









专利摘要
本发明公开了一种复合驱动式弹簧耦合型主动铰接拖挂机器人,包括:一个牵引机器人和多个拖挂机器人,所述牵引机器人通过带有弹簧的铰接方式或带有转向电机的主动转向铰接方式与拖挂机器人连接,多个拖挂机器人之间通过带有弹簧的铰接方式或带有转向电机的主动转向铰接方式连接。本发明结构简单,易于实现,可以有效提高拖挂机器人的转向灵活性和柔顺性,使其被动转向变成主动转向,从而增加其在非结构化环境下的避障能力。
权利要求
1.一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,包括:一个牵引机器人和多个拖挂机器人,所述牵引机器人通过带有弹簧的铰接方式或带有转向电机的主动转向铰接方式与拖挂机器人连接,多个拖挂机器人之间通过带有弹簧的铰接方式或带有转向电机的主动转向铰接方式连接。
2.根据权利要求1所述一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,所述带有弹簧的铰接方式,包括牵引座a、牵引杆a、牵引销a和卷簧;所述牵引座a固定在牵引机器人或拖挂机器人后方,所述卷簧内端与牵引座a固定连接,外端与牵引杆a的一端处的卡槽固定连接,牵引杆a的另一端与拖挂机器人连接,所述牵引销a用来连接牵引杆a和牵引座a。
3.根据权利要求1所述一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,带有转向电机的主动转向铰接方式,包括牵引座b、牵引杆b、牵引销b和转向电机;所述牵引座b固定在牵引机器人或拖挂机器人后方,所述转向电机与牵引座b固定连接,所述牵引销b通过其外齿与牵引杆b的一端啮合相连,所述牵引销b通过其内齿与转向电机的转轴啮合连接,所述牵引杆b的一端通过牵引销b与牵引座b相连,牵引杆b的另一端与拖挂机器人连接。
