







专利摘要
基于随机共振和移动最小二乘的弱振荡衰减信号参数识别,首先是针对振荡衰减冲击信号的特点采用信息熵作为免疫优化测度对参数调整随机共振进行算法改进,解决了振荡衰减信号信噪比定量化测度难以计算的问题,然后采用两步随机共振和移动最小二乘拟合的方法获得微弱振荡衰减信号中的故障频率、振荡频率和阻尼,识别滚动轴承的原发性故障,对滚动轴承等旋转机械的运行状态监测和维护具有重要意义,也可以用于模式识别等应用。
权利要求
1.基于随机共振和移动最小二乘的弱振荡衰减信号参数识别,其特征在于,包括以下步骤:
第一步,对采集的振动加速度信号进行随机共振处理,获得振动衰减信号的故障频率,
先预估计振动信号的故障频率,在估计范围内,选用适用于大参数信号的参数调整随机共振对采集的振动加速度信号进行处理,
其中,参数调整随机共振过程中,针对振荡衰减冲击信号的特点,采用基于信息熵测度和免疫优化算法,获得最优的随机共振结果;
第二步,根据第一步随机共振的结果,对原始振动加速度信号进行截取,并进行二次随机共振获得振荡衰减频率,
根据第一步随机共振的结果,获得每个振荡衰减信号出现的位置信息和周期信息,对原始采集的振动加速度信号进行加窗截取操作,
对截取的信号进行基于信息熵测度和免疫优化算法的二次参数调整随机共振操作,获取振荡衰减信号的振荡衰减频率;
第三步,利用第二步获取的振荡衰减信号振荡衰减频率作为参数,采用移动最小二乘方法进行带参信号反演,获得振荡衰减信号阻尼,
根据第二步随机共振的结果,获得每个振荡衰减信号出现的位置信息和周期信息,
根据获得的位置信息和周期信息设置移动最小二乘的窗长和初始位置,然后进行移动最小二乘方法拟合,获得振荡衰减信号的阻尼及幅值。
说明书
技术领域
本发明属于机械故障诊断领域,具体涉及基于随机共振和移动最小二乘的弱振荡衰减信号参数识别。
背景技术
振荡衰减信号是常见的旋转机械如滚动轴承、齿轮故障表征信号。对于早期故障时微弱振荡衰减信号的检测,目前随机共振是国内外关于弱信号特征提取的主要解决办法,然而随机共振的研究基本上局限在时域无限的余弦信号检测上,而振荡衰减信号具有时域紧支的特点,传统的随机共振应用于微弱振荡衰减信号需要解决定量化评价参数调整随机共振效果的问题。作为余弦信号等测度的信噪比由于振荡衰减信号的频域不紧支的特点难以计算。另一方面,随机共振获得的一般是振荡衰减信号的故障频率,从而判断表现性故障。为了能够获得原发性故障以及故障程度的定量化信息,需要进一步获得振荡衰减信号的阻尼、振荡频率和幅值。然而随机共振之后信号变成了矩形信号同时也有了不同程度的非线性放大。因此需要研究振荡衰减信号的反演方法。
发明内容
为了克服上述现有技术的缺点,本发明的目的在于提供基于随机共振和移动最小二乘的弱振荡衰减信号参数识别,反演得到振荡衰减信号的故障频率、振荡衰减频率及阻尼,识别滚动轴承的原发性故障,对滚动轴承等旋转机械的运行状态监测和维护具有重要意义。
为了达到上述目的,本发明采用的技术方案为:
基于随机共振和移动最小二乘的弱振荡衰减信号参数识别,包括以下步骤:
第一步,对采集的振动加速度信号进行随机共振处理,获得振动衰减信号的故障频率,
先预估计振动信号的故障频率,在估计范围内,选用适用于大参数信号的参数调整随机共振对采集的振动加速度信号进行处理,
其中,参数调整随机共振过程中,针对振荡衰减冲击信号的特点,采用基于信息熵测度和免疫优化算法,获得最优的随机共振结果;
