

IPC分类号 : B63B9/00I,B62D57/024I,B63B59/10I,B05B13/00I








专利摘要
本发明公开了一种用于巨型船体多功能加工的自适应牵引爬壁机器人,涉及机器人领域,包括牵引动力模块、制动行走底盘模块、传感器模块和工具对接模块。其中,牵引动力模块与大型部件固定,制动行走底盘模块通过绳索与牵引动力模块连接,传感器模块和工具对接模块均安装在制动行走底盘模块上。本发明能够适用大型船段壁面的工作任务,又能根据实际需求进行修形切割、喷涂和清洗等功能的更换,降低了人工作业的强度和危险性,且作业速度快、精度高,缩短了工期。
权利要求
1.一种用于巨型船体多功能加工的自适应牵引爬壁机器人,其特征在于,包括牵引动力模块、制动行走底盘模块、传感器模块和工具对接模块;其中,所述牵引动力模块与大型部件固定,所述制动行走底盘模块通过绳索与所述牵引动力模块连接,所述传感器模块和所述工具对接模块均安装在所述制动行走底盘模块上;
所述牵引动力模块包括:上约束导轨、下约束导轨、上滑块、下滑块、上电动卷绕盘、下电动卷绕盘、被动卷绕盘、绳索、牵引连接扣、动力约束扣、动力信号线和横栏,所述上约束导轨固定在巨型船段的上方,所述下约束导轨固定在船段的地面,所述上滑块安装在所述上约束导轨上,所述下滑块安装在所述下约束导轨上;
所述上电动卷绕盘和所述被动卷绕盘与所述上滑块连接,所述下电动卷绕盘与所述下滑块连接,所述被动卷绕盘上盘绕着所述动力信号线;
所述制动行走底盘模块包括:磁性底板、轮式底板、被动轮、弹性连接铰、电磁基体、侧板、阻尼合页、中间板和橡胶弹簧;
所述磁性底板和所述轮式底板之间通过所述弹性连接铰相互连接,所述被动轮安装在所述轮式底板上,所述电磁基体固定在所述磁性底板上;
所述轮式底板和所述磁性底板组合成一体,与所述中间板通过所述阻尼合页连接,所述中间板作为所述传感器模块和所述工具对接模块的固定处,与所述侧板相互固定;
所述传感器模块包括:固定架、陀螺仪、超声波壁障仪、微型控制板、线缆束线器。
2.如权利要求1所述的用于巨型船体多功能加工的自适应牵引爬壁机器人,其特征在于,所述工具对接模块包括:基座、环段卡箍、预紧顶丝、弹性顶轮和通用工具接头。
3.如权利要求2所述的用于巨型船体多功能加工的自适应牵引爬壁机器人,其特征在于,所述环段卡箍作为锁紧装置,通过所述预紧顶丝调整锁紧力的大小。
4.如权利要求2所述的用于巨型船体多功能加工的自适应牵引爬壁机器人,其特征在于,所述弹性顶轮用于保持所述工具对接模块与船段表面有一定的距离。
说明书
技术领域
本发明涉及机器人领域,尤其涉及一种用于巨型船体多功能加工的自适应牵引爬壁机器人。
背景技术
