










专利摘要
本发明公开了一种考虑通信时滞的风力机模拟器转动惯量补偿策略的滤波参数选取方法,首先确定风力机模拟器系统的基本参数,之后确定一阶数字滤波器的滤波参数;并判断此时模拟器系统是否满足稳定性条件;然后根据判断的结果对一阶数字滤波器的滤波参数进行自增;滤波参数选取结束后,转动惯量补偿有效,风力机模拟器系统能够稳定运行。本发明解决了含通信时滞的风力机模拟器系统中转动惯量补偿策略的一阶低通滤波器参数选取问题,通过判断含通信时滞的风力机模拟器的系统稳定性来确定风力机模拟器转动惯量补偿策略中一阶低通滤波器的滤波参数选取,使WTS能安全稳定地模拟大转动惯量风力机的机械动态。
权利要求
1.一种基于风力机模拟器转动惯量补偿策略的滤波参数选取方法,其特征在于,包含以下步骤:
步骤1、确定风力机模拟器系统的基本参数,包括通信时滞步长k
步骤2、确定一阶数字滤波器的滤波参数α;
步骤3、根据步骤1和步骤2确定的参数,判断此时模拟器系统是否满足稳定性条件;如果满足则执行步骤5,否则执行步骤4;
步骤4、对一阶数字滤波器的滤波参数α进行自增,具体为:α=α+Δα,Δα取0.01,之后返回步骤3;
步骤5、滤波参数选取结束,转动惯量补偿有效,风力机模拟器系统能够稳定运行。
2.根据权利要求1所述的基于风力机模拟器转动惯量补偿策略的滤波参数选取方法,其特征在于,步骤1中通信时滞步长k
k
式中,τ是通信时滞时长,T是系统采样时长。
3.根据权利要求1所述的基于风力机模拟器转动惯量补偿策略的滤波参数选取方法,其特征在于,步骤2中一阶数字滤波器的滤波参数α的初值为0.5。
