








专利摘要
本发明涉及自适应光学系统中波前信号的测量。一种基于压缩感知的波前探测器,包括变形镜、波前传感器和计算机,变形镜对波前信息进行下采样然后通过波前传感器得到压缩采样的波前斜率信息传输到计算机,计算机通过重构算法得到完整的波前信息。本发明降低了对硬件的高要求,解决了大量数据存储和传输的问题,提供一种低成本,效果优良的波前探测系统。
权利要求
1.一种基于压缩感知的波前探测器,其特征在于,包括变形镜、波前传感器和计算机,变形镜对波前信息进行下采样然后通过波前传感器得到压缩采样的波前斜率信息传输到计算机,计算机通过重构算法得到完整的波前信息,计算机通过重构算法得到完整的波前信息的步骤如下:
步骤一、建立直角坐标系,以平行于波前传感器中心轴线的方向为Z轴方向,以波前传感器的微透镜阵列平面内的任意一条横向直线为X轴方向,以波前传感器的微透镜阵列平面内的任意一条纵向直线为Y轴方向,射到波前传感器的微透镜阵列平面内的波与Z轴的偏移量即与Z轴的夹角能通过该波与X方向夹角和该波与Y方向夹角确定,波前信号φ对应的X轴方向的斜率信号G
斜率信号G
斜率信号G
其中α、β中不为零的数据有k个,k<<N×N,
波前信号φ具有低频多高频少的特点,利用这一特点,通过黄金分割法在频率域对频率分布进行分割,得到符合黄金分割法的频率序列F=[f
得到大小为N×N的矩阵,将该矩阵分割为
步骤二、变形镜上有与波前传感器子孔径一一对应的变形镜子孔径,通过变形镜的上加载的采样矩阵Φ对波前信息进行下采样,采样矩阵Φ为一个M×N的矩阵,矩阵中每个元素的取值为0或者1,其中M<N,其中1代表通,0代表断,波前传感器得到波前斜率信号的测量信号,X轴方向的测量信号CS
步骤三、由公式CS
步骤四、通过对波前信号φ对应的X轴方向的斜率信号G
说明书
技术领域
本发明涉及自适应光学系统中波前信号的测量。
背景技术
在自适应光学系统,为有效地克服湍流波前的干扰,提高图像的分辨率,在自适应光学系统中,波前探测器承担着对湍流动态变化造成的波前扰动实时测量的任务。随着观测图像的分辨率提高,波前探测器必须具备高帧频和微观探测能力,同时自适应光学系统的实时控制依托于波前测量的后期处理技术,这要求波前探测数据量尽可能的小以便传输和存储。在自适应光学系统中,如果变形镜的驱动单元增加,要求高空间分辨率的波前探测器与之匹配,波前探测器的分辨率的提高会使其波前探测能力大幅度下降,这对波前探测器有更加高要求的硬件需求。如果探测器的数量增多,波前探测的数据量增大,也带来大量的数据传输和存储的压力。这都给自适应光学系统实时控制及基于波前信息的数据后期处理提出了苛刻的要求。
传统的全采样方法,不但会产生大量的波前探测数据,且对数据的传输和存储有巨大压力,会降低信息的实时性;压缩感知理论为解决上述问题提供了新的途径。压缩感知理论充分利利用波前信息的可压缩性实现探测数据的压缩采集。在波前信息满足可以稀疏表示的理论前提下,将信号的稀疏性和采样相结合,可在低数据量的前提下,实现波前信息的精确重建。将压缩感知理论,对波前湍流的采样方法进行突破,在信号采集的过程中打破传统的Nyquist采样定理,在信号采集时直接对实时信号压缩采集,只将少量的有用信息进行传输。在压缩重建模块,利用采集到的少量的波前测量信息精确地重建出精确的波前相位。这样不但可以降低数据的传输与存储,同时提高了波前探测器的微光探测能力,降低对光电信号采集系统像素数目的要求,可以提高波前探测的帧频。因此,压缩感知技术在波前探测规程中可以发挥很重要的作用。
对基于压缩感知的波前探测系统,最主要的部分包括:1)设计能够很好稀疏表示波前斜率的稀疏字典。2)在变形镜加载采样矩阵。3)对斜率信号采样得到测量信号,4)测量信号进行重构,得到波前斜率信号,5)通过区域法复原波前信号,完成波前信号的探测。
