





专利摘要
本发明公开了一种测量风速和风向的方法及系统,首先获取待测风的风速范围、风向范围;其次建立一个用于发射信号的发射阵元和四个用于接收信号的接收阵元组成的一发四收弧形阵列结构,并以其中一个接收阵元为基准阵元,获取发射阵元发射的信号到达接收阵元时相对于发射阵元发射的信号到达基准阵元时的时延计算表达式;再根据时延计算表达式和待测风的风速范围、风向范围,采用波束形成算法,计算波束形成器输出功率的最大值并确定此最大值对应的风速和风向为风的风速和风向。即本发明是通过信号到达接收阵元相对于信号到达基准阵元时的时延和波束形成算法来确定风向和风速,避免时差法测量误差而引起风信息误差的问题,提高测量精度和测量速度。
权利要求
1.一种测量风速和风向的方法,其特征在于,所述方法包括:
获取待测风信息;所述待测风信息包括待测风的风速范围和待测风的风向范围;
建立一发四收弧形阵列结构;所述一发四收弧形阵列结构包括一个用于发射信号的发射阵元和四个用于接收信号的接收阵元;所述接收阵元接收所述发射阵元发射的信号;
以所述一发四收弧形阵列结构中的一个所述接收阵元为基准阵元,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;
根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向。
2.根据权利要求1所述的方法,其特征在于,所述以所述一发四收弧形阵列结构中的一个所述接收阵元为基准阵元,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式,具体包括:
获取所述信号向第i个所述接收阵元的速度传播公式;所述速度传播公式为:
式(1)中α为相邻两个所述接收阵元与所述发射阵元连线的夹角,θ为待测风的风向,v为待测风的风速;
获取所述信号到达第i个所述接收阵元的时间计算表达式;所述时间计算表达式为:
式(2)中c为声波的传播速度,Vi表示所述信号向第i个所述接收阵元传播的速度;R为所述接收阵元到所述发射阵元的距离;
根据所述时间计算表达式,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;所述时延计算表达式为:
3.根据权利要求2所述的方法,其特征在于,在根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向之前,所述方法还包括:
根据公式(4)确定所述发射阵元发射的所述信号;所述公式(4)为:
s1(t)=u1(t)ej[wt+φ(t)] (4);
式(4)中u1(t)为所述信号的幅度, 为所述信号的相位;w=2πf,f为发射信号的频率;
根据公式(5)确定所述接收阵元接收到的信号;所述公式(5)为:
xi(t)=s1(t-τi)+ni(t)(5);
式(5)中ni(t)为第i个所述接收阵元接收到的噪声,且各所述接收阵元接收的噪声之间彼此独立;τi表示所述信号到达第i个所述接收阵元相对于所述信号到达所述基准阵元的时延;
根据所述公式(3)、所述公式(4)和所述公式(5),计算所述一发四收弧形阵列结构的阵列流型矢量;所述阵列流型矢量表示为:
4.根据权利要求3所述的方法,其特征在于,所述根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向,具体包括:
根据公式(7)确定所述波束形成算法的加权矢量;所述公式(7)为:
式(7)中定义所述阵列流型矢量为所述波束形成算法的加权矢量;
根据所述波束形成算法的加权矢量,确定所述波束形成器输出功率的计算公式;所述波束形成器输出功率的计算公式为:
F(θ,v)=WHQW=aH(θ,v)Qa(θ,v) (8);
式(8)中Q为x(t)的协方差矩阵,即Q=E[x(t)xH(t)];其中,
N表示采样点数;H表示复数矩阵的共轭转置;
