







专利摘要
一种基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法,属于航空发动机控制技术领域。首先初步选取多组涡扇发动机的控制量和被控量,然后使用相关性分析法进一步确定相关性较大的控制量与被控量;采用跟踪微分器将每组控制指令规划为跟踪轨迹,再与扩张状态观测器估计的当前状态一起作为非线性比例‑微分控制器的输入计算控制量,同时使用恰当结构抵消扩张状态观测器观测包括多变量各回路间的耦合在内的总扰动,以达到良好的控制效果。本发明不仅达到涡扇发动机要求多输入多输出同时按照预定轨迹运行达到控制要求的目标,相对于传统控制控制器设计方法难度更小,需要调节的参数数量少且物理意义十分明确,系统的鲁棒性也得到了极大的提升。
权利要求
1.一种基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法,其特征在于,步骤如下:
S1.基于多变量控制目标,选择两组或者多组被控变量,并确定每个被控变量的控制参数要求,然后结合机理分析和相关性分析的方法确定每个被控变量对应的控制量;
确定被控变量和控制量的步骤如下:
S1.1分析涡扇发动机控制要求,根据涡扇发动机的机理初步确定控制量U=[u
S1.2选取第i组的控制量和被控变量进行分析,保持涡扇发动机的其他输入量[u
式中:满足
S1.3运行涡扇发动机模型,获取输出数据
S1.4对获得的涡扇发动机的输入
S1.5运用相关性分析的方法计算相关性系数Re
S1.6根据所得的相关系数Re
S2.根据自抗扰的基本原理,建立跟踪微分器模块、线性扩张状态观测模块和非线性PD模块三个模块,构建稳态过渡态控制器,并保留跟踪微分器的时间常数r
建立稳态过渡态控制器的步骤如下:
S2.1建立二阶离散系统最速控制综合函数f
d=r
d
fx=p+hq
式中,r
S2.2根据建立的f
g
g
S2.3建立线性扩张状态观测器,使用涡扇发动机输入u
Z=[z
式中,b
S2.4建立非线性函数fal(e,α,δ),其形式如下所示:
S2.5依据建立的非线性函数,建立非线性PD反馈控制器如下所示:
u
S2.6依据自抗扰理论中各模块的结构,组装建立涡扇发动机稳态过渡态控制器;
S3.选定一组控制量和被控变量为调参控制回路,保持其余回路的控制量不变或者按照期望轨迹运行,调节稳态过渡态控制器参数至基本达到控制要求;
调节稳态过渡态控制器第i组控制参数步骤如下:
S3.1根据涡扇发动机的数据
S3.2使用涡扇发动机的数据
S3.3输入参考指令v
S3.4使用
S3.5计算稳态过渡态控制器的输出为
S3.6将控制器与涡扇发动机构成闭环,然后综合调节K
S4.建立上限保护函数fun
建立涡扇发动机状态参数限制保护控制器的步骤如下:
S4.1根据涡扇发动机控制目标确定限制保护参数的限制值x
