

IPC分类号 : G06T7/70,G06T7/68,G06T7/00,G06F16/29,G06F16/906,G06Q10/00,G06Q50/06,G01C9/00






专利摘要
本发明涉及无人机测量领域,特别是利用无人机对电线杆倾斜度进行测量,具体地提供一种基于同步定位与建图的无人机监测电线杆倾斜度系统。该系统包括电线杆结构模型数据库模块、无人机飞线与测量模块和无人机数据处理模块,根据电线杆的三维坐标数据和无人机的位姿数据拟合出电线杆的中心轴线以及计算出电线杆的倾斜度。本发明能够实时监测电线杆的情况,在最大程度上提升监测效能,降低监测的人力成本和设施成本,还能够实现在未知环境下且无定位系统时对电线杆的倾斜度进行测量,保证更加智能化、高效化和精确地监测电线杆,快速找到存在隐患的电线杆并通告,加强智能化的维护巡检工作;具有准确性、稳定性、易用性和功能性等优点。
权利要求
1.基于同步定位与建图的无人机监测电线杆倾斜度系统,用于测量电线杆的倾斜度,其特征在于:包括电线杆结构模型数据库模块、无人机飞行与测量模块和无人机数据处理模块;
所述电线杆结构模型数据库模块用于对电线杆进行分类并构建对应的电线杆数学结构模型,以及根据所述电线杆数学结构模型设计无人机的初始巡检路线;所述无人机飞行与测量模块用于获取所述电线杆的三维坐标数据和所述无人机的位姿数据并实现同步定位与建图;所述无人机数据处理模块用于根据所述电线杆的三维坐标数据和所述无人机的位姿数据拟合出电线杆的中心轴线以及计算出电线杆的倾斜度。
2.根据权利要求1所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:所述电线杆采用钢结构杆、木结构杆或钢筋混凝土结构杆,所述电线杆的简化模型为立于地面的圆柱体。
3.根据权利要求1所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:所述无人机飞行与测量模块包括无人机、前置摄像头、激光雷达和惯性测量单元,所述激光雷达、所述前置摄像头和所述惯性测量单元搭载在所述无人机上,所述无人机根据不同的电线杆选择不同的所述初始巡检路线,所述前置摄像头用于获取电线杆的图像数据,所述激光雷达用于获取电线杆的三维坐标数据,所述惯性测量单元用于提供所述无人机的角速度和线速度以获取无人机的位姿数据。
4.根据权利要求3所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:所述无人机为具有GPS系统的四旋翼无人机,所述无人机的运动模型为围绕电线杆做圆周飞行,所述电线杆的三维坐标数据基于所述前置摄像头的坐标系计算获取。
5.根据权利要求3所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:所述惯性测量单元包括加速计和陀螺仪,通过所述惯性测量单元不断更新无人机的运动模型和状态方程,改变无人机的巡检路线,以实现同步定位与建图进行地图数据采集。
6.根据权利要求5所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:所述前置摄像头获取的图像数据与所述惯性测量单元提供的角速度和线速度通过采用视觉惯导里程计进行融合,先对两帧采集图像数据的时间差内积分惯性测量单元数据解算出位姿数据,然后融合所述积分得到的位姿数据和根据所述前置摄像头获取的图像数据,得到视觉惯导里程计的无人机的位姿数据。
