桥梁结构承受的主要外荷载,采用现有技术研究人员难以准确获取结构承受的实际车辆荷载。其主要原因是受环境、交通管制和桥梁所处地界的影响,在桥梁上通行的车辆也存在较大的不确定性;另外,由于桥梁上的车辆型号、车辆重量、轴重和车速的不同,也增加了获取桥上车辆荷载分布的难度;导致设计规范中的车辆荷载模型与桥梁实际承受的荷载并不一致,荷载输入的不确定导致难以根据结构响应监测数据评估桥梁的安全状况,有研究人员对桥面通行车辆进行统计分析,获得桥梁车辆荷载模型以分析车辆荷载效应。但是该方法获取的是一种固定的车辆加载模式,无法准确反映极端情况下的桥上车辆分布;且该方法难以与结构实时响应数据联合分析,不能准确分析桥面车辆荷载与结构响应的对应关系。
目前,桥梁车辆荷载检测技术主要有以下两种。一种,是以动态称重系统为基础,准确测得桥面通行车辆的重量与速度,通过统计分析的方法获得桥面车辆荷载概率分布模型,但是该方法不能得到桥面车辆的空间分布,难以掌握车辆荷载的作用历程。另外一种,则是在桥面布置多个摄像头,通过图像的方法来获取车辆的空间分布;该方法不能准确获知掌握车辆的重量,且因图像识别技术的限制,车辆空间分布精度较差,夜间无法识别,难以掌握全部桥面的车辆状况。
发明内容
针对现有技术中存在的缺陷,本发明的目的在于提供一种桥面车辆荷载识别装置,能够获取任意时刻桥面车辆对桥面作用荷载的空间分布。
为达到以上目的,本发明采取的技术方案是:一种桥面车辆荷载识别装置,包括:
雷达跟踪定位系统,所述雷达跟踪定位系统包括至少一组雷达组,所述雷达组包括三个雷达,所述雷达用于设置桥梁上采集第一类车辆数据,所述第一类车辆数据至少包括车辆在桥面上的经度、纬度和速度;
动态称重系统,所述动态称重系统用于间隔设置于桥面以采集第二类车辆数据,所述第二类车辆数据至少包括车辆轴重、轴距和速度信息;
数据处理设备,所述数据处理设备获取第一类车辆数据和第二类车辆数据,所述数据处理设备根据时钟信息和所述第一类车辆数据计算得到与时间关联的车辆行驶轨迹,并结合所述第二类车辆数据和所述与时间关联的车辆行驶轨迹得到车辆对桥面作用荷载的空间分布。