S4.2建立上限保护函数fun
式中,x
S4.3基于限制保护函数建立离散状态下死区环节,其表达式如下所示:
式中,fun
S4.4将限制保护控制器的输出以负反馈的形式接入控制回路,调整限制保护控制器能输出的最大值u
S5.进行多变量控制器测试,微调各参数保证涡扇发动机的整体效果,以增强涡扇发动机的多变量控制系统对外部环境变化的适应能力。
说明书
技术领域
本发明涉及一种基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法,具体的说,是基于自抗扰理论,建立航空发动机的多变量控制框架,优化涡扇发动机在慢车及以上的转速的运行过程中的控制效果,属于航空发动机控制技术领域。
背景技术
本发明依托的背景为某型的双转子涡扇发动机的控制技术。目前,我国航空发动机的相关技术多从材料和结构的角度对航空发动机的效能进行提高,从控制领域的改进和优化较少。从材料和结构的角度的改进固然能够提高涡扇发动机的效率,但从控制领域对其进行优化能够更好地发挥当前航空发动机的潜能,延长涡扇发动机的使用寿命。航空发动机设计初期,其控制器的实现形式为机械装置和液压结构,虽然具有很好的稳定性,但只能实现简单的控制规律,无法应用复杂的控制算法。随着数字电子技术的提高,全权限数字电子控制器(FADEC)逐步应用于涡扇发动机控制系统的具体实现,并体现出了易于修改控制策略、能够实现复杂算法等诸多优势。
涡扇发动机的控制按照其处于的不同阶段可以分为启动停车控制、稳态控制、加减速控制和加力控制等多个阶段。本发明不涉及启动停车控制部分。
稳态控制是指涡扇发动机在慢车转速到最大转速的过程中,维持发动机转速在其中任意一点不发生变化的控制过程。传统涡扇发动机的稳态控制多采用的是PID控制算法,需要获得涡扇发动机在每个稳态点的小偏离的线性模型,针对所有线性模型调整PID参数以获得涡扇发动机燃油的增量,与稳态燃油共同作用作为涡扇发动机的实际燃油输入量。这种方法原理简单,但涉及线性模型辨识、PID参数调整、增益调度等多个方面,设计流程相当复杂。
加减速控制是指燃气轮机在慢车和额定转速状态之间快速变化的控制过程,该过程涡扇发动机的气动热力学特性变化巨大,使用上述的稳态控制器无法胜任加减速过程的工作,在实际过程中通常使用加减速计划的方式限制涡扇发动机运行在合理的范围之内。一旦涡扇发动机处于加减速计划之中,涡扇发动机的控制器就将控制权交给加减速计划,控制效果也由预先设定好的加减速计划确定。
而且随着对机动性和工作效率的要求不断提高,涡扇发动机的多变量控制也逐渐成为突破的方向。尤其是涡扇发动机加力燃烧室的加入使得不能只通过调节主燃烧室的燃油的方式维持涡扇发动机的稳定状态。目前,加力部分启动后涡扇发动机的相关动作也是基于计划的,控制效果依赖于前期计划的设定。涡扇发动机的多变量控制可以为航空发动机控制提供新的优化空间,有利于提高涡扇发动机的综合性能,充分发挥发动机在运行过程中的潜能。
