









专利摘要
本实用新型涉及无人机技术领域,且公开了一种欺骗干扰用无人机,该欺骗干扰用无人机,通过保护块通过风流的传动方向进行转动,将保护块的凸起面对应与风流方向,防止雨水等杂物对机翼进行撞击使机翼失衡,雨水等杂物通过保护块的凸起面滑动脱离保护块,防止雨水等杂物在保护块上残留,风流的风力对风扇进行吹动使风扇进行转动,风扇转动带动连接杆进行转动带动保护块进行转动,限位块对保护块的转动幅度进行限位,保护块通过风流的传动方向进行转动,将保护块的凸起面对应与风流方向,防止雨水等杂物对机翼进行撞击使机翼失衡,雨水等杂物通过保护块的凸起面滑动脱离保护块,防止雨水等杂物在保护块上残留。
权利要求
1.一种欺骗干扰用无人机,包括机体(1)、机翼(2)和保护装置(3),机翼(2)固定安装在机体(1)的左右两侧,其特征在于:所述保护装置(3)包括传动箱(31)、传动杆(32)和保护块(33),传动箱(31)固定安装在机体(1)的顶面,传动杆(32)固定安装在传动箱(31)左右两侧,传动杆(32)远离传动箱(31)的一端与保护块(33)固定连接。
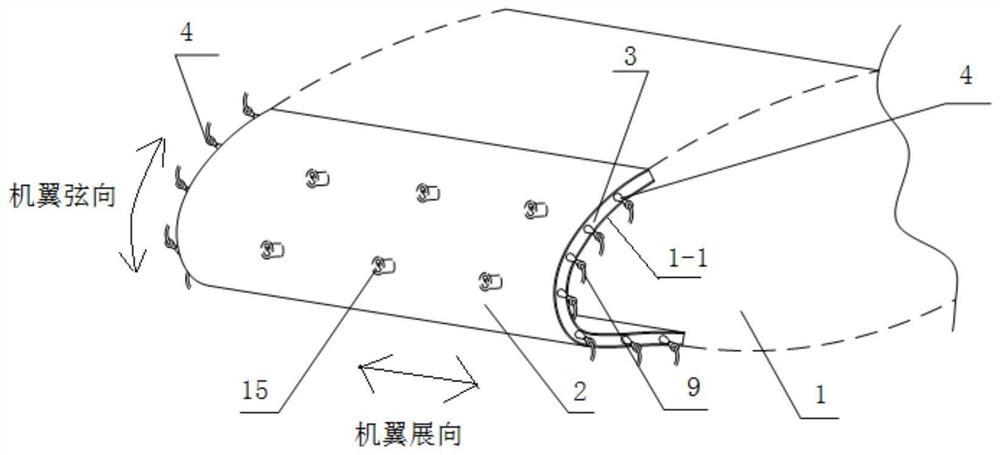
2.根据权利要求1所述的一种欺骗干扰用无人机,其特征在于:所述机翼(2)开设有1-20个导风孔(201),机导风孔(201)顶端均固定连接有转轴合页(202),转轴合页(202)固定连接有阻风板(203)。
3.根据权利要求1所述的一种欺骗干扰用无人机,其特征在于:所述传动箱(31)由箱体(311)、限位板(312)、锥形齿轮A(313)、锥形齿轮B(314)、连接杆(315)、风扇(316)和转动轴承(317)组成,箱体(311)开设有传动孔,箱体(311)与传动杆(32)活动连接,传动杆(32)与锥形齿轮A(313)固定连接,传动孔内壁与转动轴承(317)固定连接,转动轴承(317)的内圈与连接杆(315)固定连接,连接杆(315)与风扇(316)固定连接,连接杆(315)固定连接有锥形齿轮B(314),锥形齿轮A(313)和锥形齿轮B(314)啮合,箱体(311)左右两面与限位板(312)固定连接。
4.根据权利要求1所述的一种欺骗干扰用无人机,其特征在于:所述保护块(33)的形状呈扇形体,且保护块(33)凸起一面方向向上。
说明书
技术领域
本实用新型涉及无人机技术领域,具体为一种欺骗干扰用无人机。
背景技术
