








专利摘要
本发明涉及轧钢自动控制领域,提供一种全连续热轧薄带线卷前夹送辊的控制方法,包括:步骤1:废料进入废料斗准备。步骤2:带钢头部跟踪到位时2#下夹送辊打到轧制位,2#上夹送辊摆到初始辊缝。步骤3:2#卷取机建张后2#上夹送辊切换为压力闭环控制,1#下夹送辊打到轧制位;2#卷取机卷重到达后飞剪剪切,1#上夹送辊摆到初始辊缝,2#上夹送辊切换为位置闭环控制并摆到初始辊缝;1#卷取机建张后1#上夹送辊切换为压力闭环控制,1#下夹送辊打到切换位。步骤4:1#卷取机卷重到达后飞剪剪切,1#上夹送辊切换为位置闭环控制并摆到大辊缝。轧机连轧时转步骤2。本发明能够提高卷前夹送辊控制精度,保证卷型和高速切换的稳定。
权利要求
1.一种全连续热轧薄带线卷前夹送辊的控制方法,其特征在于,包括下述步骤:
步骤1:废料进入废料斗准备工作
步骤1.1:将1#上夹送辊辊缝打开至大辊缝;
步骤1.2:将1#下夹送辊通过液压缸位置环控制切换到切换位置;
步骤1.3:将2#上夹送辊辊缝打开至大辊缝;
步骤1.4:将2#下夹送辊切换到切换位置;
步骤1.5:飞剪后所有辊道加速至带钢速度的2~4倍;
其中,所述全连续热轧薄带线含有两台地下卷取机,所述两台地下卷取机包括1#卷取机、2#卷取机,机上设备依次包括轧机、1#导板、飞剪、1#夹送辊、2#导板、2#夹送辊、废料斗;所述1#夹送辊设置在1#卷取机的入口侧,所述2#夹送辊设置在2#卷取机的入口侧;所述1#夹送辊包括1#上夹送辊、1#下夹送辊,所述2#夹送辊包括2#上夹送辊、2#下夹送辊;每个上夹送辊均由2台液压缸驱动摆动,每个下夹送辊均由2台液压缸驱动移动;所述大辊缝为大于带钢厚度的辊缝;
步骤2:废料进入废料斗后,2#卷取机卷钢准备
当开轧第一卷钢时,带钢头部经过轧机到达飞剪位置后,飞剪根据设定好的切头长度切头后,根据剪切完成信号启动带钢头部位置跟踪的开始,跟踪位置到达S0位置时,飞剪后所有辊道速度改为正常超前速度,2#下夹送辊由切换位置定位到轧制位置,2#下夹送辊定位完成后,2#上夹送辊下压摆位到初始辊缝;
当开轧非第一卷钢时,1#卷取机正在卷钢,若1#卷取机的卷重到达设定卷重,飞剪剪切开始,飞剪剪切完成后,根据剪切完成信号启动带钢头部位置跟踪的开始,跟踪位置到达S0位置时,飞剪后所有辊道速度改为正常超前速度,2#下夹送辊由切换位置定位到轧制位置,2#下夹送辊定位完成后,2#上夹送辊下压摆位到初始辊缝;
其中,S0为以飞剪为基准2#上夹送辊、2#下夹送辊动作时序可完成的位置,S0=S1-(T1+T2)V,S1为飞剪与2#夹送辊之间的距离,V为带钢速度,T1为2#下夹送辊的横移时间,T2为2#上夹送辊落下由大辊缝定位到初始辊缝的时间;所述初始辊缝为带钢厚度的0.92~0.98倍;所述正常超前速度为带钢速度的1.05~1.1倍;