根据所述待测风信息和所述公式(8),计算风的风速和风向。
5.根据权利要求4所述的方法,其特征在于,所述根据所述待测风信息和所述公式(8),计算风的风速和风向,具体包括:
根据所述待测风信息和所述公式(8),计算所述波束形成器输出功率的最大值,并将所述波束形成器输出功率的最大值时对应的风速和风向确定为风的风速和风向。
6.一种测量风速和风向的系统,其特征在于,所述系统包括:
待测风信息获取模块,用于获取待测风信息;所述待测风信息包括待测风的风速范围和待测风的风向范围;
一发四收弧形阵列结构建立模块,用于建立一发四收弧形阵列结构;所述一发四收弧形阵列结构包括一个用于发射信号的发射阵元和四个用于接收信号的接收阵元;所述接收阵元接收所述发射阵元发射的信号;
时延计算表达式获取模块,用于以所述一发四收弧形阵列结构中的一个所述接收阵元为基准阵元,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;
风速和风向计算模块,用于根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向。
7.根据权利要求6所述的系统,其特征在于,所述时延计算表达式获取模块具体包括:
速度传播公式获取单元,用于获取所述信号向第i个所述接收阵元的速度传播公式;所述速度传播公式为:
式(1)中α为相邻两个所述接收阵元与所述发射阵元连线的夹角,θ为待测风的风向,v为待测风的风速;
时间计算表达式获取单元,用于获取所述信号到达第i个所述接收阵元的时间计算表达式;所述时间计算表达式为:
式(2)中c为声波的传播速度,Vi表示所述信号向第i个所述接收阵元传播的速度;R为所述接收阵元到所述发射阵元的距离;
时延计算表达式获取单元,用于根据所述时间计算表达式,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;所述时延计算表达式为:
8.根据权利要求7所述的系统,其特征在于,所述系统还包括:
发射信号确定模块,用于根据公式(4)确定所述发射阵元发射的所述信号;所述公式(4)为:
s1(t)=u1(t)ej[wt+φ(t)] (4);
式(4)中u1(t)为所述信号的幅度, 为所述信号的相位;w=2πf,f为发射信号的频率;
接收信号确定模块,用于根据公式(5)确定所述接收阵元接收到的信号;所述公式(5)为:
xi(t)=s1(t-τi)+ni(t)(5);
式(5)中ni(t)为第i个所述接收阵元接收到的噪声,且各所述接收阵元接收的噪声之间彼此独立;τi表示所述信号到达第i个所述接收阵元相对于所述信号到达所述基准阵元的时延;
阵列流型矢量计算模块,用于根据所述公式(3)、所述公式(4)和所述公式(5),计算所述一发四收弧形阵列结构的阵列流型矢量;所述阵列流型矢量表示为:
9.根据权利要求8所述的系统,其特征在于,所述风速和风向计算模块,具体包括:
加权矢量确定单元,用于根据公式(7)确定所述波束形成算法的加权矢量;所述公式(7)为:
式(7)中定义所述阵列流型矢量为所述波束形成算法的加权矢量;
波束形成器输出功率计算公式确定单元,用于根据所述波束形成算法的加权矢量,确定所述波束形成器输出功率的计算公式;所述波束形成器输出功率的计算公式为:
F(θ,v)=WHQW=aH(θ,v)Qa(θ,v) (8);
式(8)中Q为x(t)的协方差矩阵,即Q=E[x(t)xH(t)];其中,
N表示采样点数;H表示复数矩阵的共轭转置;
风速和风向计算单元,用于根据所述待测风信息和所述公式(8),计算风的风速和风向。
10.根据权利要求9所述的系统,其特征在于,所述风速和风向计算单元,具体包括:
风速和风向计算子单元,用于根据所述待测风信息和所述公式(8),计算所述波束形成器输出功率的最大值,并将所述波束形成器输出功率的最大值时对应的风速和风向确定为风的风速和风向。
说明书
技术领域
