










专利摘要
本发明公开了一种二维微动平台的装置,包括电磁驱动部分、笼式结构部分和基座。电磁驱动部分,包括线圈及其固定部件:线圈骨架和支撑架,和磁钢及其固定部件:方板。笼式结构部分,包括48根弹性钢丝、底座和平台,底座上表面与平台下表面均打孔与弹性钢丝配合并紧固。固定磁钢的方板用螺栓紧固在平台上;线圈及其固定部件、磁钢及其固定部件均为四套,对称的放置于笼式结构的前后左右。笼式结构部分的底座和电磁驱动部分的支撑架都固定在基座上。应用本发明,可以实现平台在平面任意方向上的无摩擦的微运动,平台上安装的样片与固定的触头之间可模拟界面间的二维往复运动轨迹,从而更有效的研究电接触中的平面微动过程。
权利要求
1.一种二维微动平台装置,其特征在于,平台可以实现在平面任意方向上的无摩擦微运动,该装置包括:电磁驱动部分、笼式结构部分和基座,其中,
电磁驱动部分,包括:产生磁力的线圈及其固定部件和受磁力的磁钢及其固定部件,线圈通电后产生的磁场对经磁化后的磁钢产生吸引或排斥力,使磁钢沿线圈的轴线方向运动,磁钢带动方板,进而带动平台运动;
笼式结构部分,包括:平台、底座和48根弹性钢丝,平台上方用于安装样片,平台下表面与底座上表面均打孔与弹性钢丝配合并紧固。
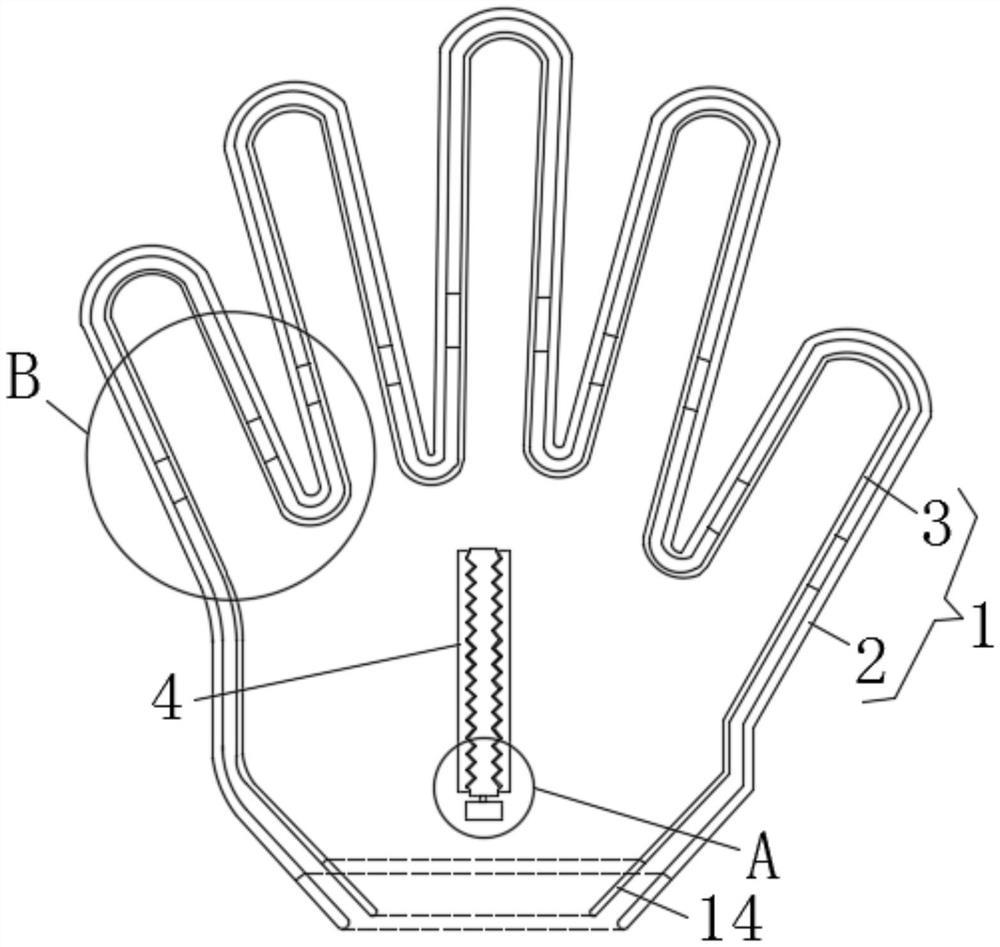
2.如权利要求1所述的装置,其特征在于,所述笼式结构部分,48根弹性钢丝呈圆形分布,平台受力后,在平面内各个方向的运动具有一致性;弹性钢丝在垂直方向上可以支撑平台及触头加载力,在横向受磁场力后依靠小挠度的变形实现平台的微动,撤去磁场后,靠本身弹性复位,实现小于200微米的往复微动。
3.如权利要求1所述的装置,其特征在于,所述电磁驱动部分在同一个方向有两个对称放置的线圈和磁钢,既增加了驱动力,同时克服了力与位移的非线性失真,实现此特征的有四套线圈和磁钢,其中,
