










专利摘要
本发明公开了一种变步长lp范数LMS算法的稀疏系统辨识方法,并对其收敛性进行了分析,该算法将系统迭代过程中产生的误差平方根引入到步长控制中,并引入正常数Vth以平衡系统的收敛速度和稳态误差,在迭代过程中能够实时有效调整系统的步长。为了挖掘未知信道的稀疏性,我们在代价函数中引入了lp范数,该算法可以实现对稀疏系统的精确辨识。该算法在保持传统LMS算法优良的收敛速度和稳态性能的基础上,进一步提高了系统的收敛速度和估计精度。实验仿真中对比了几种较新的稀疏自适应算法,理论和实验均验证了所提算法的优越性。
权利要求
1.一种变步长l
A01.训练输入信号x(n);
x(n)=[x
其中,n为当前时刻,N为输入序列的信号长度,T为矩阵转置符号;
A02.初始化自适应滤波系统的抽头权重向量h(n);
A03.发送输入信号x(n)至待识别稀疏系统和自适应滤波系统;
A04.获取待识别稀疏系统的输出信号d(n),d(n)为系统的期望输出信号:
d(n)=x
其中,h
A05.计算自适应滤波系统的输出信号y(n),y(n)为系统的实际输出信号:
y(n)=h
其中,h(n)为抽头权重向量;
A06.计算待识别稀疏系统与自适应滤波系统之间的输出误差e(n):
e(n)=d(n)-h
A07.构造代价函数L(n):
其中,γ为稀疏约束加权值,
A08.计算代价函数L(n)的梯度
其中,p为大于0小于1的数值,|h(n)|
A09.构造动态步长μ(n):
其中,μ为固定步长,V
A10.计算自适应滤波器的抽头权重向量的更新函数:
h(n+1)=h(n)+μ(n)e(n)x(n)-K(n)psgn[h(n)]/(ε+|h(n)|
K(n)=γμ(n);
其中,K(n)为正则化参数,0<ε<1;
A11.判断[e(n)-e(n-1)]>ε
2.根据权利要求1所述的变步长l
3.根据权利要求1所述的变步长l
其中,λ
说明书
技术领域
本发明属于稀疏信号处理领域,涉及一种变步长lp范数LMS算法的稀疏系统辨识方法,是在含噪声环境下的稀疏系统辨识,可用于宽带无线通信系统的信道估计等。
背景技术
自适应滤波具有较强的适应性和更好的过滤性能,该算法已经在信道均衡、线性预测、谱分析和系统识别、雷达、回波消除等领域得到了广泛应用。自适应滤波的目的是对不确定的系统或信息进行处理。这里的“不确定性”意味着所研究的信息处理过程及其环境的数学模型尚未完全确定,它包含一些未知和随机的因素,例如,一些噪音信号会以不同方式影响信息处理,这些干扰和噪声信号的统计特性常常是未知的。面对客观存在的各种不确定性,如何综合处理信息,使某些指定的性能指标达到最优或近似最优,是自适应滤波算法需要解决的问题。
Widrow和Hoff提出的最小均方误差(LMS)自适应算法是最流行的自适应算法之一,该算法的权值更新函数采用固定步长,而步长的大小则反映了稳态误差和收敛速度之间的折衷,小的步长可给出小的稳态误差,但收敛速度较慢;大的步长可给出快的收敛速度却也导致了稳态误差较大,收敛速度和稳态误差性能不可同时兼得。为解决该问题,Raymond H.Kwong 等研究者提出了可变步长LMS算法(Visual Step Size Least MeanSquare,VSSLMS),该算法的步长调整由预测误差的平方值进行控制,大的预测误差值会导致步长增加以提供更快的跟踪,而小的预测误差会导致步长减小以产生更小的稳态误差。LMS/F算法是由SJ Lim,JG Harris提出的一种由LMS算法和LMF算法组合而成的自适应滤波算法,也可以看成是一种步长可变的自适应滤波算法,该算法在权值向量距离最优值较远时,收敛速度和稳定性比LMS 算法好,在权值向量接近最优解时,稳定性比LMF算法好,但由于LMS/F算法在权值向量更新中采用误差的三阶函数,因而会对附加噪声和信噪比都非常敏感。
对于稀疏未知系统,上述自适应算法并不能有效利用系统中的稀疏结构信息,参数估计性能效率不高。
发明内容
