









专利摘要
一种基于无线传感网络的临近空间飞艇状态监视系统,包括:包括:布置于飞艇内不同位置的若干簇传感器节点、设置于每个簇中的中继节点、与所有中继节点相连通的汇聚节点以及与汇聚节点相连的艇载控制模块,其中:传感器节点采集应变监测量和温度监测量并转换为电信号后输出至中继节点,中继节点不参与信号采集且仅转发簇内的传感器节点所获得的信号至汇聚节点,汇聚节点与艇载控制模块相连,并传输可传感器节点采集到的数据信息。本发明通过无线传感网络将状态监视信号稳定、准确地传输至艇载控制模块,并尽量产生较少的额外重量,影响飞艇本身的承载能力。
权利要求
1.一种基于无线传感网络的临近空间飞艇状态监视系统,其特征在于,包括:布置于飞艇内不同位置的若干簇传感器节点、设置于每个簇中的中继节点、与所有中继节点相连通的汇聚节点以及与汇聚节点相连的艇载控制模块,其中:传感器节点采集应变、温度、压差监测量并转换为电信号后输出至中继节点,中继节点不参与信号采集且仅转发簇内的传感器节点所获得的信号至汇聚节点,汇聚节点与艇载控制模块相连,并传输所述传感器节点采集到的数据信息;所述的传感器节点包括:传感单元、数据处理单元、无线通信单元以及能量管理单元,通过将飞艇表面划分为若干个区域,大量传感器节点部署在飞艇上,每个区域称之为一个节点簇;所述的传感器节点能量管理单元控制所述无线通信单元的供电方式,所述无线通信单元有电池和外部电源供电两种方式,当所述无线通信单元与数据采集板相连采集数据时,所述无线通信单元使用电池供电,当调试所述无线通信单元的程序或者所述无线通信单元与USB虚拟串口相连作为基站时,所述无线通信单元采用外部电源供电。
2.根据权利要求1所述的基于无线传感网络的临近空间飞艇状态监视系统,其特征是,所述的传感单元包括:应变传感器、温度传感器、压差传感器和A/D转换器。
3.根据权利要求1所述的基于无线传感网络的临近空间飞艇状态监视系统,其特征是,所述的数据处理单元包括:存储器和含有嵌入式操作系统的处理器。
4.根据权利要求1所述的基于无线传感网络的临近空间飞艇状态监视系统,其特征是,所述的中继节点之间通过无线方式连接,且中继节点与汇聚节点相连,中继节点转发的电信号沿着其他中继传感器节点逐跳进行传输,在传输过程中监测数据可能被多个中继节点处理,经过多跳路由传至汇聚节点,最后通过有线方式到达所述艇载控制模块。
5.根据权利要求4所述的基于无线传感网络的临近空间飞艇状态监视系统,其特征是,所述的汇聚节点包括:处理单元、无线通信单元以及有线通信接口单元。
6.根据权利要求1所述的基于无线传感网络的临近空间飞艇状态监视系统,其特征是,所述的艇载控制模块包括:处理器单元、无线通信单元、能量管理单元以及网络节点控制单元。
7.根据权利要求1或2所述的基于无线传感网络的临近空间飞艇状态监视系统,其特征是,所述的传感单元中设有固定在柔性蒙皮上的电阻应变片和与之相连的惠斯通电桥电路、放大电路以及A/D转换电路,其中:用于测量电阻的变化量的电阻应变片将应变值信号通过惠斯通电桥电路转为电压信号输出,电压信号经过传感器节点中传感单元的放大器放大后由A/D转换电路转化成为数字信号后进入传感器节点的数据处理单元进行处理。