在上述技术方案的基础上,所述雷达跟踪定位系统用于采集的数据包括车流量、平均车速、车头时距、车辆间距、车辆经度、车辆纬度和车辆速度。
在上述技术方案的基础上,所述动态称重系统用于采集的数据包括车辆速度、车辆总重、车辆轴重、车辆轴距和车辆车道分布。
在上述技术方案的基础上,所述雷达跟踪定位系统包括雷达采集模块,所述雷达采集模块与所述雷达组和数据处理设备相连。
本发明还提供一种设有上述装置的桥梁,其特征在于:
所述雷达组设于桥梁的桥塔或路灯上;
桥梁的桥面两端设有所述动态称重系统,所述动态称重系统安装在所述雷达跟踪定位系统探测区域内。
在上述技术方案的基础上,每组所述雷达组内三个所述雷达分别朝向桥面两端和桥面,且朝向桥面的所述雷达探测区域与另两所述雷达探测区域均部分重叠。
在上述技术方案的基础上,相邻两组所述雷达组的探测区域部分重叠。
在上述技术方案的基础上,所述桥面两端设有一机柜,所述机柜内设有所述数据处理设备。
本发明还提供一种使用上述装置的桥梁荷载分布识别方法,包括如下步骤:
S1、在待监测桥梁的桥塔或路灯上布置雷达跟踪定位系统,在待监测桥梁的桥面两端布置动态称重系统与数据处理设备;
S2、根据时钟信息和雷达组检测得到的车辆在桥面上的经度、纬度和速度计算得到和时间关联的车辆行驶轨迹;当该车辆通过动态称重系统后,记录车辆的轴重、轴距和速度信息,根据该车辆的车速与雷达跟踪定位系统检测数据进行匹配,将动态称重系统测得的轴重和轴距信息赋予相应车辆;;
S3、以一侧桥梁端部为坐标系原点,重复步骤S2,绘制在桥面上的每辆车的行驶轨迹,并获得每辆车的车重、轴重和轴距信息,截取任意时刻桥面上车辆位置坐标,获取任意时刻桥面车辆对桥面作用荷载的空间分布。
在上述技术方案的基础上,所述雷达跟踪定位系统和动态称重系统的数据采集同步。
与现有技术相比,本发明的优点在于:
(1)本发明的一种桥面车辆荷载识别装置,包括雷达跟踪定位系统、动态称重系统和数据处理设备,通过雷达跟踪定位系统和动态称重系统分别采集的第一类车辆数据和第二类车辆数据,并通过数据处理设备将雷达跟踪定位系统和动态称重系统的数据进行匹配处理,从而获取任意时刻桥面车辆对桥面作用荷载的空间分布。