4.根据权利要求2或3所述一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,牵引座a或牵引座b中均安装有卷簧或转向电机。
5.根据权利要求2或3所述一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,所述牵引座a与牵引座b在同一水平、垂直线上。
6.根据权利要求2或3所述一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,所述牵引机器人内设有控制模块,所述控制模块用于输出转矩。
7.根据权利要求6所述一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,转向电机在避障转向过程中的控制过程如下:
拖挂机器人遇到障碍时,转向电机接收来自控制模块输出的转矩,转矩通过牵引销b传递到牵引杆b上带动拖挂机器人转动一定的角度,然后角度传感器实时把拖挂机器人之间的铰接角大小传递到控制模块中,控制模块不停的输出转矩信号,直到铰接角到达期望的角度,所述角度传感器安装牵引座b旁。
8.根据权利要求6所述一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,卷簧在避障转向过程中起到的控制作用如下:
拖挂机器人遇到障碍物,当牵引机器人转动的角度较小时,由于卷簧的缓冲作用拖挂机器人仍然保持稳定前进;当牵引机器人突然转向或转动角度过大时,由于卷簧的作用,带动其后方与牵引座a铰接的牵引杆a随着转动,使拖挂机器人与牵引机器人始终保持一个较小的铰接角,从而避免拖挂机器人与障碍物相撞。
