







专利摘要
本发明公开了一种基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法,方法包括:构建多电机伺服系统的动力学方程;利用模型参考自适应法对多电机伺服系统输入的负载惯量进行辨识;根据一阶跟踪微分器、二阶扩张状态观测器以及多电机伺服系统速度环中的扰动构建一阶自抗扰模型,并获取非线性状态误差反馈控制律;基于双曲正切柔化切换函数改进趋近律,构造带积分的滑模控制对非线性状态误差反馈控制律进行补偿优化,获得最终的控制律,进而实现多电机伺服系统自抗扰滑模速度控制。本发明相对于分区PID控制和积分滑模控制,在变惯量情况下,复合控制策略对惯量变化情况具有更好的适应性,能取得更好的控制效果,控制系统的鲁棒性强。
权利要求
1.一种基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法,其特征在于,包括以下步骤:
步骤1、构建多电机伺服系统的动力学方程;
步骤2、利用模型参考自适应法对多电机伺服系统输入的负载惯量进行辨识;
步骤3、针对变惯量多电机伺服系统,根据一阶跟踪微分器、二阶扩张状态观测器以及多电机伺服系统速度环中的扰动构建一阶自抗扰模型,并获取一阶自抗扰模型的非线性状态误差反馈控制律;具体为:
步骤3-1、根据一阶跟踪微分器、二阶扩张状态观测器以及多电机伺服系统速度环中的扰动构建一阶自抗扰模型为:
式中,y为电机转速的实际值,z
其中,所述一阶跟踪微分器的公式为:
式中,
式中,v为速度给定值,
所述二阶扩张状态观测器公式为:
所述多电机伺服系统速度环中的扰动为:
式中,J
步骤3-2、基于式(1),令
针对式(6),令:
根据式(6)、式(7)获得一阶自抗扰模型的非线性状态误差反馈控制律为:
步骤4、基于双曲正切柔化切换函数改进趋近律,构造带积分的滑模控制对一阶自抗扰模型的非线性状态误差反馈控制律进行补偿优化,获得最终的控制律,进而实现多电机伺服系统自抗扰滑模速度控制。
2.根据权利要求1所述的基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法,其特征在于,步骤1所述构建多电机伺服系统的动力学方程:
式中,J
3.根据权利要求1所述的基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法,其特征在于,步骤2所述利用模型参考自适应法对多电机伺服系统输入的负载惯量进行辨识,具体为:
步骤2-1、将负载惯量折算至电机轴上:
式中,n为实际电机数目,J
步骤2-2、根据多电机伺服系统的动力学方程,忽略摩擦与非线性扰动,获得惯量与角速度模型为:
式中,T
步骤2-3、将公式(11)离散化,设置采样时间T
式中,ω
一个T
步骤2-4、模型参考自适应方法包括参考模型和可调模型,针对上述公式(14)所示的离散方程,令
ω
式中,
根据误差e(k)以及Popov超稳定性理论获得模型参考自适应法的迭代辨识方程:
式中,β为增益因子,
根据
4.根据权利要求1所述的基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法,其特征在于,步骤4所述基于双曲正切柔化切换函数改进趋近律,构造带积分的滑模控制对一阶自抗扰模型的非线性状态误差反馈控制律进行补偿优化,获得最终的控制律,进而实现多电机伺服系统自抗扰滑模速度控制,具体为:
步骤4-1、根据描述接近运动过程最常见的指数逼近趋近律和双曲正切柔化切换函数,获得改进的指数趋近律为:
式中,S为滑模面,ε为增益系数,tanh(S)为双曲正切柔化切换函数,|x|
其中,所述描述接近运动过程最常见的指数逼近趋近律为:
式中,sgn为符号函数;
步骤4-2、构造带积分的滑模控制:
构造滑模面:
S=e
取
根据式(21)和步骤4-1的趋近律
u
步骤4-3、利用式(22)对一阶自抗扰模型的非线性状态误差反馈控制律进行补偿优化,获得最终的控制律为:
说明书
技术领域
本发明属于多电机伺服系统领域,特别是一种基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法。
背景技术
为了快速跟踪到层出不穷的空中机动目标,武器的伺服系统驱动功率大大增加。针对单电机驱动功率不足的问题,需采用多个电机联合驱动负载。使用多电机驱动负载解决方案可以提高驱动功率,增加系统冗余并提高运行可靠性。
在实际应用中,电机参数的差异、系统的干扰、机械轴承及齿轮间隙因素的存在导致的系统非线性,会使系统的同步性能变差,这将影响系统的可靠性和准确性。在实现多电机同步运行的基础上,针对负载惯量的剧烈且短时的变化,伺服系统需要更智能的控制理论,使控制系统更加稳定和稳健。
为了消除负载惯量对伺服系统的动态性能、稳态精度、系统鲁棒性的影响,国内外学者做了一些研究,文献“Adaptive synchronization of networked multi-agentsystems considering transient responses and disturbances”采用了自适应跟踪算法,跟踪负载惯量的状态,但是在线辨识并且更正负载惯量的时间过长;论文“Sliding-mode control-based adaptive PID control with compensation controller formotion synchronization of dual servo system”设计了一种基于滑模控制的自适应PID控制方法,根据滑模面的存在,基于梯度下降法推导出PID控制器增益参数的调整规律,但是由于抖振的存在,使得滑模控制品质下降。这些方法都存在一定的局限性,且单独运用控制品质不高,伺服系统需要更智能的控制理论,使控制系统更加稳定和稳健。对于非线性系统的控制问题,滑模变结构控制是很好的解决方案之一。但是由于抖振的存在以及数学模型是近似模型的原因,导致滑模控制品质下降。
发明内容
本发明的目的在于提供一种具有更好适应性和控制效果的多电机伺服系统自抗扰滑模速度控制方法。
实现本发明目的的技术解决方案为:一种基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法,包括以下步骤:
步骤1、构建多电机伺服系统的动力学方程;
步骤2、利用模型参考自适应法对多电机伺服系统输入的负载惯量进行辨识;
步骤3、针对变惯量多电机伺服系统,根据一阶跟踪微分器、二阶扩张状态观测器以及多电机伺服系统速度环中的扰动构建一阶自抗扰模型,并获取一阶自抗扰模型的非线性状态误差反馈控制律;
步骤4、基于双曲正切柔化切换函数改进趋近律,构造带积分的滑模控制对一阶自抗扰模型的非线性状态误差反馈控制律进行补偿优化,获得最终的控制律,进而实现多电机伺服系统自抗扰滑模速度控制。