附图说明
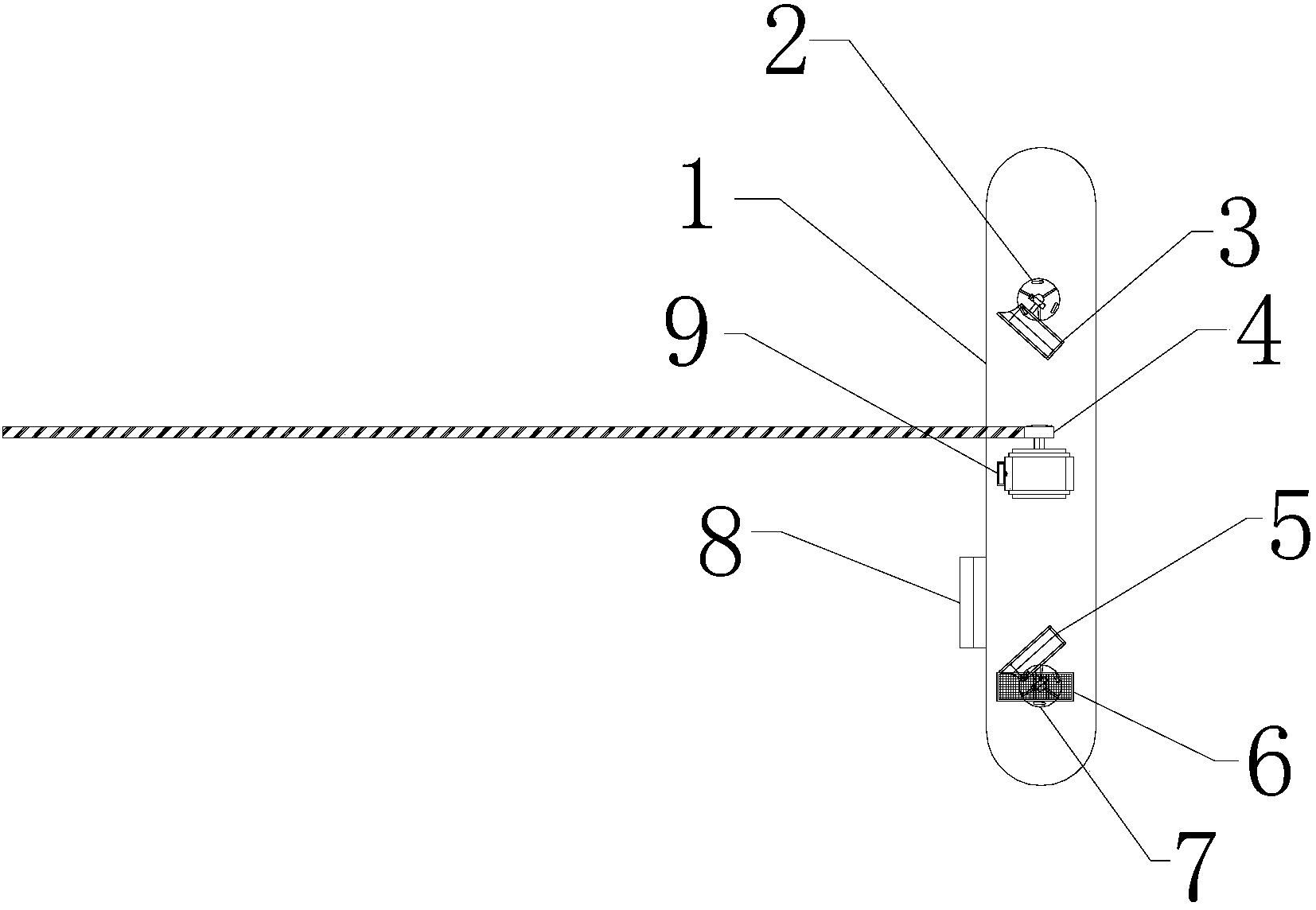
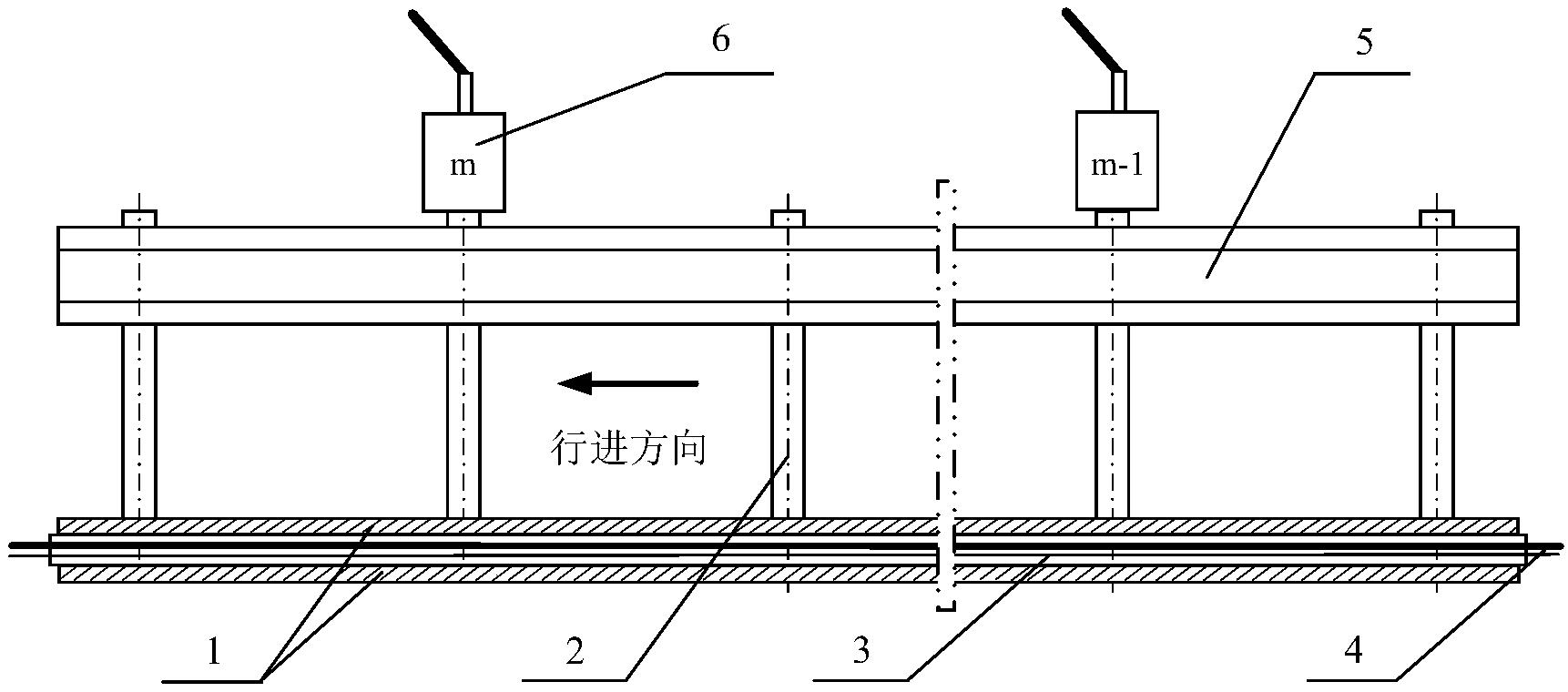
图1为本发明实施例中设有识别装置的桥梁的布置正视图;
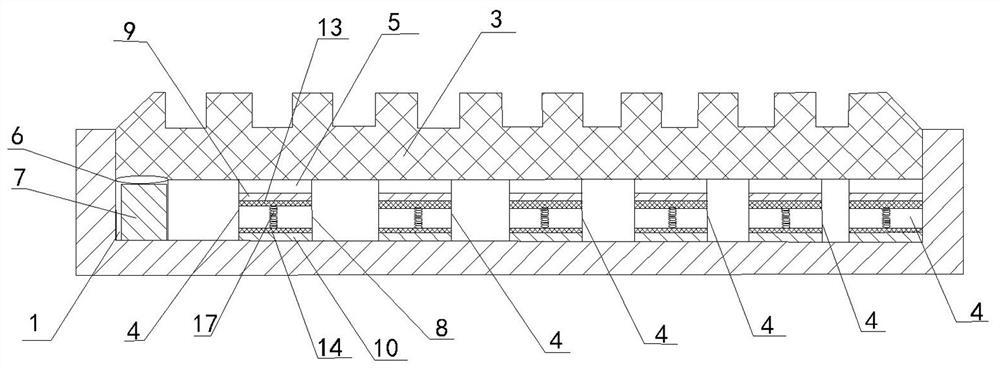
图2为本发明实施例中设有识别装置的桥梁的布置俯视图;
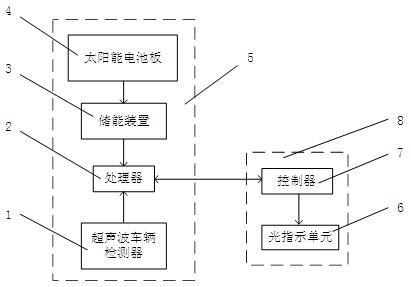
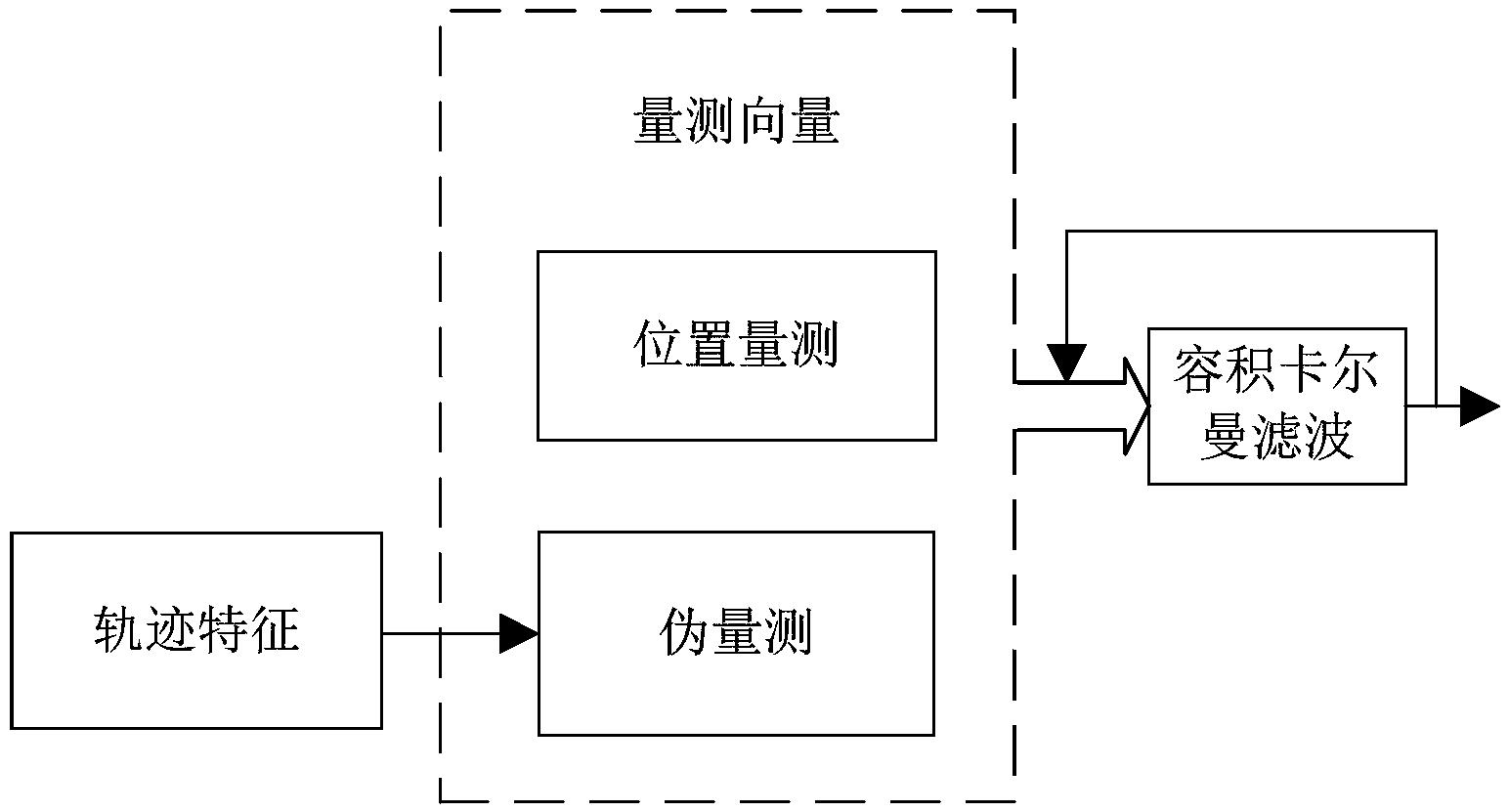
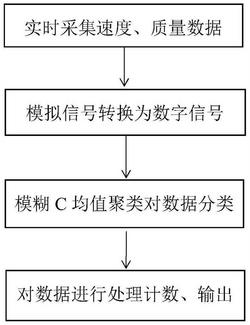
图3为本发明实施例中设有识别装置的桥梁荷载分布识别方法的步骤框图。
图中:1-雷达跟踪定位系统,11-雷达组,12-雷达,2-动态称重系统,3-数据处理设备。
具体实施方式
以下结合附图及实施例对本发明作进一步详细说明。
参见图1和图2所示,本发明实施例提供一种桥面车辆荷载识别装置,包括雷达跟踪定位系统1、动态称重系统2和数据处理设备3,雷达跟踪定位系统1包括至少一组雷达组11,每组雷达组11包括三个雷达12,雷达12用于设置桥梁上采集第一类车辆数据,第一类车辆数据至少包括车辆在桥面上的经度、纬度和速度,动态称重系统2用于间隔设置桥面以采集第二类车辆数据,第二类车辆数据至少包括车辆轴重、轴距和速度信息,数据处理设备3获取第一类车辆数据和第二类车辆数据,数据处理设备3根据时钟信息和所述第一类车辆数据计算得到与时间关联的车辆行驶轨迹,并结合所述第二类车辆数据和所述与时间关联的车辆行驶轨迹得到车辆对桥面作用荷载的空间分布,其中,优选的,雷达跟踪定位系统1用于获取的数据包括车流量、占有率、平均车速、车头时距、车辆间距、车辆位置坐标和车辆速度,其中,占有率为车流占据车道的时间的比率,动态称重系统2用于获取的数据包括车辆速度、车辆总重、车辆轴重、车辆轴距和