现代战争中,预警机担负着空中执勤、指挥和武器引导等多项任务,大大提高了空中作战编队的作战能力,成为高威胁度目标。战时对预警机实施综合干扰,降低其探测性能,延误其信息传递,使其不能有效发挥预警、指挥等功能,掩护己方作战行动是当前需要考虑的一个重要课题。
无人机属于一种动力驱动飞行器,随着信息技术的持续发展,它能够替代有人飞行器执行多项任务,包括在恶劣环境下的各种枯燥甚至危险的任务。无人机与有人飞行器相较,其优势在于机动性强、投入费用少以及零人员伤亡等,尤其是在执行高危险任务时可以充分发挥其自身优势。无人机于科索沃战争、海湾战争、伊拉克战争、阿富汗战争以及利比亚战争中承担的任务主要包括侦查情报、中继通信、评估战果、对地攻击和电子对抗等,北约与美国在无人机的协助下,在各场战役中获得了最后的胜利。
航迹欺骗干扰技术是一种可以在距离、角度和速度3个维度上同时对雷达实施欺骗的新型综合欺骗干扰技术,比单纯的一维欺骗具有更高的模拟逼真度,是一种更高级的有源欺骗干扰技术。鉴于此,利用无人机对预警机进行航迹欺骗干扰成为当前研究的重点问题。
用作航迹欺骗干扰的无人机需要在海上进行长时间航行,而海上的风流较陆地上的风力更大,在海上进行航行时的无人机机翼容易受到风流的影响而导致无人机存在失衡等问题,影响到无人机的使用,且鸟粪等杂物或者下雨等天气的雨水也会随着风流对机翼造成损伤。因此亟需一种欺骗干扰用无人机来解决上述问题。
实用新型内容
(一)解决的技术问题
针对现有技术的不足,本实用新型提供了一种欺骗干扰用无人机,具备减少风力影响和防止杂物对机翼撞击等优点,解决了无人机机翼容易受到风流的影响而导致无人机存在失衡等问题和鸟粪等杂物或者下雨等天气的雨水也会随着风流对机翼造成损伤的问题。
(二)技术方案
为实现上述减少风力影响和防止杂物对机翼撞击的目的,本实用新型提供如下技术方案:一种欺骗干扰用无人机,包括机体、机翼和保护装置。
机翼固定安装在机体的左右两侧,机翼靠近机体机头的一面开设有20个导风孔,机翼靠近机体机头一面的在20个导风孔顶端均固定连接有转轴合页,转轴合页的另一个安装面固定连接有阻风板。
保护装置包括传动箱、传动杆和保护块,传动箱固定安装在机体的顶面,传动杆固定安装在传动箱左右两侧,传动杆远离传动箱的一端与保护块固定连接。