磁钢是钕铁硼材料经磁化后的永磁体,同方向的一对线圈通正电后,一端线圈吸引与之邻近的磁钢,拉动平台,另一线圈排斥与其邻近的磁钢,推动平台,一推一拉同时工作使平台始终保持水平,输入负信号则平台反向运动。
说明书
技术领域
本发明涉及一种模拟电接触微动的技术,特别涉及到一种二维微动平台的装置。
背景技术
电触点是电气工程、电工技术和电信设备最重要的组成部分,为高效率输出能量提供了保证,因此提高电接触的可靠性非常必要。微动是影响电接触可靠性的一项非常重要的因素,它是指电触点界面间发生的小幅值的往复相对运动,在电子元件中,这样的微动的幅度从几个微米到200微米之间,是由外界振动或温度变化而产生。
微动将造成镀层金属受到磨损,引起基底材料外露造成腐蚀而使接触电阻升高,导致焦耳热增加,进而促使接触面氧化加速,进一步升高接触电阻,产生电连接故障。影响微动接触电阻的因素很多,包括微动频率、微动幅度、接触压力、环境、温度、触点形状以及电流作用等。此外,实际的电触点界面间的运动往往是平面二维运动,所以为了更好的研究微动对电接触的影响,提高电连接的可靠性,需要研制一套可以模拟连接器触点间二维微动的装置。
由于微动台的微动幅度要求从几十微米到200微米,对位移精度的要求很高,因此要求微动台应具有响应速度快和无摩擦的特点。
在已有的用于测接触电阻的微动台中,如中国申请号200810007402.9,公开号CN101236220A,名称为“一种测试微动接触电阻的系统和方法”的专利申请,所用的微动台,以及申请号为201110366086.6,申请公布号为CN103111990A,名称为“一维微动平台的运动机构”所描述的微动台,均只能在一维方向上产生微动,不能实现在平面任意方向上的往复运动,而电触点实际的运动大多数为二维的,所以无法很好的模拟电触点的微动过程。
在已有的二维微动台中,申请号为201210477575.3,公开号为CN1029626683A,名称为“二自由度平动并联高宽带微动平台”公开的是一种基于压电陶瓷驱动器和柔性铰链的微动平台,与本发明的驱动方式不同,压电陶瓷驱动需要较大的电压且驱动速度较慢。