









专利摘要
本发明属于大行程高精度定位平台相关技术领域,其公开了一种二自由度气浮运动平台,其包括大理石底座、第一X向运动组件、第二X向运动组件及Y向运动组件,所述第一X向运动组件及所述第二X向运动组件分别设置在所述大理石底座相背的两端,所述Y向运动组件的两端分别连接于所述第一X向运动组件及所述第二X向运动组件;所述第一X向运动组件包括设置在所述大理石底座上的第一X向大理石导轨、套在所述第一X向大理石导轨上的第一X向滑块及第一X向水平气浮块,所述第一X向水平气浮块设置在所述第一X向滑块上,其用于自动调节所述第一X向滑块与所述第一X向大理石导轨之间的气膜厚度。本发明通过气浮块保持气膜厚度不变,提高定位精度。
权利要求
1.一种二自由度气浮运动平台,其包括大理石底座、第一X向运动组件、第二X向运动组件及Y向运动组件,其特征在于:
所述第一X向运动组件及所述第二X向运动组件分别设置在所述大理石底座相背的两端,所述Y向运动组件的两端分别连接于所述第一X向运动组件及所述第二X向运动组件,所述第一X向运动组件、所述第二X向运动组件及所述Y向运动组件构成了H型结构;所述第一X向运动组件及所述第二X向运动组件通过带动所述Y向运动组件运动来带动工作台沿X方向运动,所述Y向运动组件用于带动所述工作台沿Y向运动,从而实现二自由度运动平台带动工作台沿X轴与Y轴两个方向水平移动;
所述第一X向运动组件包括设置在所述大理石底座上的第一X向大理石导轨、套在所述第一X向大理石导轨上的第一X向滑块及第一X向水平气浮块,所述第一X向水平气浮块设置在所述第一X向滑块朝向所述第一X向大理石导轨的侧面上,其用于自动调节所述第一X向滑块与所述第一X向大理石导轨之间的气膜厚度,以保持气膜厚度不变。