8.根据权利要求7所述的基于无线传感网络的临近空间飞艇状态监视系统,其特征是,所述的惠斯通电桥为等臂电桥。
说明书
技术领域
本发明涉及的是一种飞行器领域的技术,具体是一种基于无线传感网络的临近空间飞艇状态监视系统。
背景技术
为保证飞行器在空中的可靠运行,一般都会在飞行器上设计一套状态监视系统,通过在飞行器的特定位置布置相应的传感器,如应变、温度等传感器,通过对上述信号的采集处理来判断飞行器是否状态工作。例如要想获得柔性蒙皮材料的应变测量数据,首先要在蒙皮的不同部位上安装布置大量的应变传感器。而在蒙皮材料上布置的传感器越多,获得的蒙皮材料应变数据就越完整,同时对于蒙皮材料进一步结构设计以及浮空器安全状态实时监测的帮助也就越大。在传统的监测设计方案中,传感器通常采用有线通信和集中供电的方式,即传感器与浮空器任务管理中心之间的信息传输采用有线通信方式,同时传感器所需的能源由浮空器能源系统统一进行提供。按照常规设计思路,每个传感器与任务管理中心和能源系统之间都需要线缆来完成数据的传输以及能源的供给。对于临近空间巨型浮空器而言,需要大量的传感器来完成应变的监测,而随着传感器数目的增加,大量的电缆线会对整个浮空器平台产生很不利的影响,如:增加了平台的重量,从而降低了浮空器平台的有效载荷重量;过多的线缆大大降低整个监测系统的可靠性;大量的传感器使得任务管理中心的数据采集接口更为复杂;采用有线连接方式,可扩展性差,增加和改变传感器部分比较困难;因此,在临近空间飞艇上用传统方式进行状态监视,存在很大的问题。
发明内容
本发明针对现有技术多采用星型拓扑链接,因此资源共享能力差,且一旦中央节点出现问题,将导致整个网络瘫痪。对于长期驻空的临近空间大尺度飞艇的多点状态数据采集而言可靠性较低。
存在的上述不足,提出一种基于无线传感网络的临近空间飞艇状态监视系统,通过无线传感网络将状态监视信号稳定、准确地传输至艇载控制模块,并尽量产生较少的额外重量,影响飞艇本身的承载能力。
本发明是通过以下技术方案实现的:
本发明包括:布置于飞艇内不同位置的若干簇传感器节点、设置于每个簇中的中继节点、与所有中继节点相连通的汇聚节点以及与汇聚节点相连的艇载控制模块,其中:传感器节点采集应变、温度、压差等监测量并转换为电信号后输出至中继节点,中继节点不参与信号采集且仅转发簇内的传感器节点所获得的信号至汇聚节点,汇聚节点与艇载控制模块相连,并传输可传感器节点采集到的数据信息。
所述的传感器节点包括:传感单元、数据处理单元、无线通信单元以及能量管理单元,通过将飞艇表面划分为若干个区域,大量传感器节点部署在飞艇上,每个区域称之为一个节点簇。
所述的传感单元包括:应变传感器、温度传感器、压差传感器和AD转换器。
所述的数据处理单元包括:存储器和含有嵌入式操作系统的处理器。
所述的无线通信单元包括:无线通信收发机构。
