







专利摘要
本发明涉及一种基于滑模变结构的IST控制系统及其控制方法。首先,采集系统线路的电压电流,对比目标电压电流,经过计算模块(DSP)计算,确定IST所需投入的有功功率和无功功率;然后,通过滑模变控制模块,对照ST当前所处的位置,计算ST所需要投入到的位置,并控制ST的投切抽头,投到目标位置;最后,ST投切到目标位置后,控制模块计算剩下的所需UPFC投切的容量,并采用PI控制UPFC实时跟踪投入。本发明实现了对IST的闭环控制,通过滑模变控制离散变化的ST可以更快更准确的到达补偿点,然后采用PI控制的UPFC实时跟踪控制,不仅可以极大的发挥ST大容量低价格的优势,还可以实现对潮流的快速精确控制。
说明书
技术领域
本发明涉及一种基于滑模变结构的控制系统及其控制方法,尤其是涉及一种基于滑模变结构的IST控制系统及其控制方法。
背景技术
滑模变结构控制是在上世纪六十年代初由前苏联Emelyanov、Utkin和Itkin等学者提出,它是一种非线性控制方法。
滑模变结构控制本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性.这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。
在系统控制过程中,控制器根据系统当时状态,以跃变方式有目的地不断变换,迫使系统按预定的“滑动模态”的状态轨迹运动。变结构是通过切换函数实现的,特别要指出的是,通常要求切换面上存在滑动模态区,故变结构控制又常被称为滑动模态控制。设计变结构控制系统基本可分为两步:
(1)确定切换函数S(x),即开关面,使它所确定的滑动模态渐近稳定且有良好的品质,开关面代表了系统的理想动态特性。
(2)设计滑模控制器,使到达条件得到满足,从而使趋近运动(非滑动模态)于有限时间到达开关面,并且在趋近的过程中快速、抖振小。
滑模变结构控制具有稳定范围宽、动态响应快、对参数变化和扰动不敏感等优点。研究对象涉及到离散系统、分布参数系统、非线性大系统等众多复杂系统。
滑模控制也有其缺点,如当状态轨迹到达滑动模态面后,难以严格沿着滑动模态面向平衡点滑动,而是在其两侧来回穿越地趋近平衡点,从而产生抖振。
滑模变结构控制是采用一个切换函数作为决策规则来实现闭环系统结构的切换,利用可变控制,在有限时间内将系统状态驱动并维持在切换函数所确定的一个超平面上,如图1表示系统在滑模面上的运动。
迄今为止,已有多个控制系统采用了滑模变结构控制策略,取得了良好的效果。这里列出部分典型的应用。
1、电机的应用