4.根据权利要求1所述的基于风力机模拟器转动惯量补偿策略的滤波参数选取方法,其特征在于,步骤3中判断模拟器系统是否满足稳定性条件具体包括以下步骤:
步骤3-1、构建方程组
式中,r是极径,θ是极角;
步骤3-2、对方程组进行初始化,具体是:将极角θ设置为0;判断此时通信时滞步长k
步骤3-3、判断J
步骤3-4、极角θ进行自增,具体为:θ=θ+Δθ,Δθ取值为0.01;
步骤3-5、根据下述公式计算极径r,
步骤3-6、对r值进行校验,校验公式为:
式中ε是校验精度,取值为1×10
步骤3-7、判断极径r是否小于1,若是则执行步骤3-8,否则直接执行步骤3-9;
步骤3-8、判断极角θ是否大于2π,若大于2π,则风力机模拟器系统的稳定性条件成立,否则返回执行步骤3-4;
步骤3-9、风力机模拟器系统的稳定性条件不成立。
说明书
技术领域
本发明属于风力机模拟器领域,特别是一种基于风力机模拟器转动惯量补偿策略中低通滤波器参数的选取方法。
背景技术
开展风力机试验的目的将助力风轮叶片气动设计、风力机伺服控制、电气变流技术等的深入研究,对风力发电系统的开发、优化和现场应用具有重要的意义。
在实地开展风力机试验的代价十分高昂且耗费时间,故风力机模拟器(WindTurbine Simulator,WTS)已经成为风力机试验的重要测试设备。
由于风力机模拟器的物理转动惯量远小于实际风力机的转动惯量,模拟器须采取转动惯量补偿策略以还原实际风力机的慢机械动态特性。传统转动惯量补偿策略中一阶低通滤波器的参数选择对于模拟性能的优劣具有很大影响。