车辆车道分布;通过雷达跟踪定位系统1记录车辆的时间、车道、车速和实时位置坐标,动态称重系统2记录车辆通过的时间、车道、车速、轴距、轴重和车重信息,并通过数据处理设备3将雷达跟踪定位系统1和动态称重系统2的检测数据进行匹配,从而获取任意时刻桥面车辆对桥面作用荷载的空间分布。
本实施例中所提到的时钟信息为雷达12自带的时钟。
其中,雷达跟踪定位系统1还包括一雷达采集模块,雷达采集模块与雷达组11和数据处理设备3相连,该雷达采集模块用于将雷达组11采集的数据进行整合处理并发送至数据处理设备3,雷达跟踪定位系统1和动态称重系统2的数据采集同步,能够保证雷达跟踪定位系统1和动态称重系统2在同一时刻获取的数据为车辆在同一点所产生的数据,进而保证该实时识别装置获取的任意时刻桥面车辆对桥面作用荷载的空间分布的准确性。
参见图1至图3所示,本发明实施例还提供一种设有上述识别装置的桥梁,其中,雷达组11设于桥梁的桥塔或路灯上,优选的,每组雷达组11内三个雷达12分别朝向桥面两端和桥面,且朝向桥面的雷达12探测区域与另两雷达12探测区域均部分重叠,相邻两组雷达组11的探测区域部分重叠;桥梁的桥面两端设有动态称重系统2,动态称重系统2的安装在所述雷达跟踪定位系统(1)探测区域内;桥梁的桥面两端设有数据处理设备3,数据处理设备3分别与雷达跟踪定位系统1和动态称重系统2相连。
其中,雷达12通过一固定支架固定于桥塔或路灯上,能够调节该雷达12安装于不同位置,确保该雷达12的检测区域符合要求;数据处理设备3设于一机柜内,且机柜设于桥面两端,能够对该数据处理设备3进行防护,避免数据处理设备3的暴露造成其结构受到损坏,从而提高该数据处理设备3的使用寿命。
参见图1至图3所示,本发明实施例还提供一种使用如上述装置的桥梁荷载分布识别方法,包括如下步骤:
S1、在待监测桥梁的桥塔或路灯上布置雷达跟踪定位系统1,在待监测桥梁的桥面两端布置动态称重系统2与数据处理设备3;