步骤3:切换到1#卷取机卷钢
步骤3.1:2#卷取机建张后或以步骤2中飞剪剪切完成信号为启动信号的带钢头部跟踪位置到达设定阈值后,2#上夹送辊由位置闭环控制切换为压力闭环控制;
步骤3.2:2#卷取机建张后,1#下夹送辊由切换位置定位到轧制位置;
步骤3.3:2#卷取机计算卷重到达设定卷重阈值后飞剪剪切,飞剪剪切完成后,2#卷取机的卷筒加速,卷筒加速期间2#卷取机内的带钢尾部跟踪位置过1#夹送辊位置时,1#上夹送辊下压摆位到初始辊缝;
步骤3.4:飞剪分切后,当2#卷取机夹送辊前热检检失时,2#上夹送辊由压力闭环控制切换为位置闭环控制,同时2#上夹送辊摆位到初始辊缝;
步骤3.5:1#卷取机建张后或以步骤3.3中飞剪剪切完成信号为启动信号的带钢头部跟踪位置到达设定阈值后,1#上夹送辊切换为压力闭环控制;
步骤3.6:1#卷取机建张同时1#上夹送辊切换为压力闭环控制后,1#下夹送辊切换到切换位置;
步骤4:切换成2#卷取机卷钢
步骤4.1:1#卷取机计算卷重到达设定卷重阈值时,飞剪剪切分卷;
步骤4.2:飞剪剪切完成后,1#卷取机的卷筒加速,带钢尾部跟踪位置过1#夹送辊位置时,1#上夹送辊由压力闭环控制转换为位置闭环控制,1#上夹送辊摆位到大辊缝;
步骤5:若轧机连续轧制,则转至步骤2;若轧机没有钢且轧线上热检信号全部消失,则转至步骤1。
说明书
技术领域
本发明涉及轧钢自动控制技术领域,特别是涉及一种全连续热轧薄带线卷前夹送辊的控制方法。
背景技术
在全连续热轧薄带生产线中,卷前上、下夹送辊起着至关重要的作用:带钢穿入卷取机时,上夹送辊用来将带钢稳定带进卷取机,以顺利卷取;轧机抛钢时提供卷取机和夹送辊之间的张力;卷取机分卷时,上、下夹送辊配合动作以保证带钢顺利切换卷取机。现有的卷前夹送辊控制方法中,夹送辊后面安装有气动活门,通过气动活门来控制选择卷钢卷取机,而气动活门的动作速度较慢,飞剪剪切后,在两台卷取机切换过程中,不能满足高速切换要求。
发明内容
针对现有技术存在的问题,本发明提供一种全连续热轧薄带线卷前夹送辊的控制方法,能够提高卷前夹送辊控制的精度,保证卷型和高速切换的稳定性,且简单、实用。
本发明的技术方案为:
一种全连续热轧薄带线卷前夹送辊的控制方法,其特征在于,包括下述步骤:
步骤1:废料进入废料斗准备工作
步骤1.1:将1#上夹送辊辊缝打开至大辊缝;
步骤1.2:将1#下夹送辊通过液压缸位置环控制切换到切换位置;
步骤1.3:将2#上夹送辊辊缝打开至大辊缝;
步骤1.4:将2#下夹送辊切换到切换位置;