当模拟大转动惯量风力机时,应用一阶滤波器的转动惯量补偿策略由于通信时滞而存在失效现象,滤波器参数选取不合适一方面会影响模拟效果(参数选取过大),另一方面可能易造成系统失稳崩溃(参数选取过小)。
基于上述情况,目前迫切需要一种风轮模拟器转动惯量补偿策略中滤波器的参数选取方法,使得风力机模拟器能够稳定可靠地模拟大转动惯量风机的机械动态。
发明内容
本发明的目的在于提供一种基于风力机模拟器转动惯量补偿策略的滤波参数选取方法。
实现本发明目的的技术解决方案为:一种基于风力机模拟器转动惯量补偿策略的滤波参数选取方法,包含以下步骤:
步骤1、确定风力机模拟器系统的基本参数,包括通信时滞步长k0,转动惯量补偿倍数Jt/Js,其中Jt为风力机转动惯量,Js为风力机模拟器转动惯量;时滞步长k0的确定公式为:
k0=[τ/T]
式中,τ是通信时滞时长,T是系统采样时长。
步骤2、确定一阶数字滤波器的滤波参数α;所述一阶数字滤波器的滤波参数α的初值为0.5。
步骤3、根据步骤1和步骤2确定的参数,判断此时模拟器系统是否满足稳定性条件;如果满足则执行步骤5,否则执行步骤4;判断模拟器系统是否满足稳定性条件具体包括以下步骤:
步骤3-1、构建方程组
式中,r是极径,θ是极角;
步骤3-2、对方程组进行初始化,具体是:将极角θ设置为0;判断此时时滞步长k0是否为奇数,若为奇数,则执行步骤3-3;否则执行步骤3-4;