传动箱由箱体、限位板、锥形齿轮A、锥形齿轮B、连接杆、风扇和转动轴承组成,箱体开设有两个传动孔,箱体外壁的左右两侧开设有转孔,两个转孔内圈均与一个转动轴承固定连接,两个转动轴承的内圈与传动杆固定连接,传动杆位于转动孔内的一端与锥形齿轮A固定连接,传动孔内壁与两个转动轴承固定连接,传动孔内转动轴承的内圈与连接杆固定连接,连接杆两端分别与一个风扇固定连接,连接杆对应锥形齿轮A两侧的外壁固定连接有两个锥形齿轮B,锥形齿轮A和两个锥形齿轮B啮合,箱体左右两侧与两个限位板固定连接,限位板分布在前后两端的底端,限位板与保护块底面对应。
优选的,传动孔呈凸字形且两个传动孔呈对立状态。
优选的,阻风板的高度大于导风孔的高度。
优选的,保护块的形状呈扇形体,且保护块凸起一面方向向上。
(三)有益效果
与现有技术相比,本实用新型提供了一种欺骗干扰用无人机,具备以下有益效果:
1、该欺骗干扰用无人机,通过保护块通过风流的传动方向进行转动,将保护块的凸起面对应与风流方向,防止雨水等杂物对机翼进行撞击使机翼失衡,雨水等杂物通过保护块的凸起面滑动脱离保护块,防止雨水等杂物在保护块上残留。
2、该欺骗干扰用无人机,通过无人机处于逆风飞行时,风流将阻风板顶开后从导风孔中导出,减少风流对机翼的阻力,无人机处于顺风飞行时,阻风板使导风孔呈封闭状态,通过风流推动机翼,减少无人机飞行时所需要的动能,增加无人机的续航时间。
附图说明
图1为单架无人机欺骗干扰敌方单架预警机的航路规划的示意图;
图2为任意时刻下敌方预警机、我方欺骗干扰无人机、期望的假目标点三者之间位置关系图;
图3为任意时刻无人机欺骗干扰预警机的示意图;
图4为欺骗干扰无人机和假目标的运动轨迹示意图;
图5为在当前单架无人机欺骗干扰敌方单架预警机这一任务下规划出的电子战无人机控制量变化曲线示意图;
图6为任务过程中电子战无人机速度变化曲线示意图;
图7为欺骗干扰无人机航迹偏角、航迹倾角变化曲线示意图;
图8为欺骗干扰无人机所发射的干扰信号与其所截获到的预警机发射信号之间的频差演化曲线示意图;
图9为无人机发射信号相对于接收信号的时延演化曲线示意图;
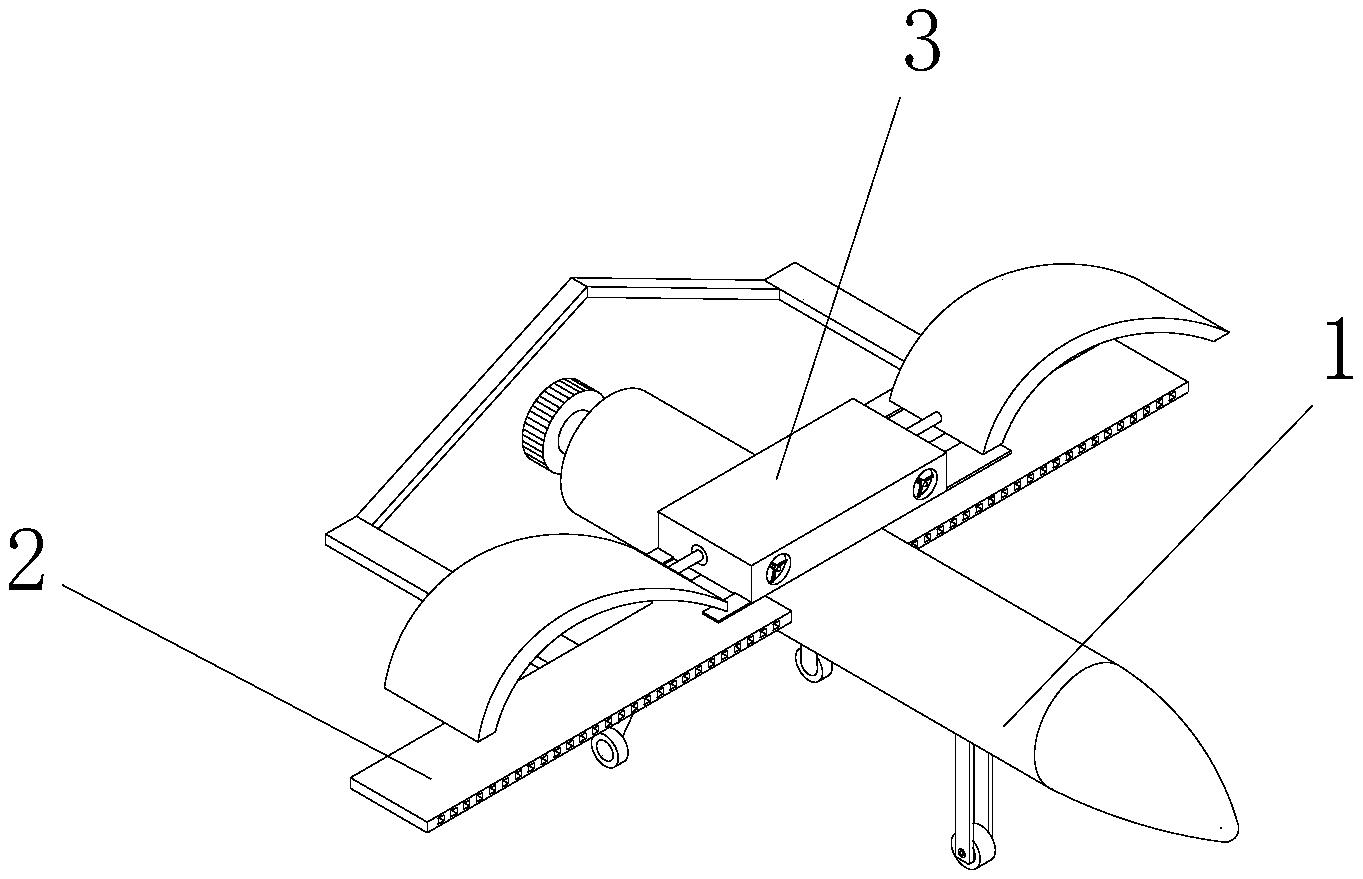
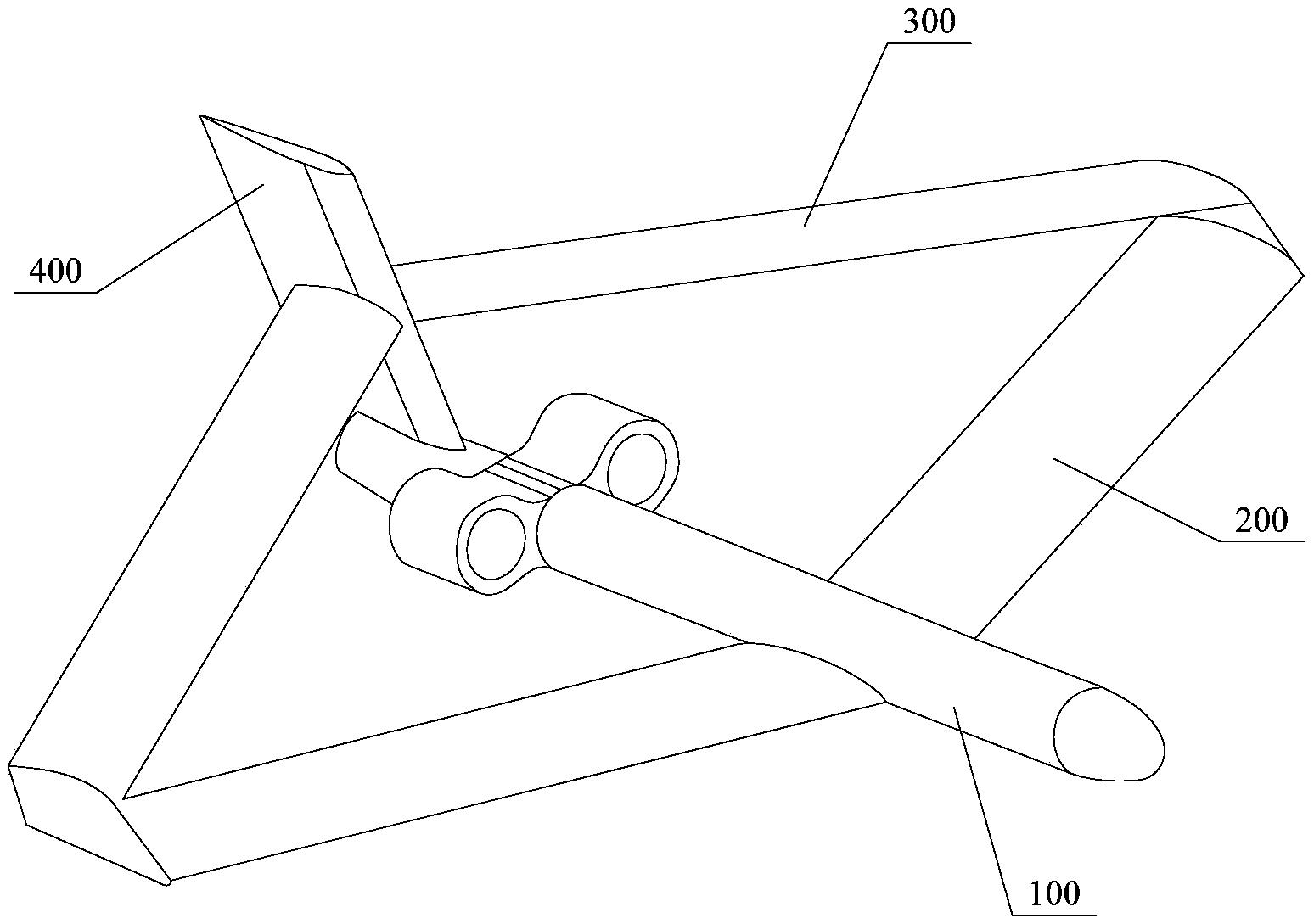
图10为本实用新型的结构示意图;
图11为本实用新型机翼的背面结构示意图;
图12为本实用新型图11的A处放大图;
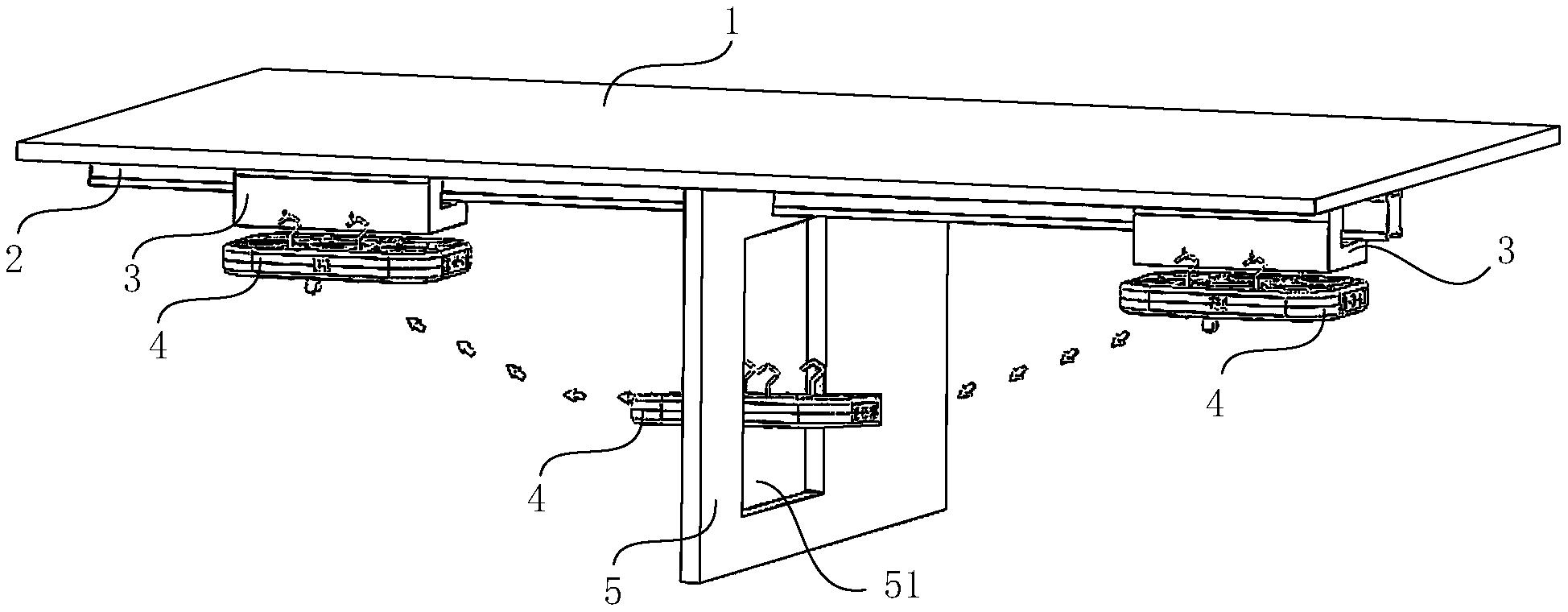
图13为本实用新型保护机构的结构示意图;