多功能加工是指该机器人具有通用的工具安装平台,能够换装不同功能的工具头。自适应牵引是指通过绳索牵引和磁吸附的方式,实现爬壁机器人的运动和精准定位。针对巨型船体的人为操作难得问题,设计这种特种装备,具有运动空间跨度大,运动精度高,能够在线作业自动化程度高等优点。
随着我国对海洋事业的投入,对巨型船舶甚至是特大型的船的需求愈加旺盛,进一步带动了船舶制造业的发展。而船舶制造过程中,对初步加工制造好的船段进行切割修形、喷绘检测,往往需要在船坞中搭建高脚手架,进行小范围人工操作。或者吊装操作人员运送至特定高度进行人工操作,耗时费力,且存在安全隐患。这造成了加工区域小,当需要对大船段进行多个位置操作时候,需要反复地拆卸脚手架,这无疑会拖延加工周期。同时,人工操作带来不可避免的加工误差,不利于后期的船段对接工艺。
对现有的技术检索发现,中国专利文献号CN207389348U(公开日:2018-05-22),记载了一种曲面自适应磁吸附爬壁喷漆机器人,包括四个结构相同的永磁吸附式履带轮模块、基于平行四边形机构的车体模块和直角坐标系式喷漆机械臂模块。四个结构相同的永磁吸附式履带轮模块对称布置于车体模块的两侧,在车体模块的上部安装直角坐标系式喷漆机械臂模块。每个履带轮模块均包括导磁板、隔磁板、钕铁硼永磁体、履带轮驱动电机、两个主动轮、同步带、两个同步带轮、两个从动轮、履带轮轴承外端盖、履带轮轴承、履带轮轴承内端盖、履带、主动轮轴、套筒和从动轮轴。导磁板围绕在履带的外表面,刚性连接,在导磁板的中部沿导磁板长度方向均匀布置若干数量的隔磁板。但现有的技术与本申请相比的不足之处在于:受到多条直线模组重量的限制,负载的能力有限,难以对部件的侧面实现大范围作业,机动性明显不强。虽然采用履带式磁铁吸附的方式进行固定,但对于大斜面的工作状态,并不能够很好地适用于大型船段的壁面的工作任务。另外,现有技术装置功能单一,不能根据实际需求进行更换。
因此,本领域的技术人员致力于开发一种可用于对大弧面、高尺寸段的部件进行加工的装置,能够布置在船体的弧面上,通过自适应磁吸附和牵引装置,实现该装置的定位和固定。同时,该装置可以按照加工需求,更换不同功能的作业头,例如:切割头、喷绘头和清洗装置。
发明内容
有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是通过合理设计,获取能适用大型船段壁面的工作任务,又能根据实际需求进行功能更换的装置。
为实现上述目的,本发明提供了一种用于巨型船体多功能加工的自适应牵引爬壁机器人,包括牵引动力模块、制动行走底盘模块、传感器模块和工具对接模块;其中,所述牵引动力模块与大型部件固定,所述制动行走底盘模块通过绳索与所述牵引动力模块连接,所述传感器模块和所述工具对接模块均安装在所述制动行走底盘模块上。