S2、根据时钟信息和雷达组11检测得到的车辆在桥面上的经度、纬度和速度计算得到和时间关联的车辆行驶轨迹;当该车辆通过动态称重系统2后,记录车辆的轴重、轴距和速度信息,根据该车辆的车速与雷达跟踪定位系统1检测数据进行匹配,将动态称重系统2测得的轴重和轴距信息赋予相应车辆;其中,将车辆的车速与雷达跟踪定位系统1检测数据进行匹配,其匹配依据为相同的车道,在较短时间内,动态称重系统2所测车辆与雷达跟踪定位系统1所测车辆车速最接近的车,为同一目标车辆,即实现动态称重系统2与雷达跟踪定位系统1车辆的匹配;
S3、以一侧桥梁端部为坐标系原点,重复步骤S2,绘制在桥面上的每辆车的行驶轨迹,并获得每辆车的车重、轴重和轴距信息,截取任意时刻桥面上车辆经度和纬度,获取任意时刻桥面车辆对桥面作用荷载的空间分布。
在布置雷达跟踪定位系统1和动态称重系统2时分别对其进行调试和标定,对雷达跟踪定位系统1进行调试,确保雷达跟踪定位系统1探测区域覆盖桥梁全长与动态称重系统2的安装范围,并覆盖桥梁上的全部车道;对动态称重系统2进行标定,保证车辆称重与测速精度。
步骤S2中通过雷达组11得到车辆行驶轨迹的步骤为:当一车辆进入雷达12检测范围时,记录车辆的经度、纬度和速度信息,当车辆通过该雷达12进入下一相邻雷达12检测范围内时,该两相邻雷达12通过各自获取的时间、车辆的经度和纬度进行关联匹配,实现车辆在相邻雷达12间的信息传递,进行多个雷达12数据计算得到和时间关联的车辆在桥面上的连续行驶轨迹,优选的,当一车辆进入雷达12检测范围时,记录车辆的时间、车道、车速、经度和纬度信息。
参见图3所示,本实施例中,步骤S2的多个雷达12数据计算得到和时间关联的车辆在桥面上的连续行驶轨迹,具体包括如下过程:
S2.1、数据处理设备3对第一类车辆数据进行数据时空对准处理,其中,雷达跟踪定位系统1内各雷达12独立工作,每一雷达12具有独立的数据参数和扫描周期,将所有雷达数据变换到一致的空间坐标系,实现空间对准,其具体的变换公式为:
式中,x和y是目标直角坐标,λ和 分别为目标车辆的经度和纬度,λ0、 和H分别是对应雷达12布置的经度、纬度和高度,R为地球半径;
