









专利摘要
本实用新型公开一种激光波前测量仪,包括电控旋转台、柱透镜、光电传感器及数据处理器,柱透镜对待测激光进行沿垂直母线方向的一维聚焦,柱透镜随着电控旋转台的旋转而旋转,数据处理器基于获取并保存的光强分布图像确定待测激光的波前分布信息。因柱透镜可对激光进行沿垂直母线方向的一维聚焦,其聚焦光斑分布包含了垂直母线方向的一维频谱分布以及沿母线方向的空间分布,通过旋转柱透镜,获取不同母线方向的聚焦光斑,可以获取到具有唯一性的激光光场相位分布,因此,利用包含具有一维聚焦功能的柱透镜的激光波前测量仪,可获取到具有唯一性的相位分布,利用具有唯一性的相位分布可还原出唯一性的波前分布信息,还原结果准确。
权利要求
1.一种激光波前测量仪,其特征在于,所述激光波前测量仪包括:电控旋转台、柱透镜、光电传感器及数据处理器;
所述柱透镜搭载于所述电控旋转台上,用于对待测激光进行沿垂直母线方向的一维聚焦;
所述光电传感器位于所述柱透镜的后焦面上,用于获取所述柱透镜的后焦面上形成的光强分布图像;
所述电控旋转台,用于带动所述柱透镜,并使所述柱透镜随着所述电控旋转台的旋转而旋转;
所述数据处理器与所述电控旋转台相连接,用于发送旋转指令给所述电控旋转台;
所述数据处理器与所述光电传感器相连接,用于接收并保存预置数量的光强分布图像,并基于所述预置数量的光强分布图像确定所述待测激光的波前分布信息。
2.根据权利要求1所述的激光波前测量仪,其特征在于,所述光电传感器为二维光电传感器。
3.根据权利要求2所述的激光波前测量仪,其特征在于,所述二维光电传感器为面阵电荷耦合元件或面阵互补金属氧化物半导体。
4.根据权利要求1所述的激光波前测量仪,其特征在于,所述数据处理器为计算机或片上系统。
5.根据权利要求1所述的激光波前测量仪,其特征在于,所述激光波前测量仪还可包括反射镜,所述反射镜用于改变从所述柱透镜到所述光电传感器的光路传输方向。
说明书
技术领域
本实用新型属于激光技术领域,尤其涉及一种激光波前测量仪。
背景技术
现有的激光光束质量分析仪主要通过一个精密直线导轨搭载一个二维光电传感器记录激光光束在不同距离的光强分布,并基于衍射理论的迭代算法可以推演出激光光束相位分布。但是,因为推演出的激光光束相位分布是不唯一的,所以利用该激光光束相位分布还原的波前分布信息也是不具有唯一性的,还原结果不准确。
实用新型内容
本实用新型的主要目的在于提出一种激光波前测量仪,旨在解决现有的激光光束质量分析仪还原的波前分布信息不具有唯一性,还原结果不准确的技术问题。
为实现上述目的,本实用新型提供一种激光波前测量仪,所述激光波前测量仪包括:电控旋转台、柱透镜、光电传感器及数据处理器;
所述柱透镜搭载于所述电控旋转台上,用于对待测激光进行沿垂直母线方向的一维聚焦;
所述光电传感器位于所述柱透镜的后焦面上,用于获取所述柱透镜的后焦面上形成的光强分布图像;
所述电控旋转台,用于带动所述柱透镜,并使所述柱透镜随着所述电控旋转台的旋转而旋转;
所述数据处理器与所述电控旋转台相连接,用于发送旋转指令给所述电控旋转台;
所述数据处理器与所述光电传感器相连接,用于接收并保存预置数量的光强分布图像,并基于所述预置数量的光强分布图像确定所述待测激光的波前分布信息。
进一步的,所述光电传感器为二维光电传感器。
进一步的,所述二维光电传感器为面阵电荷耦合元件或面阵互补金属氧化物半导体。
进一步的,所述数据处理器为计算机或片上系统。
进一步的,所述激光波前测量仪还可包括反射镜,所述反射镜用于改变从所述柱透镜到所述光电传感器的光路传输方向。
本实用新型提供一种激光波前测量仪,该激光波前测量仪包括:电控旋转台、柱透镜、光电传感器及数据处理器,柱透镜搭载于电控旋转台上,用于对待测激光进行沿垂直母线方向的一维聚焦,光电传感器位于柱透镜的后焦面上,用于获取柱透镜的后焦面上形成的光强分布图像,电控旋转台,用于带动柱透镜,并使柱透镜随着电控旋转台的旋转而旋转,数据处理器与电控旋转台相连接,用于发送旋转指令给电控旋转台,数据处理器与光电传感器相连接,用于接收并保存预置数量的光强分布图像,并基于预置数量的光强分布图像确定待测激光的波前分布信息。因柱透镜可对激光进行沿垂直母线方向的一维聚焦,其聚焦光斑分布包含了垂直母线方向的一维频谱分布以及沿母线方向的空间分布,通过旋转柱透镜,获取不同母线方向的聚焦光斑,可以获取到具有唯一性的激光光场相位分布,因此,利用包含具有一维聚焦功能的柱透镜的激光波前测量仪,可获取到具有唯一性的相位分布,利用具有唯一性的相位分布可还原出唯一性的波前分布信息,还原结果准确。