综上,当前的涡扇发动机控制技术存在许多不足。首先,涡扇发动机控制器的设计主要集中在稳态控制器的设计,在加减速和加力时期多以不同的计划来限制涡扇发动机的工作边界,控制器的设计只能保证稳态性能而无法改变其过渡态性能;其次,涡扇发动机的运行过程中存在稳态控制器和加减速计划控制权交换的问题,导致控制器在稳态和加减速的控制策略不统一,既需要设计稳态控制器,又要设计合理的过渡态计划、加力过程的执行机构动作计划等;而且,当前涡扇发动机控制策略不适用于多变控制的要求,需要对当前控制系统的结构进行大量的修改以适应解耦等新需求;最后,现有的涡扇发动机控制系统需要多次调整多组参数和大量的计划曲线,控制器设计流程冗杂、低效。
所以,为了克服当前航空发动机控制系统设计的不足,本发明设计了基于自抗扰理论的涡扇发动机多变量控制系统。本发明的多变量控制系统不仅将涡扇发动机的稳态和过渡态作为同一种情况统一处理,避免了不同方法的切换引入的不确定性。而且本发明使用总扰动估计的方式对涡扇发动机的内部状态变化和外部干扰影响统一观测,并实施补偿抵消,比传统方法具有更好的鲁棒性。本发明也适用于具有相同功能结构或者相似工作特性线的燃气轮机和其他装置。
发明内容
针对现有方法设计涡扇发动机控制系统设计过程中流程复杂、依赖计划难以实现多变量控制等多个问题,本发明提供了一种基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法。
本发明的技术方案:
一种基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法,步骤如下:
S1.基于多变量控制目标,选择两组或者多组被控变量,并确定每个被控变量的控制参数要求,然后结合机理分析和相关性分析的方法确定每个被控变量对应的控制量;
确定被控变量和控制量的步骤如下:
S1.1分析涡扇发动机控制要求,根据涡扇发动机的机理初步确定控制量U=[u1,…,ui,…,un]
S1.2选取第i组的控制量和被控变量进行分析,保持涡扇发动机的其他输入量[u1,…,ui-1,ui+1,…un]为合理常值,将第i组控制量的序列设置为
式中:满足 并且 在控制量ui正常运行的范围之内,m是指本组数据采样点个数;
S1.3运行涡扇发动机模型,获取输出数据
S1.4对获得的涡扇发动机的输入 和输出 进行归一化,归一化方法如下:
S1.5运用相关性分析的方法计算相关性系数Rei,具体公式如下:
S1.6根据所得的相关系数Rei确定控制量ui是否用于被控变量yi的控制,若相关系数符合要求,则该组参数选择正确,否则,控制量与被控变量相关度不大,则需重新更换控制量,直至相关系数满足要求;