S2.2、数据处理设备3将不同雷达12对同一目标车辆采集的第一类车辆数据统一到相同的时间坐标轴;其步骤包括:首先,通过硬件实现系统内各雷达12的系统对时操作,即进行时间同步操作,然后,通过函数逼近方法获得多个雷达12各自采集的第一类车辆数据的独立曲线方程,通过该方程可以推算得到雷达12在任意时刻采集的第一类车辆数据,即实现了多雷达的时间对准,其实现多雷达的时间对准的函数式为:
式中,t0、t1、t2为各雷达12对目标车辆进行采集第一类车辆数据的时间点,y0、y1、y2分别对应t0、t1、t2的空间位置,t为任意时间点,f1(t)为逼近函数且为对应t的空间位置,通过已知的y0、y1、y2及与之对应的t0、t1、t2获得连续拟合曲线,能够通过得到任意时间点的空间位置,进而得到雷达在该时间点所采集的第一类车辆数据,从而实现雷达的时间对准;
S2.3、通过计算相关系数来进行目标在多雷达间的关联,其相关系数的计算公式为:
其中,xi1、xi2、xi3、xi4分别是目标车辆在其中一雷达x轴、y轴上的坐标值和速度分量,xj1、xj2、xj3、xj4分别是目标车辆在另一雷达x轴、y轴上的坐标值和速度分量,通过计算得到的γij与预定为0.95的系数比较,当γij≥0.95时,该两雷达采集的为同一目标车辆,对该两雷达采集的第一类车辆数据得到的目标车辆坐标进行关联,即使目标车辆的行驶轨迹进行关联,其中,由于每一雷达得到的目标车辆坐标为连续的坐标,则可表示为该目标车辆在该雷达第一类车辆数据采集范围内的行驶轨迹;当γij<0.95时,该两雷达采集的为不同目标车辆,则不进行关联;
S2.4、完成时间对准、空间对准和行驶轨迹关联后,对多个独立雷达采集的第一类车辆数据进行融合计算,获得车辆在桥梁连续的行驶轨迹。
式中,xk、yk分别表示融合后的目标在X轴、Y轴上的坐标值,xi,k、yi,k分别表示第i部雷达k时刻上报目标在X轴、Y轴上的坐标轴,其中,对桥梁上的雷达依次进行编号为1、2、3…i;
S2.5、完成行驶轨迹融合计算后,即得到了车辆在桥面上的连续空间坐标,其表达式为:
CORm=[Xm,Ym]