所述的中继节点之间通过无线方式连接,且中继节点与汇聚节点相连,中继节点转发的电信号沿着其他中继传感器节点逐跳进行传输,在传输过程中监测数据可能被多个中继节点处理,经过多跳路由传至汇聚节点,最后通过有线方式到达艇载计算机。
所述的汇聚节点包括:处理单元、无线通信单元以及有线通信接口单元。
所述的艇载控制模块包括:处理器单元、无线通信单元、能量管理单元以及网络节点控制单元。
技术效果
与现有技术相比,本发明有效解决了临近空间巨型柔性飞艇的状态监视问题,可推广到所有临近空间飞行器的状态监测系统中;同时本发明的具有很高的可靠性,整个状态监测系统工作过程中,即使单个传感器节点出现故障,剩余节点会自动进行自组网,而不会影响整个系统的运行。本发明的传感器节点可以同时采集应变、温度、压差等信号,而且可以根据需要增加其它类型传感器。
附图说明
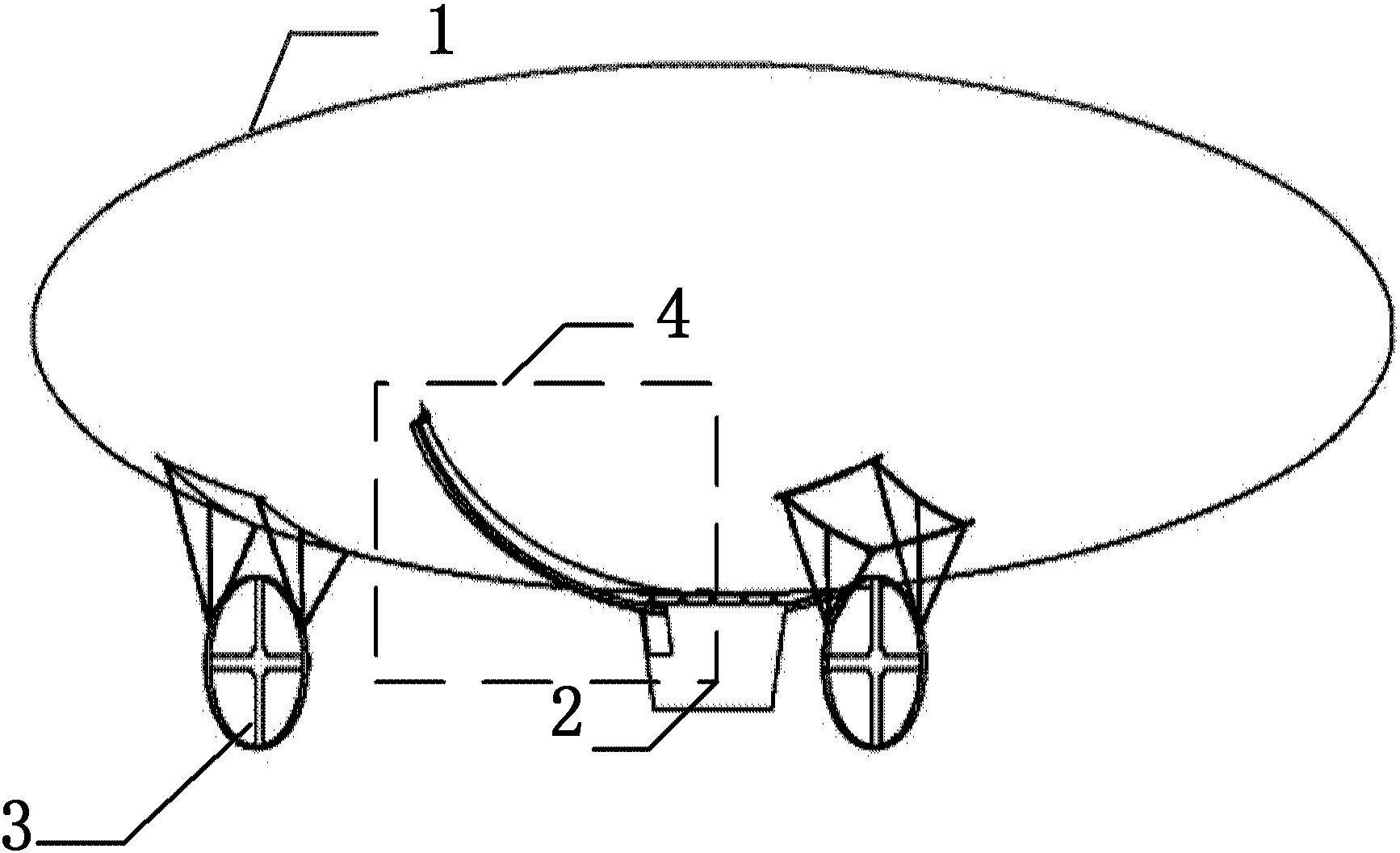
图1为本发明系统示意图;
图2为直流电桥示意图;
图3为传感器节点应用程序流程图;
图4为数据采集流程图。
具体实施方式
如图1所示,本实施例包括:布置于飞艇内不同位置的若干簇传感器节点、设置于每个簇中的中继节点、与所有中继节点相连通的汇聚节点以及与汇聚节点相连的艇载控制模块,其中:传感器节点采集应变监测量并转换为电信号后输出至中继节点,中继节点不参与信号采集且仅转发簇内的传感器节点所获得的信号至汇聚节点,汇聚节点通过串口或者USB借口与艇载控制模块相连,并传输可传感器节点采集到的数据信息。
所述的传感器节点的传感单元具体包括:固定在柔性蒙皮上的电阻应变片和与之相连的惠斯通电桥电路、放大电路以及A/D转换电路,其中:用于测量电阻的变化量的电阻应变片将应变值信号通过惠斯通电桥电路转为电压信号输出,电压信号经过传感器节点中传感单元的放大器放大后由A/D转换电路转化成为数字信号后进入传感器节点的数据处理单元进行处理。
所述的惠斯通电桥如图2所示,由R1、R2、R3、R4四个桥臂电阻组成,其中:电桥的A、C为电源输入端,输入直流电压为UAC=E,而电桥的B、D为输出端,输出电压为UBD。应变片工作时其电阻值变化很小,电桥相应的输出电压也很小,因此测量电桥的输出端一般直接接到放大器的输入端进行放大。由于放大器的输入阻抗比桥路的输出阻抗高很多,往往都在10MΩ以上,因此当电桥输出端直接接入放大器后,电桥的输出电流可以忽略不计,可以认为电桥输出端是开路的,即IAB=IBC。
本实施例中的惠斯通电桥的电桥臂R1=R2=R3=R4,即等臂电桥,因此有:
其中:K为应变片灵敏系数,E为电桥电压,ε1~ε4为四个电桥臂上的应变值。
所述的传感器节点数据处理单元为传感器节点的计算核心,它主要负责完成所有任务的管理和调度,控制指令的发送,算法的执行以及采集数据的处理等。