S2.根据自抗扰的基本原理,建立跟踪微分器模块、线性扩张状态观测模块和非线性PD模块三个模块,构建稳态过渡态控制器,并保留跟踪微分器的时间常数rt、线性扩张状态观测器的wo、非线性PD的Kp和Kd作为待调参数;
建立稳态过渡态控制器的步骤如下:
S2.1建立二阶离散系统最速控制综合函数fhan(p,q,rt,h),其表达式如下:
d=rt×h
d0=h×d
fx=p+hq
式中,rt为待调参数,用以调节跟踪微分器输出变量的过渡时间的长度,rt越大,过渡时间越短;h为仿真步长;sign(fx)为符号函数, d,d0,fx,a0,a是为了便于计算引入的内部变量,fhan为函数fhan(p,q,rt,h)的输出;
S2.2根据建立的fhan(p,q,rt,h)函数,构建跟踪微分器(Tracking Differential,TD)模块,跟踪微分器的输入是第i回路的控制指令vi,输出分别为跟踪轨迹gi和轨迹的导数gi′,其离散形式的更新表达式如下:
gi=gi+h×gi′
gi′=gi′+h×fhan(gi-vi,gi′,rt,i,h)
S2.3建立线性扩张状态观测器,使用涡扇发动机输入ui和输出yi作为扩张状态观测器的输入,观测当前输出量的状态 和总扰动 其表达形式如下所示:
Z=[z1,i,z2,i,z3,i]
式中,b0,i,wo,i分别为扩张状态观测器参数,b0,i为模型表征参数,与实际模型相关,wo,i是扩张状态观测器的带宽参数;ui,yi为扩张状态观测器的输入,Z为扩张状态观测器的状态变量, 是扩张状态观测器的输出,三个输出量分别是涡扇发动机输出yi的估计值 yi的变化趋势 和涡扇发动机在该回路的总扰动
S2.4建立非线性函数fal(e,α,δ),其形式如下所示:
S2.5依据建立的非线性函数,建立非线性PD反馈控制器如下所示:
uPD,i=Kp,ifal(ei,αp,i,δp,i)+Kd,ifal(ei′,αd,i,δd,i)
S2.6依据自抗扰理论中各模块的结构,组装建立涡扇发动机稳态过渡态控制器;
S3.选定一组控制量和被控变量为调参控制回路,保持其余回路的控制量不变或者按照期望轨迹运行,调节稳态过渡态控制器参数至基本达到控制要求;
调节稳态过渡态控制器第i组控制参数步骤如下:
S3.1根据涡扇发动机的数据 和 初步选择扩张状态观测器参数以满足下式条件:
S3.2使用涡扇发动机的数据 和 作为扩张状态观测器的输入,调整扩张状态观测器参数wo,i至扩张状态观测器输出 正确跟踪
S3.3输入参考指令vi,调节参数rt,i以获得期望的过渡轨迹gi,当轨迹过渡时间过长时,增大参数rt,i,反之则减小rt,i;
S3.4使用 和 作为非线性PD控制器的输入,并调节Kp,i,Kd,i至合理值,其输出为uPD,i;
S3.5计算稳态过渡态控制器的输出为