图14为本实用新型保护机构的顶面剖视结构示意图。
图中:1机体、2机翼、201导风孔、202转轴合页、203阻风板、3保护装置、31传动箱、311箱体、312限位板、313锥形齿轮A、314锥形齿轮B、315连接杆、316风扇、317转动轴承、32传动杆、33保护块。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
请参阅图1-14,本实用新型提出了一种欺骗干扰用无人机,包括机体1、机翼2和保护装置3,机体1采用固定翼无人机,固定翼无人机有着续航时间长、飞行稳定等优点,适合用于配合预警机进行欺骗干扰,该无人机为欺骗干扰的目的进行了特殊设定,其设定和计算过程等如下:
无人机欺骗干扰预警机航路规划
首先研究单架无人机欺骗干扰敌方单架预警机的航路规划问题,其示意图如图1所示。
在直角坐标系下,设敌方预警机的轨迹坐标为(xT(t),yT(t),zT(t)),我方欺骗干扰无人机的轨迹坐标为(xD(t),yD(t),zD(t)),期望的假目标轨迹坐标为(xF(t),yF(t),zF(t))。根据本文的作战任务设想,欺骗干扰无人机需要在海面上形成合理的假目标运动轨迹,所以令zF(t)=0,即当前的假目标运动轨迹坐标为(xF(t),yF(t),0)。
直角坐标系下,欺骗干扰无人机的运动学方程为:
式中,vD为欺骗干扰无人机的速度,βD为欺骗干扰无人机的航迹倾角,αD为欺骗干扰机的航迹偏角, 为欺骗干扰无人机x轴方向分速度, 为欺骗干扰无人机y轴方向分速度, 为欺骗干扰无人机z轴方向分速度(即无人机升降速度)。
任意时刻下,敌方预警机、我方欺骗干扰无人机、期望的假目标点三者之间都有如图2所述的位置关系:
由图2可以发现,在任务过程中,欺骗干扰无人机始终处于预警机与假目标的连线之上,即:
令zF=0,有:
由式(3)可得xD、yD表达式分别为:
其中,zD需满足不等式约束:
0<zD<zT (6)
对(4)求导可得:
对(5)求导可得:
进一步可得欺骗干扰无人机的速度为:
欺骗干扰无人机的航迹偏角表达式为:
欺骗干扰无人机的航迹倾角表达式为:
欺骗干扰无人机与它所欺骗的预警机之间的距离可由下式(12)进行计算:
设欺骗干扰无人机的加速度、航迹偏角变化率和航迹倾角变化率分别为uD1、uD2、uD3,则:
以上三式中的uD1、uD2和uD3即欺骗干扰无人机的控制量。