进一步地,所述牵引动力模块包括:上约束导轨、下约束导轨、上滑块、下滑块、上电动卷绕盘、下电动卷绕盘、被动卷绕盘、绳索、牵引连接扣、动力约束扣、动力信号线和横栏,所述上约束导轨固定在巨型船段的上方,所述下约束导轨固定在船段的地面,所述上滑块安装在所述上约束导轨上,所述下滑块安装在所述下约束导轨上。
进一步地,所述上电动卷绕盘和所述被动卷绕盘与所述上滑块连接,所述下电动卷绕盘与所述下滑块连接,所述被动卷绕盘上盘绕着所述动力信号线。
进一步地,所述制动行走底盘模块包括:磁性底板、轮式底板、被动轮、弹性连接铰、电磁基体、侧板、阻尼合页、中间板和橡胶弹簧。
进一步地,所述磁性底板和所述轮式底板之间通过所述弹性连接铰相互连接,所述被动轮安装在所述轮式底板上,所述电磁基体固定在所述磁性底板上。
进一步地,所述轮式底板和所述磁性底板组合成一体,与所述中间板通过所述阻尼合页连接,所述中间板作为所述传感器模块和所述工具对接模块的固定处,与所述侧板相互固定。
进一步地,所述工具对接模块包括:基座、环段卡箍、预紧顶丝、弹性顶轮和通用工具接头。
进一步地,所述环段卡箍作为锁紧装置,通过预紧顶丝调整锁紧力的大小。
进一步地,所述弹性顶轮用于保持所述工具对接模块与船段表面有一定的距离。
进一步地,所述传感器模块包括:固定架、陀螺仪、超声波壁障仪、微型控制板、线缆束线器。
本发明的有益技术效果为:
1、本发明能够适用大型船段壁面的大弧面、高尺寸段的工作任务,降低了人工作业的强度和危险性。
2、本发明在机器人装置上预留通用接口,能根据实际需求进行修形切割、喷涂和清洗等功能的更换,减少了人力成本,提高了加工效率,缩短了加工周期。
3、本发明整体机构精简,且各个部件均为规则形状部件,便于加工制造。
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
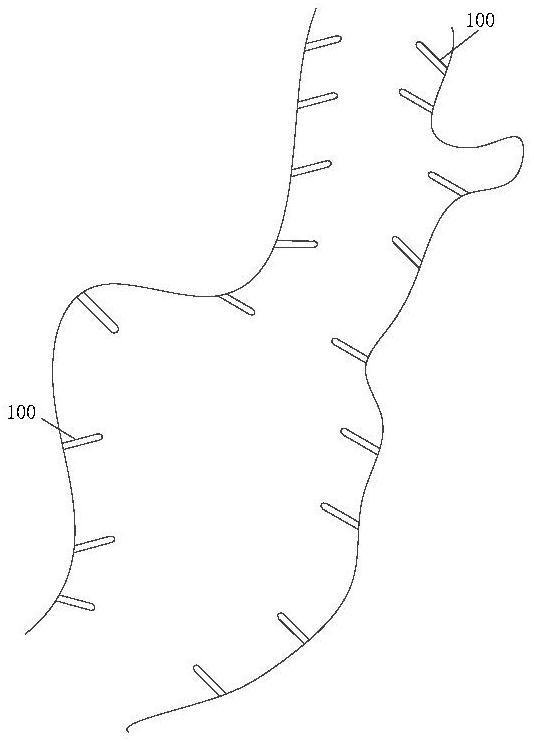
图1是本发明的一个较佳实施例的整体示意图;
图2是本发明的一个较佳实施例的结构图;
图3是本发明的一个较佳实施例的牵引动力模块图;
图4是本发明的一个较佳实施例的制动行走底盘模块、传感器模块和工具对接模块整体结构图。
具体实施方式
以下参考说明书附图介绍本发明的优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
如图1和图2所示,本发明的一个较佳实施例的一种用于巨型船体多功能加工的自适应牵引爬壁机器人,包括:牵引动力模块1、制动行走底盘模块2、工具对接模块3和传感器模块4。牵引动力模块1与大型部件固定,制动行走底盘模块2通过绳索与牵引动力模块1连接,工具对接模块3和传感器模块4均安装在制动行走底盘模块2上。
