





专利摘要
本发明公开了一种用于二维转动设备的锁定装置,包括锁定装置底座、方位转动顶紧装置、锁紧机械臂、电磁制动器、锁紧轴系以及解锁扭簧。锁定装置安装在二维转动设备基座的端面,通过锁紧机械臂顶端实现对二维转动设备俯仰转动锁定,通过顶紧装置实现对方位转动的锁定。由失电式电磁制动器断电制动功能实现锁紧轴系的制动,并使锁定装置保持对二维转动设备的锁定。当需要锁定装置解除对二维转动设备制动时,对电磁制动器通电,制动解除。在解锁扭簧的扭力作用下锁紧机械臂绕锁紧轴系转动,并旋离二维转动设备的工作范围。再次对电磁制动器断电,制动力矩使锁紧装置保持解锁状态。
权利要求
1.一种二维转动设备的锁定装置,它由锁定装置底座(1)、方位转动顶紧装置(2)、锁紧机械臂(3)、电磁制动器(4)、锁紧轴系(5)以及解锁扭簧(6)组成,其特征在于:所述的锁定装置安装于二维转动设备(7)基座端面处;所述的方位转动顶紧装置(2)固定在锁紧机械臂(3)安装孔内,锁紧机械臂(3)固定在锁紧轴系(5)安装平台的端面,锁紧机械臂(3)顶端挡板插入两个俯仰转动限位挡块(8)之间;所述的解锁扭簧(6)固定在锁紧轴系(5)一侧;所述的电磁制动器(4)固定在锁紧轴系(5)的另一侧;所述的锁定装置在锁定状态时,锁紧机械臂保持对二维转动设备(7)的锁定,其中顶紧装置(2)实现对方位转动的锁定;锁紧机械臂(3)的顶端实现对俯仰转动的锁定;电磁制动器(4)断电时,锁紧轴系(5)对二维转动设备进行锁定;对电磁制动器(4)通电锁紧轴系(5)则解除对二维转动设备的锁定,此时,锁紧机械臂(3)连同方位转动顶紧装置(2),在解锁扭簧(6)扭转力矩作用下,旋离二维转动设备(7)的工作范围。
说明书
技术领域:
本发明涉及一种二维光电转台,特别涉及一种二维光电转台的锁定装置,它用于二维光电转台转动锁定及锁定解除。
背景技术:
星载二维光电转台可以通过带动光电负载的两维大范围转动,实现对地面目标的跟踪和捕获并进行通讯作业。为了避免二维转台在上电工作前的大范围转动,以保护转台轴系和光电负载,对二维光电转台进行锁定;当二维转台上电工作前,需要解除对二维光电转台的锁定。