本发明涉及测风领域,特别是涉及一种测量风速和风向的方法及系统。
背景技术
风是一种最常见的自然现象,在气象、航空、军事、高铁、航海等方面,对风速和风向的准确测量要求很高。目前市场上使用的大多是时差法的超声波测风仪、机械式测风仪、热敏式测风仪等,但是这些测风仪在测量精度、测量范围和抗干扰性方面均存在一定的缺陷。例如,基于时差法制作的超声波测风仪的缺点:对时间的测量存在误差且该误差不能消除,进而引起测风信息的误差;机械式测风仪器缺点:有机械磨损,对微风和强风的测量精度不够,寿命短,维护成本高;热敏式测风仪的缺点:由于测风原理的限制,其对风速测量范围十分有限,且灵敏度不高。因此,如何能够高精度的获取风速和风向,是目前测风领域急需要解决的技术问题。
发明内容
本发明的目的是提供一种测量风速和风向的方法及系统,是对基于时差法的超声波测风仪的一种改进,避免由于时间测量误差而引起测风信息的误差,提高了测量精度。
为实现上述目的,本发明提供了如下方案:
一种测量风速和风向的方法,所述方法包括:
获取待测风信息;所述待测风信息包括待测风的风速范围和待测风的风向范围;
建立一发四收弧形阵列结构;所述一发四收弧形阵列结构包括一个用于发射信号的发射阵元和四个用于接收信号的接收阵元;所述接收阵元接收所述发射阵元发射的信号;
以所述一发四收弧形阵列结构中的一个所述接收阵元为基准阵元,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;
根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向。
可选的,所述以所述一发四收弧形阵列结构中的一个所述接收阵元为基准阵元,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式,具体包括:
获取所述信号向第i个所述接收阵元的速度传播公式;所述速度传播公式为:
式(1)中α为相邻两个所述接收阵元与所述发射阵元连线的夹角,θ为待测风的风向,v为待测风的风速;
获取所述信号到达第i个所述接收阵元的时间计算表达式;所述时间计算表达式为:
式(2)中c为声波的传播速度,Vi表示所述信号向第i个所述接收阵元传播的速度;R为所述接收阵元到所述发射阵元的距离;
根据所述时间计算表达式,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;所述时延计算表达式为:
可选的,在根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向之前,所述方法还包括:
根据公式(4)确定所述发射阵元发射的所述信号;所述公式(4)为:
s1(t)=u1(t)ej[wt+φ(t)] (4);
式(4)中u1(t)为所述信号的幅度, 为所述信号的相位;w=2πf,f为发射信号的频率;
根据公式(5)确定所述接收阵元接收到的信号;所述公式(5)为:
xi(t)=s1(t-τi)+ni(t) (5);
式(5)中ni(t)为第i个所述接收阵元接收到的噪声,且各所述接收阵元接收的噪声之间彼此独立;τi表示所述信号到达第i个所述接收阵元相对于所述信号到达所述基准阵元的时延;
根据所述公式(3)、所述公式(4)和所述公式(5),计算所述一发四收弧形阵列结构的阵列流型矢量;所述阵列流型矢量表示为:
可选的,所述根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向,具体包括:
根据公式(7)确定所述波束形成算法的加权矢量;所述公式(7)为:
式(7)中定义所述阵列流型矢量为所述波束形成算法的加权矢量;
根据所述波束形成算法的加权矢量,确定所述波束形成器输出功率的计算公式;所述波束形成器输出功率的计算公式为:
F(θ,v)=WHQW=aH(θ,v)Qa(θ,v) (8);