7.根据权利要求5所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:所述同步定位与建图包括观测点提取和数据关联;所述观测点提取是对所述电线杆的三维坐标数据和所述无人机的位姿数据进行观测点提取,所述观测点为无人机停下来进行测量的位置,通过所述数据关联判断该观测点是否为之前观测到的,如果不是,则将该观测点加入更新状态方程;所述数据关联是在不同时间、不同地点的传感器测量之间、传感器测量与地图特征之间或不同的地图特征之间建立对应的关系,以确定它们是否源于环境中同一物理实体的过程。
8.根据权利要求1所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:所述无人机数据处理模块对所述三维坐标数据进行切割、拼接、消除杂点以得到所需数据,根据所需数据按照初始设定的电线杆数学结构模型拟合出电线杆的中心轴线,计算所述中心轴线的倾斜度。
9.根据权利要求8所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:所述拟合出电线杆的中心轴线是通过无人机围绕电线杆在不同高度下做圆周飞行,实现无人机的同步定位与建图,获取多组同一高度下的电线杆的二维坐标数据,调整无人机飞行的高度,重复获取多组不同高度下的电线杆的二维坐标数据,利用最小二乘法将这些二维坐标数据拟合出多个不同高度上的拟合圆,获取这些拟合圆的圆心坐标数据,将不同高度上的拟合圆的圆心坐标数据拟合出三维空间中的直线方程,得到电线杆的中心轴线。
10.根据权利要求9所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,其特征在于:同一高度下的电线杆的二维坐标数据大于或等于10组。
说明书
技术领域
本发明涉及无人机测量领域,特别是利用无人机对电线杆倾斜度进行测量,具体地提供一种基于同步定位与建图(SLAM)的无人机监测电线杆倾斜度系统。
背景技术
电线杆就是电力线路中用于架设电线的杆,例如圆柱形木杆、圆柱形水泥杆和锥形水泥杆等,电线杆的垂直度对电力线路的正常安全可靠运行起着非常重要的作用,所以在施工安装时以及在运行一定周期时有必要对电线杆的倾斜度进行测量。
现有大部分对电线杆的倾斜度进行测量的方法仍处在人工阶段,例如基于仪器的经纬仪测量法、平面镜测量方法和倾角仪法等,这些传统方法大多存在着受地形条件影响较大,以及繁琐、不易操作且精度不高等问题。对于基于北斗定位的电线杆倾斜监测系统也需要人力安装监测终端以及配套设施,这些监测终端和配套设施位于野外,被日晒雨淋而容易损坏和无效,也增加测量成本和人工成本,并且工作效率低下。
中国专利CN201911074325.3公开了一种基于视觉的输电线路杆塔在线识别和倾斜检测方法,包括对无人机航拍图片进行角度校正,对获取的图像进行预处理并利用LSD算法提取线段特征;将得到的图片的线段特征进行过滤,得到滤除倾斜度小于预设阈值的线段,并将过滤后的满足预设线段融合标准的断续线段融合;根据最外侧塔脚特征寻找杆塔最外侧塔脚线段,并根据塔脚在杆塔中的位置进行杆塔区域的识别与定位;计算两条杆塔最外侧塔脚线段的中线与垂直方向的夹角,所述夹角即为计算的该方向杆塔的倾斜度,在杆塔周围的四个方向分别计算杆塔的倾斜度实现杆塔的倾斜检测。
中国专利CN202010603522.6公开了一种电线杆倾斜检测方法,包括获取图像边缘与地平面平行的待测图像;将所述待测图像输入至训练好的电线杆检测模型中,获取包含电线杆的最优候选框;对所述最优候选框的图像中的电线杆进行直线检测,得到电线杆的边缘线段;计算电线杆两侧的所述边缘线段与地平面的两个夹角,若两个所述夹角相等,则判断电线杆未发生倾斜;其中,所获取的待测图像可以采用带有陀螺仪传感器的无人机进行拍摄。
发明内容
针对现有技术在对电线杆的倾斜度进行测量时存在测量成本和人工成本较高、精度不高且效率低下等缺点,提供一种基于同步定位与建图的无人机监测电线杆倾斜度系统。