2.如权利要求1所述的二自由度气浮运动平台,其特征在于:所述第一X向滑块连接于所述Y向运动组件;通气时,所述第一X向水平气浮块通过自动调节所述第一X向滑块与所述第一X向大理石导轨之间的气膜间隙,以保持所述气膜厚度不变。
3.如权利要求1所述的二自由度气浮运动平台,其特征在于:所述第一X向运动组件包括X向直线电机支撑件、X向直线电机定子、X向直线电机动子、X向直线电机动子连接板、第一X向垂向气浮板及X水平向气浮块连接板,所述第一X向大理石导轨及所述X向直线电机支撑件间隔固定在所述大理石底座上;所述X向直线电机定子设置在所述X向直线电机支撑件上,其与所述X向直线电机动子活动连接;所述X向直线电机动子与所述X向直线电机动子连接板相连接;所述X向直线电机动子连接板连接于所述第一X向垂向气浮板的一端,所述X水平向气浮块连接板连接于所述第一X向垂向气浮板的另一端。
4.如权利要求3所述的二自由度气浮运动平台,其特征在于:所述X向直线电机动子、所述X向直线电机动子连接板、所述第一X向垂向气浮板及所述X水平向气浮块连接板构成所述第一X向滑块。
5.如权利要求4所述的二自由度气浮运动平台,其特征在于:所述X向直线电机动子连接板及所述X水平向气浮块连接板分别位于所述第一X向大理石导轨的左右两侧;所述第一X向垂向气浮板水平设置,且其位于所述第一X向大理石导轨的上方。
6.如权利要求3所述的二自由度气浮运动平台,其特征在于:所述第一X向水平气浮块设置在所述X水平向气浮块连接板朝向所述第一X向大理石导轨的表面上。