式(8)中Q为x(t)的协方差矩阵,即Q=E[x(t)xH(t)];其中, N表示采样点数;H表示复数矩阵的共轭转置;
根据所述待测风信息和所述公式(8),计算风的风速和风向。
可选的,,所述根据所述待测风信息和所述公式(8),计算风的风速和风向,具体包括:
根据所述待测风信息和所述公式(8),计算所述波束形成器输出功率的最大值,并将所述波束形成器输出功率的最大值时对应的风速和风向确定为风的风速和风向。
本发明还提供了一种测量风速和风向的系统,所述系统包括:
待测风信息获取模块,用于获取待测风信息;所述待测风信息包括待测风的风速范围和待测风的风向范围;
一发四收弧形阵列结构建立模块,用于建立一发四收弧形阵列结构;所述一发四收弧形阵列结构包括一个用于发射信号的发射阵元和四个用于接收信号的接收阵元;所述接收阵元接收所述发射阵元发射的信号;
时延计算表达式获取模块,用于以所述一发四收弧形阵列结构中的一个所述接收阵元为基准阵元,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;
风速和风向计算模块,用于根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向。
可选的,所述时延计算表达式获取模块具体包括:
速度传播公式获取单元,用于获取所述信号向第i个所述接收阵元的速度传播公式;所述速度传播公式为:
式(1)中α为相邻两个所述接收阵元与所述发射阵元连线的夹角,θ为待测风的风向,v为待测风的风速;
时间计算表达式获取单元,用于获取所述信号到达第i个所述接收阵元的时间计算表达式;所述时间计算表达式为:
式(2)中c为声波的传播速度,Vi表示所述信号向第i个所述接收阵元传播的速度;R为所述接收阵元到所述发射阵元的距离;
时延计算表达式获取单元,用于根据所述时间计算表达式,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;所述时延计算表达式为:
可选的,所述系统还包括:
发射信号确定模块,用于根据公式(4)确定所述发射阵元发射的所述信号;所述公式(4)为:
s1(t)=u1(t)ej[wt+φ(t)] (4);
式(4)中u1(t)为所述信号的幅度, 为所述信号的相位;w=2πf,f为发射信号的频率;
接收信号确定模块,用于根据公式(5)确定所述接收阵元接收到的信号;所述公式(5)为:
xi(t)=s1(t-τi)+ni(t) (5);
式(5)中ni(t)为第i个所述接收阵元接收到的噪声,且各所述接收阵元接收的噪声之间彼此独立;τi表示所述信号到达第i个所述接收阵元相对于所述信号到达所述基准阵元的时延;
阵列流型矢量计算模块,用于根据所述公式(3)、所述公式(4)和所述公式(5),计算所述一发四收弧形阵列结构的阵列流型矢量;所述阵列流型矢量表示为:
可选的,所述风速和风向计算模块,具体包括:
加权矢量确定单元,用于根据公式(7)确定所述波束形成算法的加权矢量;所述公式(7)为:
式(7)中定义所述阵列流型矢量为所述波束形成算法的加权矢量;
波束形成器输出功率计算公式确定单元,用于根据所述波束形成算法的加权矢量,确定所述波束形成器输出功率的计算公式;所述波束形成器输出功率的计算公式为:
F(θ,v)=WHQW=aH(θ,v)Qa(θ,v) (8);
式(8)中Q为x(t)的协方差矩阵,即Q=E[x(t)xH(t)];其中, N表示采样点数;H表示复数矩阵的共轭转置;
风速和风向计算单元,用于根据所述待测风信息和所述公式(8),计算风的风速和风向。
可选的,所述风速和风向计算单元,具体包括:
风速和风向计算子单元,用于根据所述待测风信息和所述公式(8),计算所述波束形成器输出功率的最大值,并将所述波束形成器输出功率的最大值时对应的风速和风向确定为风的风速和风向。