本发明解决其技术问题所采取的技术方案是:基于同步定位与建图的无人机监测电线杆倾斜度系统,用于测量电线杆的倾斜度,其特征在于:包括电线杆结构模型数据库模块、无人机飞线与测量模块和无人机数据处理模块;
所述电线杆结构模型数据库模块用于对电线杆进行分类并构建对应的电线杆数学结构模型,以及根据所述电线杆数学结构模型设计无人机的初始巡检路线;所述无人机飞线与测量模块用于获取所述电线杆的三维坐标数据和所述无人机的位姿数据并实现同步定位与建图;所述无人机数据处理模块用于根据所述电线杆的三维坐标数据和所述无人机的位姿数据拟合出电线杆的中心轴线以及计算出电线杆的倾斜度。
优选地,所述电线杆采用钢结构杆、木结构杆或钢筋混凝土结构杆,所述电线杆的简化模型为立于地面的圆柱体。
优选地,所述无人机飞线与测量模块包括无人机、前置摄像头、激光雷达和惯性测量单元,所述激光雷达、所述前置摄像头和所述惯性测量单元搭载在所述无人机上,所述无人机根据不同的电线杆选择不同的所述初始巡检路线,所述前置摄像头用于获取电线杆的图像数据,所述激光雷达用于获取电线杆的三维坐标数据,所述惯性测量单元用于提供所述无人机的角速度和线速度以获取无人机的位姿数据。
更优选地,所述无人机为具有GPS系统的四旋翼无人机,所述无人机的运动模型为围绕电线杆做圆周飞行,所述电线杆的三维坐标数据基于所述前置摄像头的坐标系计算获取。
更优选地,所述惯性测量单元包括加速计和陀螺仪,通过所述惯性测量单元不断更新无人机的运动模型和状态方程,改变无人机的巡检路线,以实现同步定位与建图进行地图数据采集。
更优选地,所述前置摄像头获取的图像数据与所述惯性测量单元提供的角速度和线速度通过采用视觉惯导里程计进行融合,先对两帧采集图像数据的时间差内积分惯性测量单元数据解算出位姿数据,然后融合所述积分得到的位姿数据和根据所述前置摄像头获取的图像数据,得到视觉惯导里程计的无人机的位姿数据。
更优选地,所述同步定位与建图包括包括观测点提取和数据关联;所述观测点提取是对所述电线杆的三维坐标数据和所述无人机的位姿数据进行观测点提取,所述观测点为无人机停下来进行测量的位置,通过所述数据关联判断该观测点是否为之前观测到的,如果不是,则将该观测点加入更新状态方程;所述数据关联是在不同时间、不同地点的传感器测量之间、传感器测量与地图特征之间或不同的地图特征之间建立对应的关系,以确定它们是否源于环境中同一物理实体的过程。
优选地,所述无人机数据处理模块对所述三维坐标数据进行切割、拼接、消除杂点以得到所需数据,根据所需数据按照初始设定的电线杆数学结构模型拟合出电线杆的中心轴线,计算所述中心轴线的倾斜度。
更优选地,所述拟合出电线杆的中心轴线是通过无人机围绕电线杆在不同高度下做圆周飞行,实现无人机的同步定位与建图,获取多组同一高度下的电线杆的二维坐标数据,调整无人机飞行的高度,重复获取多组不同高度下的电线杆的二维坐标数据,利用最小二乘法将这些二维坐标数据拟合出多个不同高度上的拟合圆,获取这些拟合圆的圆心坐标数据,将不同高度上的拟合圆的圆心坐标数据拟合出三维空间中的直线方程,得到电线杆的中心轴线。
更优选地,同一高度下的电线杆的二维坐标数据大于或等于10组。
本发明利用无人机和同步定位与建图技术,能够实时监测电线杆的情况,在最大程度上提升监测效能,降低监测的人力成本和设施成本,还能够实现在未知环境下且无定位系统时对电线杆的倾斜度进行测量,保证更加智能化、高效化和精确地监测电线杆,快速找到存在隐患的电线杆并通告,加强智能化的维护巡检工作;具有准确性、稳定性、易用性和功能性等优点,还能够提供用户简洁实用、友善的人机界面,操作简单、方便,减少管理成本,运行安全可靠,具有较好的容错能力。
附图说明