步骤3-3、判断Jt/Js<2/(1-α)是否满足,若满足则执行步骤3-4,若不满足则执行步骤3-9;
步骤3-4、极角θ进行自增,具体为:θ=θ+Δθ,Δθ取值为0.01;
步骤3-5、根据下述公式计算极径r,
步骤3-6、对r值进行校验,校验公式为:
式中ε是校验精度,取值为1×10
步骤3-7、判断极径r是否小于1,若是则执行步骤3-8,否则直接执行步骤3-9;
步骤3-8、判断极角θ是否大于2π,若大于2π,则风力机模拟器系统的稳定性条件成立,否则返回执行步骤3-4;
步骤3-9、风力机模拟器系统的稳定性条件不成立。
步骤4、对一阶数字滤波器的滤波参数α进行自增,具体为:α=α+Δα,Δα取0.01,之后返回步骤3;
步骤5、滤波参数选取结束,转动惯量补偿有效,风力机模拟器系统能够稳定运行。
本发明与现有技术相比,其显著优点为:1)本发明首次提出了一个考虑通信时滞的一阶滤波器参数选取方法,解决了因一阶滤波器参数选取不当而造成的模拟器失稳问题;2)本发明公开了一阶滤波器参数选取的详细步骤,简单易行且能够保证风力机模拟器能够稳定运行,使WTS能模拟更大转动惯量的风力机模型,并且能更加有效和方便地复现实际风力机的慢动态。
附图说明
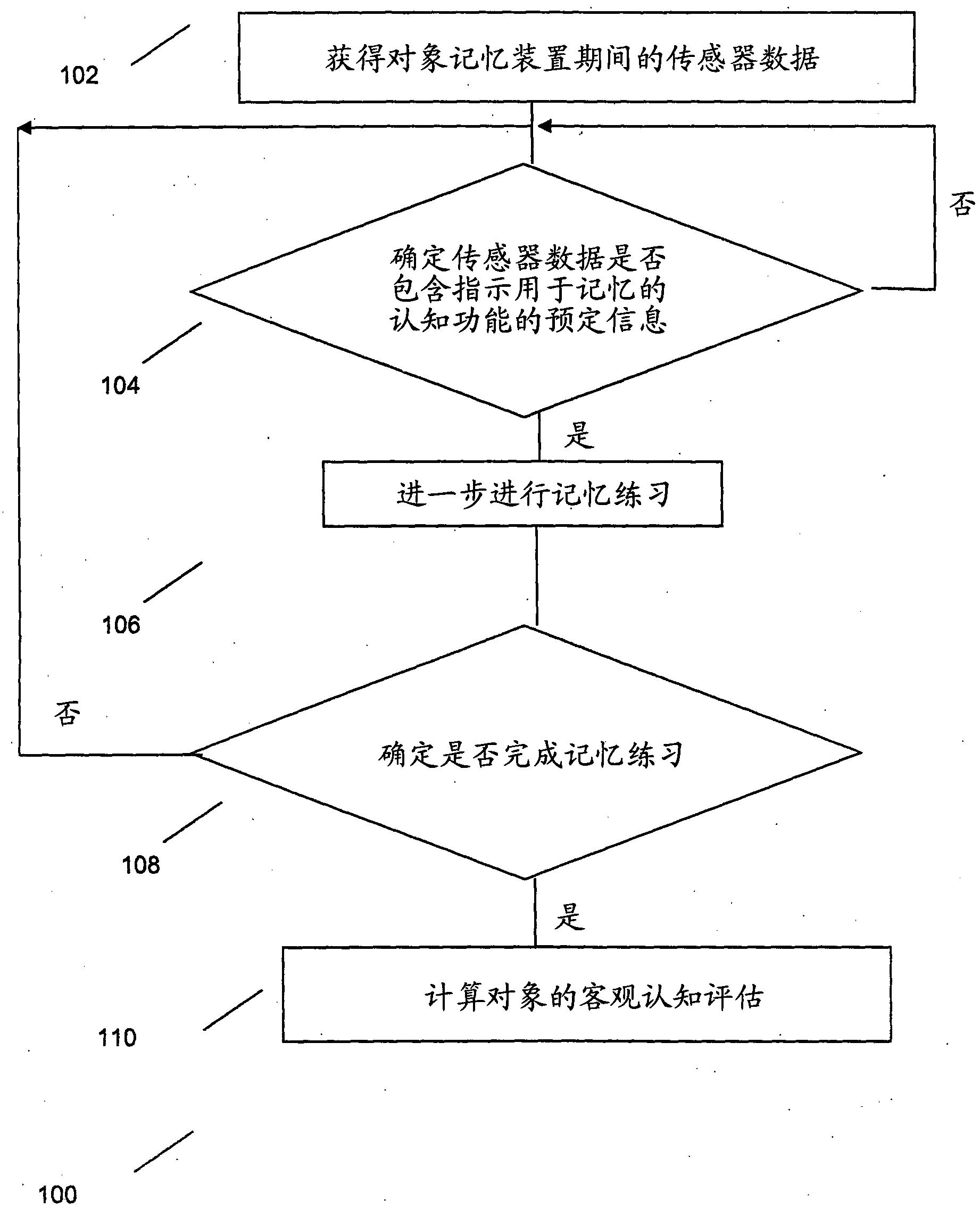
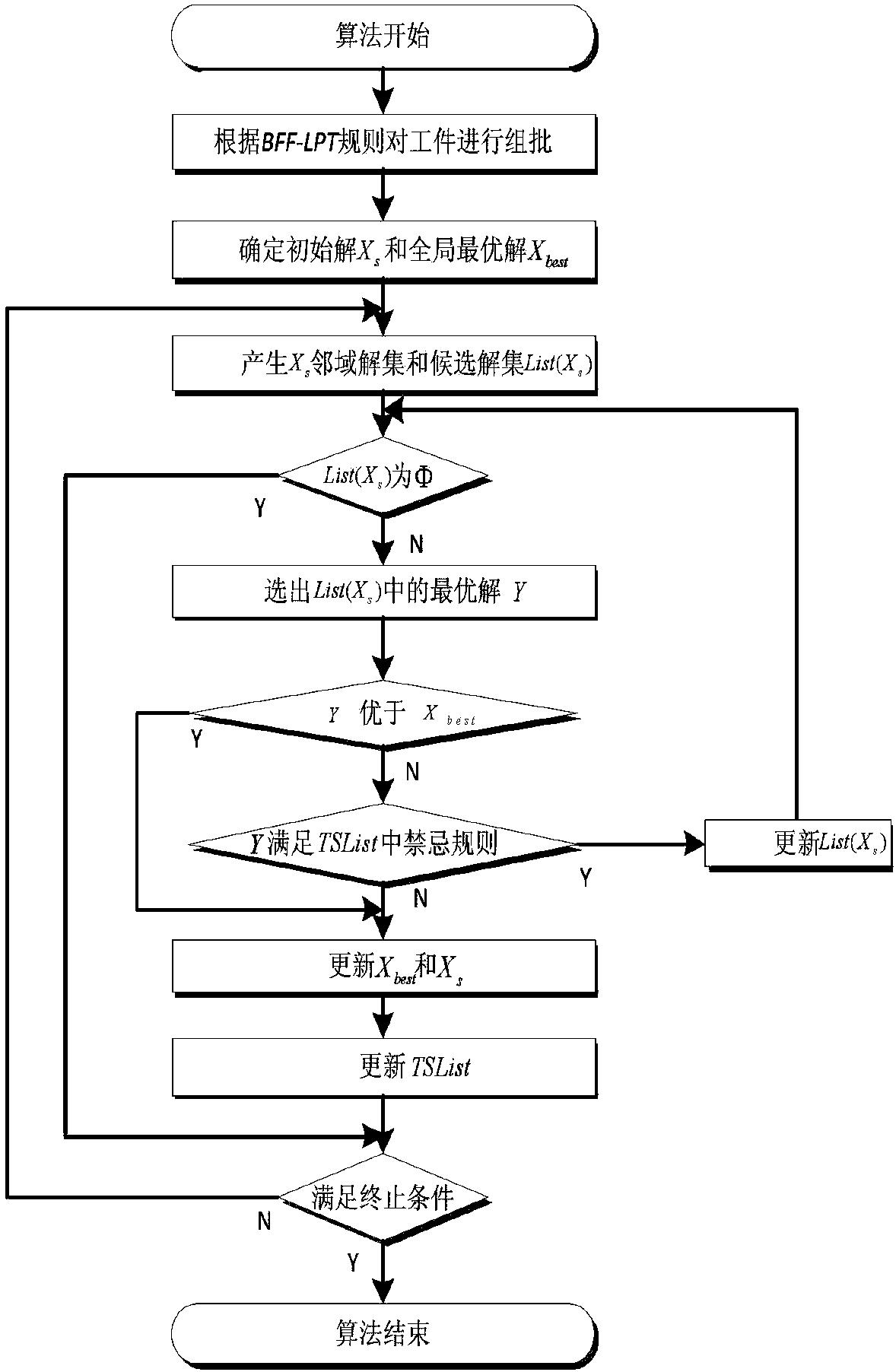
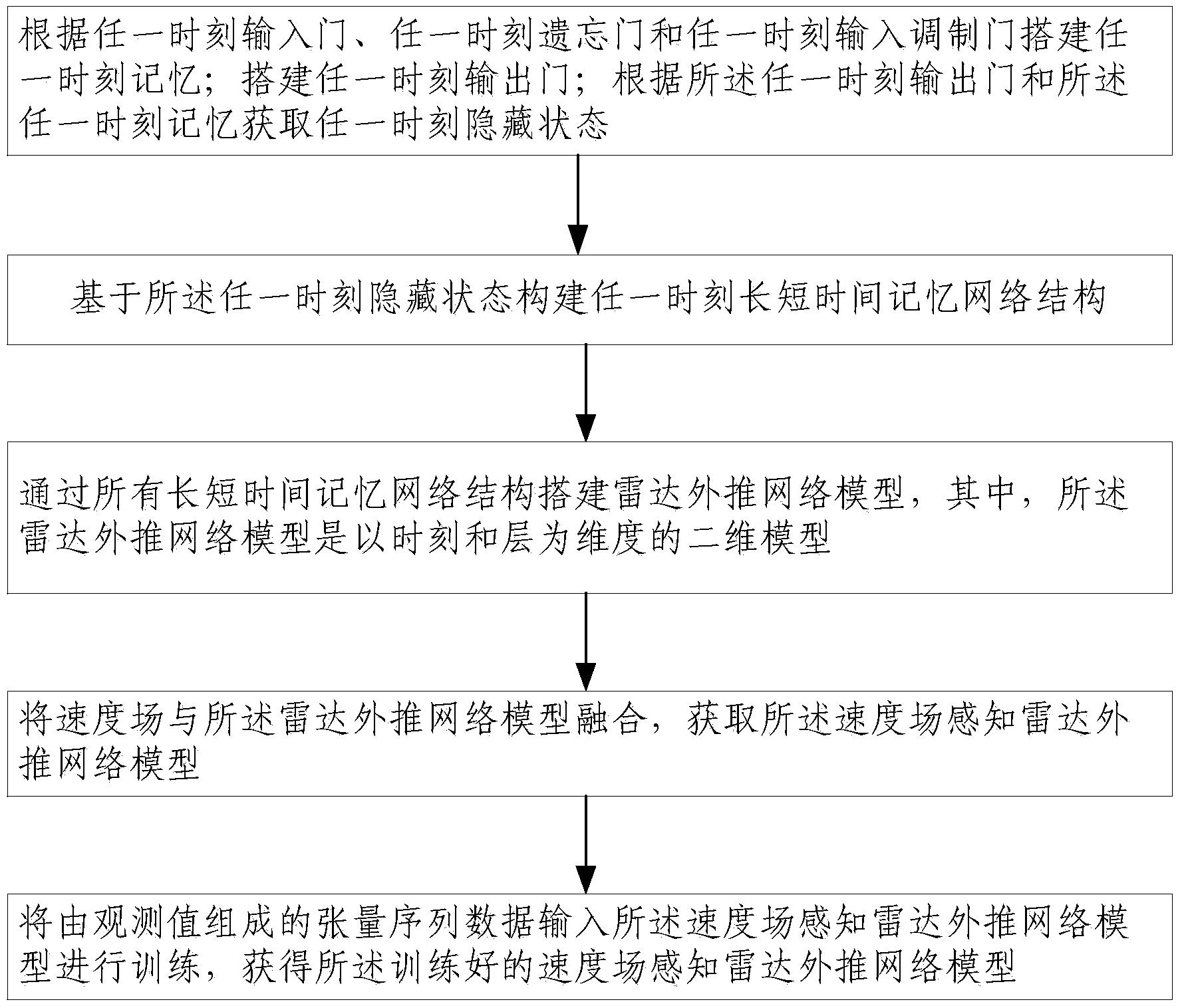
图1为本发明的风力机模拟器中一阶低通滤波器参数选取方法的流程图。