9.根据权利要求6所述一种复合驱动式弹簧耦合型主动铰接拖挂机器人,其特征在于,卷簧和转向电机组合安装在同一个牵引座a或牵引座b上,当拖挂机器人遇到障碍物时,转动角度较小时卷簧起到保证稳定前进的作用,或者突然转向时卷簧起到缓冲的作用,此时转向电机不工作;当转向角度较大时卷簧不工作,转向电机输出力矩控制小车转向到期望的铰接角。
说明书
技术领域
本发明涉及一种拖挂机器人,具体说是一种复合驱动式弹簧耦合型主动铰接拖挂机器人。
背景技术
拖挂机器人在面临复杂多变的多障碍环境时,常需要拖挂机器人执行灵活机动的转向,同时当与障碍物碰撞时,还要求拖挂机器人能够迅速恢复姿态,这些都对拖挂机器人的转向操控性能提出了较高的要求。然而,现有的拖挂机器人在行驶时,控制拖挂机器人位置和姿态的力完全来自于牵引机器人传递的挂钩牵引力,在克服地面附着力的条件下实现挂车左右轮之间的差速而达到转向目的,由于挂钩牵引力不具有力矩的形式,在这种情况下实现拖挂机器人的转向操纵是一项极具挑战的任务。现有的解决方法是通过选择较好的控制方法达到预期的转向效果。
但是这样的解决方法有以下两方面的不足:1)在跟踪期望轨迹时,挂钩牵引力的作用形式和方向会发生频繁变换,机器人极易受到外界干扰力的影响而迅速偏离预定轨迹。2)这种单纯依赖动态耦合力的方式还存在奇异点问题,当相邻的两拖挂机器人呈垂直状态时,机器人则完全失去转向能力。
发明内容
为了克服现有技术中存在的不足,本申请提供了一种复合驱动式弹簧耦合型主动铰接拖挂机器人,解决了拖挂机器人在面对复杂多变的多障碍环境时容易发生碰撞、碰撞后无法快速恢复姿态、折叠等问题。