本发明与现有技术相比,其显著优点为:1)不依赖于受控对象的精确的数学模型,可以精确的辨识出不同的负载惯量;2)能够有效削弱滑模控制造成的抖振现象并减小稳态误差;3)在变惯量情况下,能使得系统响应速度不变慢,并保持较好的跟踪精度;4)将自抗扰、自适应等技术与滑模技术相结合获得高性能的控制品质,在不确定的扰动作用下也可以保证控制精度,相对于分区PID控制和积分滑模控制,在变惯量情况下,复合控制策略对惯量变化情况具有更好的适应性,能取得更好的控制效果,控制系统的鲁棒性强。
下面结合附图对本发明作进一步详细描述。
附图说明
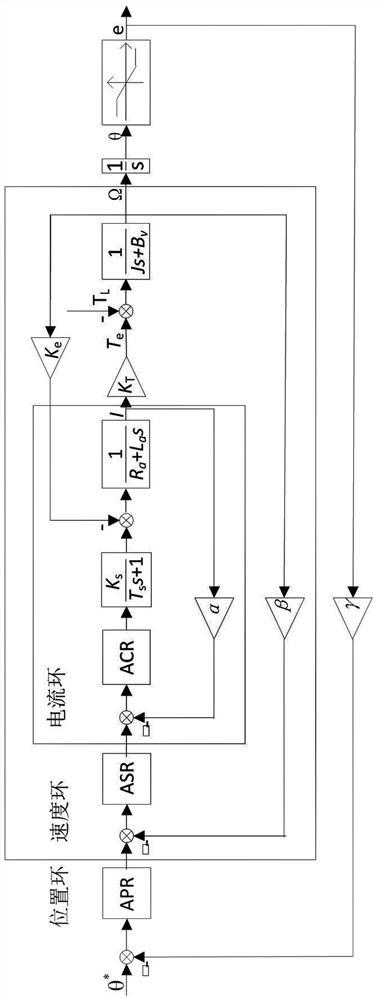
图1为多电机伺服系统结构框图。
图2为多电机伺服系统滑模速度控制框图。
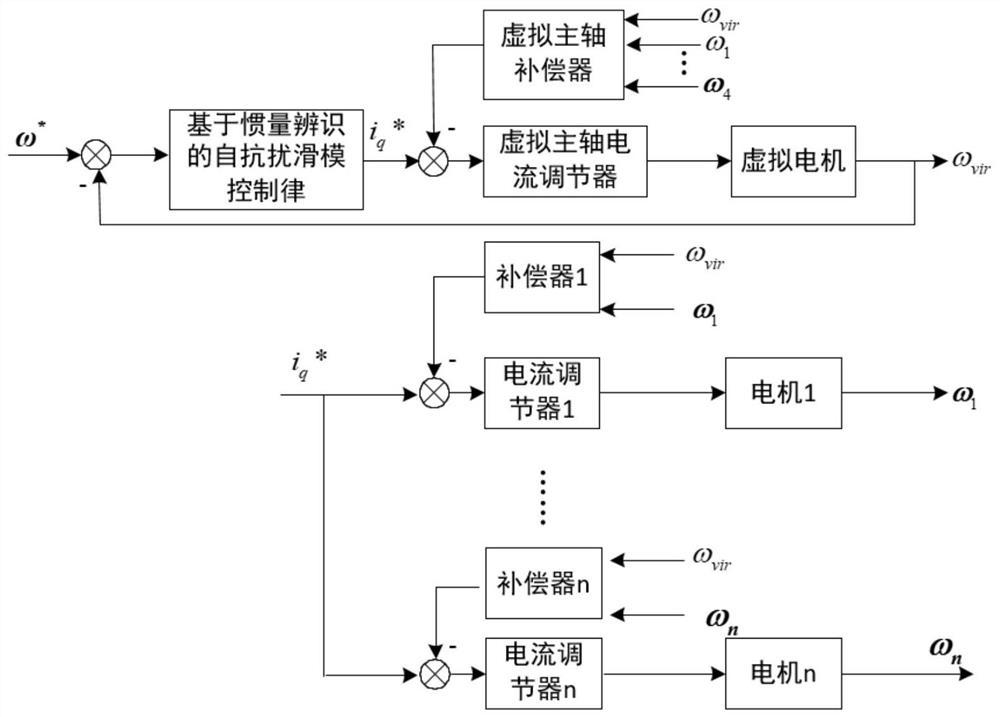
图3为本发明基于复合控制策略的多电机伺服系统速度控制框图。
具体实施方式
本发明基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法,包括以下步骤:
步骤1、构建多电机伺服系统的动力学方程;
步骤2、利用模型参考自适应法对多电机伺服系统输入的负载惯量进行辨识;
步骤3、针对变惯量多电机伺服系统,根据一阶跟踪微分器、二阶扩张状态观测器以及多电机伺服系统速度环中的扰动构建一阶自抗扰模型,并获取一阶自抗扰模型的非线性状态误差反馈控制律;
步骤4、基于双曲正切柔化切换函数改进趋近律,构造带积分的滑模控制对一阶自抗扰模型的非线性状态误差反馈控制律进行补偿优化,获得最终的控制律,进而实现多电机伺服系统自抗扰滑模速度控制。
进一步地,结合图1,步骤1构建多电机伺服系统的动力学方程:
式中,Ji=Jmi+Jci/KR2,bi=bmi+bci/KR2,Cei=npiΨfi,θi为电机的机械角位移,ωi为电机的角速度,θL为负载的角位移,ωL为负载的角速度,Jmi为电机的转动惯量,Jci为小齿轮的等效转动惯量,KR为行星减速器的减速比,CTi为电机转矩系数,iqi为矢量控制分量q轴电流,bmi表示每个电动机的等效粘性摩擦系数,bci表示等效的粘性摩擦系数,KL为啮合弹性系数,KG为齿轮与大齿圈的减速比,Δ2i为非线性因素及其他一些建模不确定项,JL为齿圈也即负载的等效转动惯量,bL为齿圈的等效粘性摩擦系数, 为负载的角速度,Δ1为负载齿轮侧的不确定项,Rsi为定子绕组相电阻,Lqi为q轴的定子电感,npi为极对数,Ψfi为电机永磁体磁链,Uqi为电机在q轴的等效电压。
进一步地,步骤2中利用模型参考自适应法对多电机伺服系统输入的负载惯量进行辨识,具体为:
步骤2-1、将负载惯量折算至电机轴上:
式中,n为实际电机数目,Ji、JL分别为电机和负载的惯量,KL为啮合弹性系数,KG为齿轮与大齿圈的减速比,通过对折算到电机轴上的负载惯量Ji′的辨识获得JL的变化;
步骤2-2、根据多电机伺服系统的动力学方程,忽略摩擦与非线性扰动,获得惯量与角速度模型为:
式中,Te为电磁转矩,TL为负载转矩;
步骤2-3、将公式(3)离散化,设置采样时间Ts,获得:
式中,ωm(k)为实际转速,用k-1代替k获得:
一个Ts内负载转矩保持不变,即TL(k-1)=TL(k-2),整理上式(4)(5)并将两式相减获得最终的离散方程为:
步骤2-4、模型参考自适应方法包括参考模型和可调模型,针对上述公式(6)所示的离散方程,令 则获得参考模型如公式(7)、可调模型如公式(8):
ωm(k)=2ωm(k-1)-ωm(k-2)+γΔTe(k-1) (7)
式中, 为估计转速,其与实际转速的误差为
根据误差e(k)以及Popov超稳定性理论获得模型参考自适应法的迭代辨识方程:
式中,β为增益因子, 为辨识目标,改变增益因子可调节该算法以获得好的辨识效果;
根据 以及上述中的 即可完成对负载惯量的辨识。
进一步地,步骤3中针对变惯量多电机伺服系统如图2所示,根据一阶跟踪微分器、二阶扩张状态观测器以及多电机同步伺服系统速度环中的扰动构建一阶自抗扰模型,并获取一阶自抗扰模型的非线性状态误差反馈控制律,具体为:
步骤3-1、根据一阶跟踪微分器、二阶扩张状态观测器以及多电机伺服系统速度环中的扰动构建一阶自抗扰模型为:
式中,y为电机转速的实际值,z1为输出转速的跟踪值, 为输出转速的加速度,z2为速度环综合扰动的估计值, 为综合扰动估计值的加速度,b1为补偿因子,β1,β2为增益因子,u为控制量,γ1,γ2为噪声系数,α1,α2为速度误差指数,ωvir为虚拟主轴电机的速度, 为虚拟主轴的等效转动惯量估计值,bvir表示阻尼系数;
其中,一阶跟踪微分器的公式为:
式中,
式中,v为速度给定值, 为过渡信号,z1为输出转速的跟踪值,z1-v为速度误差值,可调参数r与跟踪速度成正比,fal为非线性函数,α为速度误差指数,γ为噪声系数,sgn为符号函数;
二阶扩张状态观测器公式为:
多电机伺服系统速度环中的扰动为:
式中,Jvir为虚拟主轴的等效转动惯量,TLvir为折算到电机轴端的负载转矩;
步骤3-2、基于式(10),令 获得:
针对式(15),令:
根据式(15)、式(16)获得一阶自抗扰模型的非线性状态误差反馈控制律为:
进一步地,步骤4中基于双曲正切柔化切换函数改进趋近律,构造带积分的滑模控制对一阶自抗扰模型的非线性状态误差反馈控制律进行补偿优化,获得最终的控制律,进而实现多电机伺服系统自抗扰滑模速度控制如图3所示,具体为:
步骤4-1、根据描述接近运动过程最常见的指数逼近趋近律和双曲正切柔化切换函数,获得改进的指数趋近律为:
式中,S为滑模面,ε为增益系数,tanh(S)为双曲正切柔化切换函数,|x|λ为状态变量的幂次项,-kS为指数趋近项;
其中,描述接近运动过程最常见的指数逼近趋近律为:
式中,sgn为符号函数;
步骤4-2、构造带积分的滑模控制:
构造滑模面:
S=e1=v1-z1 (20)
取 对滑模面取微分可得:
根据式(21)和步骤4-1的趋近律 获得滑模控制为:
u0=-εtanh(e1)|e1|λ-ke1 (22)
步骤4-3、利用式(22)对一阶自抗扰模型的非线性状态误差反馈控制律进行补偿优化,获得最终的控制律为:
本发明基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法,相对于分区PID控制和积分滑模控制,在变惯量情况下,复合控制策略对惯量变化情况具有更好的适应性,能取得更好的控制效果,控制系统的鲁棒性强。
基于惯量辨识的多电机伺服系统自抗扰滑模速度控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0