步骤1.5:飞剪后所有辊道加速至带钢速度的2~4倍;
其中,所述全连续热轧薄带线含有两台地下卷取机,所述两台地下卷取机包括1#卷取机、2#卷取机,机上设备依次包括轧机、第一导板、飞剪、1#夹送辊、第二导板、2#夹送辊、废料斗;所述1#夹送辊设置在1#卷取机的入口侧,所述2#夹送辊设置在2#卷取机的入口侧;所述1#夹送辊包括1#上夹送辊、1#下夹送辊,所述2#夹送辊包括2#上夹送辊、2#下夹送辊;每个上夹送辊均由2台液压缸驱动摆动,每个下夹送辊均由2台液压缸驱动移动;所述大辊缝为大于带钢厚度的辊缝;
步骤2:废料进入废料斗后,2#卷取机卷钢准备
当开轧第一卷钢时,带钢头部经过轧机到达飞剪位置后,飞剪根据设定好的切头长度切头后,根据剪切完成信号启动带钢头部位置跟踪的开始,跟踪位置到达S0位置时,飞剪后所有辊道速度改为正常超前速度,2#下夹送辊由切换位置定位到轧制位置,2#下夹送辊定位完成后,2#上夹送辊下压摆位到初始辊缝;
当开轧非第一卷钢时,1#卷取机正在卷钢,若1#卷取机的卷重到达设定卷重,飞剪剪切开始,飞剪剪切完成后,根据剪切完成信号启动带钢头部位置跟踪的开始,跟踪位置到达S0位置时,飞剪后所有辊道速度改为正常超前速度,2#下夹送辊由切换位置定位到轧制位置,2#下夹送辊定位完成后,2#上夹送辊下压摆位到初始辊缝;
其中,S0为以飞剪为基准2#上夹送辊、2#下夹送辊动作时序可完成的位置,S0=S1-(T1+T2)V,S1为飞剪与2#夹送辊之间的距离,V为带钢速度,T1为2#下夹送辊的横移时间,T2为2#上夹送辊落下由大辊缝定位到初始辊缝的时间;所述初始辊缝为带钢厚度的0.92~0.98倍;所述正常超前速度为带钢速度的1.05~1.1倍;
步骤3:切换到1#卷取机卷钢
步骤3.1:2#卷取机建张后或以步骤2中飞剪剪切完成信号为启动信号的带钢头部跟踪位置到达设定阈值后,2#上夹送辊由位置闭环控制切换为压力闭环控制;
步骤3.2:2#卷取机建张后,1#下夹送辊由切换位置定位到轧制位置;
步骤3.3:2#卷取机计算卷重到达设定卷重阈值后飞剪剪切,飞剪剪切完成后,2#卷取机的卷筒加速,卷筒加速期间2#卷取机内的带钢尾部跟踪位置过1#夹送辊位置时,1#上夹送辊下压摆位到初始辊缝;
步骤3.4:飞剪分切后,当2#卷取机夹送辊前热检检失时,2#上夹送辊由压力闭环控制切换为位置闭环控制,同时2#上夹送辊摆位到初始辊缝;
步骤3.5:1#卷取机建张后或以步骤3.3中飞剪剪切完成信号为启动信号的带钢头部跟踪位置到达设定阈值后,1#上夹送辊切换为压力闭环控制;
步骤3.6:1#卷取机建张同时1#上夹送辊切换为压力闭环控制后,1#下夹送辊切换到切换位置;
步骤4:切换成2#卷取机卷钢