为实现上述目的,本申请采用的第一种技术方案是:一种复合驱动式弹簧耦合型主动铰接拖挂机器人,包括:一个牵引机器人和多个拖挂机器人(2个以上),所述牵引机器人通过带有弹簧的铰接方式或带有转向电机的主动转向铰接方式与拖挂机器人连接,多个拖挂机器人之间通过带有弹簧的铰接方式或带有转向电机的主动转向铰接方式连接。
进一步的,所述带有弹簧的铰接方式,包括牵引座a、牵引杆a、牵引销a和卷簧;所述牵引座a固定在牵引机器人或拖挂机器人后方,所述卷簧内端与牵引座a固定连接,外端与牵引杆a的一端处的卡槽固定连接,牵引杆a的另一端与拖挂机器人连接,所述牵引销a用来连接牵引杆a和牵引座a。
进一步的,带有转向电机的主动转向铰接方式,包括牵引座b、牵引杆b、牵引销b和转向电机;所述牵引座b固定在牵引机器人或拖挂机器人后方,所述转向电机与牵引座b固定连接,所述牵引销b通过其外齿与牵引杆b的一端啮合相连,所述牵引销b通过其内齿与转向电机的转轴啮合连接,所述牵引杆b的一端通过牵引销b与牵引座b相连,牵引杆b的另一端与拖挂机器人连接。
进一步的,所述牵引座a或牵引座b中均安装有卷簧或转向电机。
进一步的,所述牵引座a与牵引座b在同一水平、垂直线上。
进一步的,所述牵引机器人内设有控制模块,所述控制模块,包括环境感知器、轨迹规划器、计算单元;所述环境感知器用来感知障碍物的具体位置和周围环境,所述轨迹规划器用来规划出可行的路线,所述计算单元用来计算出轨迹的曲率和能快速安全通过障碍物的最佳铰接角的大小。
更进一步的,转向电机在避障转向过程中的控制过程如下:
拖挂机器人遇到障碍时,转向电机接收来自控制模块输出的转矩,转矩通过牵引销b传递到牵引杆b上带动拖挂机器人转动一定的角度,然后角度传感器实时把拖挂机器人之间的铰接角大小传递到控制模块中,控制模块不停的输出转矩信号,直到铰接角到达期望的角度,所述角度传感器安装牵引座b旁。
更进一步的,卷簧在避障转向过程中起到的控制作用如下:
拖挂机器人遇到障碍物,当牵引机器人转动的角度较小时,由于卷簧的缓冲作用拖挂机器人仍然保持稳定前进;当牵引机器人突然转向或转动角度过大时,由于卷簧的作用,带动其后方与牵引座a铰接的牵引杆a随着转动,使拖挂机器人与牵引机器人始终保持一个较小的铰接角,从而避免了拖挂机器人与障碍物相撞。
更进一步的,卷簧和转向电机组合安装在同一个牵引座a或牵引座b上,当拖挂机器人遇到障碍物时,转动角度较小时卷簧起到保证稳定前进的作用,或者突然转向时卷簧起到缓冲的作用,此时转向电机不工作;当转向角度较大时卷簧不工作,转向电机输出力矩控制小车转向到期望的铰接角。
本发明由于采用以上技术方案,能够取得如下的技术效果:1、本发明机械结构简单、成本低,因此可以批量生产。2、本发明主动转向机构所采用的弹簧和电机技术成熟,种类繁多,因此可以应用到各种带有挂车的拖挂机器人或者拖挂车系统中,从而得到更加广泛的应用。3、本发明由于采用了卷簧,减少了两个机器人在转弯或避障的时候的震动,增加了整体的转向柔顺性,又由于卷簧限制了其转角的大小保证了的高效准确转向。还由于采用了电机主动转向,保证的后面一个机器人与前方机器人保持期望的角度从而使整个拖挂机器人以最佳的姿态快速通过弯道或避过障碍物,很大程度上提高了拖挂机器人的柔顺性和通过性能。
附图说明
本发明共有附图3幅:
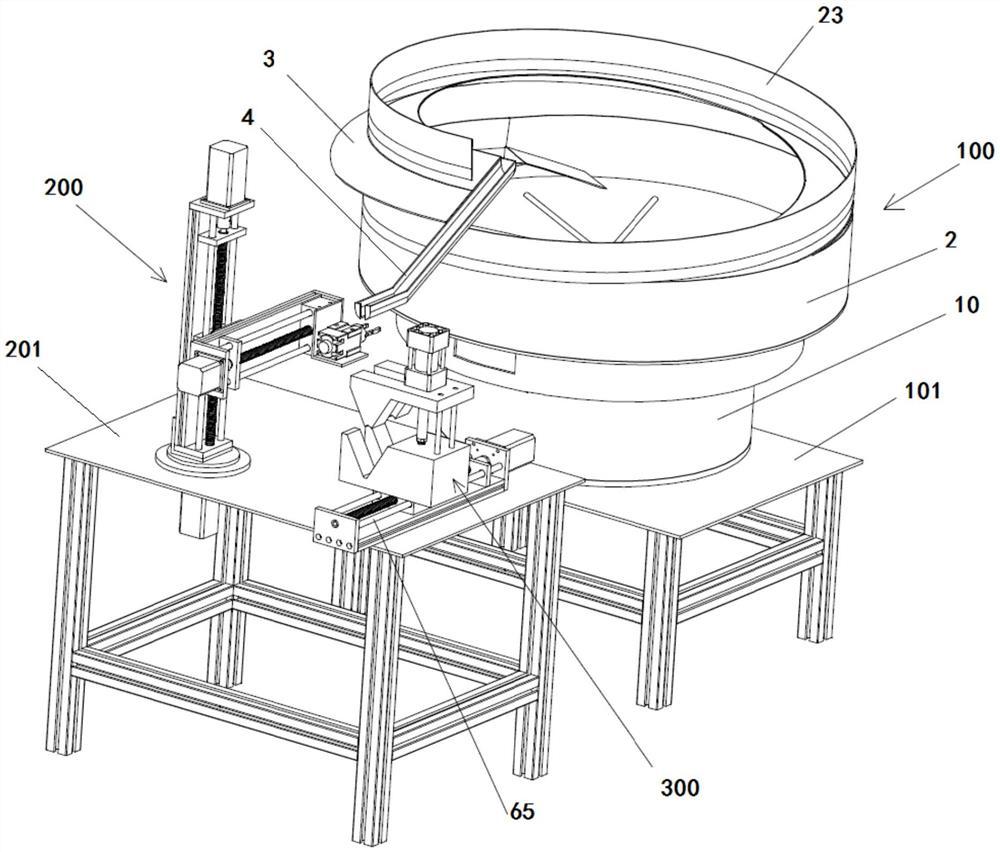
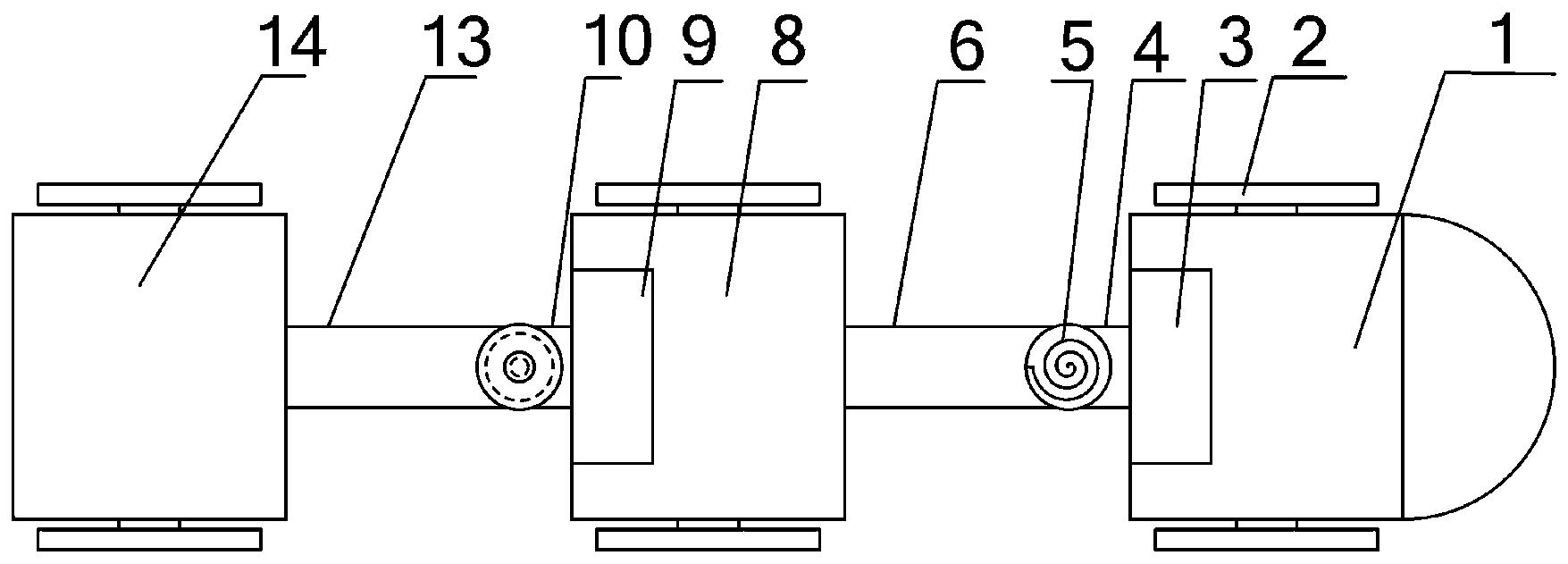
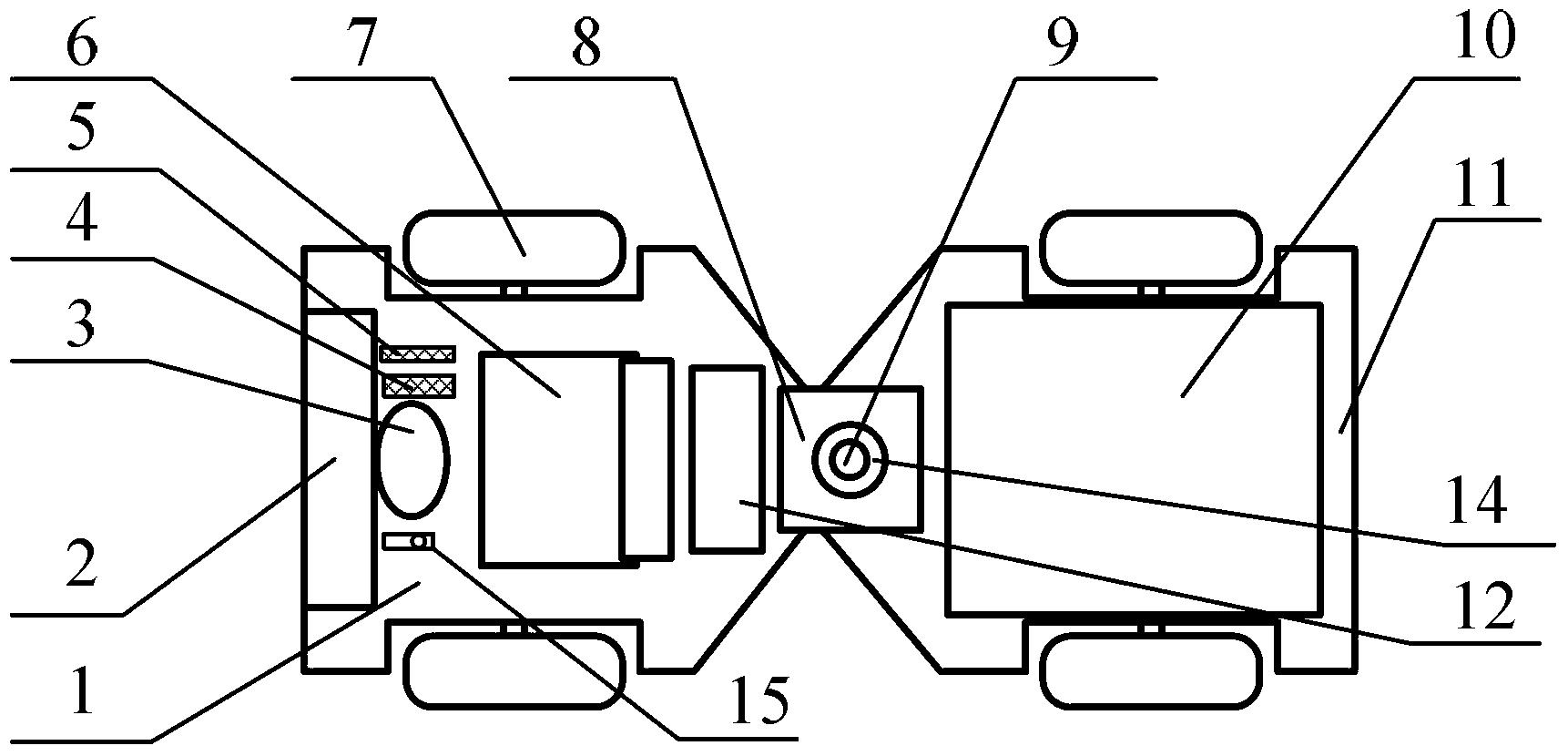
图1为本申请实施例1的俯视图;
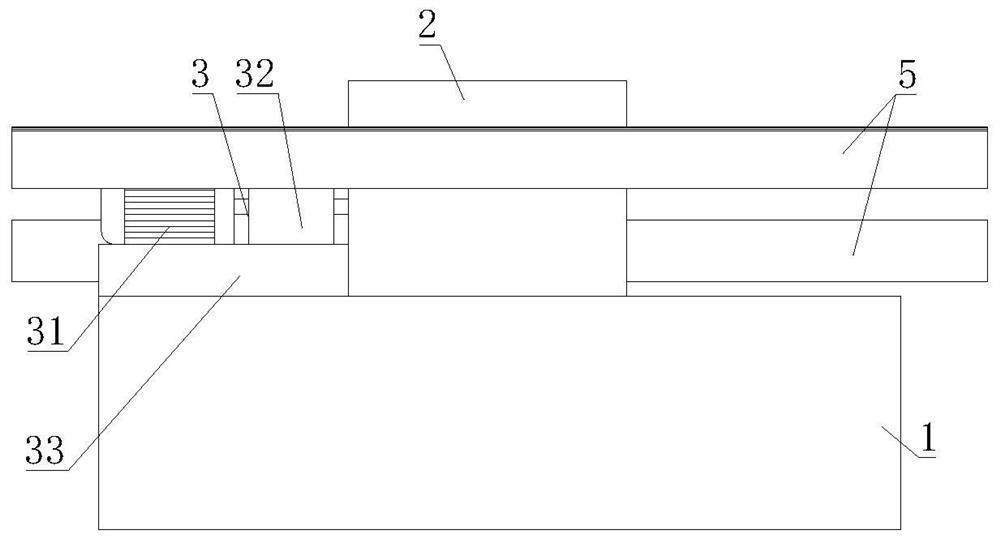