7.如权利要求3所述的二自由度气浮运动平台,其特征在于:所述第一X向运动组件还包括两个限位缓冲块,两个所述限位缓冲块分别设置在所述第一X向大理石导轨相背的两端,以用于对所述第一X向滑块的移动进行机械限位及缓冲。
8.如权利要求3所述的二自由度气浮运动平台,其特征在于:所述第一X向运动组件还包括X向光栅尺读数头及X向光栅尺,所述X向光栅尺读数头设置在所述X水平向气浮块连接板的下部,其与所述X向光栅尺相对设置;所述X向光栅尺设置在所述大理石底座上,其邻近所述第一X向大理石导轨设置。
9.如权利要求1-7任一项所述的二自由度气浮运动平台,其特征在于:所述第一X向运动组件的结构与所述第二X向运动组件的结构相同。
10.如权利要求1-7任一项所述的二自由度气浮运动平台,其特征在于:所述Y向运动组件包括Y向导轨、回形结构状的Y向滑块、分别连接于所述Y向滑块的Y向直线电机及Y向光栅尺读数头、设置在所述Y向导轨上的Y向光栅尺、以及多个设置在所述Y向滑块上的水平气浮块,所述Y向导轨套设在所述Y向滑块内,所述Y向直线电机及所述Y向光栅尺读数头位于所述Y向导轨与所述Y向滑块之间,多个所述水平气浮块分别位于所述Y向导轨的相背的两侧。
说明书
技术领域
本发明属于大行程高精度定位平台相关技术领域,更具体地,涉及一种二自由度气浮运动平台。
背景技术