步骤4.1:1#卷取机计算卷重到达设定卷重阈值时,飞剪剪切分卷;
步骤4.2:飞剪剪切完成后,1#卷取机的卷筒加速,带钢尾部跟踪位置过1#夹送辊位置时,1#上夹送辊由压力闭环控制转换为位置闭环控制,1#上夹送辊摆位到大辊缝;
步骤5:若轧机连续轧制,则转至步骤2;若轧机没有钢且轧线上热检信号全部消失,则转至步骤1。
本发明的有益效果为:
本发明通过在下夹送辊安装两个液压缸来驱动下夹送辊移动,使得下夹送辊能够通过液压系统快速响应;本发明中第一块钢进入卷取机前为切过头且被加速送入废料斗,为2#卷取机前上下夹送辊动作争取时间;2#卷取机前上下夹送辊动作顺利完成后带钢进入2#卷取机,当2#卷取机内的钢卷重量达到设定卷重H2时,启动飞剪自动剪切功能,剪切后的新的带钢头部进入1#卷取机卷取;在切换到1#卷取机之前,1#卷取机前下夹送辊提前打到轧制位,带钢进入1#卷取机前1#上夹送辊摆好位置,当1#卷取机内的钢卷重量达到设定卷重H1时,启动飞剪自动剪切功能,剪切后的新的带钢头部进入2#卷取机卷取,实现两台卷取机切换卷钢,通过对卷前夹送辊动作的精确控制,使得废料过任意1台卷取机的夹送辊时夹送辊动作都能够满足切换动作要求,卷取机分卷时上、下夹送辊都能够快速精准地配合动作以保证带钢顺利切换卷取机,能够保证卷型和高速切换的稳定性,且简单、实用,能够解决现有卷前夹送辊控制方法中存在的通过气动活门控制选择卷取机导致不能满足高速切换要求的技术问题。
附图说明
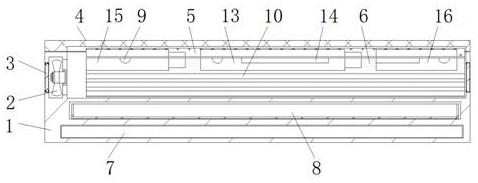
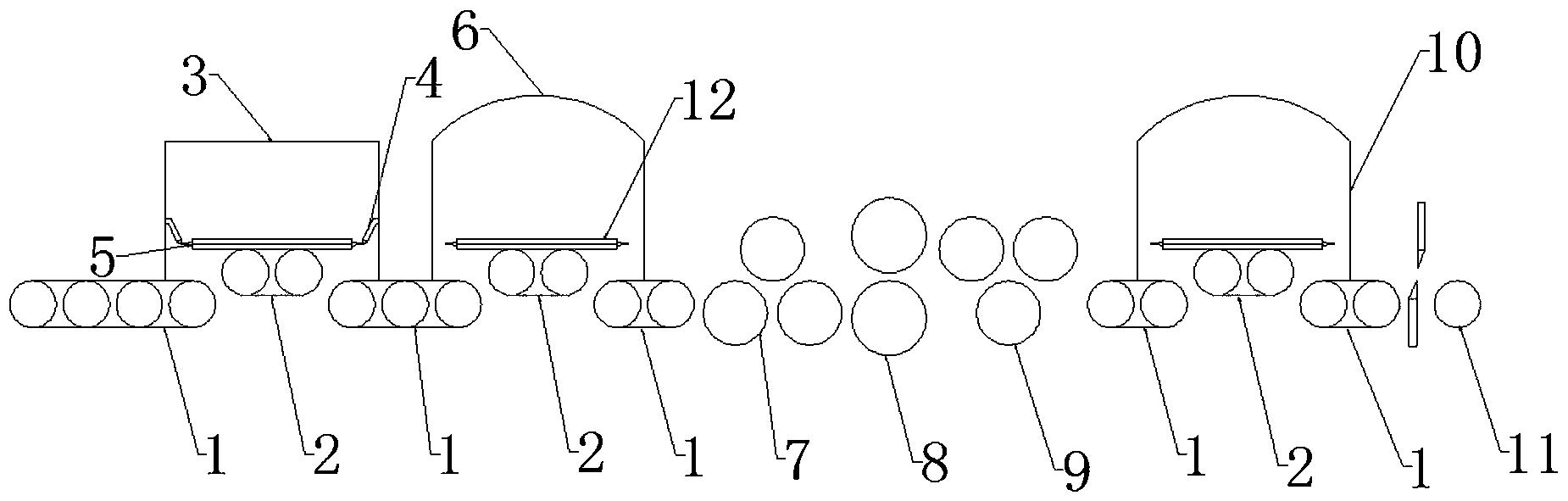
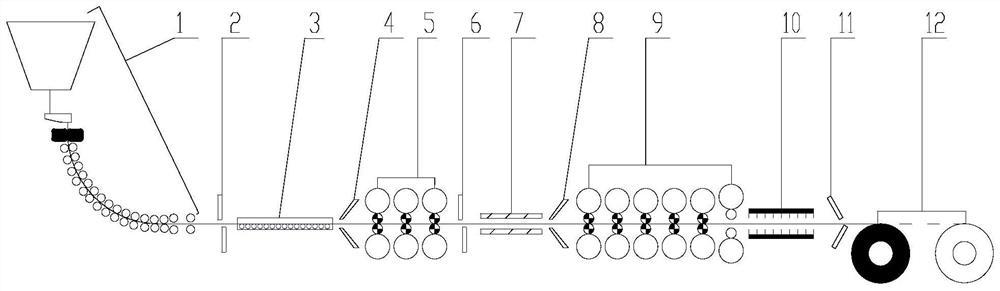
图1为具体实施方式中全连续热轧薄带线的结构示意图。
图2为本发明的全连续热轧薄带线卷前夹送辊的控制方法的流程图。
图中,1-轧机,2-1#导板,3-飞剪,4-1#夹送辊,4-1—1#上夹送辊,4-2—1#下夹送辊,5-2#导板,6-2#夹送辊,6-1—2#上夹送辊,6-2—2#下夹送辊,7-废料斗,8-1#卷取机,8-1-1-1#助卷辊,8-2-1-2#助卷辊,8-3-1-3#助卷辊,8-4-1-4#助卷辊,8-5-1#卷筒,9-2#卷取机,9-1-2-1#助卷辊,9-2-2-2#助卷辊,9-3-2-3#助卷辊,9-4-2-4#助卷辊,9-5-2#卷筒,10-1#热检扫描点,11-2#热检扫描点。
具体实施方式
下面将结合附图和具体实施方式,对本发明作进一步描述。