所述的传感器节点处理器单元是节点的控制核心,它通过外部接口与数据采集模块相接后实现对监测信息的采集,其本身负责对采集数据进行处理,然后将处理后的数据送入无线通信单元。针对不同的无线传感网络节点类型,数据处理模块的功能略有不同。对于传感器节点而言,数据处理模块主要作用是通过控制数据采集模块上传感器的开关来实现被监测物理量数据的采集,经过处理后将数据通过无线通信单元以多跳方式发送给中继节点。对于中继节点而言,数据处理模块主要作用是接收所在区域内的传感器节点发送过来的数据,经过处理后通过无线通信单元发送至汇聚节点,并将接收到的控制指令转发给所在区的传感器节点。对于汇聚节点而言,数据处理模块主要作用是接收所有中继节点发送过来的数据,并通过控制其内部的串口或者USB接口与艇载计算机进行通信,将收到的整个传感器网络的数据发送给艇载计算机。同时,汇聚节点还将艇载计算机发送的指令转发给节点,对整个无线传感器网络范围内的节点的工作状态进行管理。
所述的传感器节点无线通信单元:无线通信单元是与数据处理模块连接在一起,用于收发无线射频信号的单元。其中,射频芯片是无线通信单元的核心,射频芯片选择时需要尽量满足功率高、低功耗、低成本等方面的要求。无线传感器网络使用2.4GHz频段,因为该频段无需申请许可证。
所述的传感器节点能量管理单元:无线通信单元有电池和外部电源供电两种方式。当无线通信单元与数据采集板相连采集数据时,使用电池供电;当调试无线通信单元的程序或者与USB转虚拟串口相连作为基站时,采用板载供电,即通过PC连接的USB供电。为了确保两种电源在不同的场合相互没有影响,利用一个单刀双制的开关选择使用其中一种电源,两种电源不能同时使用。
所述的传感器节点的嵌入式软件设计:无线传感器网络节点其实是一种嵌入式系统,不过相对传统的嵌入式系统而言,其对计算和能耗性能的限制更为明显,传统常用的嵌入式操作系统并不适用于无线传感网络。对于传感器节点软件而言,核心是无线传感器网络操作系统,用户可利用操作系统有效管理传感器节点的硬件资源以及相关任务的执行,同时可以不必直接对硬件进行编程,使开发节点应用程序更为方便。
如图3所示,为上述系统的控制方法,具体为:开启传感器节点电源后,系统开始初始化,然后进入休眠状态等待,直到定时时间Tr到达才被激活,节点控制传感器开始采集数据。当所有传感器完成采集工作后将所有的数据打包发送给中继节点。如果节点正在发送数据,则程序进入等待状态,Tr到达后继续采集并处理数据,直到节点完成发送数据后再继续发送数据包;反之,则发送本次数据包。当完成数据包的发送后,返回一个信号量表示本次数据包发送成功,节点进入休眠状态,准备开始下次采集数据。由于传感器网络中存在多个传感器节点,通过给每个节点设置不同的Tr,可以保证各个节点发送的数据包相互不冲突。因此,虽然采样频率相同,但不同的节点不会同时发送数据,从而避免产生数据冲突的情况。
如图4所示,为图3中数据采集部分的详细流程图,数据采集开始后,首先进行初始化,然后再初始化成功后发送测量指令,等待测量数据读取结束,然后停止测量,数据采集结束。
上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
基于无线传感网络的临近空间飞艇状态监视系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0