超精密工作台在装备制造领域占有重要地位,其是精密测量、精密加工、半导体制造的基础。目前常见的超精密工作台主要使用气浮导轨,气浮导轨是气浮轴承的一种,其用气体作为润滑介质,将工作台相对运动部件隔开,极大减小了系统的摩擦,可显著提高定位精度、速度和加速度。随着精密制造领域对超精密工作台的要求提高,气浮导轨的刚度、稳定性和位置都对定位精度产生了一定影响,由于气浮导轨的气膜厚度一般在微米级,气浮封闭型导轨在工作过程中,由于装配应力释放、温度变化等会导致气浮导轨发生变形而使得气膜厚度无法保证,造成刚度损失而模态频率降低,严重时会发生运动卡死而损坏气浮轴承,磨花气浮面等严重后果,因此亟需设计一款新型的超精密二自由度气浮运动平台来减小气浮导轨对定位精度的影响。
目前,本领域相关技术人员已经做了一些研究,如专利CN1701925A公开了一种带双边直线电机同步驱动的H型气浮工作台,能实现高速和高精度定位。但是该专利公开的气浮导轨采用封闭式的高刚性结构,对加工和装配的要求较高;采用双边导轨导向,气浮导轨的气膜厚度不能保证恒定,长时间运动易发生气浮面磨坏甚至卡死等严重后果。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种二自由度气浮运动平台,其基于现有气浮导轨的工作特点,研究及设计了一种二自由度气浮运动平台。所述二自由度气浮运动平台的所述第一X向水平气浮块设置在所述第一X向滑块朝向所述第一X向大理石导轨的侧面上,其用于自动调节所述第一X向滑块与所述第一X向大理石导轨之间的气膜厚度,以保持所述气膜厚度不变,不易发生磨损气浮面或者卡死等现象,提高了精度。
为实现上述目的,本发明提供了一种二自由度气浮运动平台,其包括大理石底座、第一X向运动组件、第二X向运动组件及Y向运动组件,其特征在于:
所述第一X向运动组件及所述第二X向运动组件分别设置在所述大理石底座相背的两端,所述Y向运动组件的两端分别连接于所述第一X向运动组件及所述第二X向运动组件,所述第一X向运动组件、所述第二X向运动组件及所述Y向运动组件构成了H型结构;所述第一X向运动组件及所述第二X向运动组件通过带动所述Y向运动组件运动来带动工作台沿X方向运动,所述Y向运动组件用于带动所述工作台沿Y向运动,从而实现二自由度运动平台带动工作台沿X轴与Y轴两个方向水平移动;
所述第一X向运动组件包括设置在所述大理石底座上的第一X向大理石导轨、套在所述第一X向大理石导轨上的第一X向滑块及第一X向水平气浮块,所述第一X向水平气浮块设置在所述第一X向滑块朝向所述第一X向大理石导轨的侧面上,其用于自动调节所述第一X向滑块与所述第一X向大理石导轨之间的气膜厚度,以保持气膜厚度不变。
进一步地,所述第一X向滑块连接于所述Y向运动组件;通气时,所述第一X向水平气浮块通过自动调节所述第一X向滑块与所述第一X向大理石导轨之间的气膜间隙,以保持所述气膜厚度不变。
进一步地,所述第一X向运动组件包括X向直线电机支撑件、X向直线电机定子、X向直线电机动子、X向直线电机动子连接板、第一X向垂向气浮板及X水平向气浮块连接板,所述第一X向大理石导轨及所述X向直线电机支撑件间隔固定在所述大理石底座上;所述X向直线电机定子设置在所述X向直线电机支撑件上,其与所述X向直线电机动子活动连接;所述X向直线电机动子与所述X向直线电机动子连接板相连接;所述X向直线电机动子连接板连接于所述第一X向垂向气浮板的一端,所述X水平向气浮块连接板连接于所述第一X向垂向气浮板的另一端。