第二步,根据第一步随机共振的结果,对原始振动加速度信号进行截取,并进行二次随机共振获得振荡衰减频率,
根据第一步随机共振的结果,获得每个振荡衰减信号出现的位置信息和周期信息,对原始采集的振动加速度信号进行加窗截取操作,
对截取的信号进行基于信息熵测度和免疫优化算法的二次参数调整随机共振操作,获取振荡衰减信号的振荡衰减频率;
第三步,利用第二步获取的振荡衰减信号振荡衰减频率作为参数,采用移动最小二乘方法进行带参信号反演,获得振荡衰减信号阻尼,
根据第二步随机共振的结果,获得每个振荡衰减信号出现的位置信息和周期信息,
根据获得的位置信息和周期信息设置移动最小二乘的窗长和初始位置,然后进行移动最小二乘方法拟合,获得振荡衰减信号的阻尼及幅值。
本发明的优点为:选用信息熵作为参数调整随机共振的免疫优化测度,解决了振荡衰减信号信噪比测度难以计算的问题,获得准确的随机共振效果。通过两次随机共振,可以提取出信号的故障频率、振荡衰减频率、阻尼及幅值信息,能够给测试人员提供诊断原发性故障及定量化评判故障程度的依据。
附图说明
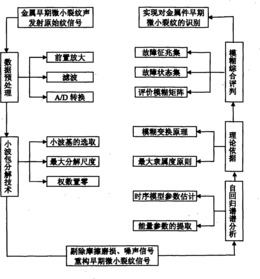
图1为本发明流程图。
图2为采集的振动加速度信号图。
图3为第一次参数调整随机共振结果图。
图4为截取的振动加速度信号图。
图5为第一次参数调整随机共振结果图。
图6为滚动轴承峰值指标效果图。
具体实施方式
下面结合附图对本发明做详细描述。
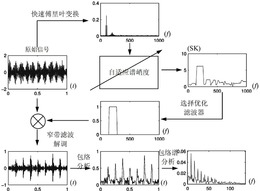
参照附图1,基于随机共振和移动最小二乘的弱振荡衰减信号参数识别,包括以下步骤:
第一步,对如图2所示采集的振动加速度信号进行随机共振处理,获得振动衰减信号的故障频率、位置信息及振荡衰减信号个数,
开始,读取数据,先预估计振动信号的故障频率,进行参数初始化,在估计范围内,选用适用于大参数信号的参数调整随机共振对采集的振动加速度信号进行处理,
其中,参数调整随机共振过程中,针对振荡衰减冲击信号的特点,采用基于信息熵测度和免疫优化算法,获得最优的随机共振结果,从而获得振动衰减信号的故障频率、位置信息及振荡衰减信号个数信息,如图3所示T0为振动衰减信号的故障周期,τ0为振动衰减信号的位置信息;
第二步,根据第一步随机共振的结果,对原始振动加速度信号进行截取,并进行二次随机共振获得振荡衰减频率,
根据第一步随机共振的结果,获得每个振荡衰减信号出现的位置信息和周期信息,对原始采集的振动加速度信号进行截取信号,截取信号如图4所示,
估计振荡频率的范围,并在该范围内,对截取信号进行基于信息熵测度和免疫优化算法的二次参数调整随机共振操作,获取振荡衰减信号的振荡衰减频率,结果如图5所示;
第三步,利用第二步获取的振荡衰减信号振荡衰减频率作为参数,采用移动最小二乘方法进行带参信号反演,获得振荡衰减信号阻尼,拟合结果如图6所示,
根据第一步随机共振结果获得的故障频率、位置信息及振荡衰减信号个数信息设置移动最小二乘的窗长和初始位置,利用第二步获取的振荡衰减信号振荡衰减频率作为移动最小二乘方法已知参数对截取信号进行拟合,获得振荡衰减信号的阻尼及幅值。
基于随机共振和移动最小二乘的弱振荡衰减信号参数识别专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0