由于星载二维光电转台的不可维修性,对其进行锁定的装置需要具有非常高的可靠性。不但对转台的锁定具有高的可靠性,工作前的可靠解锁更是尤为重要。因为锁定机构的解锁失效,直接导致整个星载二维光电转台无法工作。
由于某种原因,星载二维光电转台锁定阶段,,没有电力供应,需要在断电状态下实现对二维光电转台锁定。工作前,通电对其进行锁定解除。
二维光电转台的终端负载为光学和电子学设备,转台轴系也有很高的回转精度要求。二维光电转台及其锁定装置,在卫星平台发射阶段需要经历剧烈地空间力学环境。所以,需要对二维光电转台在工作前的振动环境中进行锁定,避免转台大范围转动。并且通过锁定装置减小振动环境对二维光电转台极其终端负载的破坏力,起到对光电载荷的保护作用。而且,不应引入刚性约束给转台轴系及负载带来不必要地附加作用力。
星上载荷对二维光电转台及其锁定装置有苛刻地重量限制,所以希望锁定 装置具有极轻的重量。
发明内容:
本发明目的是提供一种星载二维光电转台的锁定装置。以解决在没有电力供应的情况下,在一个装置上同时实现设备两维转动的锁定。
本发明利用电磁制动器保持装置处于对二维转动设备的锁定位置,通过锁紧机械臂顶端挡板对俯仰转动进行锁定,通过安装在锁紧机械臂中部的顶紧装置对方位转动进行锁定,从而满足二维转动设备工作前的锁定要求。且电磁制动器制动解除后,可通过解锁扭簧实现二维转动设备的制动解除。电磁制动器再次启动制动功能,保持装置处于对二维转动设备的锁定解除位置。同时该装置具有对二维转动设备在振动环境中的振动抑制功能。本发明特别适用于星载二维光电转台在卫星平台发射阶段的振动环境中对其两维转动进行有效锁定的同时起到对其振动的抑制作用,并在入轨工作前实现可靠性极高地锁定解除。
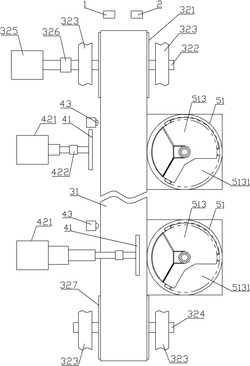
具体装置如附图1~4所示。
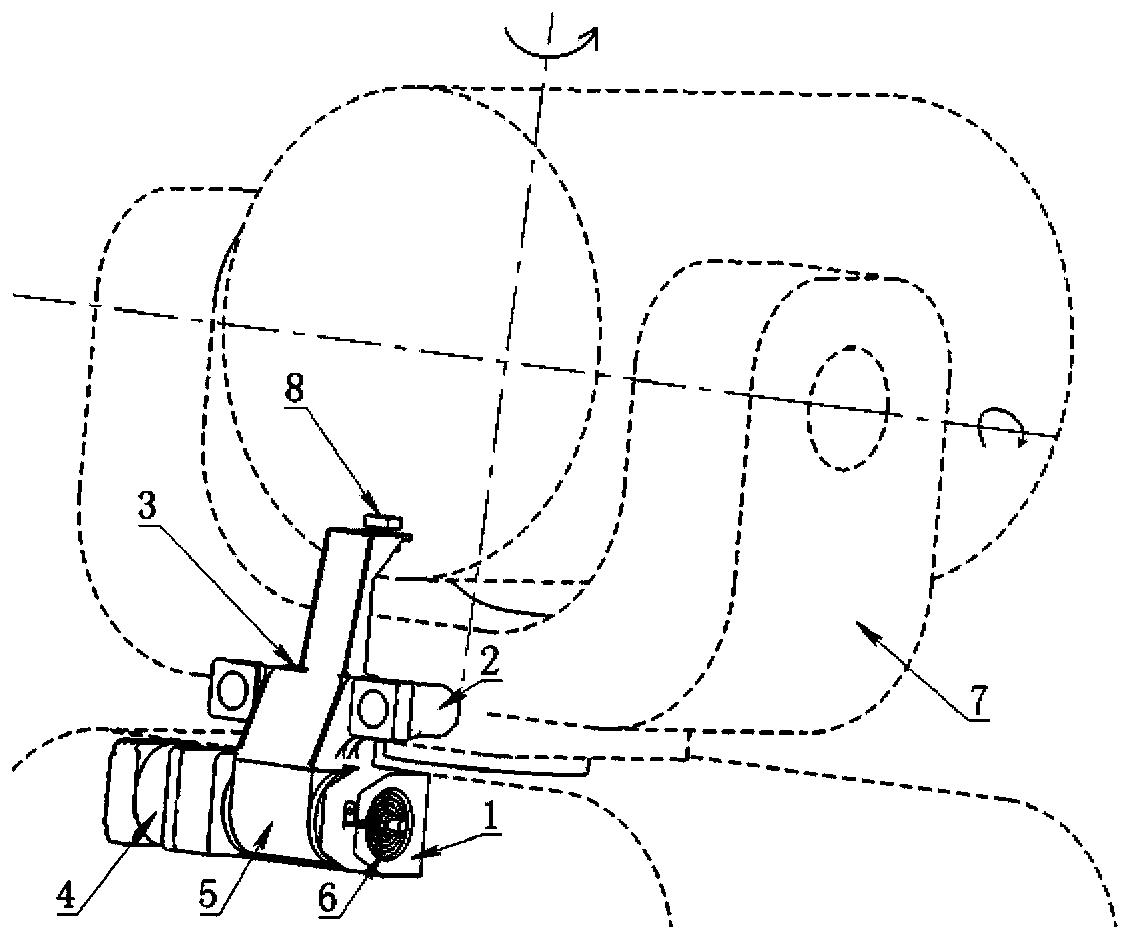