图1为本发明所述的基于同步定位与建图的无人机监测电线杆倾斜度系统的框架图;
图2为本发明所述的电线杆的简化模型示意图;
图3为本发明所述的电线杆在某一高度下的圆形横截面的示意图;
图4为本发明所述的无人机围绕电线杆做圆周飞行时在三维空间的拟合圆示意图;
图5为本发明所述的基于同步定位与建图的无人机监测电线杆倾斜度系统的流程图;
图6为本发明所述的仿真实验中的电线杆在不同高度上的拟合圆示意图;
图7为本发明所述的仿真实验中拟合出的中心轴线示意图。
具体实施方式
以下结合附图对本发明的内容作进一步说明。
如图1所示,本发明所述的基于同步定位与建图的无人机监测电线杆倾斜度系统,用于测量电线杆的倾斜度,具体包括电线杆结构模型数据库模块、无人机飞线与测量模块和无人机数据处理模块;所述电线杆结构模型数据库模块用于对电线杆进行分类并构建对应的电线杆数学结构模型,以及根据所述电线杆数学结构模型设计无人机的初始巡检路线;所述无人机飞线与测量模块用于获取所述电线杆的三维坐标数据和所述无人机的位姿数据并实现同步定位与建图进行地图数据采集;所述无人机数据处理模块用于根据所述电线杆的三维坐标数据和所述无人机的位姿数据拟合出电线杆的中心轴线以及计算出电线杆的倾斜度;本发明利用无人机和同步定位与建图技术,能够实时监测电线杆的情况,在最大程度上提升监测效能,降低监测的人力成本和设施成本,还能够实现在未知环境下且无定位系统时对电线杆的倾斜度进行测量,保证更加智能化、高效化和精确地监测电线杆,快速找到存在隐患的电线杆并通告,加强智能化的维护巡检工作。
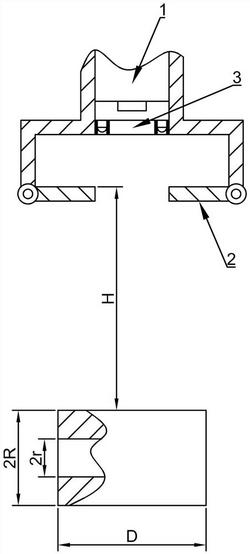
所述电线杆结构模型数据库模块用于对目前常见的几种电线杆进行分类,并构建合适的典型的对应的电线杆数学结构模型,以及根据不同的所述电线杆数学结构模型设计无人机的初始巡检路线;所述电线杆可以采用钢结构杆、木结构杆或钢筋混凝土结构杆,本发明优选采用钢筋混凝土结构杆,所述电线杆通常呈上小下大的梯形形状,本发明利用无人机和同步定位与建图技术可以忽略所述电线杆的粗细和具体形状,故所述电线杆可以简化为如图2所示的模型,呈立于地面的圆柱体,甚至可以把所述电线杆当作立于地面的一条直线。
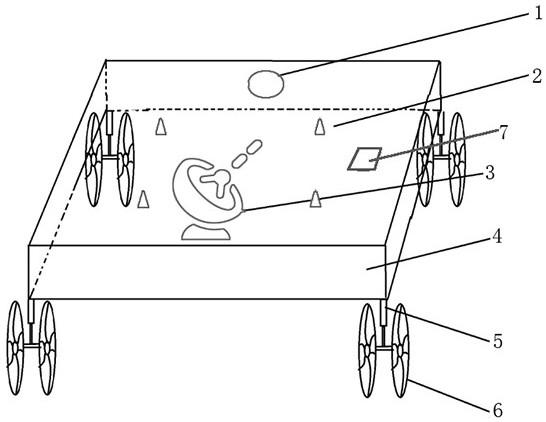
所述无人机飞线与测量模块包括无人机、前置摄像头、激光雷达和惯性测量单元,所述激光雷达、所述前置摄像头和所述惯性测量单元搭载在所述无人机上;所述无人机优选为具有GPS系统的四旋翼无人机,所述无人机根据不同的电线杆选择不同的所述初始巡检路线;设计无人机的运动模型为围绕电线杆做圆周飞行。所述前置摄像头用于获取电线杆的图像数据,特别是实时图像数据;所述激光雷达用于获取电线杆的三维坐标数据,所述电线杆的三维坐标数据具体可以基于所述前置摄像头的坐标系计算获取,形成点云坐标数据。
所述惯性测量单元用于提供所述无人机的角速度和线速度以获取无人机的位姿数据,从而不断更新无人机的运动模型和状态方程,改变无人机的巡检路线,以实现同步定位与建图进行地图数据采集;所述惯性测量单元通常包括加速计和陀螺仪,通过积分得到所述无人机的角速度和线速度,再通过二次积分计算出无人机的位置和姿态信息即位姿数据,但是会受到频率限制、数据精度等造成真值和积分数据存在一定的偏差,所述惯性测量单元在开始运行后,即使无人机静止,积分得到的线速度不能得到精准的零值,无人机的位姿数据仍然会改变;因此,本发明采用视觉惯导里程计(VIO)将所述前置摄像头获取的图像数据与所述惯性测量单元提供的角速度和线速度进行融合,具体先对两帧采集图像数据的时间差内积分惯性测量单元数据解算出位姿数据,然后融合所述积分得到的位姿数据和根据所述前置摄像头获取的图像数据,得到视觉惯导里程计的无人机的位姿数据,这样既能减低因运动过快造成无法计算出两帧的位姿的影响,又能减低惯性测量单元积分得到的结果会积累误差的影响。首先获取所述无人机飞行在某一时刻、某一高度下的位姿数据,然后调整所述无人机飞行的高度,重复之前的围绕电线杆做圆周飞行,获取不同时刻、不同高度下的所述电线杆的三维坐标数据和所述无人机的位姿数据。