S3.6将控制器与涡扇发动机构成闭环,然后综合调节Kp,i,Kd,i,wo,i,b0,i以保证被控变量yi能够较好的跟踪给定轨迹;
S4.建立上限保护函数funl(xi,xi,l,xi,dl,uj,l),以该函数为基础设计涡扇发动机状态参数限制保护控制器,对控制回路的输出进行限制,保证系统被控量达到控制要求的同时其状态参数不超限;
建立涡扇发动机状态参数限制保护控制器的步骤如下:
S4.1根据涡扇发动机控制目标确定限制保护参数的限制值xi,l以及限制保护控制器作用范围xi,dl;
S4.2建立上限保护函数funl(xi,xi,l,xi,dl,uj,l),其公式为
式中,xi是需要限制保护的涡扇发动机参数,xi,l是参数xi允许的最大值,xi,dl是该限制保护工作控制器的工作范围的大小,即该控制器在xi>xi,l-xi,dl时开始起作用,uj,l表示的是限制保护控制器能够输出的最大值,这里j是表示限制保护参数所对应的控制器输出量不与涡扇发动机控制量排序相关;
S4.3基于限制保护函数建立离散状态下死区环节,其表达式如下所示:
式中,funout(k)表示的是限制保护控制器在第k时刻的输出,xi,k,xi,k-1,xi,k-2分别为第k,k-1,k-2时刻涡扇发动机参数的数值,Δi,Δi′分别是位置死区和速度死区的大小;
S4.4将限制保护控制器的输出以负反馈的形式接入控制回路,调整限制保护控制器能输出的最大值uj,l,保证限制保护控制器能够满足超限保护的作用。
S5.进行多变量控制器测试,微调各参数保证涡扇发动机的整体效果,以增强涡扇发动机的多变量控制系统对外部环境变化的适应能力。
本发明的有益效果为:本发明的设计的涡扇发动机稳态过渡态多变量控制系统,不仅能够达到涡扇发动机要求多输入多输出同时按照预定轨迹运行达到控制要求的目标,而且,相对于传统控制控制器设计方法难度更小,需要调节的参数数量少且物理意义十分明确,系统的鲁棒性也得到了极大的提升。因此,本发明为涡扇发动机多变量控制提供了一种新的更为有效的控制思路,在满足涡扇发动机的多变量控制要求、稳态控制要求、伺服控制要求和抗扰性能要求的基础上,建立实时限制保护控制器,保证涡扇发动机运行所有时刻均运行在安全包线之内,防止涡扇发动机发生危险。同时,本方法充分利用自抗扰理论对于未知扰动的估计能力,将涡扇发动机多变量控制中各回路间的耦合作为总扰动进行估计,无需对耦合部分做特殊处理。本方法既可以完全替代以PID为主的传统控制策略,又可以与以min-max为核心的传统限制保护策略配合使用,实现方式灵活多样,逻辑结构较为简单。同时,本方法也适用于具有相似结构的燃气轮机以及相似工作原理的内燃机的控制系统的设计,应用范围很广。
附图说明
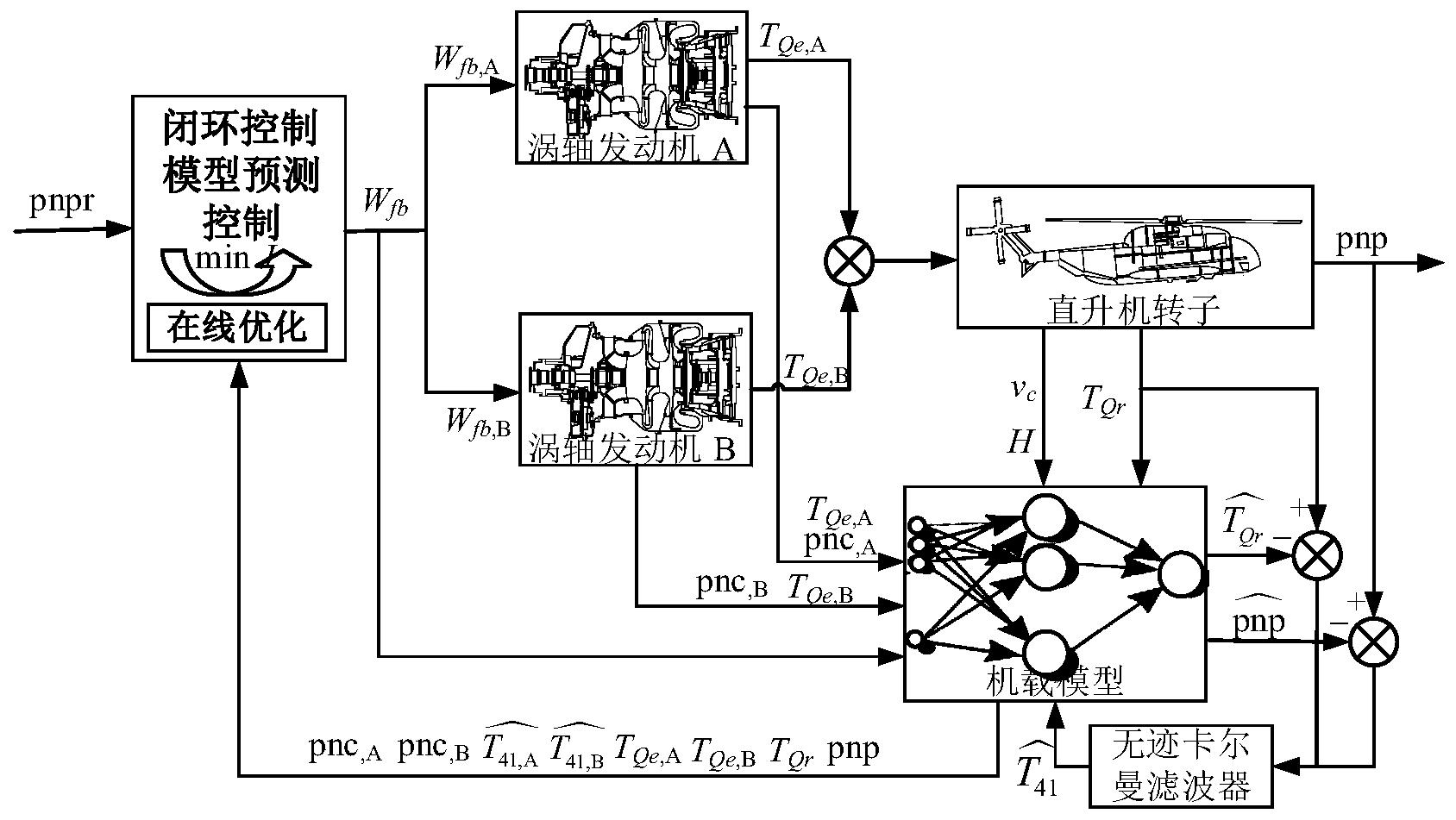
图1为基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法的控制结构图;