这是滑模变结构一直以来最主要的一个应用领域,由于无论直流电机、同步电机和感应电机都存在严重的非线性,十分适合滑模变结构的应用。
2、开关变换器的应用
开关变换器是一个强非线性系统,滑模变结构的应用可解决开关变换器不易稳定、对扰动抑制能力差等问题。根据开关工作周期,动态地对滑模误差进行修正,补偿了控制量的大小,有利于近似地保证系统沿着切换面运动,并可以减少系统稳态误差,达到削弱抖振的目的。
3、机器人控制的应用
机器人近年来成为滑模变结构主要应用方面之一。机器人是典型的非线性系统,存在各种不可预见的外部干扰,有大量关于此方面的研究。可侧通过设计两个滑模面,实现了带有弹性力臂的双关节机器人的研究。
4、飞行器控制的应用
滑模变结构控制本身的优良性能,适合飞行器的运动控制。而且在导弹制导中发展神速。
目前基于ST的控制主要是开环的,鲜有对其进行闭环控制的。这种控制方式反映速度较慢,在抽头投切过程中有可能造成ST抽头的投切针振荡,达不到正常补偿的目标。本发明采用滑模变控制的ST辅以UPFC达到闭环控制的目的,可以对系统潮流得到极好的补偿。
发明内容
本发明的上述技术问题主要是通过下述技术方案得以解决的:
一种基于滑模变结构的IST控制系统,其特征在于,包括连接在系统送端和受端之间的SEN变压器和统一潮流控制器、分别设置在系统送端和受端的两组用于测量电压和电流的PT采集装置以及CT采集装置、与两组PT采集装置以及CT采集装置连接的DSP及扩展模块、与DSP及扩展模块连接用于控制SEN变压器的滑模变控制模块、以及与DSP及扩展模块连接用于控制统一潮流控制器的PI控制器。
这里SEN变压器以下简称ST,统一潮流控制器以下简称UPFC;这里的IST指采用SEN变压器加上统一潮流控制器的混和控制方法,称为改进型SEN变压器。
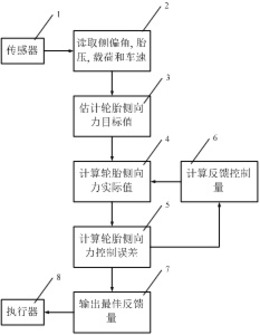
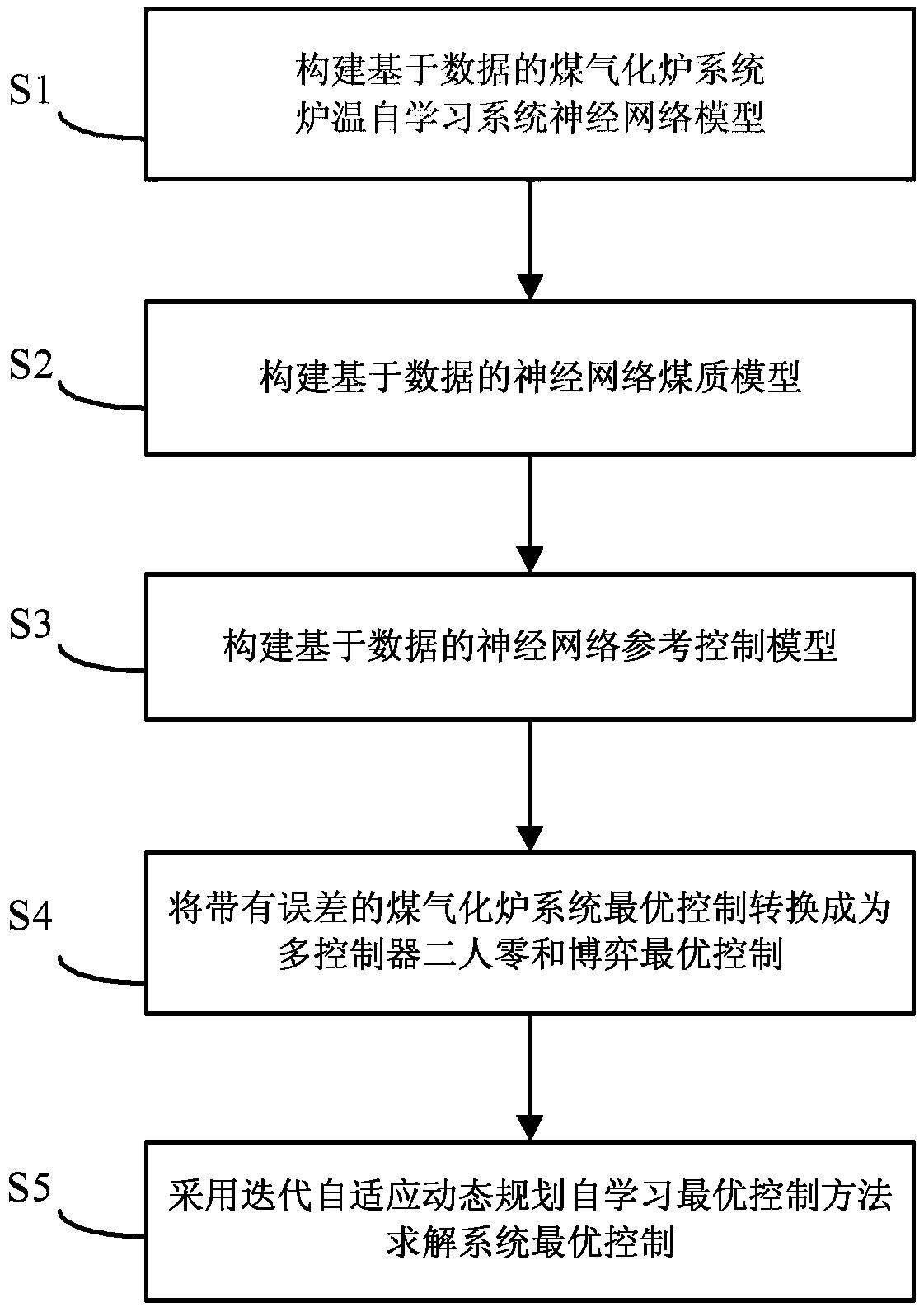
在上述的一种基于滑模变结构的IST控制方法,其特征在于,包括以下步骤:
步骤1,两组PT采集装置以及CT采集装置采集系统线路的电压电流,对比目标电压电流,经过DSP及扩展模块计算,确定IST所需投入的有功功率和无功功率;
步骤2,通过滑模变控制模块,对照ST当前所处的位置,计算ST所需要投入到的位置,并控制ST的投切抽头,投到目标位置;
步骤3,ST投切到目标位置后,滑模变控制模块计算剩下的所需UPFC投切的容量,并采用PI控制器控制UPFC实时跟踪投入。