1、二维转动设备锁定装置由方位转动顶紧装置2、锁紧机械臂3、电磁制动器4、锁紧轴系5、解锁扭簧6及锁定装置底座1组成。方位转动顶紧装置(2)固定在锁紧机械臂(3)安装孔内,锁紧机械臂(3)固定在锁紧轴系(5)安装平台的端面,锁紧机械臂(3)顶端挡板插入两个俯仰转动限位挡块(8)之间;所述的解锁扭簧(6)固定在锁紧轴系(5)一侧;所述的电磁制动器(4)固定在锁紧轴系(5)的另一侧。
2、锁紧机械臂3顶端挡板插入俯仰转动限位装置8中,方位顶紧装置2顶紧二维转动设备7底部,电磁制动器4断电制动锁紧轴系5时,二维转动设备处于锁定状态。
3、电磁制动器4上电制动解除后,解锁扭簧6释放扭力矩将锁紧机械臂3沿锁紧轴系5转动,旋离二维转动设备7工作区域,锁定状态解除,二维转动设备可以进行转动工作。
本发明的优点在于:
1)本发明通过单点锁定及解除锁定来实现对两维转动的锁定及锁定解除,从而使可靠性得到极大的提高;
2)本发明通过弹性顶紧装置实现对大惯量方位转动的锁定,通过柔性限位装置对携带光电负载的俯仰转动进行锁定,从而实现在振动环境中对轴系及光电负载的保护作用;
3)本发明对二维转动设备锁定时,利用失电型电磁制动器来实现锁定装置的位置锁定;当需要解除锁定时,利用解锁扭簧释放存储的变形能使锁紧装置旋离二维转动设备工作区;再次对电磁制动器断电,使锁定装置非常可靠地保持制动解除位置。
附图说明:
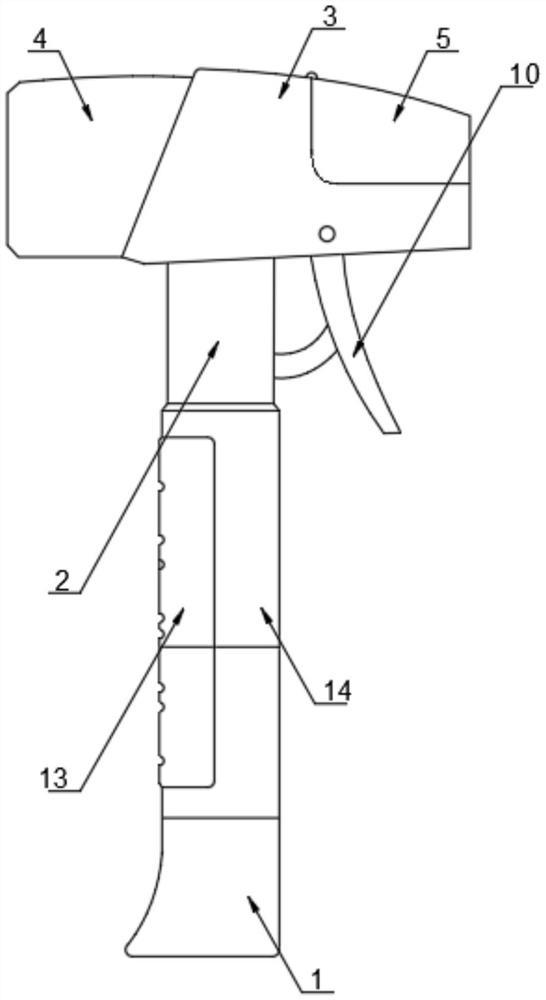
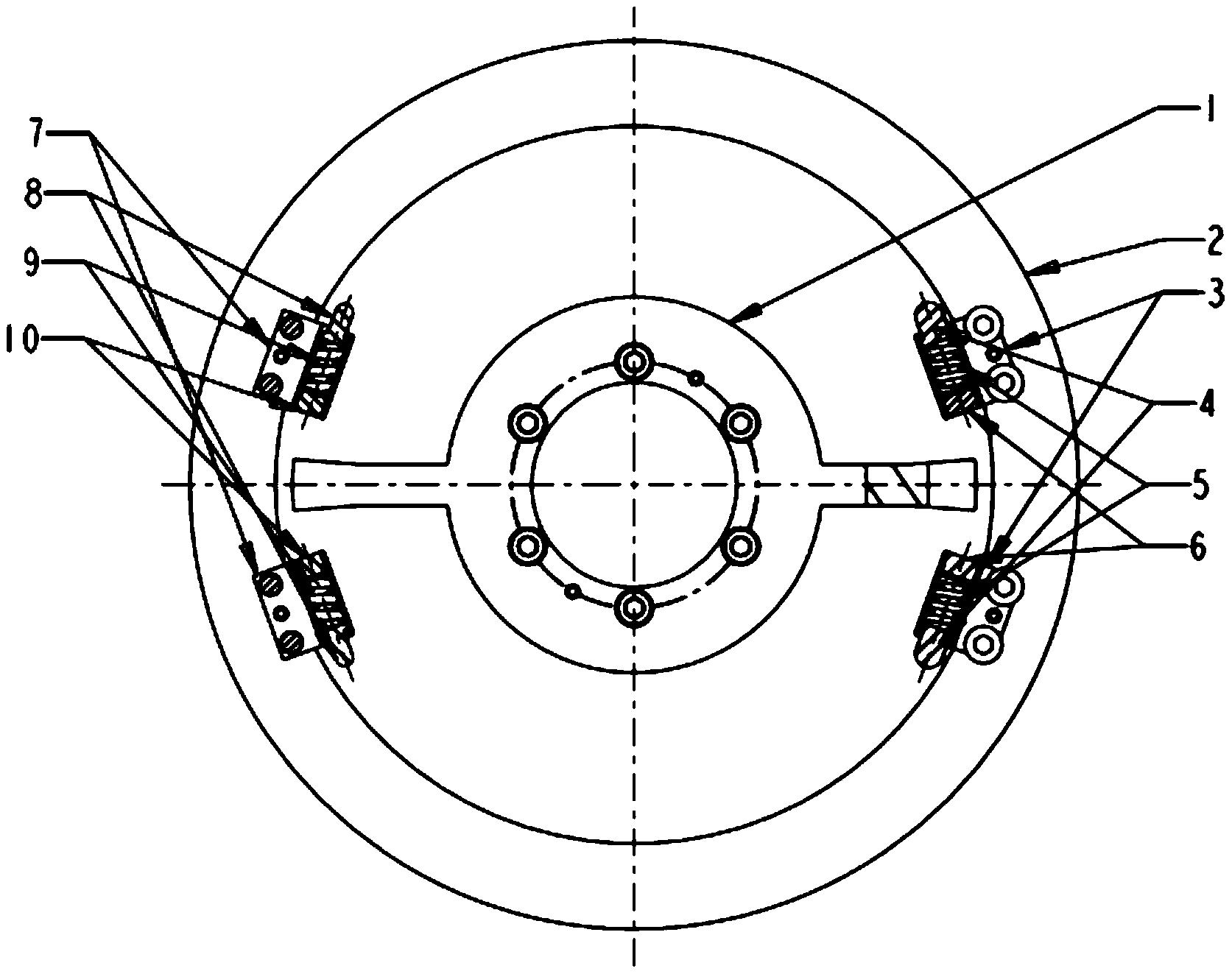
图1是本发明锁定装置结构示意图;
图中:1——锁定装置底座;
2——方位转动顶紧装置;
3——锁紧机械臂;
4——电磁制动器;
5——锁紧轴系;
6——解锁扭簧。
图2是本发明装置两种功能状态图,a.锁定状态;b.锁定解除状态。
图3是方位转动顶紧装置2的结构组成示意图;
图中:2-1——活塞;
2-2——套筒;
2-3——弹簧;
2-4——螺纹压盖。