如图1所示,为本实施例中某钢厂全连续热轧薄带线的结构示意图。该轧线含有两台地下卷取机——1#卷取机8和2#卷取机9,机上设备顺序为轧机1、1#导板2、飞剪3、1#夹送辊4(包括1#上夹送辊4-1、1#下夹送辊4-2)、2#导板5、2#夹送辊6(包括2#上夹送辊6-1、2#下夹送辊6-2)、机上辊道、废料辊道、废料斗7。所述1#卷取机8包括1-1#助卷辊8-1、1-2#助卷辊8-2、1-3#助卷辊8-3、1-4#助卷辊8-4、1#卷筒8-5;所述2#卷取机9包括2-1#助卷辊9-1、2-2#助卷辊9-2、2-3#助卷辊9-3、2-4#助卷辊9-4、2#卷筒9-5。1#夹送辊4前、2#夹送辊6前分别设置有1#热检扫描点10、2#热检扫描点11。
其中,卷取机前夹送辊设置在地下卷取机入口侧——1#夹送辊4设置在1#卷取机8的入口侧、2#夹送辊6设置在2#卷取机9的入口侧,将钢板头部引入地下卷取机的同时,对卷板剪切后卷板施加张力。
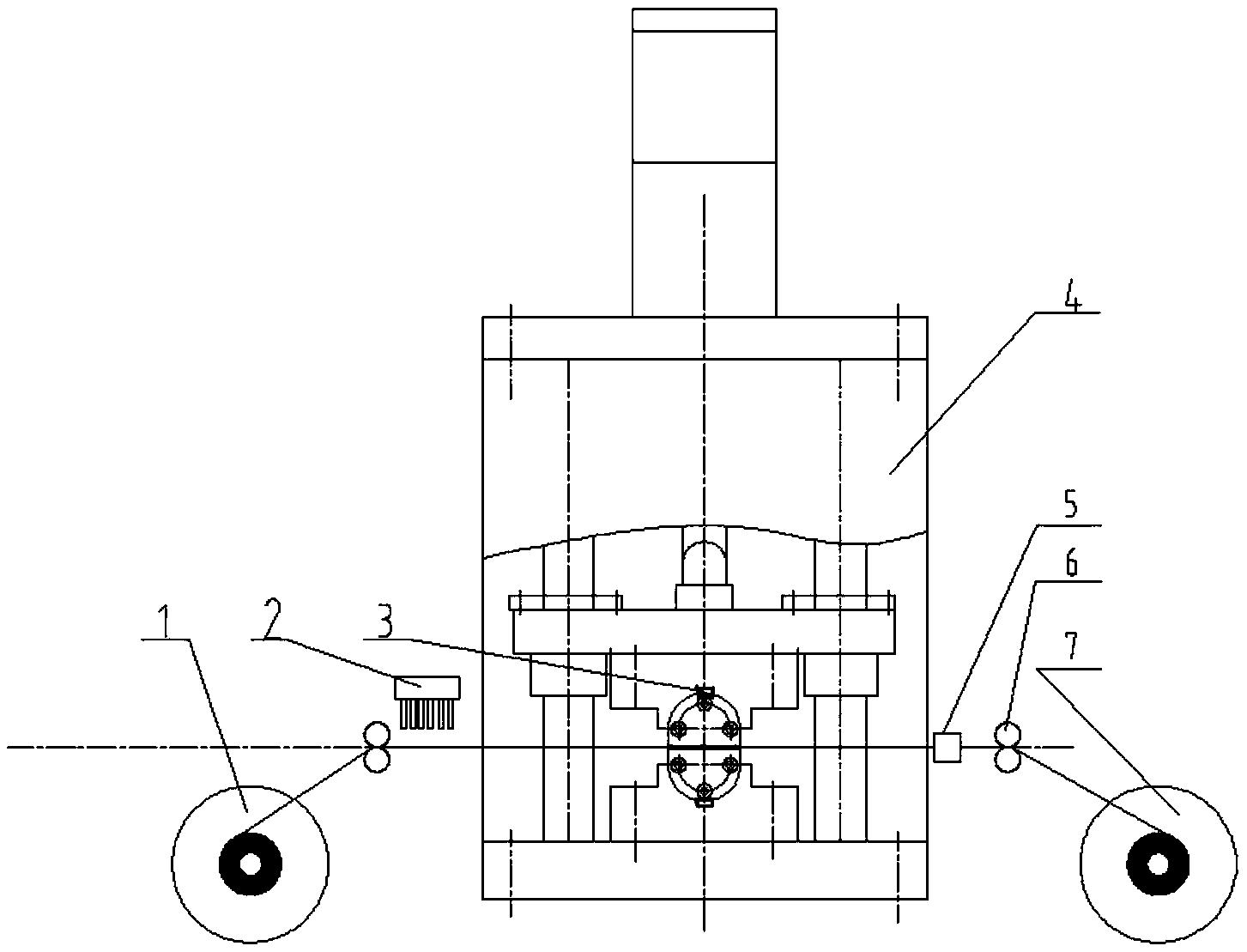
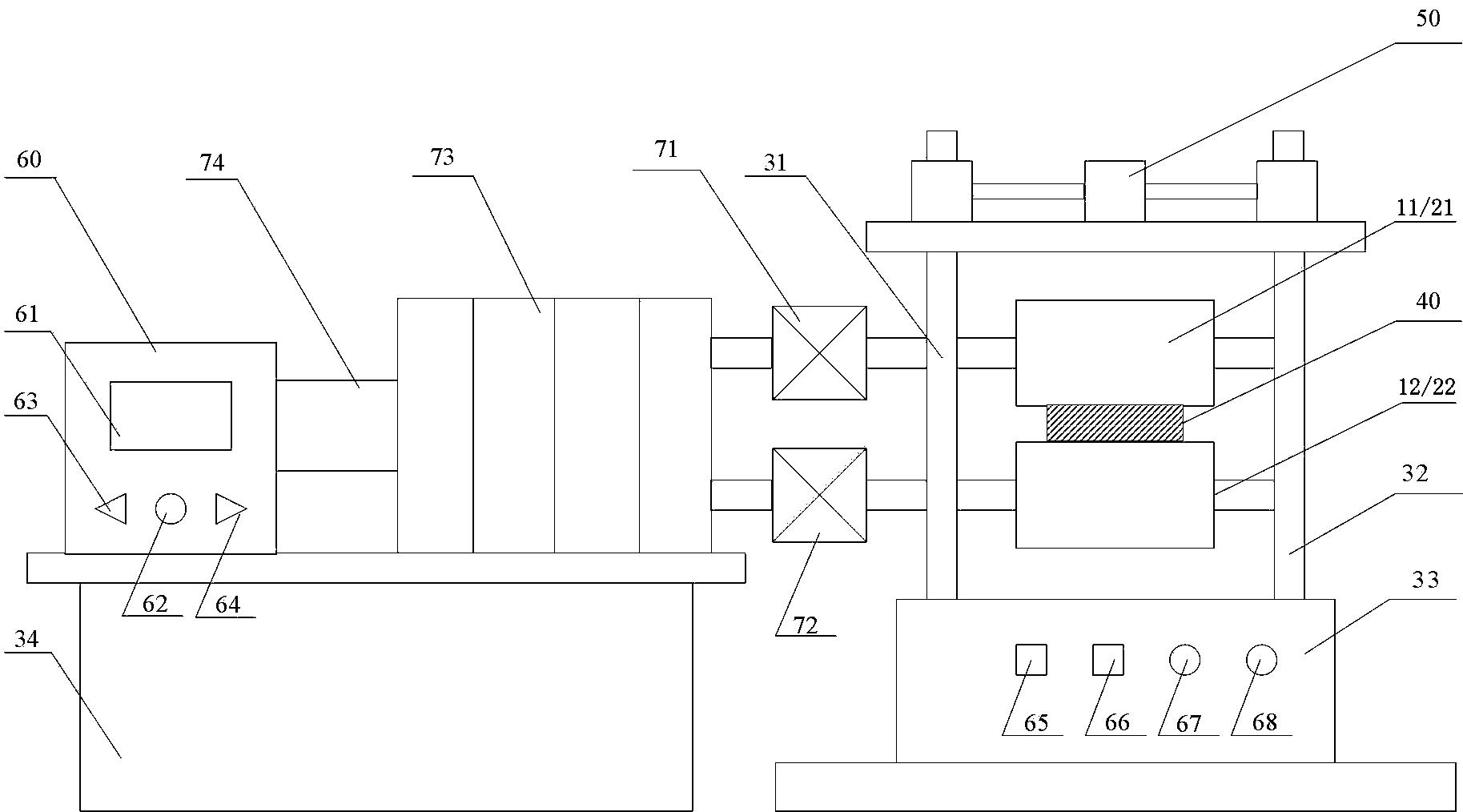
上、下夹送辊均由一台电机通过减速机和万向接轴传动;上夹送辊由2台液压缸驱动摆动;下夹送辊由2台液压缸驱动移动。液压缸采用没有牌坊的液压缸,液压缸内置磁尺。
上、下夹送辊之间的辊缝设置,是根据带钢的厚度由液压控制油缸调整,液压缸设置在夹送辊机架和摆臂上,行程由组合位置传感器控制,该传感器与液压缸组装后整体供货。
上夹送辊通过两台液压缸进行上升和下降运动,根据不同的带钢厚度,上、下夹送辊之间的夹持力是可调的,夹送不同厚度钢板的辊缝由液压缸设定。上夹送辊平衡采用弹簧缸平衡,同时还可消除轴承间隙。上夹送辊采用焊接空心辊体,辊面堆焊耐磨的硬质合金。辊子两端装有双列调心滚动轴承以承受张力,轴承座用螺栓固定在摇臂上。
下夹送辊为固定式。辊身为实心辊,辊面堆焊耐磨的硬质合金。辊子两端装有双列调心滚动轴承以承受张力,轴承座用螺栓固定在机架上。
机架为钢板焊接结构,传动侧和操作侧机架片由厚钢板制做,两片机架用横梁连接,在安装下夹送辊的表面装有耐磨衬板。
卷前上、下夹送辊分别由两个伺服阀控制,分别通过两边的有杆腔、无杆腔压力传感器以及两侧磁尺来实现控制逻辑,一对上下夹送辊的相关技术数据如下:
上夹送辊尺寸:φ900x1500mm
下夹送辊尺寸:φ500x1500mm
辊面线速度:Max.5m/s
上辊摆动缸:Φ180/Φ125x580,16MPa,200mm/s,2台(传动侧、操作侧各一台)
下辊横移缸:Φ125/Φ90x280,16MPa,50mm/s,2台(传动侧、操作侧各一台)
下辊压紧缸:Φ125/Φ100x20,16MPa,10mm/s,2台(传动侧、操作侧各一台)