因此,本发明具有如下优点:1.闭环控制,可以极大的发挥ST和UPFC在系统潮流补偿中的作用;2.响应速度快,可以极快的得到ST和UPFC各自所需补偿到的目标点并快速投入到目标位置;3.补偿容量大经济性好,可以极大的发挥ST补偿容量大但价格低廉的经济优势;4.控制效果好,对离散变化的ST,滑模变可以更好的符合它的变化趋势,并给予准确控制。
附图说明
图1是负载系统在滑模面上的运动的示意图。
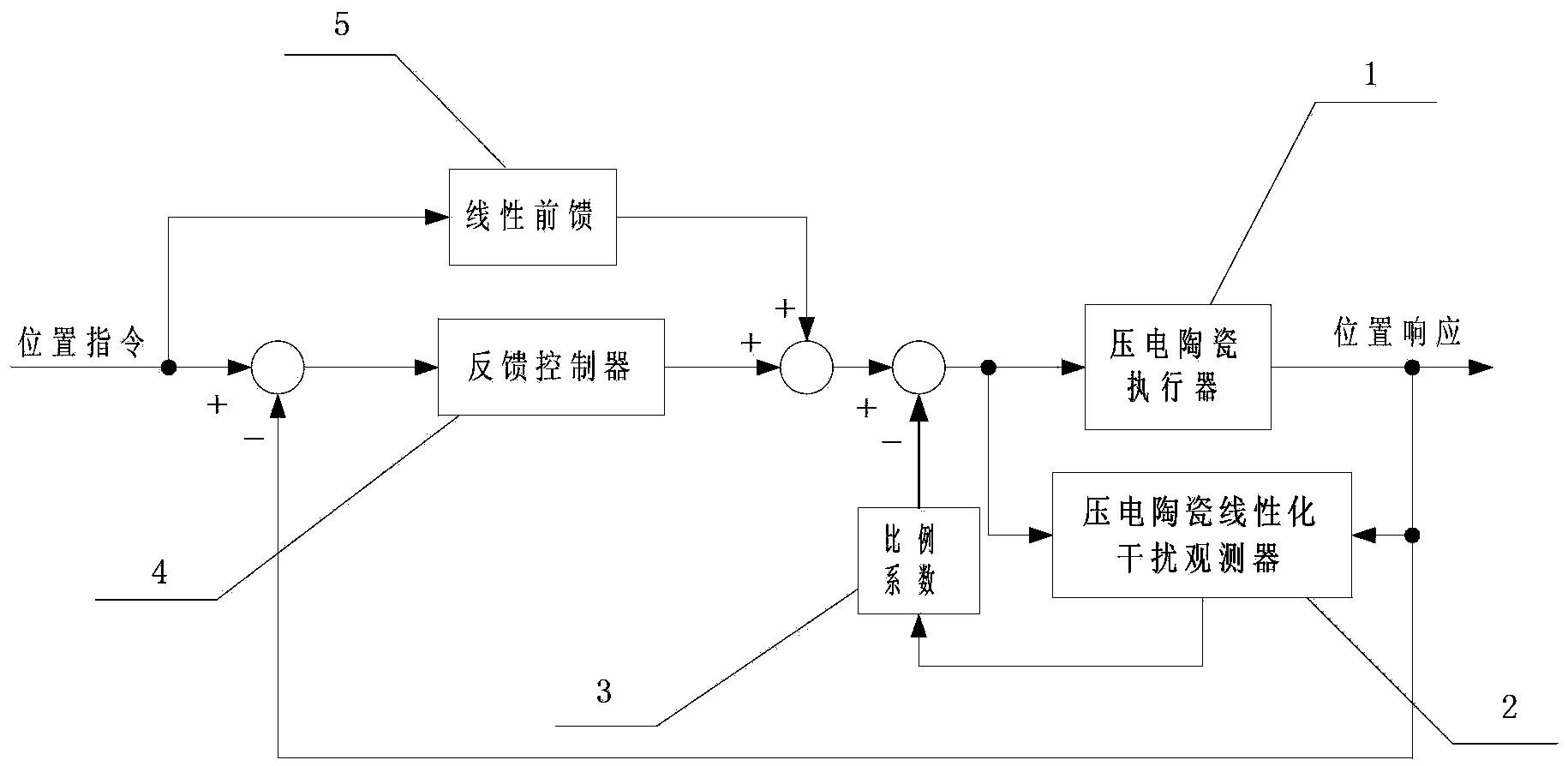
图2是本发明的一种结构及控制器原理示意图。
图3是本发明采用的ST-UPFC控制系统在滑模面上的运动示意图。
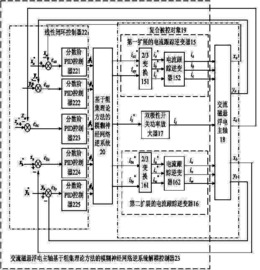
图4是本发明的硬件结构示意图。
图5是与图4对应的控制原理示意图。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
实施例:
首先有必要介绍一下滑模变结构控制的定义及存在性。
设一非线性系统
其中,x∈Rn,u∈Rm,t∈R
需要确定滑模函数向量S(x),S∈Rm,并寻求变结构控制
这里 (i=1,2,…,m),使得切换面Si(x)=0以外的相轨迹于有限时间内进入切换面,这样的控制系统称为滑模变结构控制系统。
系统主要有两个设计目标:选择滑模面Si(x),求取控制 滑模变结构控制存在的条件:
或
即切换函数要满足可微和过原点的要求。这时,滑模变结构控制存在且收敛。
然后介绍本发明的混合式IST控制方法的原理。
如图2所示, 为系统送端电压, 为系统受端电压,XS,XL,Xr依次为系统送端电抗、线路电抗和系统受端电抗, 和 为系统等效送端电压和等效受端电压, 为ST串联部分补偿系统的电压, 为UPFC串联部分补偿系统的电压。控制部分通过采集系统线路的电压和电流,然后比较目标电压和电流,确定ST和UPFC各自所需投入补偿的有功功率和无功功率。ST和UPFC都是调节系统潮流的装置,但是,由于ST和UPFC分别有各自的优点和缺点,此处把两者结合组成IST(Improved ST)控制系统的潮流可以弥补两者的不足达到最优的调节效果,如响应速度快、调节容量大、成本低、调节更精确、抑制抽头动作振荡等。
需要注意的是,两者有不同的工作原理和运行方式,不能用同一种控制方法同时控制,必须要寻找一种有效的控制手段实现两者的协同工作。
接下来介绍本发明的控制方法流程:
1.选择滑模面。
由于ST的控制目标有两个,一个是线路传输的有功P,一个为无功Q,实际控制时也为P、Q的分步控制,在此系统中滑模面有两个:
其中P(x)为线路中的即时有功,Q(x)为线路中的即时无功,Pref和Qref分别为目标传输功率。