根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的测量风速和风向的方法及系统,是对基于时差法的超声波测风仪的一种改进。其中,该测风方法首先获取待测风的风速范围、风向范围;其次建立一个用于发射信号的发射阵元和四个用于接收信号的接收阵元组成的一发四收弧形阵列结构,并以其中一个所述接收阵元为基准阵元,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;再根据所述时延计算表达式和所述待测风的风速范围、风向范围,采用波束形成算法,计算波束形成器输出功率的最大值,则所述波束形成器输出功率的最大值时对应的风速和风向确定为风的风速和风向。可见,本发明基于所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延来确定风的风向和风速,避免了由于时差法超声波测风仪测量的时间误差而引起测风信息的误差的问题;另外,本发明采用波束形成算法来计算风的风速和风向,相对于现有的MUSIC算法,减少了计算量,提高了计算速度。因此,采用本发明提供的方法或者系统,能够避免由于时间测量误差而引起测风信息的误差,提高测量精度和测量速度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
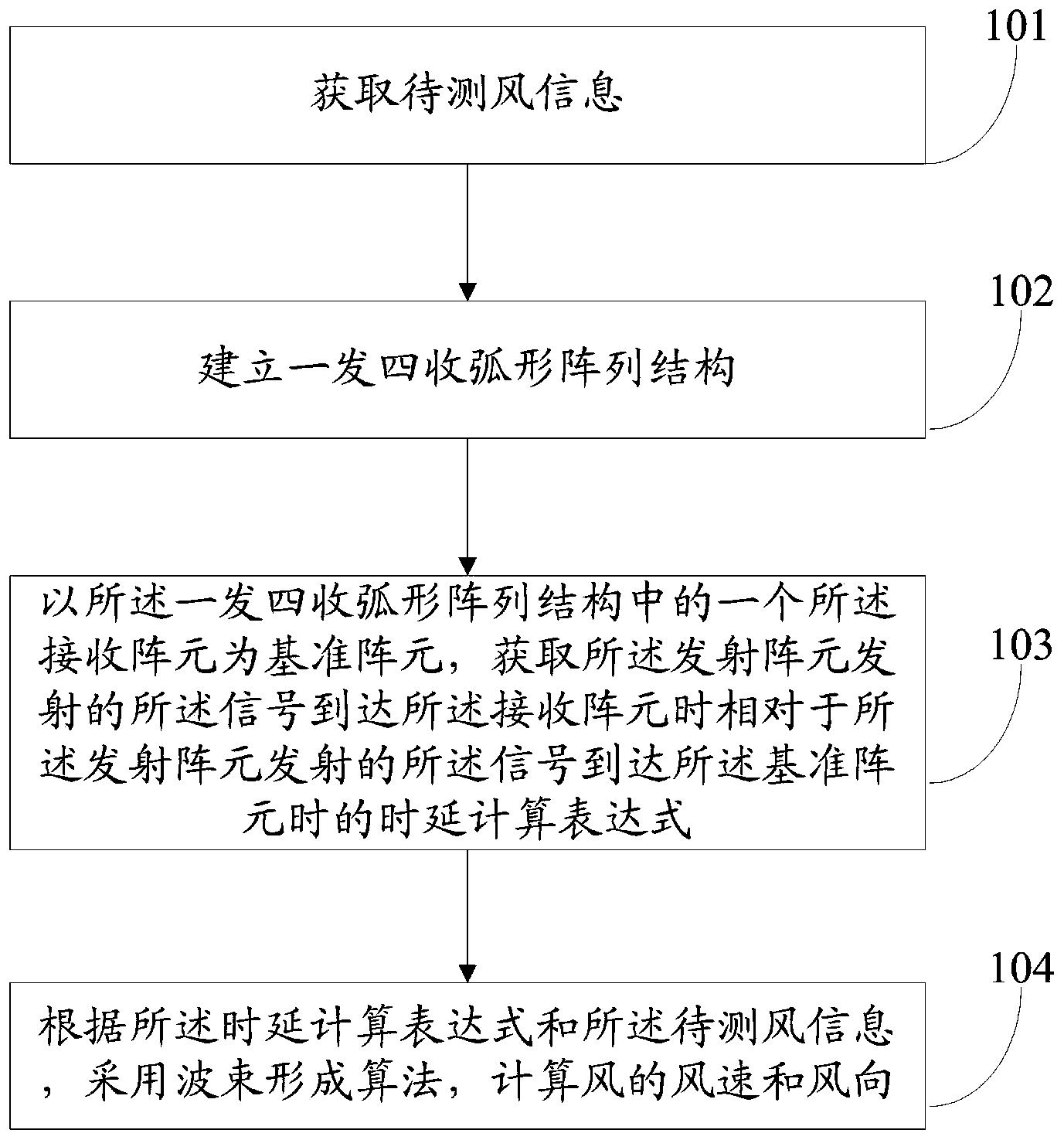
图1为本发明实施例测量风速和风向方法的流程示意图;
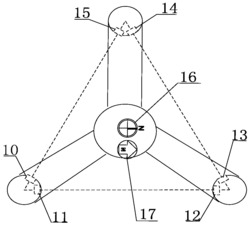
图2为本发明实施例一发四收弧形阵列结构示意图;
图3为本发明实施例V=0m/s theta=0°谱峰示意图;
图4为本发明实施例V=5.1m/s theta=45°谱峰示意图;
图5为本发明实施例V=21.3m/s theta=135°谱峰图示意图;
图6为本发明实施例V=51.7m/s theta=315°谱峰图示意图;
图7为本发明实施例V=60m/s theta=359°谱峰示意图;
图8为本发明实施例无风时测量信息仿真示意图;
图9为本发明实施例风速误差方根图;
图10为本发明实施例风向误差方根图;
图11为本发明实施例测量风速和风向系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种测量风速和风向的方法及系统,是对基于时差法的超声波测风仪的一种改进,避免由于时间测量误差而引起测风信息的误差,提高了测量精度。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
本发明所基于的物理模型是一发四收的弧形阵列,即只有一个发射阵元用来发射超声波信号,其余四个以弧形阵列排序的接收阵元来接收超声波信号,即可认为是空间中只有一个有效信号。且利用阵列信号处理的思想可以有效的增强期望信号,抑制干扰。另外,本发明采用波束形成算法来求解风速信息和风向信息。波束形成算法的主要思想是将各接收阵元输出进行加权求和,在一时间内将一发四收的弧形阵列中接收阵元接收到的信号波束“导向”到一个方向上,而对期望信号得到最大输出功率的导向位置即为所要求的参数估计。
实施例一
图1为本发明实施例测量风速和风向方法的流程示意图,如图1所示,本发明提供的测量风速和风向方法具体包括以下步骤:
步骤101:获取待测风信息;所述待测风信息包括待测风的风速范围和待测风的风向范围。
步骤102:建立一发四收弧形阵列结构;所述一发四收弧形阵列结构包括一个用于发射信号的发射阵元和四个用于接收信号的接收阵元;所述接收阵元接收所述发射阵元发射的信号。
步骤103:以所述一发四收弧形阵列结构中的一个所述接收阵元为基准阵元,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式。
步骤104:根据所述时延计算表达式和所述待测风信息,采用波束形成算法,计算风的风速和风向。