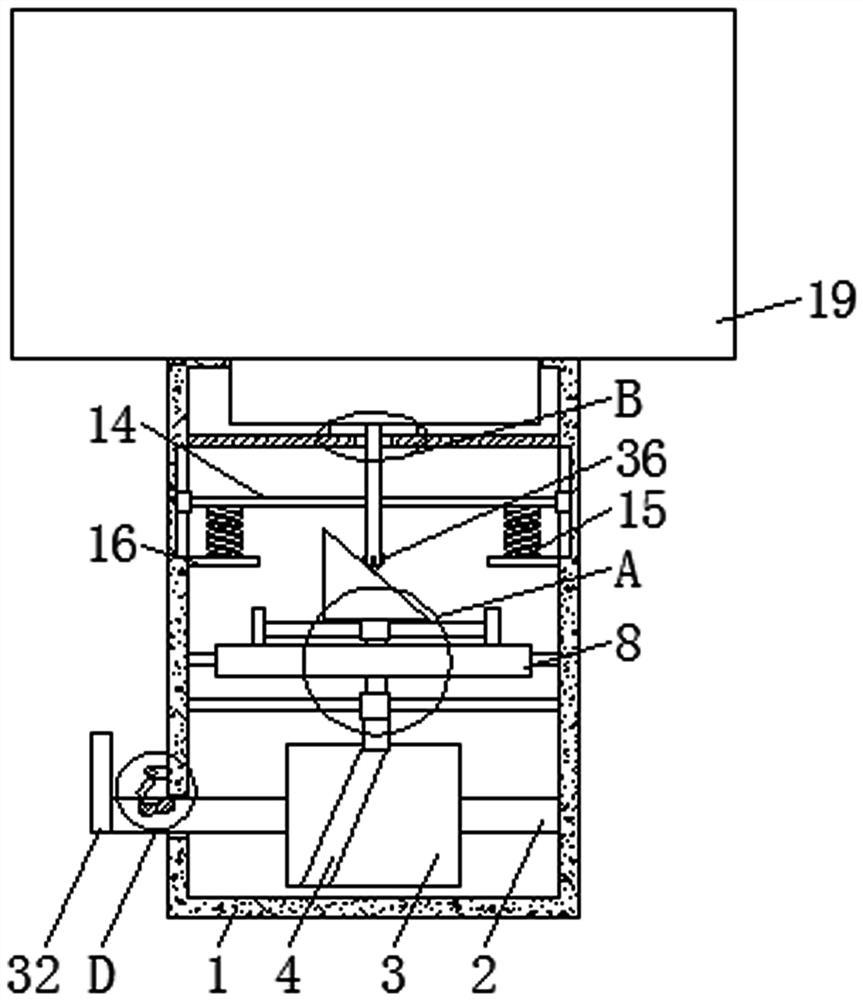
如图3和图4所示,牵引动力模块1包括:上约束导轨5、下约束导轨6、上滑块7、下滑块8、上电动卷绕盘9、下电动卷绕盘10、被动卷绕盘11、绳索12、牵引连接扣13、动力约束扣14、动力信号线15和横栏16。上约束导轨5布置在巨型船段的上方,下约束导轨6固定在船段的地面,上滑块7、下滑块8分别安装在上下约束导轨5、6上,上电动卷绕盘9和被动卷绕盘11与上滑块7连接,下电动卷绕盘10与下滑块8连接。实现上、下电动卷绕盘9、10和被动卷绕盘11沿上、下约束导轨6、7方向上的左右移动。上、下电动卷绕盘9、10上卷绕着绳索12,协调控制绳索12的收放。被动卷绕盘11上盘绕着动力信号线15,被动卷绕盘11可以通过被动受力实现对动力信号线15的收和放。绳索12通过横栏16以及牵引连接扣13与制动行走底盘模块2连接,动力信号线15穿过横栏16的槽口,通过动力约束扣14固定在制动行走底盘模块2上。通过绳索牵引实现制动行走底盘模块2相对于巨型船段的运动。
制动行走底盘模块2包括:磁性底板17、轮式底板18、被动轮19、弹性连接铰20、电磁基体21、侧板22、阻尼合页23、中间板24、橡胶弹簧25。磁性底板17和轮式底板18之间通过弹性连接铰20相互连接,被动轮19安装在轮式底板18上,电磁基体21固定在磁性底板17上。若干个轮式底板18和若干个磁性底板17组合成一体,与中间板24通过阻尼合页23相互连接。中间板24作为传感器模块4和工具对接模块3的固定处,与侧板22相互固定。通过磁吸附的方式实现制动行走底盘模块2的精准定位和固定。
工具对接模块3包括:基座26、环段卡箍27、预紧顶丝28、弹性顶轮29、通用工具接头30。基座26与中间板24相互连接,环段卡箍27作为锁紧装置,通过螺钉联接的方式与基座26连接,通过预紧顶丝28调整锁紧力的大小。弹性顶轮29一端与侧板22连接,另一端顶在船段的表面上,保持工具对接模块3与船段表面有一定的距离。通用工具接头30与基座26相互连接固定。该模块可以按照加工需求,更换不同功能的作业头,例如:切割头、喷绘头和清洗装置。
传感器模块4包括:固定架31、陀螺仪32、超声波壁障仪33、微型控制板34、线缆束线器35。固定架31安装在侧板22上,陀螺仪32、超声波壁障仪33、微型控制板34固定在固定架31上,线缆束线器35安装在侧板22上。该模块用于机器人的精准定位及运动中的避障。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
一种用于巨型船体多功能加工的自适应牵引爬壁机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0