综上所述,在本文的作战任务设想下,欺骗干扰无人机欺骗预警机的系统模型可由式(1)以及式(4)~式(15)共同描述。
为了规划出尽可能真实可靠的无人机飞行航路,考虑在预警机到无人机和假目标距离之比、无人机飞行速度、航迹倾角、航迹偏角变化率、航迹倾角变化率、加速度、升降速度这7种参数限制下对欺骗干扰无人机的飞行轨迹进行最优化求解。同时为了所形成假目标轨迹的稳定性,从令欺骗干扰无人机自身的运动轨迹曲率尽可能小这一角度出发,建立最优控制模型:
式中:uD1min表示欺骗干扰无人机的最小加速度;
uD1max表示欺骗干扰无人机的最大加速度;
uD2min表示欺骗干扰无人机的最小航迹偏角变化率;
uD2max表示欺骗干扰无人机的最大航迹偏角变化率;
uD3min表示欺骗干扰无人机的最小航迹倾角变化率;
uD3max表示欺骗干扰无人机的最大航迹倾角变化率;
βDmin表示欺骗干扰无人机的最小航迹倾角;
βDmax表示欺骗干扰无人机的最大航迹倾角;
vDmin表示欺骗干扰无人机的最小速率;
vDmax表示欺骗干扰无人机的最大速率;
vzmin表示欺骗干扰无人机的最小升降速率;
vzmax表示欺骗干扰无人机的最大升降速率;
rDT表示欺骗干扰无人机与预警机之间的距离;
rFT表示假目标点与预警机之间的距离。
求解上述最优控制问题即可求得欺骗干扰机的最优航迹和相应的运动参数。
欺骗干扰信号控制参数
敌方预警机的发射信号辐射到我方欺骗干扰无人机时,除了会发生反射以外,还会被我方无人机上的接收机所截获,并且按需经过一定处理后再进行转发,从而达到欺骗敌方预警机的效果。针对不同的战场情况与作战任务,干扰信号的控制参数将会有不同的求解方法[16-18]。本节将在上一节所规划出的欺骗干扰无人机航迹及运动参数的基础上,对无人机所发射的干扰信号的发射频率与时延进行研究与求解。
任意时刻无人机欺骗干扰预警机的示意图如图3所示。设预警机发射信号的载频为fc,波长为λc。对预警机进行欺骗干扰时,任意时刻,假目标点、欺骗干扰无人机与预警机三者始终在一条直线上,设敌方预警机的速度大小为vE,制定的舰船假目标运动速度大小为vF,规划出的欺骗干扰无人机的速度大小为vD。设从预警机指向欺骗干扰无人机的方向向量为 从假目标指向欺骗干扰无人机的方向向量为
若假目标“真实存在”,预警机发射信号“接触”到假目标后反射的回波信号频率为:
fF=fc+fdE+fdF (17)