附图说明
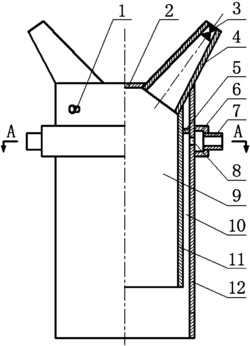
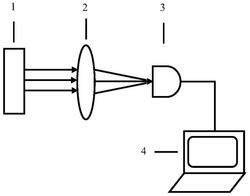
图1为本实用新型第一实施例提供的一种激光波前测量仪的结构示意图;
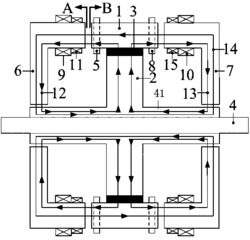
图2为本实用新型第二实施例提供的一种激光波前测量仪的结构示意图。
具体实施方式
为使得本实用新型的实用新型目的、特征、优点能够更加的明显和易懂,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而非全部实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
为了说明本实用新型的技术方案,下面通过具体实施例来进行说明。
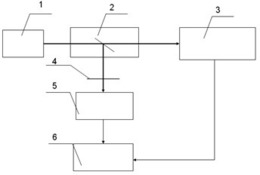
为了更好的理解本实用新型,请参阅图1所示的第一实施例提供的一种激光波前测量仪的结构示意图,激光波前测量仪包括:电控旋转台10、柱透镜20、光电传感器30及数据处理器40;
柱透镜20搭载于电控旋转台10上,用于对待测激光进行沿垂直母线方向的一维聚焦;
光电传感器30位于柱透镜20的后焦面上,用于获取柱透镜20的后焦面上形成的光强分布图像;
电控旋转台10,用于带动柱透镜20,并使柱透镜20随着电控旋转台10的旋转而旋转;
数据处理器40与电控旋转台10相连接,用于发送旋转指令给电控旋转台10;
数据处理器40与光电传感器30相连接,用于接收并保存预置数量的光强分布图像,并基于预置数量的光强分布图像确定待测激光的波前分布信息。
其中,光电传感器30为二维光电传感器30,二维光电传感器30为面阵电荷耦合元件或面阵互补金属氧化物半导体。
其中,数据处理器40为计算机或片上系统,其具有计算能力。
在本实用新型实施例中,提供了一种激光波前测量仪,该激光波前测量仪包括:电控旋转台10、柱透镜20、光电传感器30及数据处理器40,柱透镜20搭载于电控旋转台10上,用于对待测激光进行沿垂直母线方向的一维聚焦,光电传感器30位于柱透镜20的后焦面上,用于获取柱透镜20的后焦面上形成的光强分布图像,电控旋转台10,用于带动柱透镜20,并使柱透镜20随着电控旋转台10的旋转而旋转,数据处理器40与电控旋转台10相连接,用于发送旋转指令给电控旋转台10,数据处理器40与光电传感器30相连接,用于接收并保存预置数量的光强分布图像,并基于预置数量的光强分布图像确定待测激光的波前分布信息。因柱透镜20可对激光进行沿垂直母线方向的一维聚焦,其聚焦光斑分布包含了垂直母线方向的一维频谱分布以及沿母线方向的空间分布,通过旋转柱透镜20,获取不同母线方向的聚焦光斑,可以获取到具有唯一性的激光光场相位分布,因此,利用包含具有一维聚焦功能的柱透镜20的激光波前测量仪,可获取到具有唯一性的相位分布,利用具有唯一性的相位分布可还原出唯一性的波前分布信息,还原结果准确。
进一步的,请参阅图2所示的第二实施例提供的一种激光波前测量仪的结构示意图,激光波前测量仪包括:电控旋转台10、柱透镜20、光电传感器30、数据处理器40及反射镜50;
反射镜用于改变从柱透镜20到光电传感器30的光路传输方向。
在本实用新型实施例中,利用上述反射镜50可以改变从柱透镜20到光电传感器30的光路传输方向,从而折叠整个系统的大小,使得系统更加小型化。
其中,上述激光波前测量仪的测量流程主要为:
数据处理器40发送旋转指令至电控旋转台10,电控旋转台10上的柱透镜20随着电控旋转台10的旋转而旋转;光电传感器30待电控旋转台10旋转稳定后,获取待测激光透过柱透镜20后于柱透镜20的后焦面上形成的光强分布图像;光电传感器30在获取光强分布图像后,将光强分布图像发送至数据处理器40保存;数据处理器40在保存光强分布图像后,发送旋转指令至电控旋转台10,并等待下一次光强分布图像的发送;数据处理器40保存预置数量光强分布图像后,基于预置数量的光强分布图像确定待测激光的波前分布信息。