传动电机:AC150kW,0~1000~1730rpm,380V,2台(上、下辊各一台)
夹送辊液压缸伺服阀:MOOG D661带反馈,输入±10mA,输出4-20mA
夹送辊位移传感器:MTS RHM0630MP101S1G5100磁环:201542
各电气设备的型号如表1所示:
表1
本实施例中,根据现场要求配置PLC,共使用2套西门子公司的SIMATIC TDC、1套S7-400PLC:
1)压下控制系统采用西门子高性能TDC系统,包括2块CPU551,主要完成卷取区卷筒、助卷辊、夹送辊等的压下位置闭环控制、踏步及短行程控制等。
主框架包括模板如下:
RACK:TDC机架
CPU:中央处理单元
CP51M1:工业以太网通讯模块
CP50M1:PROFIBUS-DP网通讯模块
SM500:输入输出模块
ET-200M远程站:
PS307:框架电源模板
IM153:总线接口单元
DI:开关量输入模板
DO:开关量输出模板
2)主令控制系统采用西门子S7-400系列PLC,CPU414-2主要完成卷取区张力、主令速度包含夹送辊、卷径计算、各辅助站之间通讯连锁等逻辑控制。
主框架包括模板如下:
PS:电源模板
CPU:中央处理单元
TCP:工业以太网通讯模块
FM450-1:增量脉冲输入模块
ET-200M:远程站
PS307:框架电源模板
IM153:总线接口单元
SM338:绝对值脉冲输入模板
FM350-2:增量编码器输入模板
AI:模拟量输入模板
AO:模拟量输出模板
DI:开关量输入模板
DO:开关量输出模板
本发明通过在下夹送辊安装两个液压缸来驱动下夹送辊移动,使得下夹送辊能够通过液压系统快速响应。本发明的全连续热轧薄带线中,经过轧机的带钢可以进入1#卷取机进行自动卷取,也可以进入2#卷取机进行自动卷取。根据工艺要求,带钢头部经过轧机后,由于带钢头部不稳定、带钢头部厚度不均匀以及带钢头部板型等很难控制,必须选择飞剪切头,切头后的废料运入废料斗,还没有进入卷取机之前的新的带钢头部即为第一块钢带钢头部,因为飞剪距离1#卷取机的距离较短,比飞剪距离2#卷取机距离短很多,1#下夹送辊的切换时间不能满足运输的废料与要进入1#卷取机的第一块钢带钢头部拉开一定距离的时间,即第一块钢无法成功进入1#卷取机,所以第一块钢必须先进入2#卷取机进行卷取。当2#卷取机正在卷钢,并且计算的钢卷重量超过设定卷重H2时,启动飞剪自动剪切功能,剪切后的新的带钢头部进入1#卷取机卷取;当1#卷取机内的钢卷重量达到设定卷重H1时,启动飞剪自动剪切功能,剪切后的新的带钢头部进入2#卷取机卷取,以此类推,两台卷取机切换卷钢。