其中,fdE、fdF分别代表预警机、假目标运动产生的多普勒频移:
如图3所示,矢量 为从假目标指向无人机的单位矢量,矢量 为从预警机指向无人机的单位矢量。式(18)中,θE为预警机速度方向与 的夹角;式(19)中,θF为假目标速度方向与 的夹角。
我方欺骗干扰无人机期望敌方预警机接收到的信号频率为:
欺骗干扰无人机以vD的速度运动时其发射信号产生的多普勒频移为:
其中,θD为欺骗干扰无人机速度方向与 的夹角,λT为欺骗干扰无人机发射信号的波长。
所以欺骗干扰无人机为了使敌方预警机最终接收到的信号频率为fR,其发射信号的频率为:
由于:
其中,c代表光速。
所以,将式(23)代入式(21)可得:
将式(24)代入式(22)可得关于欺骗干扰无人机发射信号频率fT的方程:
解方程(25)可得:
分别将式(18)与式(19)代入式(26)可得:
根据 将式(27)进一步化简为:
欺骗干扰无人机进行存储转发时,其发射信号相对于接收信号的频移为:
Δf=fT-fR (29)
要在预警机上产生假目标的航迹点,必须知道产生的有源假目标点相对于预警机的距离,进而计算出该假目标点相对于预警机的时延Δτ。对无人机所截获的信号延时Δτ后发出,即可产生一个距离欺骗的假目标点[19]。任意时刻欺骗干扰无人机与预警机的距离为rD,假目标与预警机的距离为rF,则rF>rD时,无人机发射信号的延时量为:
仿真分析
本节在Matlab环境下对前文所介绍的单架无人机欺骗干扰单架预警机时的航路规划与干扰参数求解方法的可行性与有效性进行验证。
通常,预警机的机动幅度较小,巡航速度较慢,一般为600km/h左右,飞行高度约为8000~10000m,且其活动区域和飞行诸元相对稳定;常规航母、导弹舰等军舰的速度一般在30节(即15.4m/s)左右。据此,假定探测到的敌方预警机运动航迹为:
期望假目标运动航迹为:
上述2式航迹的单位均为m。我方欺骗干扰无人机对敌方预警机实施距离欺骗干扰,运行时间为20s,仿真时间步长为0.1s。
在执行作战任务时,无人机的相关仿真约束参数如下表1所示:
表1无人机干扰预警机时飞行参数约束
图4是单架欺骗干扰无人机对单架敌方预警机实施距离欺骗的示意图。给定探测到的预警机位置信息、期望的假目标航迹和初始条件后,即可按照上文所述最优控制模型来确定我方欺骗干扰无人机的运动轨迹以及运动参数。
由图4欺骗干扰无人机和假目标的运动轨迹可以看出,欺骗干扰无人机在飞行过程中,持续对被欺骗预警机的进行距离延迟欺骗,在海面上产生一条符合实际舰船运动特征的假目标轨迹。