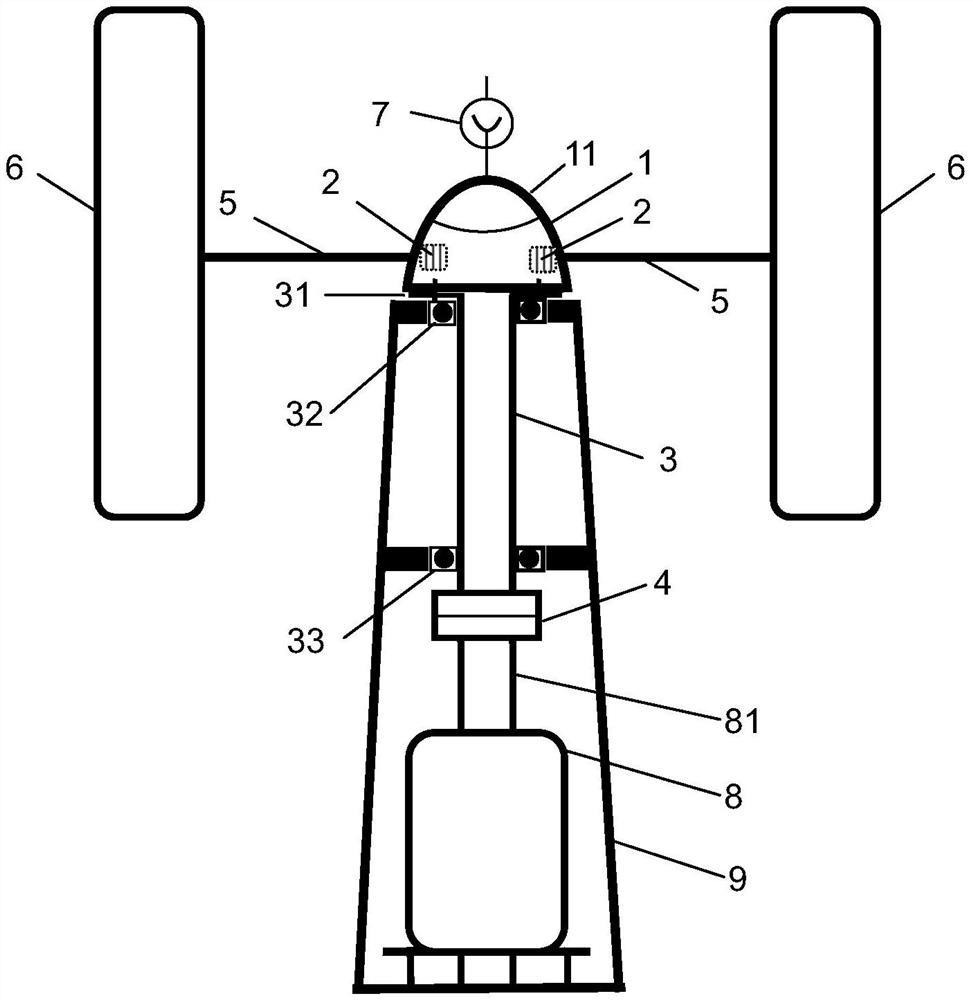
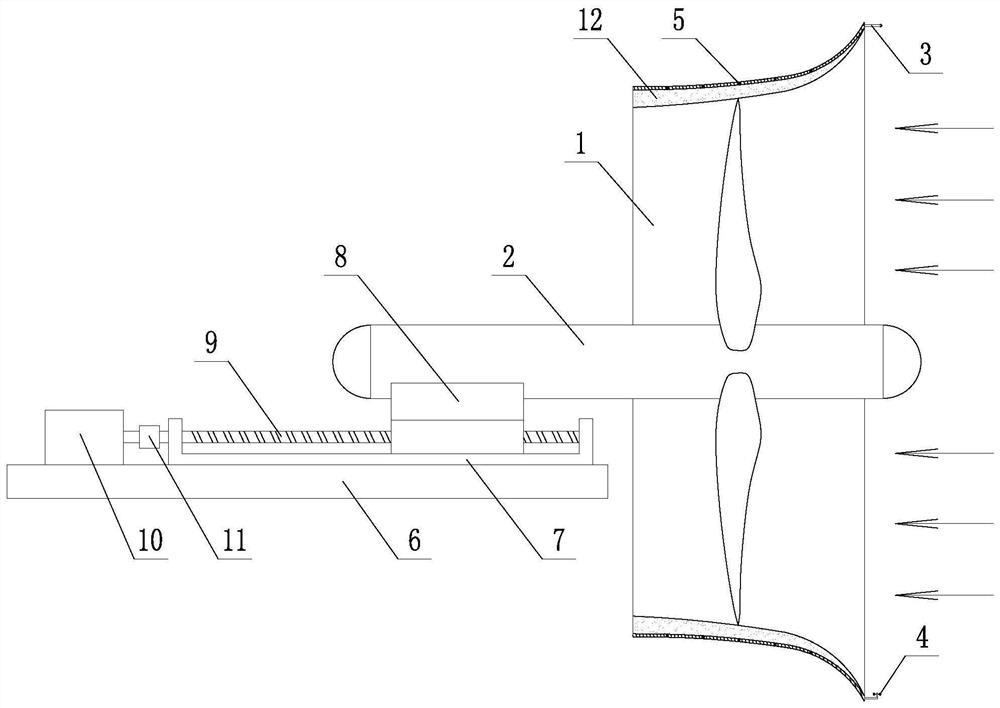
图2为本发明的具体实施例的模拟器结构图及滤波器设置示意图。
图3为对比例I的轨迹图,其中图(a)是应用传统策略的模拟器转速轨迹图,图(b)是应用传统策略的模拟器转矩轨迹图。
图4为对比例II的轨迹图,图(a)是应用本发明后的模拟器转速轨迹图,图(b)是应用本发明后的模拟器转矩轨迹图。
图5为实施例III中应用本发明所选取的滤波器参数后在湍流风速下WTS稳定运行示意图。
具体实施方式
本发明公开了一种基于风力机模拟器转动惯量补偿策略的滤波参数选取方法,包含以下步骤:
步骤1、确定风力机模拟器系统的基本参数,包括通信时滞步长k0,转动惯量补偿倍数Jt/Js,其中Jt为风力机转动惯量,Js为风力机模拟器转动惯量;时滞步长k0的确定公式为:
k0=[τ/T]
式中,τ是通信时滞时长,T是系统采样时长。
步骤2、确定一阶数字滤波器的滤波参数α;所述一阶数字滤波器的滤波参数α的初值为0.5。
步骤3、根据步骤1和步骤2确定的参数,判断此时模拟器系统是否满足稳定性条件;如果满足则执行步骤5,否则执行步骤4;
判断模拟器系统是否满足稳定性条件具体包括以下步骤:
步骤3-1、构建方程组
式中,r是极径,θ是极角;
步骤3-2、对方程组进行初始化,具体是:将极角θ设置为0;判断此时时滞步长k0是否为奇数,若为奇数,则执行步骤3-3;否则执行步骤3-4;