图4是锁紧轴系5的结构组成示意图;
图中:5-1——制动端转轴;
5-2——轴承1;
5-3——轴系台面;
5-4——解锁端转轴;
5-5——轴承2;
5-6——轴承外压圈;
5-7——轴承内压圈。
图5是俯仰转动限位装置8的结构组成示意图;
图中:8-1——支架;
8-2——弹性阻尼块。
具体实施方式:
下面根据图1至图4给出本发明一个较好实施例,用以说明本发明的结构特征和实施方法,而非用来限定本发明的范围。
本实施例中锁定装置包括如下几个部分:方位转动顶紧装置(2)、锁紧机械臂(3)、电磁制动器(4)、锁紧轴系(5)、解锁扭簧(6)、锁定装置底座(1)以及二维光电转台(7)和俯仰转动限位装置(8)。总重量小于1.2KG。
1)锁紧机械臂(3):由轻质、高模量的铝基复合材料整体加工成型,其底部较宽,用于安装;顶部伸出挡板实现俯仰转动限位;中部“两翼”外伸用于 方位转动顶紧装置安装。本实施例中锁紧机械臂可由锁紧轴系(5)来支撑并绕其转动,当转至竖直状态时,锁紧机械臂实现对二维光电转台的锁定;转至水平状态时,锁紧机械臂旋离转台工作区,实现锁定解除。
2)方位转动顶紧装置(2)与俯仰转动限位装置(8):分别实现对二维光电转台(7)方位转动和俯仰转动的锁定。本实施例方位转动顶紧装置(2)安装在锁紧机械臂(3)中部外伸“两翼”,左右各安装一个。每个顶紧装置由铝合金套筒(2-2),安装在套筒(2-2)内孔中的聚酰亚胺制造的活塞(2-1),通过弹簧(2-3)和旋入套筒(2-2)内孔尾部内螺纹的螺纹压盖(2-4)压靠在套筒(2-2)内孔前部挡肩上。活塞(2-1)顶紧二维光电转台(7)底部,实现方位转动锁定;俯仰转动限位装置(8)由铝合金支架(8-1)及安装在其上的两个弹性阻尼块(8-2)组成,对伸入其中的锁紧机械臂(3)顶端挡板限位,实现俯仰转动锁定;
3)电磁制动器(4):制动器为失电型双面干式电磁制动器,失电制动、上电制动解除。作用是将锁定装置保持在锁定位置或锁定解除位置。本实施例中电磁制动器(4)安装在锁紧轴系(5)一侧,通过渐开线花键与锁紧轴系(5)转轴配合,实现对锁紧轴系(5)的制动,从而保持锁紧机械臂(3)处于锁定位置。电磁制动器(4)失电时可以提供8N·m的制动力矩,上电时同过电磁吸合力解除制动。