为保证卷型和切换的稳定性,本发明的全连续热轧薄带线中卷前夹送辊的控制需满足:第一块钢进入卷取机前必须为切过头且第一块钢必须进2#卷取机卷钢,这就要求切头后废料必须快速被送入废料斗,为2#卷取机前上下夹送辊动作争取时间,2#卷取机前上下夹送辊动作顺利完成带钢才能够进入2#卷取机;而在切换到1#卷取机之前,1#卷取机前的下夹送辊必须提前打到轧制位,带钢进入1#卷取机前上夹送辊必须摆好位置。可见,废料过任意1台卷取机的夹送辊时,夹送辊动作都需要满足切换动作要求;卷取机分卷时,上、下夹送辊需要快速精准地配合动作以保证带钢顺利切换卷取机,夹送辊动作顺序起着至关重要的作用。
本实施例中,如图2所示,利用本发明的方法对该钢厂全连续热轧薄带线卷前夹送辊进行控制,具体包括下述步骤:
步骤1:废料进入废料斗准备工作
步骤1.1:将1#上夹送辊辊缝打开至大辊缝;
步骤1.2:将1#下夹送辊通过液压缸位置环控制切换到切换位置;
步骤1.3:将2#上夹送辊辊缝打开至大辊缝;
步骤1.4:将2#下夹送辊切换到切换位置;
步骤1.5:飞剪后所有辊道加速至带钢速度的2~4倍;
其中,所述大辊缝为大于带钢厚度的辊缝。本实施例中,大辊缝为90mm。
带钢通过轧机之前,带钢要通过1#夹送辊进入2#卷取机,必须将1#上夹送辊先打开到大于带钢厚度的辊缝,1#下夹送辊需要横移到切换位置,才能保证带钢头部与剪切掉的废料顺利通过1#夹送辊位置。带钢在飞剪切头之后,为将切头后废料顺利带入废料斗,飞剪后所有辊道加速至带钢速度的2~4倍,同时2#上夹送辊需打开到大于带钢厚度的辊缝,2#下夹送辊切换到切换位置。
步骤2:废料进入废料斗后,2#卷取机卷钢准备
当开轧第一卷钢时,带钢头部经过轧机到达飞剪位置后,飞剪根据设定好的切头长度切头后,根据剪切完成信号启动带钢头部位置跟踪的开始,跟踪位置到达S0位置时,飞剪后所有辊道速度改为正常超前速度,2#下夹送辊由切换位置定位到轧制位置,2#下夹送辊定位完成后,2#上夹送辊下压摆位到初始辊缝;
当开轧非第一卷钢时,1#卷取机正在卷钢,若1#卷取机的卷重到达设定卷重,飞剪自动剪切开始,飞剪剪切完成后,根据剪切完成信号启动带钢头部位置跟踪的开始,跟踪位置到达S0位置时,飞剪后所有辊道速度改为正常超前速度,2#下夹送辊由切换位置定位到轧制位置,2#下夹送辊定位完成后,2#上夹送辊下压摆位到初始辊缝;
其中,S0为以飞剪为基准2#上夹送辊、2#下夹送辊动作时序可完成的位置,S0=S1-(T1+T2)V,S1为飞剪与2#夹送辊之间的距离,V为带钢速度,T1为2#下夹送辊的横移时间,T2为2#上夹送辊落下由大辊缝定位到初始辊缝的时间;所述初始辊缝为带钢厚度的0.92~0.98倍;所述正常超前速度为带钢速度的1.05~1.1倍。
步骤3:切换到1#卷取机卷钢