其中,所述同步定位与建图(SLAM)包括包括观测点提取和数据关联;所述观测点提取是对所述电线杆的三维坐标数据和所述无人机的位姿数据进行观测点提取,所述观测点为无人机在特定的位置停下来进行测量的位置,通过所述数据关联判断该观测点是否为之前观测到的,如果不是,则将该观测点加入更新状态方程;所述数据关联是在不同时间、不同地点的传感器测量之间、传感器测量与地图特征之间或不同的地图特征之间建立对应的关系,以确定它们是否源于环境中同一物理实体的过程。
所述无人机数据处理模块利用设计的数据处理方法对所述三维坐标数据进行切割、拼接、消除杂点以得到所需数据,根据所需数据按照初始设定的电线杆数学结构模型在专业的数据处理软件拟合出电线杆的中心轴线,计算所述中心轴线的倾斜度,即所述中心轴线与地面的夹角。
为了拟合出电线杆在某一高度上的拟合圆,将电线杆简化为如图2所示的圆柱形,则电线杆在某一高度下的横截面近似为如图3所示的圆形。如图4所示,无人机围绕电线杆做圆周飞行时在三维空间的拟合圆利用最小二乘法计算出某一高度下的圆形横截面的圆心坐标数据和半径:通过无人机在某一高度上围绕电线杆做圆周飞行,获得同一高度下的N组电线杆的二维坐标(X,Y)数据,优选N大于或等于10,设该高度上的圆的标准方程为:
其中,N是参与拟合的二维坐标(X,Y)数据的总个数,i在[0,N]范围内取值,X和Y分别是二维坐标(X,Y)的横坐标和纵坐标,a为拟合圆的圆心横坐标,b为拟合圆的圆心横坐标。
考虑会存在误差点,所以通过最小二乘法拟合出圆心坐标数据和半径后,遍历每个坐标到圆心的距离,若与半径的差值超过一定大小,就认定为误差值,需要去除后使用剩余的点重新拟合圆,这样能降低误差值对拟合圆的影响。
为了计算电线杆的倾斜度,通过无人机围绕电线杆在不同高度下做圆周飞行,实现无人机的同步定位与建图,获取多组同一高度下的电线杆的二维坐标数据,调整无人机飞行的高度,重复获取多组不同高度下的电线杆的二维坐标数据,利用最小二乘法将这些二维坐标数据拟合出多个不同高度上的拟合圆,获取这些拟合圆的圆心坐标数据,将不同高度上的拟合圆的圆心坐标数据拟合出三维空间中的直线方程,得到电线杆的中心轴线,计算所述中心轴线的倾斜方向和倾斜度,所述倾斜度为所述中心轴线与地面的夹角。
当电线杆垂直于地面上,即其倾斜度为90°,所述中心轴线也就是法线;为了拟合出所述中心轴线在三维空间中的直线方程,首先拟合出z坐标轴的z0数据与x坐标轴的x0数据的直线,设为Z0X0方程,将z0代入得到的Z0X0方程得到x1数据;同理,将拟合出z坐标轴的z0数据与y坐标轴的y0数据的直线,设为Z0Y0方程,将z0代入得到的Z0Y0方程得到y1数据;接着,拟合y1数据和x1数据的直线,设为Y1X1方程,将y1数据代入Y1X1方程得到x2;在该过程中,得到以下Z0Y0方程和Y1X1方程:
该方程组即为拟合出所述中心轴线的直线方程;
得到以上Z0Y0方程和Y1X1方程后,取方程中的两点,如z=zi和z=zj的两点,代入Z0Y0方程和Y1X1方程后得到(xi,yi,zi)和(xj,yj,zj),由以下公式计算出电线杆的倾斜度θ;
所述中心轴线的倾斜方向为(xj-xi,yj-yi),其含义为两点的连线投影在xy平面的方向,能表达出电线杆是基于水平面的倾斜方向。