针对上述现有技术中描述的不足,本发明提供一种变步长lp范数LMS算法的稀疏系统辨识方法,本发明是为了提高自适应滤波算法的收敛速度和稀疏未知系统的估计精度,将系统迭代过程中产生的误差平方根引入到步长控制中,并由正常数Vth平衡系统的收敛速度和稳态误差,为了挖掘未知信道的稀疏性,在代价函数中引入了lp范数,本发明在保持传统LMS 算法优良的收敛速度和稳态性能的基础上,进一步提高了系统的收敛速度和估计精度。
为解决上述技术问题,本发明所采用的技术方案是:
一种变步长lp范数LMS算法的稀疏系统辨识方法,步骤如下:
A01.训练输入信号x(n):
x(n)=[x0x1…xN-1]
其中,n为当前时刻,N为输入序列的信号长度,T为矩阵转置符号。
A02.初始化自适应滤波系统的抽头权重向量h(n)。
对抽头权重向量h(n)进行初始化是将所有抽头权重向量h(n)置为零。
A03.发送输入信号x(n)至待识别稀疏系统和自适应滤波系统。
A04.获取待识别稀疏系统的输出信号d(n),d(n)为系统的期望输出信号:
d(n)=x
其中,h0为稀疏信道矢量,v(n)为零均值高斯白噪声。
A05.计算自适应滤波系统的输出信号y(n),y(n)为系统的实际输出信号:
y(n)=h
其中,h(n)为抽头权重向量。
A06.计算待识别稀疏系统与自适应滤波系统之间的输出误差e(n):
e(n)=d(n)-h
A07.构造代价函数L(n):
其中,γ为稀疏约束加权值, 是p范数,且0<p<1。
A08.计算代价函数L(n)的梯度
其中,p为大于0小于1的数值,|h(n)|
A09.构造动态步长μ(n):
其中,μ为固定步长,Vth是调节因子,且0<Vth<1, 为输出误差e(n)的平方根。
A10.计算自适应滤波器的抽头权重向量的更新函数:
h(n+1)=h(n)+μ(n)e(n)x(n)-K(n)psgn[h(n)]/(ε+|h(n)|
K(n)=γμ(n);
其中,K(n)为正则化参数,ε为很小的正数。
A11.判断[e(n)-e(n-1)]>ε0是否成立,若成立,则返回步骤A01;如果不等式不成立,则系统收敛,迭代结束,得到连续的稀疏系统的辨识值。
而系统收敛的判定方法为:
且
其中,λmax是输入信号的自相关矩阵的最大特征值,R是输入信号的自协方差矩阵。
本发明的优点在于:将误差的平方根引入到系统迭代过程时的步长控制中,并引入一个正常数以平衡系统的收敛速度和稳态误差,使得在迭代过程中能够实时调整系统的步长;引入的lρ范数自适应零吸引子可以加快小系数的收敛速度,消除大系数引起的系统辨识估计偏差。本发明具有较快的收敛速度和较高的估计精度、系统的稀疏度变化时,本发明的跟踪能力强,计算复杂度较低。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
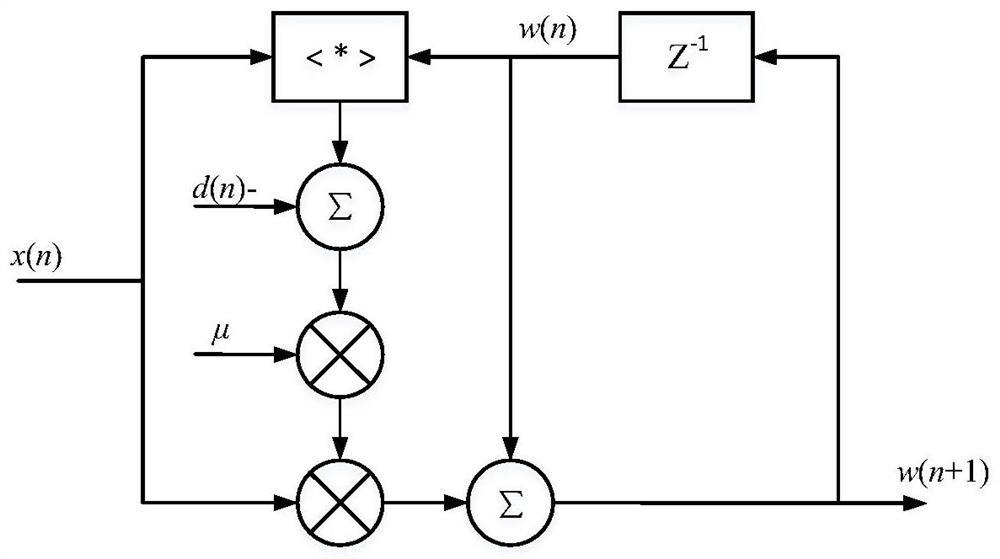
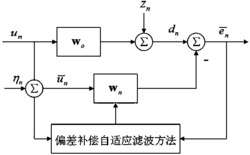
图1是本发明的系统结构框图。
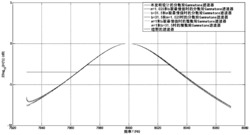
图2是系统信噪比(SNR)为10dB时,传统的LMS、LMS/F、VSS-LMS算法与本发明的性能仿真对比图。
图3是系统信噪比(SNR)为20dB时,传统的LMS、LMS/F、VSS-LMS算法与本发明的性能仿真对比图。
图4是信噪比为10dB时,当信道的稀疏度产生突变的情况下,传统的LMS、LMS/F、VSS-LMS 算法与本发明的跟踪情况的对比图。
图5是信噪比为20dB时,当信道的稀疏度产生突变的情况下,传统的LMS、LMS/F、VSS-LMS 算法与本发明的跟踪情况的对比图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提出一种变步长lp范数LMS算法的稀疏系统辨识方法。该方法在固定步长μ的基础上引入了误差函数的平方根来调节步长,利用平方根对小数(小于1)的放大作用对误差进行非线性放大,当误差较大时,该动态步长能提供一个较大值以促进均方误差的收敛;当误差较小时,动态步长能提供一个较小值以降低稳态误差,为了利用未知信道的的稀疏性,在代价函数中引入了lρ范数。