步骤3-3、判断Jt/Js<2/(1-α)是否满足,若满足则执行步骤3-4,若不满足则执行步骤3-9;
步骤3-4、极角θ进行自增,具体为:θ=θ+Δθ,Δθ取值为0.01;
步骤3-5、根据下述公式计算极径r,
步骤3-6、对r值进行校验,校验公式为:
式中ε是校验精度,取值为1×10
步骤3-7、判断极径r是否小于1,若是则执行步骤3-8,否则直接执行步骤3-9;
步骤3-8、判断极角θ是否大于2π,若大于2π,则风力机模拟器系统的稳定性条件成立,否则返回执行步骤3-4;
步骤3-9、风力机模拟器系统的稳定性条件不成立。
步骤4、对一阶数字滤波器的滤波参数α进行自增,具体为:α=α+Δα,Δα取0.01,之后返回步骤3;
步骤5、滤波参数选取结束,转动惯量补偿有效,风力机模拟器系统能够稳定运行。
下面结合实施例对本发明作进一步详细的描述:
WTS实验平台建立在实验室内,其主要的构成部分如图2有:1)一台三相异步电动机与一台永磁同步发电机构建的对拖系统,2)1024脉冲/转的旋转编码器用于转速测量,3)基于VACON变频器的电机驱动系统,4)基于Beckhoff PLC的实时数字控制系统(real-timedigital contro lsystem,RTDCS),一阶低通数字滤波器处于该系统中,5)Profibus-DP现场总线的通讯网络。
RTDCS根据包括模拟的湍流风速,气动转矩和补偿转矩计算电动机的转矩参考值,一阶低通滤波器在补偿转矩的计算回路中。然后将滤波后的转矩参考值通过Profibus-DP总线传输到电动机驱动系统。通过工业驱动技术,电机的运行转矩得以精确控制去跟随变化的转矩参考值。