申请号为201410214646.X,公开号为CN103990998A,名称为“基于应力刚化原理的刚度频率可调二维微动平台”可以实现在平面上的微运动,但为两层结构,平台外面需要有子平台,机械结构相对复杂,而本发明为在一个平台上实现无摩擦的二维微动。而传统的机械传动式二维微动台,因机构中存在机械间隙、摩擦磨损、爬行现象等,无法达到很高的精度。
发明内容
有鉴于此,本发明的一个主要目的在于提供一种二维微动平台装置,使平台可以在平面方向上做任意轨迹的微运动。
为达到上述目的,本发明提供了一种二维微动平台装置,该装置包括:电磁驱动部分、笼式结构部分和基座,其中,
电磁驱动部分,用于产生电磁驱动力,最终对平台产生推力或者拉力;
笼式结构部分,用于产生微位移并支撑平台;
基座,用于支撑并固定电磁驱动部分和笼式结构部分。
较佳地,所述电磁驱动部分:进一步包括产生磁力的线圈及其固定部件和感受磁力的磁钢及其固定部件,其中,
线圈及其固定部件,用于通电后产生一定大小和方向的磁场,该磁场吸引或排斥经磁化后的磁钢,其中线圈缠绕在线圈骨架上,线圈骨架固定在支撑架上;
磁钢及其固定部件,用于将驱动力传递至笼式结构部分,使平台运动,磁钢受线圈产生磁场的吸引或排斥后,沿线圈轴向移动,磁钢与方板的圆孔过盈配合,方板用螺栓紧固在平台上,从而磁钢的移动带动平台产生位移。
较佳地,所述笼式结构部分:进一步包括平台、弹性钢丝及底座,其中,
平台,上端用于安装样片,下端开48个圆孔,与弹性钢丝采用过渡配合并用环氧树脂胶粘合;
弹性钢丝,在纵向可以支撑平台和触头加载力,在水平方向可以产生挠曲变形,使与之连接的平台产生微位移,48跟弹性钢丝呈圆形有序的分布,保证受力及移动的各向同性;
底座,下端与基座紧固,上端对应弹簧钢丝的位置开圆孔,采用过渡配合并用环氧树脂胶与弹性钢丝固定。
附图说明
图1为本发明二维微动平台装置的组成框图。
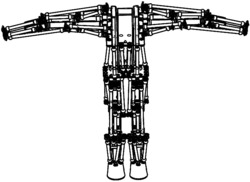