2.判定收敛性。
对SP(x)=P(x)-Pref有
当SP(x)>0时,
P(x)-Pref>0,P(x)>Pref
即P(x)超过了预定目标值,控制系统会使P(x)在下一时刻减小,即
故
且满足
当SP(x)<0时,
P(x)-Pref<0,P(x)<Pref
即P(x)小于预定目标值,控制系统会使P(x)在下一时刻增加,即
故
且满足
由式(6),(7)可知SP(x)满足收敛条件,同理,SQ(x)也满足收敛条件。
3.ST变结构控制的离散化。
由于ST的控制是离散的,并不能保证滑模面SP(x)、SQ(x)无限趋近于零,而且在实际的控制中,也不可能保证控制装置到达零误差,因此实际的目标区域是一个沿着切换面的邻域δ,δ>0,当SP(k),SQ(k)∈(-δ,+δ)时,可以认为目标到预定值,系统到达稳定状态。
因此ST实际的变结构控制为:
其中,
具体的控制结构如下:
切换到与当前补偿点最近的P减小的补偿点
切换到与当前补偿点最近的P增加的补偿点
切换到与当前补偿点最近的Q减小的补偿点
切换到与当前补偿点最近的Q增加的补偿点
在实际控制中,每次补偿点切换完成,都优先分析SP(k),其次分析SQ(k),只有当系统先进入滑模面SP(k)后,才会再向滑模面SQ(k)运动,当两个切换面都到达时,表示补偿稳定。
4.UPFC与ST的控制
在ST变结构控制的基础上,UPFC采用PI控制,在ST动作同时,UPFC始终输出一个朝向目标功率的目标电压向量,该向量以ST输出电压和终点为始点,以目标功率对应的线路送端电压向量终点为终点,该目标电压向量随着ST输出电压的变化而快速变化。
结合UPFC控制,IST控制策略可表示为:
U(k,x)=uP,Q(k)+uupfc(x) (式10)
其中uupfc(x)是UPFC的控制,属于连续控制系统,并且不随滑模面Si(x)的情况变化而是采用PI控制方式。
如图3所示为ST-UPFC控制系统在滑模面上的运动示意图,图中两条虚线分别表示切换面SP(x)=0和SQ(x)=0,分别平行于两条虚线的四条直线表示了沿着切换面的邻域边界。ST控制系统使滑模面运动进入切换面邻域内,并且首先到达以SP(x)=0为中心线的邻域内,再向SQ(x)=0邻域内逼近。而UPFC的控制始终配合ST的输出,使目标功率最接近目标值。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
一种基于滑模变结构的IST控制系统及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0