式中,CORm为目标车辆m在桥面上的坐标,Xm,Ym分别为X轴、Y轴上的坐标值。
其中,实现时间对准的目的主要是由于雷达具有一定的扫描周期,假设其扫描周期为3s,不同雷达捕获目标的时间各不相同,在完成系统对时操作后,时间的起点为0,若其中一雷达第一次捕获到目标的时间是100ms,则第二次捕获到目标的时间是3100ms,第三次捕获到的时间是6100ms;另一雷达捕获第一次捕获到目标的时间是200ms,,则其第二次捕获到目标的时间是3200ms,第三次捕获到的时间是6200ms;通过以上数据可知,该雷达扫描数据为离散数据,无法统一到一条时间轴上,通过采用函数逼近的方法,能够在已知捕获到3次目标的时间点情况下,拟合出一条连续的曲线,进而得到任意时刻的数据,从而实现了所有雷达的时间对准。
图3中,所示的雷达1、2…N其所表达的意思为不同雷达,其中的动态称重系统的往和返,由于桥梁为双向通行,则将一个方向定义为往,另外一侧定义为返。
其中,雷达跟踪定位系统1和动态称重系统2的数据采集同步。
步骤S2中,优选的,当该车辆通过动态称重系统2后,记录车辆通过的时间、车道、车速、车重、轴重、轴距和速度信息,根据该车辆通过的时间、车速与雷达跟踪定位系统1检测数据进行匹配。
在完成对多雷达的数据计算后,将动态称重系统获取的目标车辆轴重、轴距和车速信息加载到目标车辆已知的桥面坐标上,即可准确的得到桥面车辆荷载作用,其中,车速信息可以用以该桥面的车流量统计。
本实施例的桥面车辆荷载识别装置及其识别方法同样适用于梁桥、拱桥和悬索桥的车辆荷载全方位实时精确识别,区别在于雷达天线设置数量及布置方式,在此不再赘述。
本发明不局限于上述实施方式,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围之内。本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
桥面车辆荷载识别装置、桥梁及桥梁荷载分布识别方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0