图5为在当前单架无人机欺骗干扰敌方单架预警机这一任务下规划出的电子战无人机控制量变化曲线。由图中可以看出,我方欺骗干扰无人机具有较小的航迹偏角变化率,显然,这符合上文所构筑的最优控制模型时所运用的代价函数 而且较小的控制量保证了无人机执行任务过程中飞行的平稳性。
图6为任务过程中电子战无人机速度变化曲线。显而易见,图(a)与(d)中的速度与升降速度均满足表1中的参数限制。而且当前场景下规划出的欺骗干扰无人机的升降速度为0,即z轴分速度为0。
图7为欺骗干扰无人机航迹偏角、航迹倾角变化曲线。从图中可以看出,在整个任务过程中,无人机速度方向变化较小,且始终符合相应的约束限制。而且图(b)中欺骗干扰无人机的航迹倾角始终为0也与图6(d)中的升降速度为0这一情况相吻合。
图8为欺骗干扰无人机所发射的干扰信号与其所截获到的预警机发射信号之间的频差演化曲线。由于欺骗干扰无人机、预警机、假目标都在运动,所以无人机在截获信号的基础上加入频差并进行转发,使得敌方预警机误认为存在正在以速度vF运动的假目标。
图9为无人机发射信号相对于接收信号的时延演化曲线。欺骗干扰无人机为了使飞行于高空的预警机误认海面上存在舰船假目标,所以其对预警机发射的干扰信号相对于其截获的预警机发射信号需存在一定的时间延迟。通过观察图4可知,图9中的时延越来越大是因为规划出的无人机航迹与期望形成的海面上的舰船假目标之间的距离越来越远。
综上所述,本文所提出的单机欺骗干扰单架预警机航路规划与干扰信号控制参数求解方法具有一定的可行性,通过该方法可以形成一条在海面上运动的具有军舰运动特性的假目标,该无人机其余的内部结构、系统和工作原理等均为现有结构,在此不作赘述。
机翼2固定安装在机体1的左右两侧,机翼2靠近机体1机头的一面开设有20个导风孔201,机翼2靠近机体1机头一面的在20个导风孔201顶端均固定连接有转轴合页202,转轴合页202的另一个安装面固定连接有阻风板203,阻风板203的高度大于导风孔201的高度,无人机处于逆风飞行时,风流将阻风板203顶开后从导风孔201中导出,减少风流对机翼2的阻力,无人机处于顺风飞行时,阻风板203使导风孔201呈封闭状态,通过风流推动机翼2,减少无人机飞行时所需要的动能,增加无人机的续航时间。