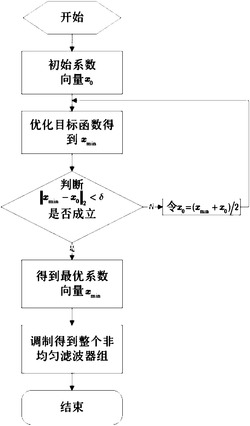
本实施例的一种变步长lp范数LMS算法的稀疏系统辨识方法,系统信道长度设为128。自适应滤波系统如图1所示,方法的流程为:首先进行滤波器权值的初始化设置,设定初始化条件;训练输入信号并获取期望信号的值,将输入信号经过自适应滤波器获取输出信号、计算滤波器输出信号和期望信号的误差、构建变步长函数、代价函数中引入p范数稀疏惩罚项、求出权值更新向量,并判断其是否收敛,若不收敛,则返回对输出进行滤波处理,每次返回后需要更新输入信号x(n);若收敛,则迭代结束。
具体步骤为:
A01.训练输入信号x(n):
x(n)=[x0 x1 … xN-1]
其中,n为当前时刻,N为输入序列的信号长度,T为矩阵转置符号。
A02.初始化自适应滤波系统的抽头权重向量h(n)。
h(n)=[h0 h1 … hN-1]
h(n)是长为N的自适应滤波器信道估计值。
而对抽头权重向量h(n)进行初始化是将所有抽头权重向量h(n)置为零。
A03.发送输入信号x(n)至待识别稀疏系统和自适应滤波系统。
A04.获取待识别稀疏系统的输出信号d(n),d(n)为系统的期望输出信号:
d(n)=x
其中,h0为稀疏信道矢量,是长为N(N=128)的最优(维纳)解,仅由K个非零信道抽头组成,即稀疏度为k,分别取2和4;v(n)为零均值高斯白噪声且假设与x(n)统计独立。
A05.计算自适应滤波系统的输出信号y(n),y(n)为系统的实际输出信号:
y(n)=h
其中,h(n)为抽头权重向量。
A06.计算待识别稀疏系统与自适应滤波系统之间的输出误差e(n):
e(n)=d(n)-h
e(n)是第n次迭代得到的信道系数估计误差。
A07.构造代价函数L(n),为了对稀疏系统进行辨识,在代价函数中引入能够表征稀疏特性的lp范数:
其中,γ为稀疏约束加权值,γ=0.1; 是p范数,且0<p<1。
当p趋近于零时,lρ范数近似于l0范数:
当p趋近于1时,lρ范数近似于l1范数:
A08.计算代价函数L(n)的梯度
其中,p为大于0小于1的数,|h(n)|
A09.构造动态步长μ(n):
其中,μ为固定步长,在本实施例中μ=0.012,Vth是调节因子,Vth=0.8, 为输出误差e(n)的平方根。
该步长利用平方根对小数(随着迭代的进行,误差一般都小于1)的放大挖掘作用,将误差放大,从而加速了误差的收敛。Vth是一个常数调节因子,0<Vth<1,通过 和Vth的调节可以使自适应滤波器在迭代初期误差较大时,步长μ(n)大于标准LMS的步长μ,收敛速度加快;随着迭代进行,误差减小,μ(n)将小于标准LMS的步长μ,稳态误差降低。
A10.计算自适应滤波器的抽头权重向量的更新函数:
h(n+1)=h(n)+μ(n)e(n)x(n)-K(n)psgn[h(n)]/(ε+|h(n)|
K(n)=γμ(n);
其中,K(n)为正则化参数,ε=0.05。
A11.判断[e(n)-e(n-1)]>ε0是否成立,若成立,则返回步骤A01;如果不等式不成立,则系统收敛,迭代结束,得到连续的稀疏系统的辨识值。
而系统收敛的判定方法为:
且
其中,λmax是输入信号的自相关矩阵的最大特征值,R是输入信号的自协方差矩阵。
而且,本发明将传统算法与本发明算法进行了仿真实验,如图2和3,分别是系统信噪比 (SNR)为10dB和20dB时,传统的LMS、LMS/F、VSS-LMS算法与本发明的性能仿真对比图。
图4和5是信噪比为10dB和20dB时,当信道的稀疏度产生突变的情况下,传统的LMS、LMS/F、 VSS-LMS算法与本发明的跟踪情况的对比图。
从对比图可知,本发明具有较快的收敛速度和较高的估计精度、系统的稀疏度变化时,本发明的跟踪能力强,计算复杂度较低。
上面所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种变步长l范数LMS算法的稀疏系统辨识方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0