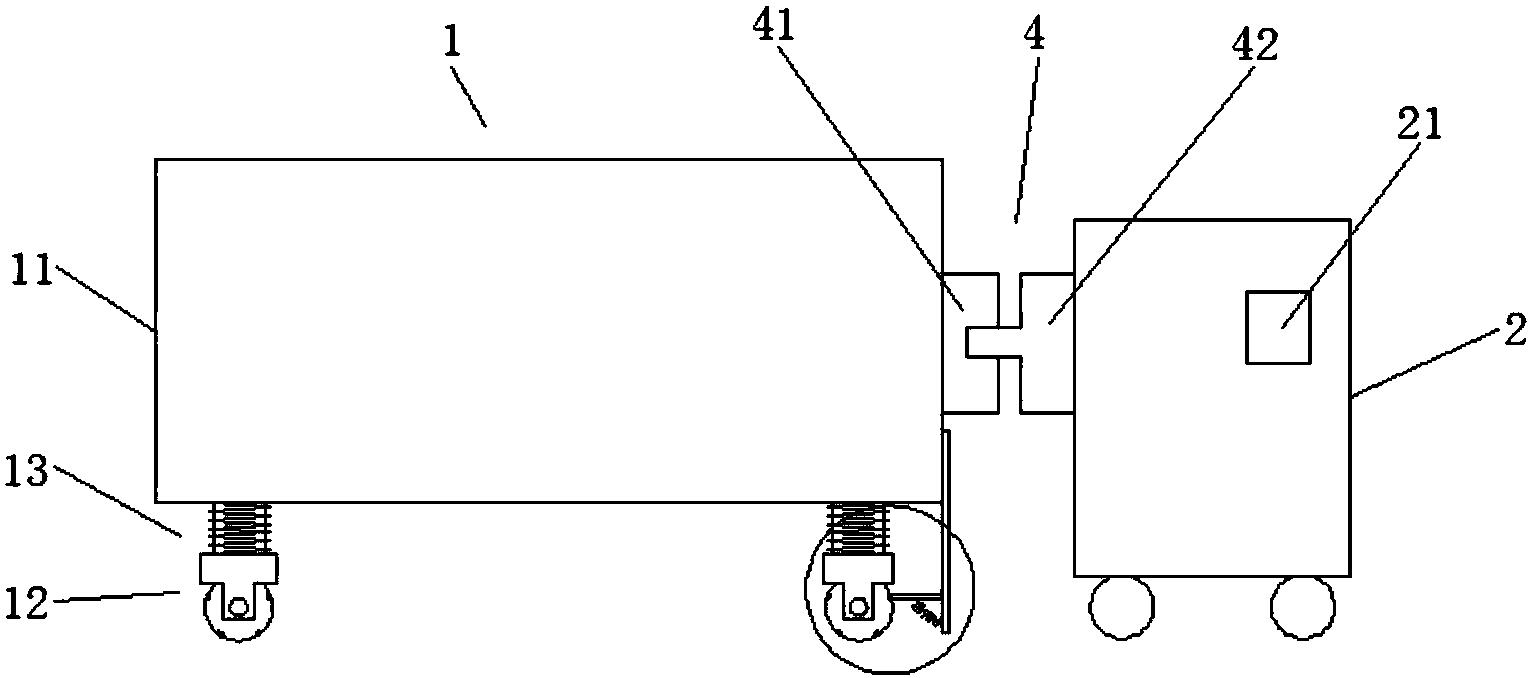
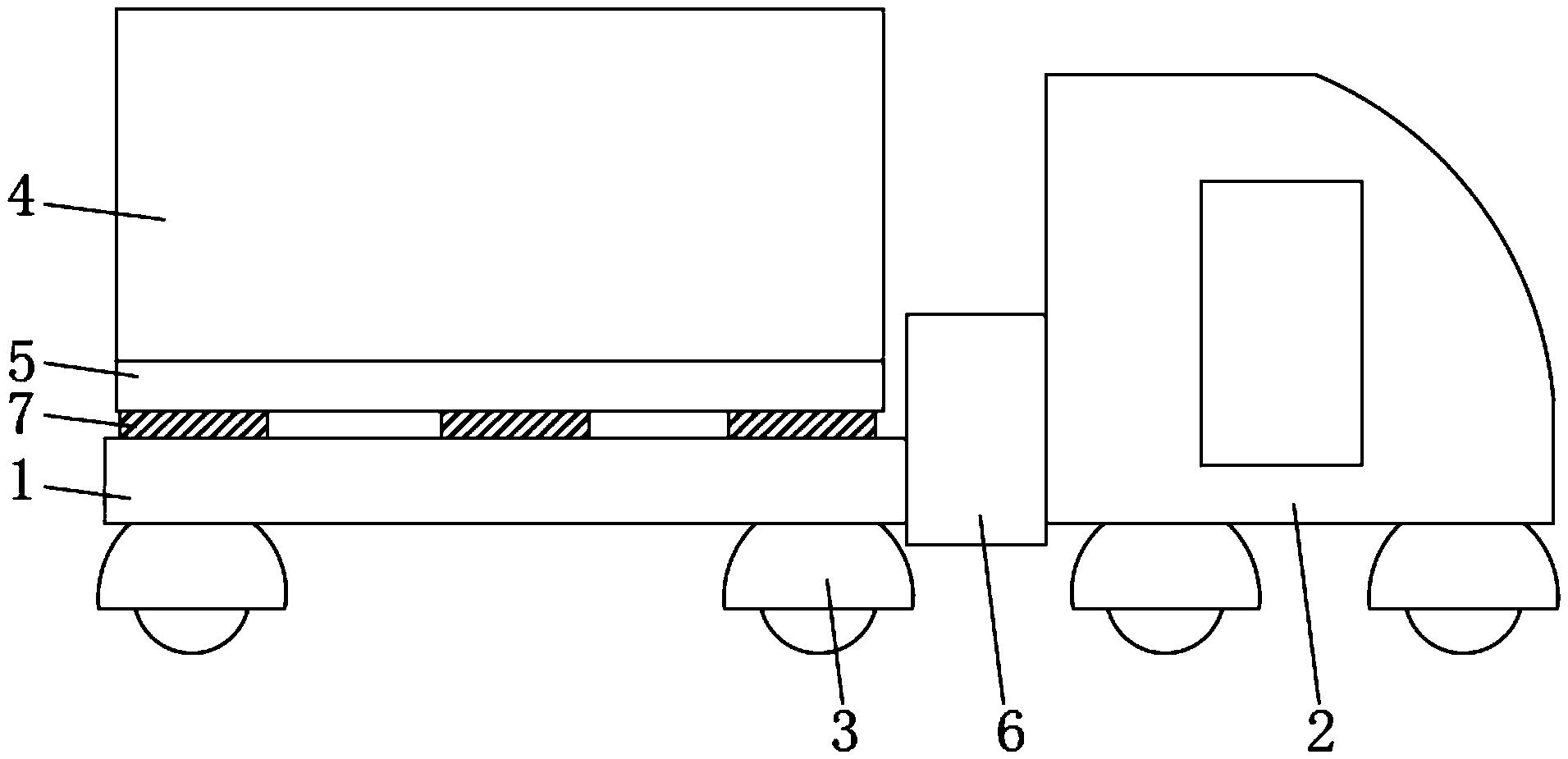
图2为本申请实施例1的侧视图;
图3为主动式控制流程图。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
本申请还有另一种表述方式:以有两个拖挂机器人进行说明,具体如下:
一种复合驱动式弹簧耦合型主动铰接拖挂机器人,包括:一个牵引机器人和两个拖挂机器人,所述牵引机器人后方固定有牵引座a,牵引杆a的一端通过牵引销a与牵引座a相连,牵引杆a的另一端与第一个拖挂机器人固定连接,所述第一个拖挂机器人后方固定安装有牵引座b,所述牵引座b通过牵引销和牵引杆b的一端连接,所述牵引杆b的另一端与第二个拖挂机器人连接。
优选的,所述牵引座a中设有连接牵引杆a与牵引座a的卷簧和/或直流转向电机。
优选的,所述牵引座b中设有直流转向电机和/或连接牵引杆b与牵引座b的卷簧。
实施例1
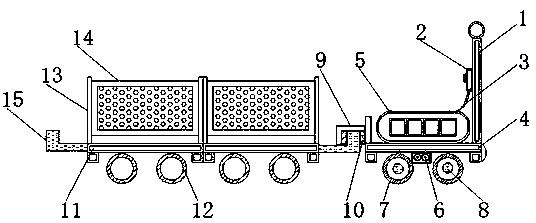
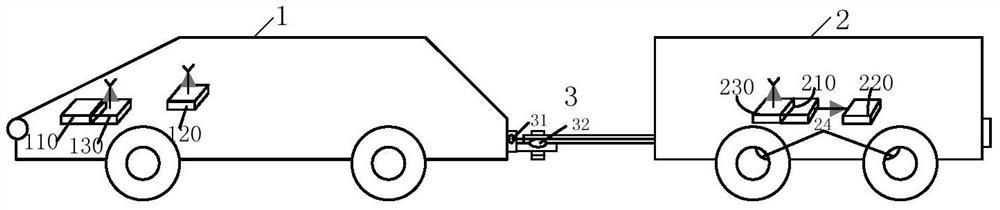
本实施例提供一种复合驱动式弹簧耦合型主动铰接拖挂机器人,包括牵引机器人的车体1,车体两侧安装驱动轮2,所述驱动轮2带有轮毂电机,在车体1上设有控制模块3,牵引座4在牵引机器人的后方用来安装固定卷簧5,牵引杆6的一端通过牵引销7铰接到牵引座上,并且卷簧的外端延伸固定到牵引杆的卡槽里的,从而保证了牵引杆可以在牵引座上受到卷簧限制的情况下左右转动。拖挂机器人8结构和牵引机器人相同但是左右轮不带有驱动电机,拖挂机器人8通过牵引杆6与牵引机器人相连。