风力机模拟器平台参数如表1所示。电磁转矩计算公式为:
Tg=kopt·ωg
这是风力发电机一种广泛应用的最大功率点跟踪(maximumpowerpointtracking,MPPT)控制方法,被称为最优转矩控制,其中kopt是最优转矩增益((Nm/(rad/s)
表1 WTS实验平台参数
对比例I:首先,令WTS的转动惯量补偿倍数为Jt/Js=3,选取一阶滤波器参数α=0.5。此时风力机模拟器在阶跃风速下运行的转速轨迹分别如图3中的(a)所示,因为通信时滞,一阶滤波器存在失效现象(参数选取不当),使得风力机模拟器出现补偿转矩振荡的失稳现象,如图3中的(b)所示。
对比例II:通信时滞的存在导致一阶滤波器失效并引发模拟器系统失稳,故需要对其重新进行参数选取,保证风力机模拟器能够安全稳定运行。
确定通信时滞τ约为60ms,即取得时滞步长k0=6,转动惯量补偿倍数Jt/Js=3,一阶数字滤波器的滤波参数选取过程如下,并可参照图1的具体流程图:
1)选择一阶数字滤波器的滤波参数α初始值0.5;
2)针对给定的参数k0,Jt/Js以及滤波器参数α,判断此时风力机模拟器系统的是否稳定。具体判断过程如下,并可参照图1的判断流程图。
2-1)初始化极角θ=0,判断此时时滞步长k0是否为奇数。若为奇数,则直接执行步骤2-2;若k0为偶数,则判断Jt/Js<2/(1-α)是否满足。若满足则执行步骤2-2,否则直接进入步骤2-6;
2-2)θ自增:θ=θ+Δθ,Δθ可取0.01;