所述测量风速和风向方法还包括步骤105-107,且在执行步骤104之前,先执行步骤105-107。
步骤105:根据公式(4)确定所述发射阵元发射的所述信号;所述公式(4)为:
s1(t)=u1(t)ej[wt+φ(t)] (4);
式(4)中u1(t)为所述信号的幅度, 为所述信号的相位;w=2πf,f为发射信号的频率。
步骤106:根据公式(5)确定所述接收阵元接收到的信号;所述公式(5)为:
xi(t)=s1(t-τi)+ni(t)(5);
式(5)中ni(t)为第i个所述接收阵元接收到的噪声,且各所述接收阵元接收的噪声之间彼此独立;τi表示所述信号到达第i个所述接收阵元相对于所述信号到达所述基准阵元的时延。
步骤107:根据所述公式(3)、所述公式(4)和所述公式(5),计算所述一发四收弧形阵列结构的阵列流型矢量;所述阵列流型矢量表示为:
其中,步骤103具体包括:
步骤1031:获取所述信号向第i个所述接收阵元的速度传播公式;所述速度传播公式为:
式(1)中α为相邻两个所述接收阵元与所述发射阵元连线的夹角,θ为待测风的风向,v为待测风的风速。
步骤1032:根据公式(2)获取所述述信号到达第i个所述接收阵元的时间计算表达式;所述时间计算表达式为:
式(2)中c为声波的传播速度,Vi表示所述信号向第i个所述接收阵元传播的速度;R为所述接收阵元到所述发射阵元的距离。
步骤1033:根据所述时间计算表达式,获取所述发射阵元发射的所述信号到达所述接收阵元时相对于所述发射阵元发射的所述信号到达所述基准阵元时的时延计算表达式;所述时延计算表达式为:
步骤104具体包括:
步骤1041:根据公式(7)确定所述波束形成算法的加权矢量;所述公式(7)为:
式(7)中定义所述阵列流型矢量为所述波束形成算法的加权矢量。
步骤1042:根据所述波束形成算法的加权矢量,确定所述波束形成器输出功率的计算公式;所述波束形成器输出功率的计算公式为:
F(θ,v)=WHQW=aH(θ,v)Qa(θ,v) (8);
式(8)中Q为x(t)的协方差矩阵,即Q=E[x(t)xH(t)];其中, N表示采样点数;H表示复数矩阵的共轭转置。
步骤1043:根据所述待测风信息和所述公式(8),计算风的风速和风向。具体为根据所述待测风信息和所述公式(8),计算所述波束形成器输出功率的最大值,并将所述波束形成器输出功率的最大值时对应的风速和风向确定为风的风速和风向。
图2为本发明实施例一发四收弧形阵列结构示意图,如图2所示,所述一发四收弧形阵列结构包括一个用于发射信号的发射阵元和四个用于接收信号的接收阵元,且图2所示的接收阵元超声波传感器0,发射阵元为超声波传感器1、超声波传感器2、超声波传感器3、超声波传感器4。
将发射信号的表示为:
u1(t)为发射信号的幅度, 为发射信号的相位,w=2πf,优先f=40kHz为入射信号的频率。
此时4个接收阵元的接收信号为:xi(t)=s1(t-τi)+ni(t) (5);
ni(t)为第i个接收阵元接收到的噪声,且各接收阵元接收的噪声之间彼此独立。τi表示信号到达第i个接收阵元相对于基准阵元的时延。
根据公式(4)和公式(5)得出:
以矢量形式表示公式(9)为:x(t)=As1(t)+n(t)(10);其中,一发四收弧形阵列结构的阵列流型矢量为
而发射信号传播到各接收阵元i的时间为:
其中,c为声波的传播速度,Vi表示信号向第i个阵元传播的速度,R为各接收阵元到发射阵元的距离,优先的,本实施例R=10cm,c=340m/s。
由图2中的几何关系,运用矢量分解的方法可以得到:
其中α为相邻两个接收阵元与发射阵元连线的夹角,θ为待测风向,v为待测风速。优先的,本实施例α=20°。
以超声波传感器1为基准阵元,那么各接收阵元与基准阵元的时延τi为:
所以: 即阵列流型矢量,且在物理模型确定的前提下,A仅与时延τi有关,而τi是由风速V和风向θ确定的,所以阵列流型矢量A是由风速信息和风向信息来确定的。反过来说,风速信息和风向信息是阵列流型矢量A的确定,也就说明了风速信息和风向信息的确定,即可用阵列流型矢量A,也就是a(θ,v)来表示风速信息和风向信息。
而根据波束形成算法的最佳权矢量的思想可知:若空间中只有一个来自方向θk的电波,其方向矢量为a(θk),则当权矢量W取作a(θk)时,输出y(n)=a(θk)Ha(θk)=M最大。类比这种思想,可认为a(θ,v)是风速风向信息矢量,取加权矢量W=a(θ,v)时,可使y(n)=a(θ,v)Ha(θ,v)最大。即取加权矢量为阵列流型矢量为
而各接收阵元输出 以矢量形式表示公式(12)为:x(t)=As+n(t) (13)。
本次的期望信号只有一个,即为具有二参数风速信息与风向信息的风信号,且加权矢量的表示形式和信号矢量a(θ,v)一样,根据波束形成算法则有阵列输出 以矢量形式表示公式(14)为:y(t)=a(θ,v)Hx(t)=WHx(t)(15)。此时波束形成器输出功率为:F(θ,v)=WHQW=aH(θ,v)Qa(θ,v)(8)。Q为x(t)的协方差矩阵,即Q=E[x(t)xH(t)];其中, N表示采样点数;H表示复数矩阵的共轭转置。
此时,已将各接收阵元接收到的信号进行了加权求和,即在一时间内将一发四收弧形阵列中接收阵元接收到的信号波束“导向”了同一方向,然后只需要在matlab软件上遍历风速V和风向θ,挑出在功率谱F(θ,v)最大值处对应的V和θ便是所求的风速和风向。
另外,根据本发明所使用的是一发多收模型(接收阵元数为M,发射阵元为1,快拍数为N)。波束形成算法的主要运算步骤分为三步:一是求协方差:Q=E[x(t)xH(t)];二是求谱峰:PCBF(θ,v)=aH(θ,v)Qa(θ,v);三是谱峰搜索估计参数。
第一步求协方差的计算量:
根据协方差矩阵的定义可知,在对样本矩阵进行协方差求解时,样本矩阵的每一行是一个样本,每一列是一个维度。协方差矩阵是计算不同维度间的协方差值。比如三个维度的数集矩阵如下:a=[x y z];
则其协方差矩阵
且
所以,对于协方差Q=E[x(t)xH(t)]来说:
由于x(t)为四路通道,每路通道快拍数为N,所以x(t)为4×N阶矩阵,
即
而每次进行信号采样时,是四路通道一起采样,所以x(t)的每一列是一个样本,若对x(t)矩阵求协方差,即为
为4×4阶矩阵。
而由 只做一次协方差运算所需计算量为:
乘除法:(N-1+1+1×2)=N+2次;
加减法:((N-1)+2(N-1)+2N+1)=(5N-2)次;
所以对于整个输出x(t)所做的协方差运算量为:
乘除法:(N+2)×M2次;
加减法:(5N-2)×M2次。
第二步求谱峰的计算量:
功率谱的公式为:PCBF(θ,v)=aH(θ,v)Qa(θ,v),其中a(θ,v)为4×1阶矩阵,Q为4×4阶矩阵。所以每次求谱峰的计算量为:
乘除法:M2+M次;
加减法:(M-1)×M+(M-1)=M2-1次。
第三步进行谱峰搜索时的计算量:只需进行600×360次谱峰值的比较即可。
综上所述,利用波束形成算法测风的计算量以表格形式呈现如表1所示下:
表1波束形成算法测风的计算量
表1中的计算量仅包括波束形成算法中一些常需要循环计算的部分的统计,比如在进行谱峰搜索过程中,谱峰值的计算要进行多次,而这里我们仅统计了一次的计算量。同时,该计算量的统计对于一发多收的弧形阵列结构的测风系统具有普适性。
因此,本发明采用波束形成算法确定风速信息和风向信息,与MUSIC算法相比,算法的计算量更少,实时性更好
目前,现有技术的缺点:1.基于时差法制作的测风仪的缺点:对时间测量的误差引起测风信息的误差,且这种误差只能通过某种技术手段减少,却不能消失。2.机械式测风仪器缺点:有机械磨损,对微风和强风的测量精度不够,寿命短,维护成本高。3.热敏式测风仪的缺点:由于测风原理的限制,其对风速测量范围十分有限,且灵敏度不高。4.基于MUSIC算法来测量风信息的缺点:与本次使用的波束形成法相比,计算量大。