发明内容
本发明所要解决的技术问题是:如何克服变形镜的驱动单元增加带来的波前探测器的高的硬件需求,以及大量数据传输和存储的问题,提供一种基于压缩感知技术的波前探测系统,降低对硬件的高要求和解决大量数据存储和传输的问题。本发明所采用的技术方案是:一种基于压缩感知的波前探测器,包括变形镜、波前传感器和计算机,变形镜对波前信息进行下采样然后通过波前传感器得到压缩采样的波前斜率信息传输到计算机,计算机通过重构算法得到完整的波前信息,完整的波前信息计算步骤如下:
步骤一、建立直角坐标系,以平行于波前传感器中心轴线的方向为Z轴方向,以波前传感器的微透镜阵列平面内的任意一条横向直线为X轴方向,以波前传感器的微透镜阵列平面内的任意一条纵向直线为Y轴方向,射到波前传感器的微透镜阵列平面内的波与Z轴的偏移量即与Z轴的夹角能通过该波与X方向夹角和该波与Y方向夹角确定,波前信号φ对应的X轴方向的斜率信号Gx,波前信号φ对应的Y轴方向的斜率信号Gy,波前传感器的微透镜阵列平面上有N×N个子孔径,通过波前信息的特征建立起能够稀疏表示出波前斜率信号的稀疏字典Ψ,使得波前斜率信号等于极少量的系数乘以稀疏字典Ψ,即Gx=Ψα,Gy=Ψβ,α,β表示对应X轴方向和Y轴方向的斜率信号的系数,Gx、Gy、α、β、Ψ都为一个N×N的矩阵,
斜率信号Gx表示为
斜率信号Gy表示为
其中α、β中不为零的数据有k个,k<<N×N,
波前信号φ具有低频多高频少的特点,利用这一特点,通过黄金分割法在频率域对频率分布进行分割,得到符合黄金分割法(见李娟娟等."大气湍流畸变波前斜率的稀疏分解."光电工程2(2018))的频率序列F=[f1,f2,f3,...,fn],将F代入
得到大小为N×N的矩阵,将该矩阵分割为 的小块,得到N个块组成稀疏字典Ψ,其中m、n都为大于0小于等于N的正整数,u、v都为F中的某一个频率,j为虚数单位;
步骤二、变形镜上有与波前传感器子孔径一一对应的变形镜子孔径,通过变形镜的上加载的采样矩阵Φ对波前信息进行下采样,采样矩阵Φ为一个M×N的矩阵,矩阵中每个元素的取值为0或者1,其中M<N,其中1代表通,0代表断,波前传感器得到波前斜率信号的测量信号,X轴方向的测量信号CSx=ΦGx,Y轴方向的测量信号CSy=ΦGy,CSx和CSy都为一个M×N矩阵;
步骤三、由公式CSx=ΦΨα=Aα和CSy=ΦΨβ=Aβ,通过迭代权重最小二乘法(见Chartrand,Rick,and W.Yin."Iteratively reweighted algorithms for compressivesensing."(2008):3869-3872),求解得到α、β,通过Gx=Ψα,Gy=Ψβ获得波前信号φ对应的X轴方向的斜率信号Gx和波前信号φ对应的Y轴方向的斜率信号Gy;
步骤四、通过对波前信号φ对应的X轴方向的斜率信号Gx和波前信号φ对应的Y轴方向的斜率信号Gy使用区域法复原出波前信号φ(区域法复原见张强,姜文汉,and许冰."用于Hartmann-Shack波前探测器的区域法算法研究."强激光与粒子束10.2(1998):0-0)。
本发明的有益效果是:本发明降低了对硬件的高要求,解决了大量数据存储和传输的问题,提供一种低成本,效果优良的波前探测系统。
附录说明
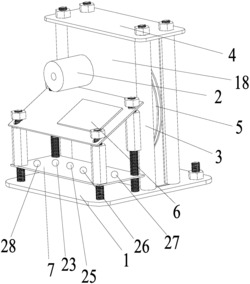
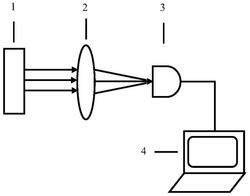
图1为本发明的结构示意图;
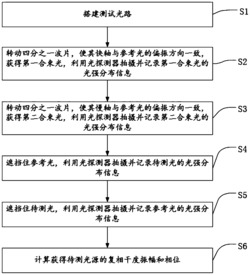