牵引座10固定安置在拖挂机器人8后方,位置与牵引座4保持在一条线上,转向电机11固定在牵引座10的中间,电机的转轴带有外齿,牵引杆13的一端通过牵引销12连接到牵引座上,并且牵引销12带有用来和牵引杆13、转向电机11转轴相啮合的齿轮,从而保证了可以通过转向电机带动牵引杆13转动固定的角度,在牵引座10上还安装有用来测量转角的角度传感器9,牵引杆13的另一端连接拖挂机器人14,拖挂机器人14与拖挂机器人8的结构完全相同。
控制模块3包括环境感知器,轨迹规划器,计算单元和电源机构;所述环境感知器用来感知障碍物的具体位置和周围的其它环境,所述轨迹规划器用来规划出可行的路线,所述计算单元用来计算出轨迹的曲率和可以快速安全通过障碍物的最佳铰接角的大小,角度传感器用来测量铰接角的大小,转向电机用来提供所需的转矩。牵引杆和拖挂机器人转动一定的角度,然后角度传感器实时把机器人间的铰接角大小传递到控制模块中,控制模块不停的输出转矩信号,直到铰接角到达期望的角度。
实施例2
本实施例提供一种转向电机在避障转向过程中的控制过程,如下:
拖挂机器人遇到障碍时,转向电机接收来自控制模块输出的转矩,转矩通过牵引销b传递到牵引杆b上带动拖挂机器人转动一定的角度,然后角度传感器实时把拖挂机器人之间的铰接角大小传递到控制模块中,控制模块不停的输出转矩信号,直到铰接角到达期望的角度,所述角度传感器安装牵引座b旁。
控制过程中转向电机的力矩可由以下公式确定:
M-Ft2L2=J2α(1)
J2=m3R2(2)
式中M为转向电机的力矩,Ft2为拖挂机器人14受到的侧向摩擦力,L2为轮子和地面的接触点到牵引座中心的距离,J2为拖挂机器人14绕牵引座转动的转动惯量,α为转动时设置的角加速度,m3为拖挂机器人14的质量, 分别为拖挂机器人14和拖挂机器人8之间的期望铰接角和实际铰接角,R为拖挂机器人质心到铰接点的距离,t为铰接角从实际大小变到期望大小所用的时间。综上可知,转向电机的输出力矩为:
实施例3
本实施例提供一种卷簧在避障转向过程中起到的控制作用,如下:
拖挂机器人遇到障碍物,当牵引机器人1转动的角度较小时,由于卷簧5的缓冲作用拖挂机器人8仍然保持稳定前进,避免了当牵引机器人1连续小角度摆动时拖挂机器人8的抖动现象发生;当牵引机器人1突然转向或转动角度过大时,由于卷簧5的作用,带动其后方与牵引座4铰接的牵引杆6随着转动,使拖挂机器人8与牵引机器人1始终保持一个较小的铰接角,从而保证了拖挂机器人能够快速通过避免当转向半径过小时拖挂机器人8与障碍物相撞。
对于卷簧的选择可结合拖挂机器人的质量由以下公式确定:
T=M+m2R2+Ft1L1(6)
式中,T是卷簧保持拖挂机器人在一定角度内转动所需的转矩,l表示卷簧工作圈的展开长度,E表示卷簧材料的弹性模量,I表示卷簧材料截面的惯性矩,Ft1为拖挂机器人8受到的侧向摩擦力,L1为轮子和地面的接触点到牵引座4中心的距离,m2为拖挂机器人8的质量, 别为拖挂机器人8和拖挂机器人1之间的实际铰接角。
实施例4
本实施例提供另一种安装方式,即卷簧和转向电机组合安装在一个牵引座上,这样当拖挂机器人遇到障碍物时,转动角度较小时卷簧起到保证稳定前进的作用,或者突然转向时卷簧起到缓冲的作用,避免拖挂机器人与牵引机器人垂直而失去转向作用,此时转向电机不工作;当转向角度较大时弹簧不工作,转向电机输出力矩控制小车转向到期望的铰接角。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
一种复合驱动式弹簧耦合型主动铰接拖挂机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0