与现有技术相比:本发明采用的方法的主要优点有:1.与以时差法原理制作的测风仪相比,具有算法性能好的优点,从原理上把对时间的测量误差杜绝,且具有较好的抑制干扰的能力。2.与机械式的测风仪相比,无磨损,且风速风向的测量范围大和测量精度高。3.与热敏式测风仪相比,测量范围大,且测量精度大,测量结果更加稳定且灵敏。4.与MUSIC算法相比,算法的计算量更少,实时性更好。
另外,还可以在本发明所提方法的基础上使用波束形成的各种准则或者使用阵列信号处理理论中的其他可行性算法来进行风速、风向信息的测量。也可以将弧形阵列用L形或圆形等其他阵列形式来代替。
实施例二
为了验证本发明提供的方法的可行性,设计了验证可行性的仿真实验,仿真实验在matlab软件上进行。其仿真实验条件:模拟发射阵元发射的超声波信号的信号频率为40KHz,弧形半径R=10cm,接收阵元噪声为加性高斯白噪声。风速扫描范围为0~60m/s,步长为0.1m/s。风向角扫描范围为0~359°,步长为1度。快拍数为1000,在信噪比SNR=10dB时,分别估计以下随机的五组风速风向参数:(1)V=0m/s theta=0°;(2)V=5.1m/s theta=45°;(3)V=21.3m/s theta=135°;(4)V=51.7m/s theta=315°;(5)V=60m/s theta=359°。
图3为本发明实施例V=0m/s theta=0°谱峰示意图;图4为本发明实施例V=5.1m/s theta=45°谱峰示意图;图5为本发明实施例V=21.3m/s theta=135°谱峰图示意图;图6为本发明实施例V=51.7m/s theta=315°谱峰图示意图;图7为本发明实施例V=60m/s theta=359°谱峰示意图,图8为本发明实施例无风时测量信息仿真示意图。
如图3-7所示,第一组的仿真结果:V=0.1m/s theta=1°。
第二组的仿真结果:V=5.1m/s theta=45°。
第三组的仿真结果:V=21.3m/s theta=135°。
第四组的仿真结果:V=51.7m/s theta=315°。
第五组的仿真结果:V=60m/s theta=359°。
从以上五组谱峰图及仿真结果来看,本发明提供的方法可以实现全风角度和一定范围风速的测量,所以利用波束形成算法来进行测风是可行的。但在无风时,风速和风向会稍有偏差,而在风速和风向都取为最大值时,几乎可以实现无偏差测量。下面来讨论在无风时的测量效果。
当无风时,即V=0m/s theta=0°时,在信噪比SNR=10dB时,做200次独立仿真实验。仿真得到的风速信息和风向信息如图8所示,其中,纵坐标表示每次仿真时的风速V和经一定的数学公式即:y=cos(0.5theta)处理过的风向信息,也就是将360°的角度范围在半个周期的余弦函数图像中表示。理想情况下,风速信息应该是在y=0处的一条直线,风向信息应是在y=1处的一条直线,但由图8可知,风速和风向都有偏差。由于我们在进行风速和风向遍历时,所设置的步长分别为0.1m/s和1°,所以假设能接受的风速误差和风向误差也分别是0.1m/s和1°,则由图8可知,在200次的独立实验中,风速有19次的结果是0.2m/s,超过了误差接受范围,可认为风速测量成功率是90.5%。风向的测量中有6次的误差超过了1°,可认为风向测量成功率为97%。总体来说,在无风时的测量,还算较为准确。也从侧面说明了本发明提供的方法用来测风的可行性。
在可行性实验的基础上,验证在不同信噪比的条件下仿真结果的离散程度。实验假设:信噪比的取值范围为SNR=-5~10dB,步长为1dB。每个信噪比下做200次蒙特卡洛实验。分别估计三组参数:
(1)V=5.1m/s thet
一种测量风速和风向的方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0