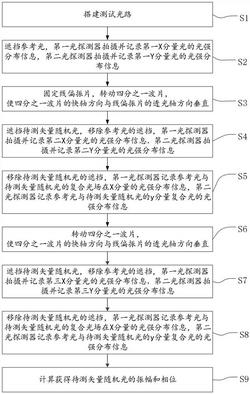
图2为本发明流程示意图;
图3是波前斜率信号的稀疏字典Ψ图;
图4是表示原始的波前信号图;
图5表示复原的波前信号图;
图6表示二者的误差值图
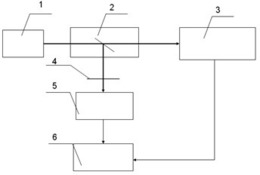
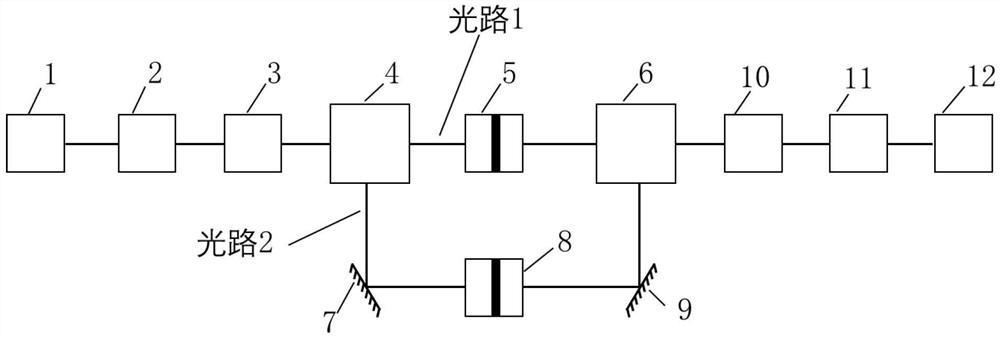
其中,1、大气湍流,2、变形镜,3、波前传感器,4、计算机,5、采样矩阵Φ。
具体实施方式
结合图1的结构示意图和图2的流程示意图,一种基于压缩感知的波前探测器,包括变形镜2、波前传感器3和计算机4,变形镜1对大气湍流1导致的波前信息进行下采样然后通过波前传感器3得到压缩采样的波前斜率信息传输到计算机4,计算机4通过重构算法得到完整的波前信息,完整的波前信息计算步骤如下:
步骤一、建立直角坐标系,以平行于波前传感器中心轴线的方向为Z轴方向,以波前传感器3的微透镜阵列平面内的任意一条横向直线为X轴方向,以波前传感器3的微透镜阵列平面内的任意一条纵向直线为Y轴方向,射到波前传感器3的微透镜阵列平面内的波与Z轴的偏移量即与Z轴的夹角能通过该波与X方向夹角和该波与Y方向夹角确定,波前信号φ对应的X轴方向的斜率信号Gx,波前信号φ对应的Y轴方向的斜率信号Gy,波前传感器3的微透镜阵列平面上有256×256个子孔径,通过波前信息的特征建立起能够稀疏表示出波前斜率信号的稀疏字典Ψ,使得波前斜率信号等于极少量的系数乘以稀疏字典Ψ,即Gx=Ψα,Gy=Ψβ,α,β表示对应X轴方向和Y轴方向的斜率信号的系数,Gx、Gy、α、β、Ψ都为一个256×256的矩阵,
斜率信号Gx表示为
斜率信号Gy表示为
其中α、β中不为零的数据有3277个,
波前信号φ具有低频多高频少的特点,利用这一特点,通过黄金分割法(见李娟娟等."大气湍流畸变波前斜率的稀疏分解."光电工程2(2018))在频率域对频率分布进行分割,得到符合黄金分割法的频率序列F=[2.55×10
得到大小为N×N的矩阵,将该矩阵分割为16×16的小块,得到256个块组成稀疏字典Ψ,其中m、n都为大于0小于等于256的正整数,u、v都为F中的某一个频率,j为虚数单位,图3是波前斜率信号的稀疏字典Ψ;
步骤二、变形镜2上有与波前传感器3的子孔径一一对应的变形镜3的子孔径,通过变形镜3的上加载的采样矩阵Φ5对波前信息进行下采样,采样矩阵Φ5为一个12×256的矩阵,矩阵中每个元素的取值为0或者1,其中1代表通,0代表断,波前传感器3得到波前斜率信号的测量信号,X轴方向的测量信号CSx=ΦGx,Y轴方向的测量信号CSy=ΦGy,CSx和CSy都为一个12×256矩阵;
步骤三、由公式CSx=ΦΨα=Aα和CSy=ΦΨβ=Aβ,通过计算机4运用迭代权重最小二乘法(见Chartrand,Rick,and W.Yin."Iteratively reweighted algorithms forcompressive sensing."(2008):3869-3872),求解得到α、β,再通过Gx=Ψα,Gy=Ψβ获得波前信号φ对应的X轴方向的斜率信号Gx和波前信号φ对应的Y轴方向的斜率信号Gy;
步骤四、通过对波前信号φ对应的X轴方向的斜率信号Gx和波前信号φ对应的Y轴方向的斜率信号Gy使用区域法复原出波前信号φ("用于Hartmann-Shack波前探测器的区域法算法研究."强激光与粒子束10.2(1998):0-0)。图4表示原始的波前信号,图5表示复原的波前信号,图6表示二者的误差值。
一种基于压缩感知的波前探测系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0