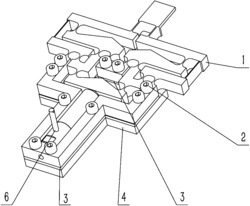
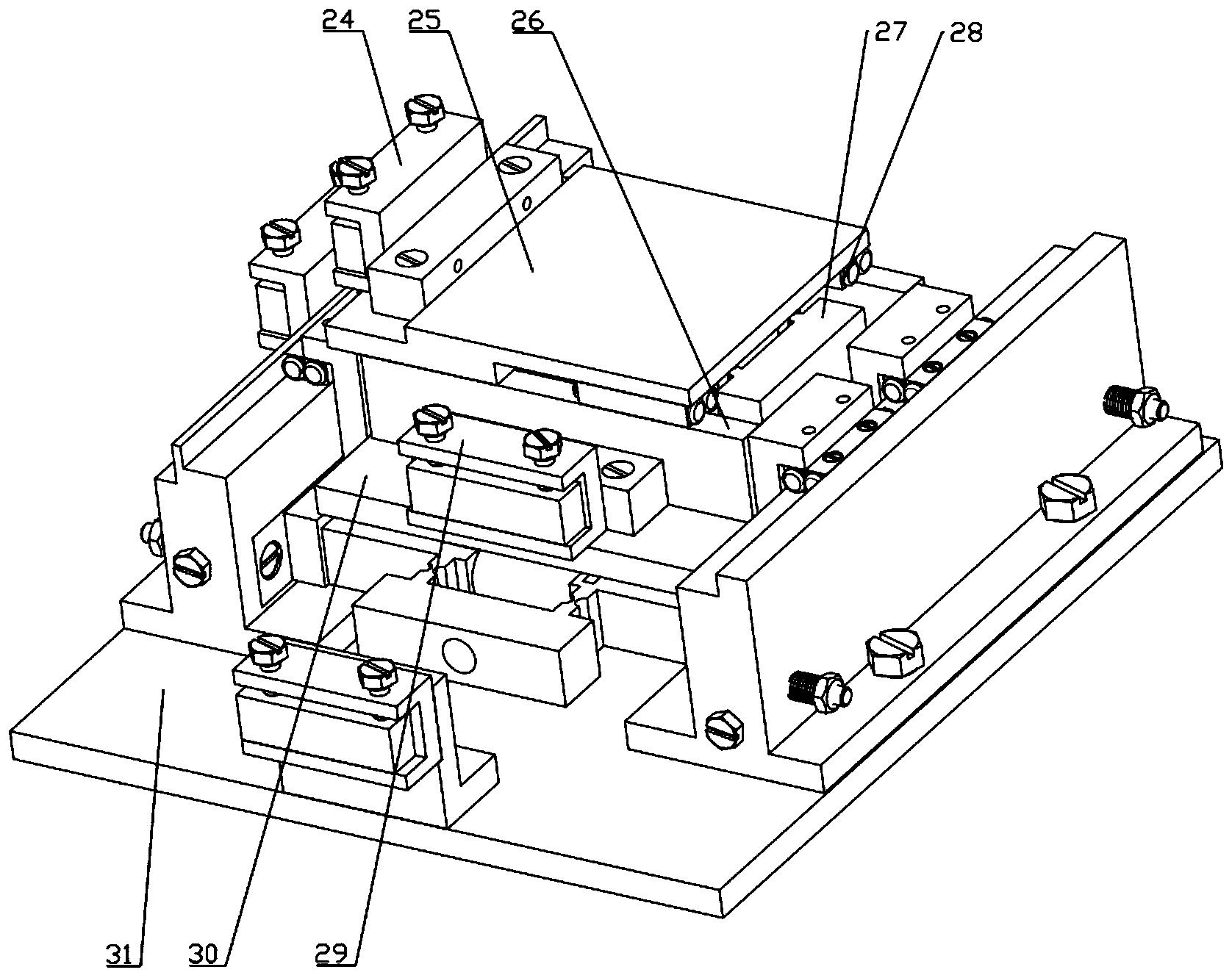
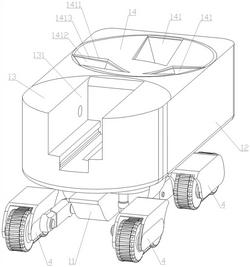
图2为本发明二维微动平台装置装配的立体结构示意图。
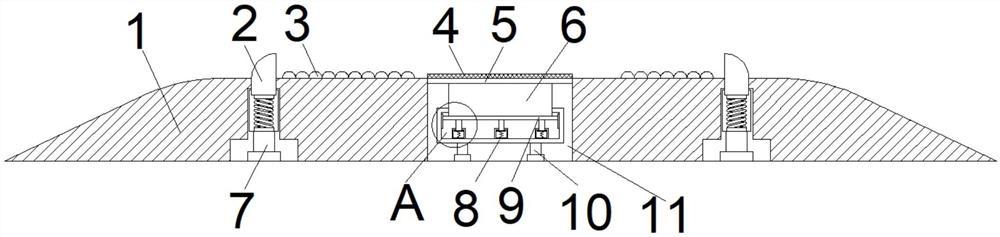
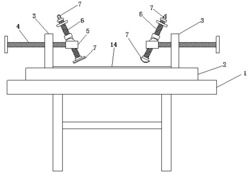
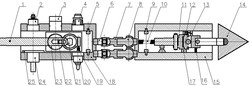
图3本发明二维微动平台装置的剖面结构示意图。
图4为本发明弹簧钢丝分布位置的示意图。
具体实施方式
为使本发明的目的、技术方案及结构更加清楚明白,以下参照附图并举实施例,对本发明作进一步详细说明。
如图1、图2、图3所示,该装置包括:电磁驱动部分、笼式结构部分和基座,各部分介绍如下:
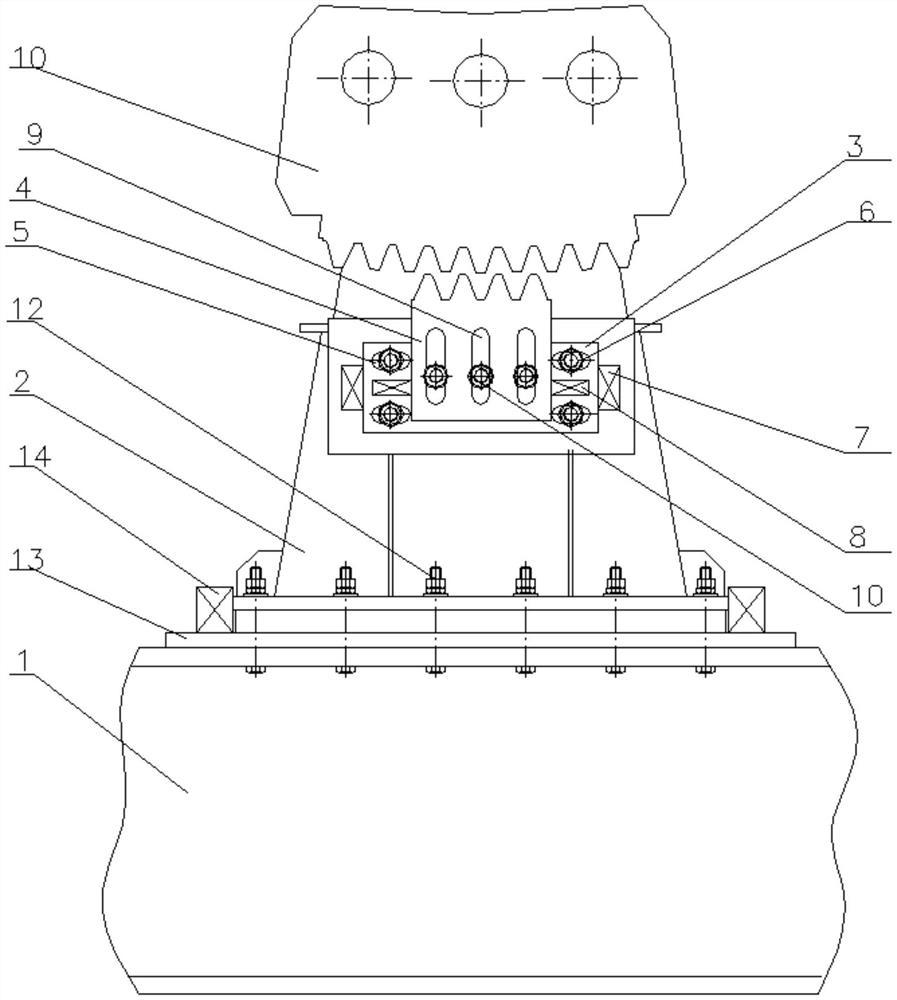
本发明二维微动平台装置的第一组成部分为电磁驱动部分,用于产生驱动力并将力传递给平台,电磁驱动部分包括:方板303、支撑架304、线圈骨架305、线圈306、磁钢307,其中,
线圈306缠绕在线圈骨架305上以后,用胶粘附在支撑架304上,支撑架304固定在基座309上,方板303中心开圆孔与圆柱形磁钢307过盈配合,磁钢的另一端悬浮在线圈之中,并且保持磁钢的轴线与线圈的轴线一致,方板303用螺栓固定在平台301上,线圈通入电流后,产生的磁场吸引或排斥悬浮在其中的磁钢,磁钢的移动带动方板,方板带动平台产生微位移,电磁驱动部分有四套,对称的放置于笼式结构的前后左右,每套结构相同,如图2所示。
本发明二维微动平台装置的第二组成部分为笼式结构部分,是微动平台的主体本身,用于产生微位移,并在撤去电流后能靠弹性钢丝的回复力回复至初始位置,笼式结构部分包括:平台301、弹性钢丝302、底座308,其中,