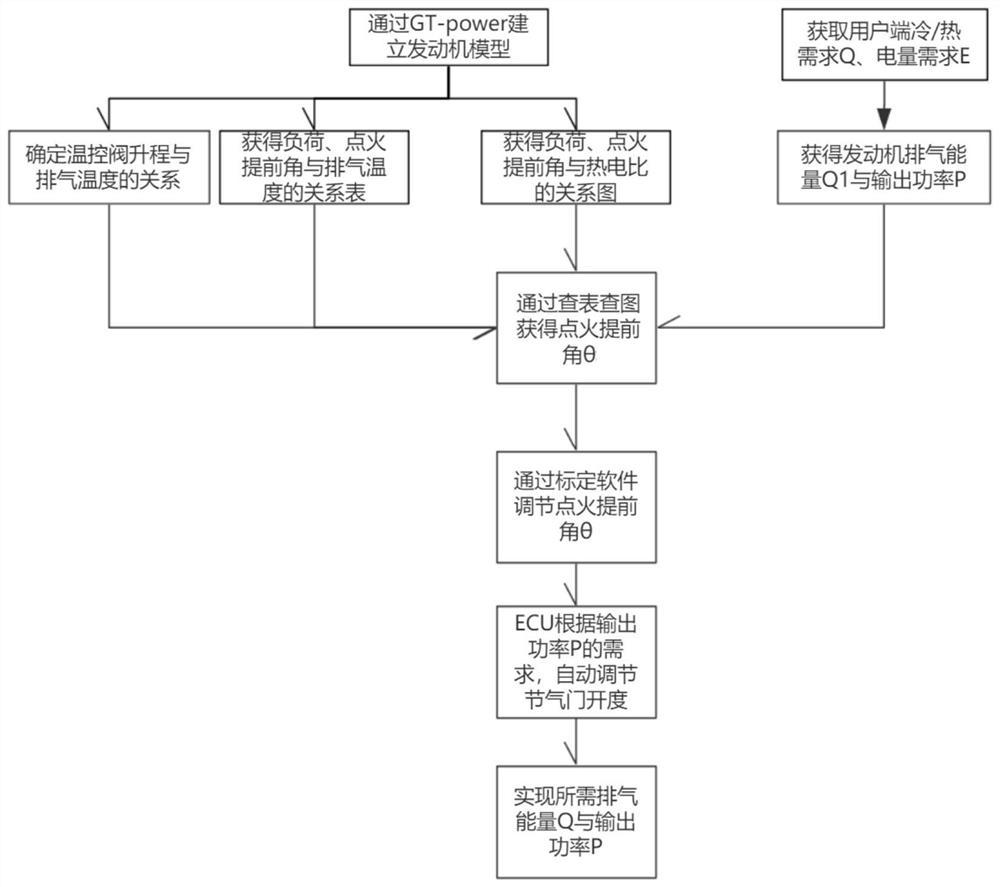
图2为基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法的设计流程图;
图3为确定被控变量和控制量的流程图;
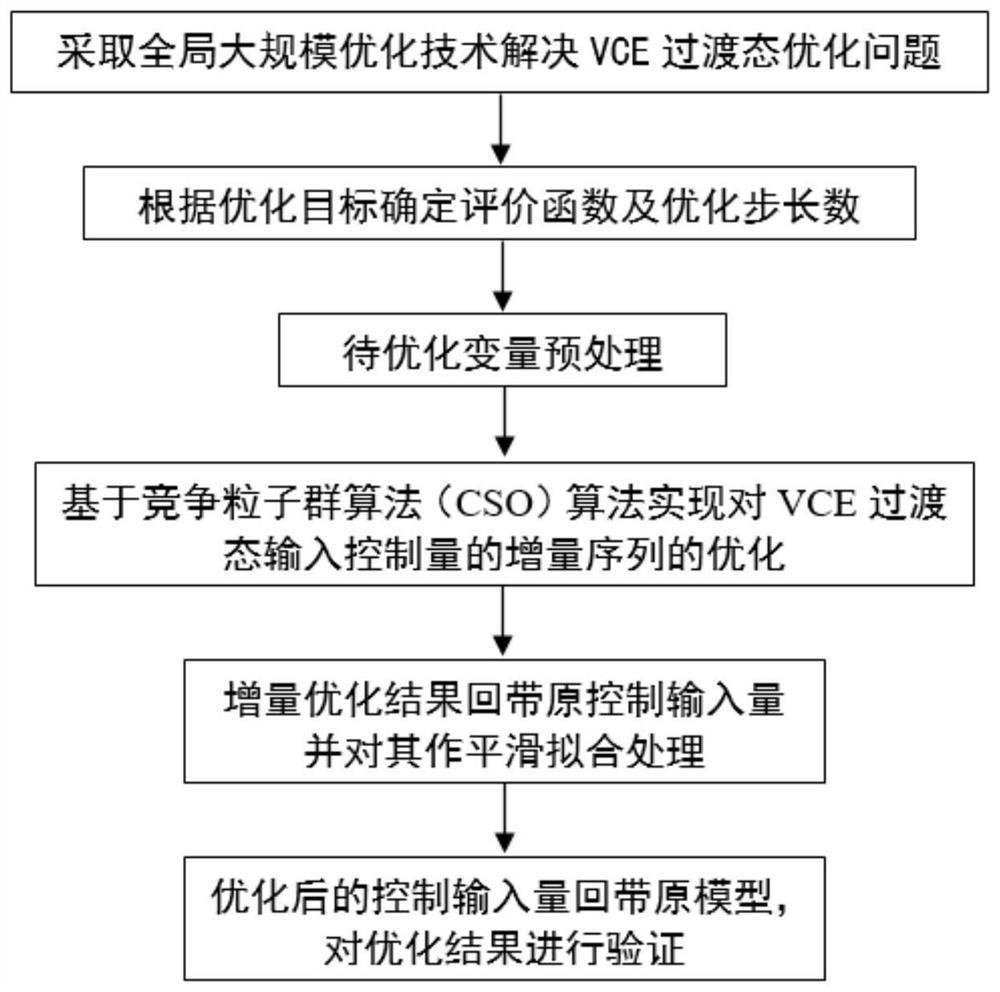
图4为建立稳态过渡态控制器流程图;
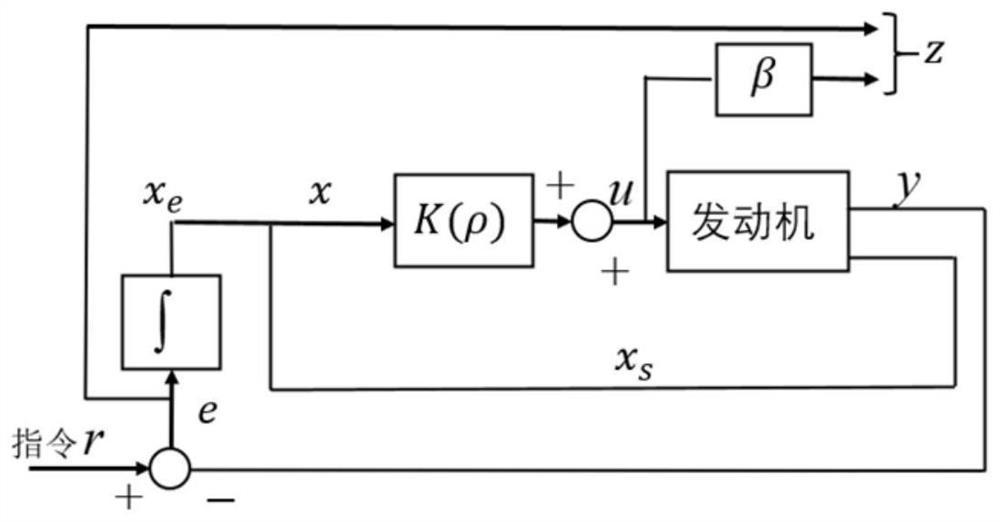
图5为自抗扰控制器结构图;
图6为稳态过渡态控制器参数调节流程图;
图7为限制保护控制器设计流程图;
图8为某型涡扇发动机在某一工况下转速控制效果图;
图9为某型涡扇发动机在某一工况下落压比控制效果图;
图10为某型涡扇发动机在某一工况下转速抗扰效果图;
图11为某型涡扇发动机在某一工况下落压比抗扰效果图;
图12为某型涡扇发动机在某一工况下温度控制效果图;
具体实施方式
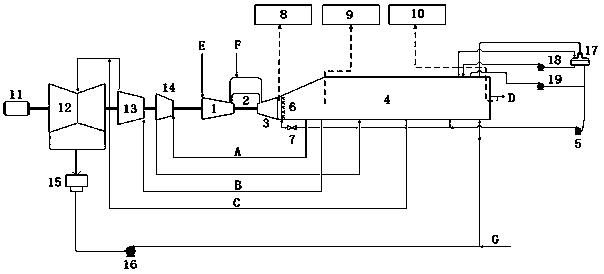
下面结合附图对本发明作进一步说明,本发明的依托背景为某型双转子涡扇发动机的非线性模型,控制结构图如图1所示。
如图2所示,一种基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法,主要包括如下步骤:
S1.基于多变量控制目标,选择两组或者多组被控变量,并确定每个被控变量的控制参数要求,然后结合机理分析和相关性分析的方法确定每个被控变量对应的控制量;
S2.根据自抗扰的基本原理,建立跟踪微分器模块、线性扩张状态观测模块和非线性PD模块三个模块,构建稳态过渡态控制器,并保留跟踪微分器的时间常数rt、线性扩张状态观测器的wo、非线性PD的Kp和Kd作为待调参数;
S3.选定一组控制量和被控量为调参控制回路,保持其余回路的控制量不变或者按照期望轨迹运行,调节稳态过渡态控制器参数至基本达到控制要求;
S4.建立上限保护函数funl(xi,xi,l,xi,dl,uj,l),以该函数为基础设计涡扇发动机状态参数限制保护控制器,对控制回路的输出进行限制,保证系统被控量达到控制要求的同时其状态参数不超限;
S5.进行多变量控制器测试,微调各参数保证涡扇发动机的整体效果,以增强涡扇发动机的多变量控制系统对外部环境变化的适应能力。
如图3,确定被控变量和控制量的步骤如下:
S1.分析涡扇发动机控制要求,根据涡扇发动机的机理选取涡扇发动机主燃烧室燃油F和尾喷管面积A8为控制量,选取高压转子转速N2和落压比πT为被控量即U=[F,A8]
S2.选取第1组的控制变量和被控变量为例进行分析,保持涡扇发动机的输入量A8=0.2602m
式中满足单调递增条件且在合理范围之内;
S3.运行涡扇发动机模型,获取输出数据