4)锁紧机构轴系(5)由布置在两侧的两个背对背安装的71904型轴承(5-2、5-5)支撑,轴承通过内压圈(5-7)与转轴(5-1、5-4)固定,通过外压圈(5-6)与锁紧装置底座(1)固定。由于太空低温、高真空使用环境要求,轴承经固体润滑,防冷焊处理。制动端转轴(5-1)通过其轴段上直接加工成外渐开线花键与电磁制动器(4)连接;解锁端转轴(5-4)尾端安装解锁扭簧(6)。
5)解锁扭簧(6):解锁扭簧(6)的作用是在电磁制动器(6)上电制动解除后,释放形变能带动锁紧机械臂旋离二维光电转台(7)工作区域。本实施例中解锁扭簧(6)由1Cr18Ni9Ti制备的平面蜗卷弹簧实现,一端固定在锁紧轴系(5)解锁端转轴(5-4),另一端固定在锁定装置底座(1)上。锁定时存储形变能,解除锁定时释放。
6)锁定装置底座(1)及二维光电转台(7):锁紧装置底座(1)对整个锁定装置起过渡与支撑作用,由TC4钛合金整体加工制造而成,外形呈扁平“U”字型,底部安装、“两臂”开孔,内孔及端面共镗加工成型,分别为锁紧机构轴系(5)、解锁扭簧(6)和电磁制动器(4)提供优良的安装、定位基础。本实施例二维光电转台(7)总重量30KG,其方位转动范围-90°~+90°,俯仰转动范围-30°~+70°,要求工作前对其进行锁定,工作时进行锁定解除,不需要再次重复锁定。
如上所述,锁定装置可将二维转动设备的两维转动有效地锁定,并可以在二维转动设备工作前,实现可靠性极高地的锁定解除。同时,在方位转动锁定中设计方位转动弹性顶紧装置,在俯仰转动锁定中设计柔性限位装置,可以在实现两维转动锁定的同时,实现对方位轴系的振动抑制和俯仰轴系光电负载和保护作用。
一种二维转动设备的锁定装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0