本发明所述的基于同步定位与建图的无人机监测电线杆倾斜度系统具有准确性、稳定性、易用性和功能性等优点,对电线杆倾斜度的测量能够达到较高精度,在正常情况下能够正常工作,在意外情况下亦能适当地处理以使可能导致的损失最小,在环境因素如风力、光照等或者无人机本身因素如偶尔的抖动等使得无人机测量出现偏差时,系统可以很通过设定的不同的噪声滤除方程来对数据进行处理,得到更为准确的数据,减低环境和无人机本身因素造成的影响;还能够提供用户简洁实用、友善的人机界面,操作简单、方便,减少管理成本,运行安全可靠,具有较好的容错能力。
如图5所述,本发明所述的基于同步定位与建图的无人机监测电线杆倾斜度系统测量电线杆倾斜度的具体流程为:无人机围绕电线杆做圆周飞行;通过激光雷达获取电线杆的三维坐标数据和无人机的位姿数据;利用最小二乘法将同一高度上的三维坐标数据拟合成拟合圆,并获取该拟合圆的圆心坐标数据;将不同高度上的拟合圆的圆心坐标数据拟合成三维空间中的直线方程,得到电线杆的中心轴线;根据电线杆的中心轴线,计算电线杆的倾斜度。
本发明举例通过在MATLAB 仿真平台以及Gazebo仿真平台进行仿真实验检验所述基于同步定位与建图的无人机监测电线杆倾斜度系统的测量精度:
实验过程主要通过主要的三个仿真程序实现,分别是Gazebo仿真平台构建仿真的实验环境,四旋翼无人机平台模型搭建,MATLAB计算电线杆倾斜度算法;Gazebo仿真平台构建完整的无人机视觉目标跟踪系统仿真实验地图;无人机环绕电线杆做圆周飞行,同步定位与建图实现仿真功能;MATLAB仿真平台处理无人机数据以及倾斜度计算程序,得到电线杆三维坐标数据,然后将各个高度的数据分别拟合出拟合圆,通过最小二乘法拟合出圆心坐标数据和半径;MATLAB仿真平台根据最小二乘法原理用自带的polyfit函数对圆心坐标数据进行拟合,拟合出最为近似的曲线,计算出电线杆倾斜度。
设计若干同一直线下的数据,增加噪声值,进行拟合三维直线求得倾斜度实验,分析计算的倾斜度的效果。实验的数据集信息为90°倾斜角度,即没有倾斜,并经过原点(1,1,0)处。由于该系统只会获得电线杆若干高度的圆心坐标数据,所以在本实验下只设立6个数据进行计算,不同信噪比下倾斜度和倾斜方向的计算结果列入表1中。
表1:不同信噪比下倾斜度和倾斜方向的计算结果
由表1可看出噪声越高,数据坐标越偏离直线方程,使得拟合的倾斜度越偏离理论值,导致误差值越大;当不存在较大噪声的影响下,使用本发明所述的系统所拟合的倾斜度精确性较高,但受噪声影响较大。
如图6所示,本发明拟合出所述电线杆在不同高度上的拟合圆,将多个拟合圆的圆心坐标数据拟合出如图7所示的中心轴线,进行计算所述电线杆的倾斜度,电线杆仿真模型设定的倾斜度为90°,即应该为垂直状态,计算出拟合中心轴线的倾斜度为87.9802°,倾斜方向为(1.0,0.56)。拟合得出的倾斜度87.9802°与理论值90°之间的偏差率为2.24%,分析造成误差的原因是:仿真实验下SLAM计算的定位结果准确性不够高,导致有误差累积;激光雷达获取电线杆坐标时,距离较远也会存在误差累积,使得计算出的电线杆坐标偏差较大,并且难以靠后端进行数据优化;后续在MATLAB中拟合倾斜度的算法过于依赖准确性高的数据,容错性不够高,造成鲁棒性低。
MATLAB模拟仿真实验证明,本发明所述的基于同步定位与建图的无人机监测电线杆倾斜度系统具有较高的倾斜度测量精度。
以上内容是对本发明所述的基于同步定位与建图的无人机监测电线杆倾斜度系统作出的进一步详细说明,并非对本发明的范围进行限定,在不脱离本发明构思的前提下,本领域普通技术人员依据本发明的技术方案做出的各种变形和改进,均应视为属于本发明的保护范围。
基于同步定位与建图的无人机监测电线杆倾斜度系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0