S4.对获得的涡扇发动机的输入 和输出 进行归一化,归一化方法如下:
S5.运用相关性分析的方法计算相关性系数Re1,具体公式如下:
S6.通过上述计算可得,Re1=0.9916>0.5,说明两者相关性较高,可以作为一组控制变量;同理可得A8和πT的相关性系数Re2=0.9979>0.5,那么他们也可以作为第二组控制变量。控制量与被控量相关度系数小于0.5,则需重新更换控制量,直至相关系数满足要求。
如图4所示,建立稳态过渡态控制器的步骤如下:
S1.建立二阶离散系统最速控制综合函数fhan(p,q,rt,h),其表达式如下:
d=rt×h
d0=h×d
fx=p+hq
式中,rt为待调参数,用以调节跟踪微分器输出变量的过渡时间的长度,rt越大,过渡时间越短;h为仿真步长;sign(fx)为符号函数, d,d0,fx,a0,a是为了便于计算引入的内部变量,fhan为函数fhan(p,q,rt,h)的输出。
S2.根据建立的fhan(p,q,rt,h)函数,构建跟踪微分器(Tracking Differential,TD)模块,跟踪微分器的输入为控制系统的输入指令vi,输出分别为跟踪轨迹gi和轨迹的导数gi′,其离散形式的更新表达式如下:
gi=gi+h×gi′
gi′=gi′+h×fhan(gi-vi,gi′,rt,i,h)
S3.建立线性扩张状态观测器,用于根据当前的输入ui和输出yi观测当前输出量的状态和总扰动。其表达形式如下所示
Z=[z1,i,z2,i,z3,i]
式中,b0,i,wo,i分别为待调参数,b0,i为模型表征参数,与实际模型相关,wo,i是扩张状态观测器的带宽参数;ui,yi为扩张状态观测器的输出,Z为扩张状态观测器的状态变量, 扩张状态观测器的估计输出,三个输出量分别是涡扇发动机输出yi的估计值 yi的变化趋势 和涡扇发动机在该回路的总扰动
S4.建立非线性函数fal(e,α,δ),其形式如下所示:
S5.依据建立的非线性函数,建立非线性PD反馈控制器如下所示
uPD,i=Kp,ifal(ei,αp,i,δp,i)+Kd,ifal(ei′,αd,i,δd,i)
S6.依据图5中各模块的结构,组建涡扇发动机稳态过渡态控制器。
如图6所示,调节稳态过渡态控制器第1组控制参数步骤如下,第2组控制参数的调整也与此相同:
S1.根据涡扇发动机的数据 和 初步选择扩张状态观测器中的模型表征参数b1,0=200,满足下式条件
S2.初步选定扩张状态观测器的wo,1=1,使用涡扇发动机的数据 和 作为扩张状态观测器的输入,观测其输出即N2的估计值 是否能够正确跟踪 若跟踪效果较差,增大wo,1的值,观测跟踪效果;若wo,1较大(如wo,1>100)效果仍然不好,适当减小b0,1,重新调整观测跟踪效果直至观测效果良好;