底座308下端固定在基座309上,上端开圆孔与直径为2mm的弹性钢丝302配合后用环氧树脂胶粘合,弹性钢丝上端与平台301下端同样为轴孔配合后用环氧树脂胶粘合,在平台受水平方向上的力后,由于弹性钢丝下端被固定,上端受力后相当于悬臂梁产生挠曲变形,多跟钢丝同时受力,限制平台产生过大位移,48跟弹性钢丝的位置分布如图4所示。
本发明二维微动平台装置的第三组成部分为基座309,用于支撑并固定支撑架304和底座308。
具体来说,本发明的二维微动装置包括:平台301、弹性钢丝302、方板303、支撑架304、线圈骨架305、线圈306、磁钢307、底座308以及基座309,其中,
方板303,线圈骨架305、线圈306、磁钢307均为4个,前后左右对称放置于笼式结构的周围,弹性钢丝302为48跟,呈圆形有序的分布在平台301和底座308之间,当四个线圈通以不同大小、方向的电流时,可以对平台产生不同大小和方向的力,进而使平台可以在平面方向上做任意轨迹的微运动;
较佳地,通过电磁驱动使平台产生微位移祛除了机械摩擦造成的摩擦,对称放置的电磁驱动部分增大了驱动力,克服了力与位移的非线性失真。
较佳地,48跟弹性钢丝呈圆形分布,在平面内可实现各个方向运动的一致性,同时弹性钢丝在纵向能够支撑平台和触头加载力,在横向受力变形后可依靠弹性力回复至起始位置。
由上述可见,本发明二维微动平台装置采用独特的结构设计,可以很好的实现平台在二维任意方向上的往复微运动,通过控制输入电流的大小和方向,可使平台完成所需的运动轨迹,从而更好的模拟实际触点之间的运动。
以上举较佳实施例,对本发明的目的、技术方案和优点进行了进一步详细说明,所应理解的是,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内,本发明所主张的权利范围应以发明申请范围所述为准,而非仅限于上述实施例。
一种二维微动平台装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0