保护装置3包括传动箱31、传动杆32和保护块33,传动箱31固定安装在机体1的顶面,传动杆32固定安装在传动箱31左右两侧,传动杆32远离传动箱31的一端与保护块33固定连接,保护块33的形状呈扇形体,且保护块33凸起一面方向向上。
传动箱31由箱体311、限位板312、锥形齿轮A313、锥形齿轮B314、连接杆315、风扇316和转动轴承317组成,箱体311开设有两个传动孔,传动孔呈凸字形且两个传动孔呈对立状态,箱体311外壁的左右两侧开设有转孔,两个转孔内圈均与一个转动轴承317固定连接,两个转动轴承317的内圈与传动杆32固定连接,传动杆32位于转动孔内的一端与锥形齿轮A313固定连接,传动孔内壁与两个转动轴承317固定连接,传动孔内转动轴承317的内圈与连接杆315固定连接,连接杆315两端分别与一个风扇316固定连接,连接杆315对应锥形齿轮A313两侧的外壁固定连接有两个锥形齿轮B314,锥形齿轮A313和两个锥形齿轮B314啮合,箱体311左右两侧与两个限位板312固定连接,限位板312分布在前后两端的底端,限位板312与保护块33底面对应,无人机行驶过程中,风流的风力对风扇316进行吹动使风扇316进行转动,风扇316转动带动连接杆315进行转动,连接杆315转动带动传动杆32通过锥形齿轮A313和锥形齿轮B314进行转动,带动保护块33进行转动,限位块对保护块33的转动幅度进行限位,保护块33通过风流的传动方向进行转动,将保护块33的凸起面对应与风流方向,防止雨水等杂物对机翼2进行撞击使机翼2失衡,雨水等杂物通过保护块33的凸起面滑动脱离保护块33,防止雨水等杂物在保护块33上残留。
在使用时,无人机行驶过程中,风流的风力对风扇316进行吹动使风扇316进行转动,风扇316转动带动连接杆315进行转动,连接杆315转动带动传动杆32通过锥形齿轮A313和锥形齿轮B314进行转动,带动保护块33进行转动,限位块对保护块33的转动幅度进行限位,保护块33通过风流的传动方向进行转动,将保护块33的凸起面对应与风流方向,无人机处于逆风飞行时,风流将阻风板203顶开后从导风孔201中导出,无人机处于顺风飞行时,阻风板203使导风孔201呈封闭状态,通过风流推动机翼2。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
一种欺骗干扰用无人机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0