S3.输入参考指令v1,调节参数rt,1以获得期望的过渡轨迹gi,当轨迹过渡时间过长时,增大参数rt,1,反之则减小rt,1;
S4.使用 和 作为非线性PD控制器的输入,并调节Kp,1,Kd,1至合理值,其输出为uPD,1;
S5.计算稳态过渡态控制器的输出为
S6.综合调节Kp,1,Kd,1,wo,1,b0,1以保证被控量N2能够较好的跟踪给定轨迹g1。经过多次调节,最终得到效果较好的参数组合为 同理可得A8,πT控制回路的参数为Kp,2=50,Kd,2=10,b0,2=3000,wo,2=30,rt,2=1时效果较好。
如图7所示,建立涡扇发动机状态参数限制保护控制器的步骤如下:
S1.根据涡扇发动机控制目标确定温度限制为T4,1C,l=1700K以及限制保护控制器开始作用时的参数值T4,1C,dl=30K;
S2.依据公式建立上限保护函数funl(T4,1C,T4,1C,l,T4,1C,dl,Fl),即
S3.基于限制保护函数建立离散状态下死区环节,其表达式如下所示
式中,死区的两个参数分别选取为Δ1=2,Δ1′=5;
S4.将限制保护控制器的输出以负反馈的形式接入控制回路,选取限制保护控制器能输出的最大值Fl=300kg/h,保证限制保护控制器能够满足超限保护的作用。
设计完成后基于自抗扰理论的涡扇发动机稳态过渡态多变量控制器的控制效果如图8和图9所示,转速控制过程中超调量为0,调节时间为9.93秒,稳态误差为0.05r/min,在整个过程中的占比小于0.01%;落压比控制过程中,超调量为0.55%,调节时间为9.83秒,峰值时间为12.13秒,稳态误差为0.0074,占整个过程的0.15%。
对于该方法的抗扰性能,在不改变控制器参数的情况下运行涡扇发动机至额定工况,通过施加加力燃油,观测该扰动对控制效果的影响。图10和图11是在稳定运行后第20秒添加幅值为2000kg/h的加力燃油并在第30秒将该扰动撤销的图像。由图可以看出,加力过程中转速超调量为0.14%,调节时间为6.83秒,落压比超调量为2.17%,调节时间为11.55秒;撤销加力过程中,转速超调量0.13%,调节时间为6.88秒,落压比超调量为2.45%,调节时间为9.88秒。
对于限制保护控制器性能的测试,由于正常情况下不会触发该控制器,需要降低限制保护参数的限制值以观察其作用。这里将温度限制保护修改为T4,1C,l=1600K,控制效果如图12所示。由图12可以看出,在温度限制保护控制器作用后其输出温度低于1600K。
综上,使用基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法能够达到涡扇发动机的控制要求,且能够保证涡扇发动机运行在安全范围内。
一种基于自抗扰理论的涡扇发动机稳态过渡态多变量控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0