步骤3.1:2#卷取机建张后,以建张信号为启动信号,控制2#上夹送辊由位置闭环控制切换为压力闭环控制。此外,2#上夹送辊切换为压力闭环控制的条件也可为以步骤2中飞剪剪切完成信号为启动信号的带钢头部跟踪位置到达设定阈值。
步骤3.2:2#卷取机建张后,1#下夹送辊由切换位置定位到轧制位置。
步骤3.3:2#卷取机计算卷重到达设定卷重阈值后飞剪剪切,飞剪剪切完成后,2#卷取机的卷筒加速,卷筒加速期间2#卷取机内的带钢尾部跟踪位置过1#夹送辊位置时,1#上夹送辊下压摆位到初始辊缝。
步骤3.4:飞剪分切后,当2#卷取机夹送辊前热检检失时,控制2#上夹送辊由压力闭环控制切换为位置闭环控制,同时2#上夹送辊摆位到初始辊缝。
步骤3.5:带钢头部顺利进入1#卷取机并且1#卷取机建张后,为保证下卷分卷时间充分,,1#上夹送辊切换为压力闭环控制紧贴于1#下夹送辊辊面上方,以保证夹送辊与卷取机之间的带钢一直存在张力,提高卷型质量。此外,1#上夹送辊切换为压力闭环控制的条件也可为以步骤3.3中飞剪剪切完成信号为启动信号的带钢头部跟踪位置到达设定阈值。
步骤3.6:1#卷取机建张同时1#上夹送辊切换为压力闭环控制后,1#下夹送辊切换到切换位置。
步骤4:切换成2#卷取机卷钢
步骤4.1:1#卷取机计算卷重到达设定卷重阈值时,飞剪剪切开始分卷;
步骤4.2:飞剪剪切完成后,为将分切后的带钢拉开距离,1#卷取机的卷筒加速,以飞剪剪刃垂直于接触带钢时为带钢尾部跟踪开始时机,带钢尾部跟踪位置过1#夹送辊位置时,1#上夹送辊由压力闭环控制转换为位置闭环控制,1#上夹送辊摆位到大辊缝。
步骤5:若轧机连续轧制,则转至步骤2,循环进行自动控制;若轧机没有钢且轧线上热检信号全部消失,则转至步骤1。
本发明通过对两对卷前夹送辊动作的精确控制,使得废料过任意1台卷取机的夹送辊时夹送辊动作都能够满足切换动作要求,卷取机分卷时上、下夹送辊都能够快速精准地配合动作以保证带钢顺利切换卷取机,保证了卷型和高速切换的稳定性,解决了现有卷前夹送辊控制方法中存在的通过气动活门控制选择卷取机导致不能满足高速切换要求的技术问题。
显然,上述实施例仅仅是本发明的一部分实施例,而不是全部的实施例。上述实施例仅用于解释本发明,并不构成对本发明保护范围的限定。基于上述实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,也即凡在本申请的精神和原理之内所作的所有修改、等同替换和改进等,均落在本发明要求的保护范围内。
一种全连续热轧薄带线卷前夹送辊的控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0