2-3)根据式(ii)计算此时θ对应的极径r,对极径值进行校验,校验公式为:
式中ε是校验精度,可取1×10
2-4)判断极径r是否小于1,若是则执行步骤2-5,否则直接执行步骤2-6;
2-5)判断θ是否大于2π,若大于2π,则风力机模拟器系统的稳定性条件成立,否则返回执行步骤2-2;
2-6)风力机模拟器系统的稳定性条件不成立;
3)若步骤2)中稳定性条件不成立,一阶数字滤波器的滤波参数α自增,α=α+Δα,Δα取0.01;
4)若步骤2)中稳定性条件成立,则循环结束。经上述循环步骤后取得最佳的滤波器系数α=0.87;
5)应用有上述步骤获得的一阶滤波器系数后,风力机模拟器在阶跃风速下转速运行轨迹如图4中的(a)所示。从图中可见,风力机模拟器能够稳定运行,补偿转矩收敛稳定,如图4中的(b)所示,不存在原先的失稳振荡现象。这说明了本发明所提出的滤波器参数选取能够解决因一阶滤波器参数选取不当而造成的WTS失稳问题。
实施例III:最后,对湍流风速输入下验证WTS在不同转动惯量补偿倍数下的稳定性。实验结果如图5所示,利用本发明中设计的一阶滤波器参数选取规则,WTS能够稳定且准确的模拟实际风力机的机械动态。
由上可知,本发明的方法简单易行且能够保证风力机模拟器能够稳定运行,使WTS能模拟更大转动惯量的风力机模型,并且能更加有效和方便地复现实际风力机的慢动态。
基于风力机模拟器转动惯量补偿策略的滤波参数选取方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0