其中,数据处理器40保存预置数量光强分布图像后,基于预置数量的光强分布图像确定待测激光的波前分布信息,具体包括以下步骤:
第1步,初始化待测激光的激光光场L(x,y),将激光光场L(x,y)设置为一个随机非零分布,其中,x是激光光场L(x,y)所在二维平面的笛卡尔坐标系的横坐标,y是激光光场L(x,y)所在二维平面的笛卡尔坐标系的纵坐标;
第2步,根据预置的第n次旋转后柱透镜20的相位调制函数对激光光场L(x,y)进行相位调制计算,得到调制后的激光光场Ln(x,y);
其中,相位调制函数为Φn(x,y)=-(cosθnx+sinθny)2π/λf,θn是第n次旋转后的柱透镜20的光轴与水平面的夹角,λ是待测激光波长,f是柱透镜20的焦距。
其中,得到的调制后的激光光场Ln(x,y)为:
Ln(x,y)=L(x,y)exp(-jΦn(x,y))。
第3步,利用衍射理论对调制后的激光光场Ln(x,y)进行计算,得到传播了预设距离后的光场分布Dn(x,y),其中,光场分布Dn(x,y)包括强度分布和相位分布,预设距离为柱透镜20焦距;
具体的,衍射理论计算公式为:
其中,kx是二维傅里叶变换F对应的x方向的空间角频率,ky是二维傅里叶变换F对应的y方向的空间角频率,其中d是所述预设距离,因为所述预设距离为所述柱透镜焦距,所以d=f。
第4步,利用预设的强度约束公式对光场分布Dn(x,y)进行强度约束,将光场分布Dn(x,y)中的强度分布替换为光强分布图像中的光强分布,得到强度约束后的光场分布D'n(x,y);
具体的:基于二维光电探测器第n次旋转后记录的光强分布An(x,y),进行强度约束,得到D'n(x,y)。
其中,phase()表示提取相位,该操作相当于保留Dn(x,y)的相位分布,用光强分布An(x,y)替代其强度分布。
第5步,基于衍射理论对光场分布D'n(x,y)进行计算,得到传播预设距离前的光场分布L'n(x,y);
其中,
第6步,基于相位调制函数及光场分布L'n(x,y)确定调制前的激光光场L”n(x,y);
具体的,根据第n次旋转后柱透镜20的相位调制函数Φn(x,y),得到调制前的激光光场L”n(x,y)。
L”n(x,y)=Ln(x,y)exp(jΦn(x,y))。
第7步,计算激光光场L”n(x,y)的平均分布,平均分布 将平均分布赋值给激光光场L(x,y),并将预置的计数器的数值j加1,其中,j表示数据处理器40的当前迭代次数,j的初始值为0;
第8步,若j等于预设阈值,则将当前激光光场L(x,y)作为最终结果输出,确定为待测激光的波前分布信息;
第9步,若j小于预设阈值,计算误差ε,若误差ε大于预设误差ε0,则返回执行第2步;
若误差ε小于预设误差ε0,则将当前激光光场L(x,y)作为最终结果输出,确定为待测激光的波前分布信息;
其中,误差ε为光场分布Dn(x,y)的强度分布与光强分布图像中的光强分布的欧氏距离的平方和。
其中,图1及图2中的点画线表示激光的传输光路。
在本实用新型实施例中,因柱透镜20可对激光进行沿垂直母线方向的一维聚焦,其聚焦光斑分布包含了垂直母线方向的一维频谱分布以及沿母线方向的空间分布,通过旋转柱透镜20,获取不同母线方向的聚焦光斑,可以获取到具有唯一性的激光光场相位分布,因此,利用包含具有一维聚焦功能的柱透镜20的激光波前测量仪,可获取到具有唯一性的相位分布,利用具有唯一性的相位分布可还原出唯一性的波前分布信息,还原结果准确。
在本申请所提供的几个实施例中,应该理解到,所揭露的装置和方法,可以通过其它的方式实现。
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
以上为对本实用新型所提供的一种激光波前测量仪的描述,对于本领域的技术人员,依据本实用新型实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本实用新型的限制。
一种激光波前测量仪专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0