进一步地,所述X向直线电机动子、所述X向直线电机动子连接板、所述第一X向垂向气浮板及所述X水平向气浮块连接板构成所述第一X向滑块。
进一步地,所述X向直线电机动子连接板及所述X水平向气浮块连接板分别位于所述第一X向大理石导轨的左右两侧;所述第一X向垂向气浮板水平设置,且其位于所述第一X向大理石导轨的上方。
进一步地,所述第一X向水平气浮块设置在所述X水平向气浮块连接板朝向所述第一X向大理石导轨的表面上。
进一步地,所述第一X向运动组件还包括两个限位缓冲块,两个所述限位缓冲块分别设置在所述第一X向大理石导轨相背的两端,以用于对所述第一X向滑块的移动进行机械限位及缓冲。
进一步地,所述第一X向运动组件还包括X向光栅尺读数头及X向光栅尺,所述X向光栅尺读数头设置在所述X水平向气浮块连接板的下部,其与所述X向光栅尺相对设置;所述X向光栅尺设置在所述大理石底座上,其邻近所述第一X向大理石导轨设置。
进一步地,所述第一X向运动组件的结构与所述第二X向运动组件的结构相同。
进一步地,所述Y向运动组件包括Y向导轨、回形结构状的Y向滑块、分别连接于所述Y向滑块的Y向直线电机及Y向光栅尺读数头、设置在所述Y向导轨上的Y向光栅尺、以及多个设置在所述Y向滑块上的水平气浮块,所述Y向导轨套设在所述Y向滑块内,所述Y向直线电机及所述Y向光栅尺读数头位于所述Y向导轨与所述Y向滑块之间,多个所述水平气浮块分别位于所述Y向导轨的相背的两侧。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的二自由度气浮运动平台主要具有以下有益效果:
1.所述第一X向水平气浮块设置在所述第一X向滑块朝向所述第一X向大理石导轨的侧面上,其用于自动调节所述第一X向滑块与所述第一X向大理石导轨之间的气膜厚度,以保持所述气膜厚度不变,不易发生磨损气浮面或者卡死等现象,提高了精度;垂向气浮板采用真空吸附预加载的方法,提高了运动台整体的刚度和稳定性。
2.滑块套设在大理石导轨上,且滑块与大理石导轨隔离开,大理石导轨为滑块的移动提供导向,大大减小了运动部件与导轨之间的摩擦力,提高了工作效率,使得运动平台能够实现高速度运动;
3.采用直线电机驱动,无中间传送机构,使得运动平台能够实现高速度及高精度运动;
4.所述二自由度气浮运动平台结构简单,灵活性较高,易于实施。
附图说明
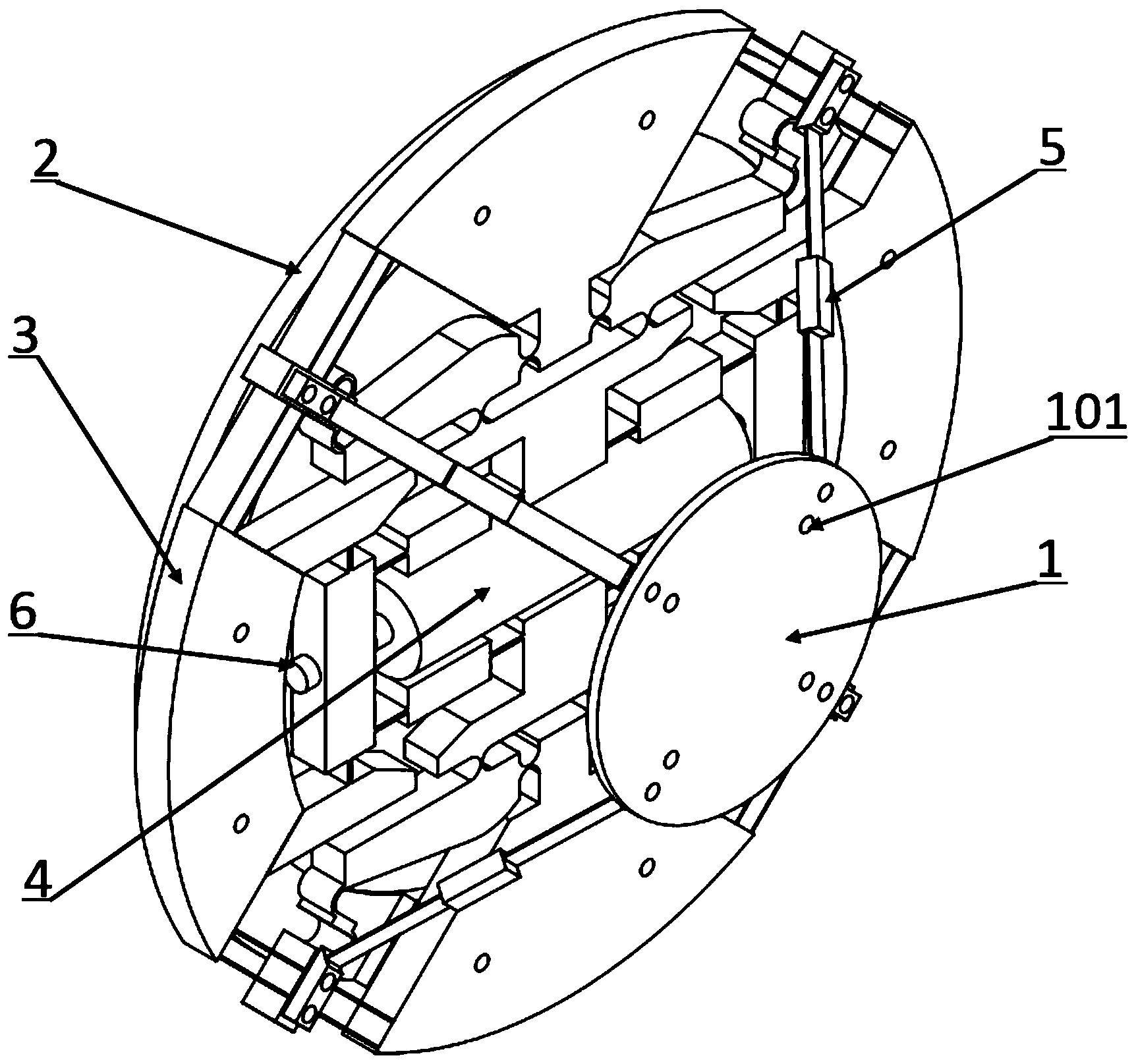
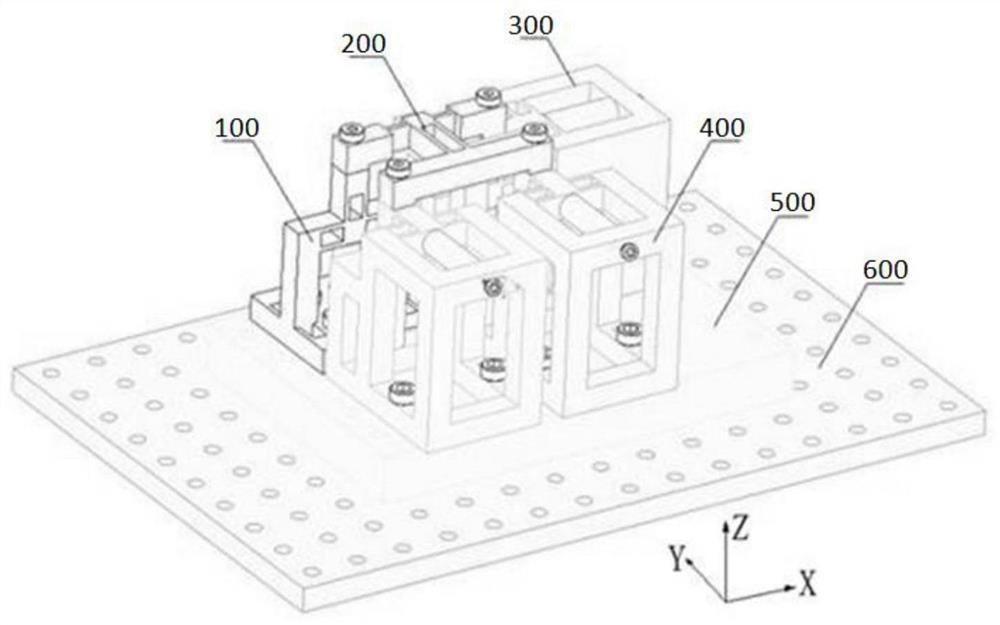
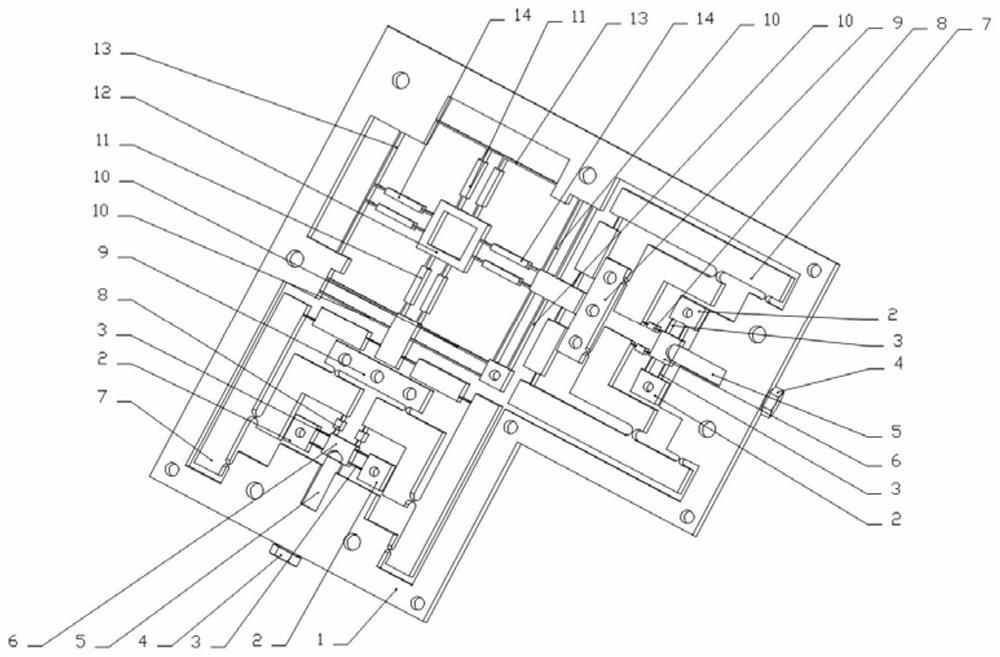
图1是本发明较佳实施方式提供的二自由度气浮运动平台的示意图。
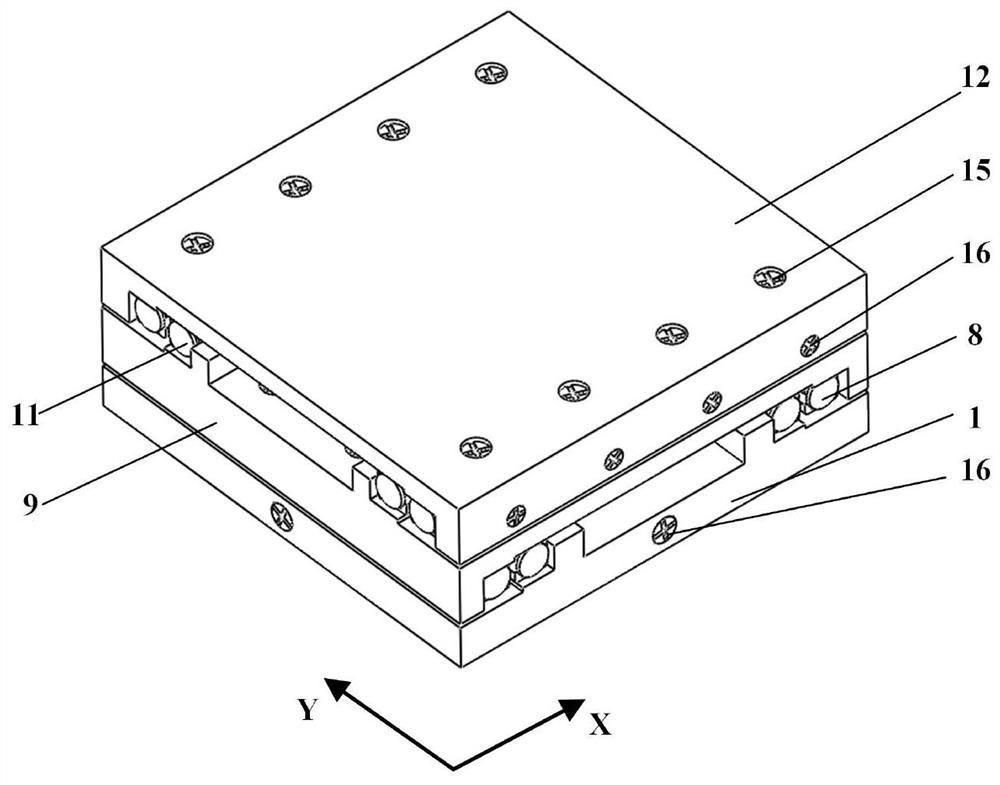
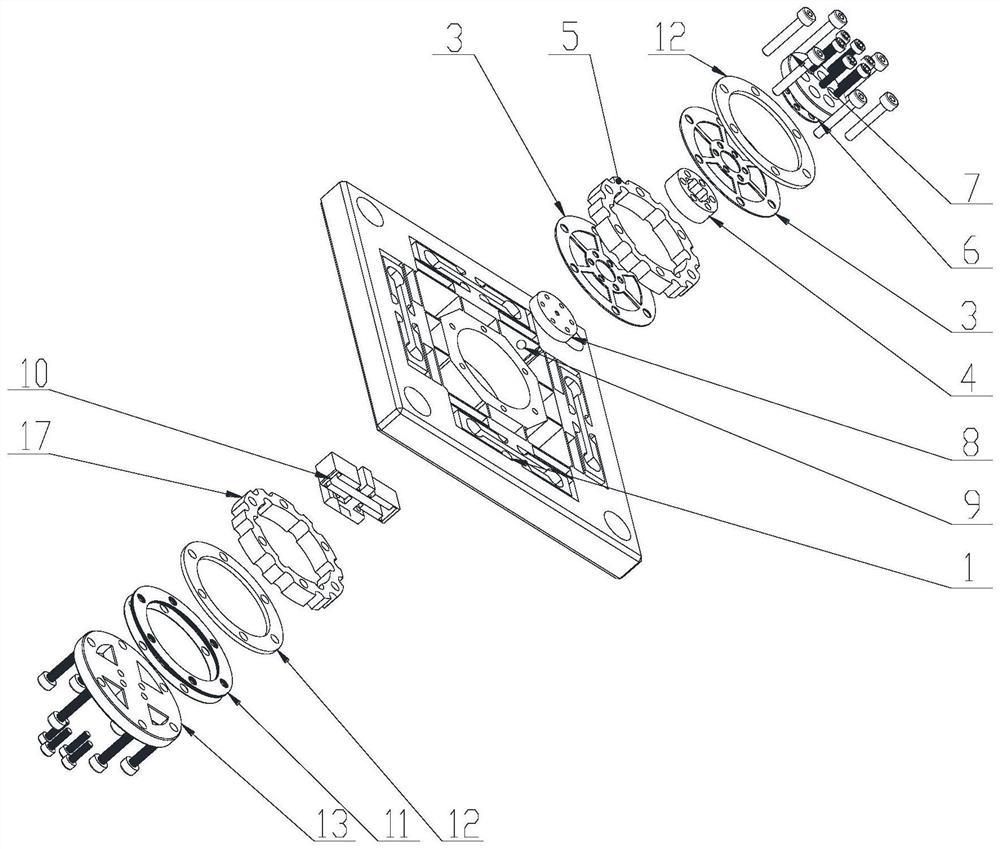
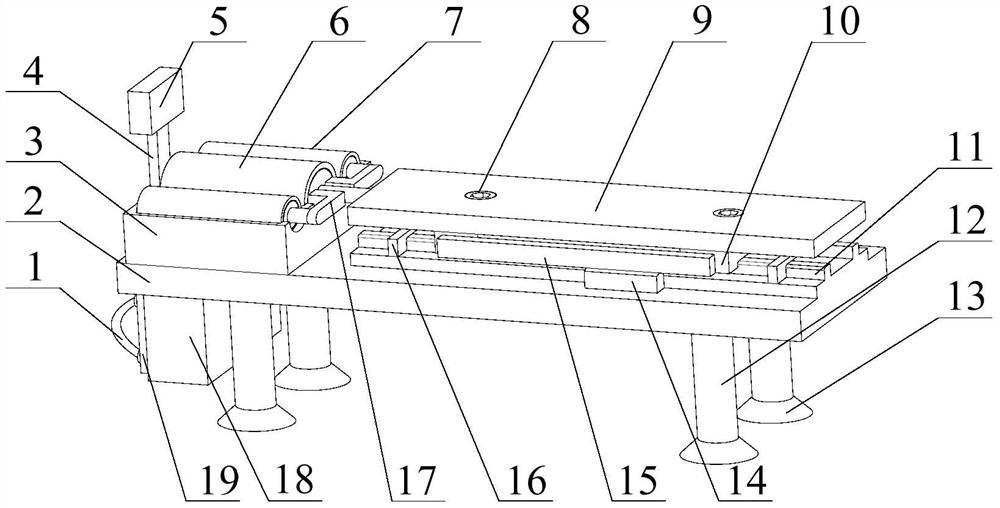
图2是图1中的二自由度气浮运动平台沿另一个角度的示意图;
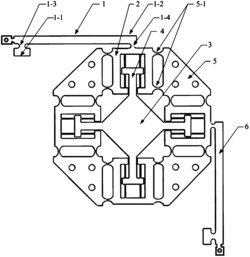
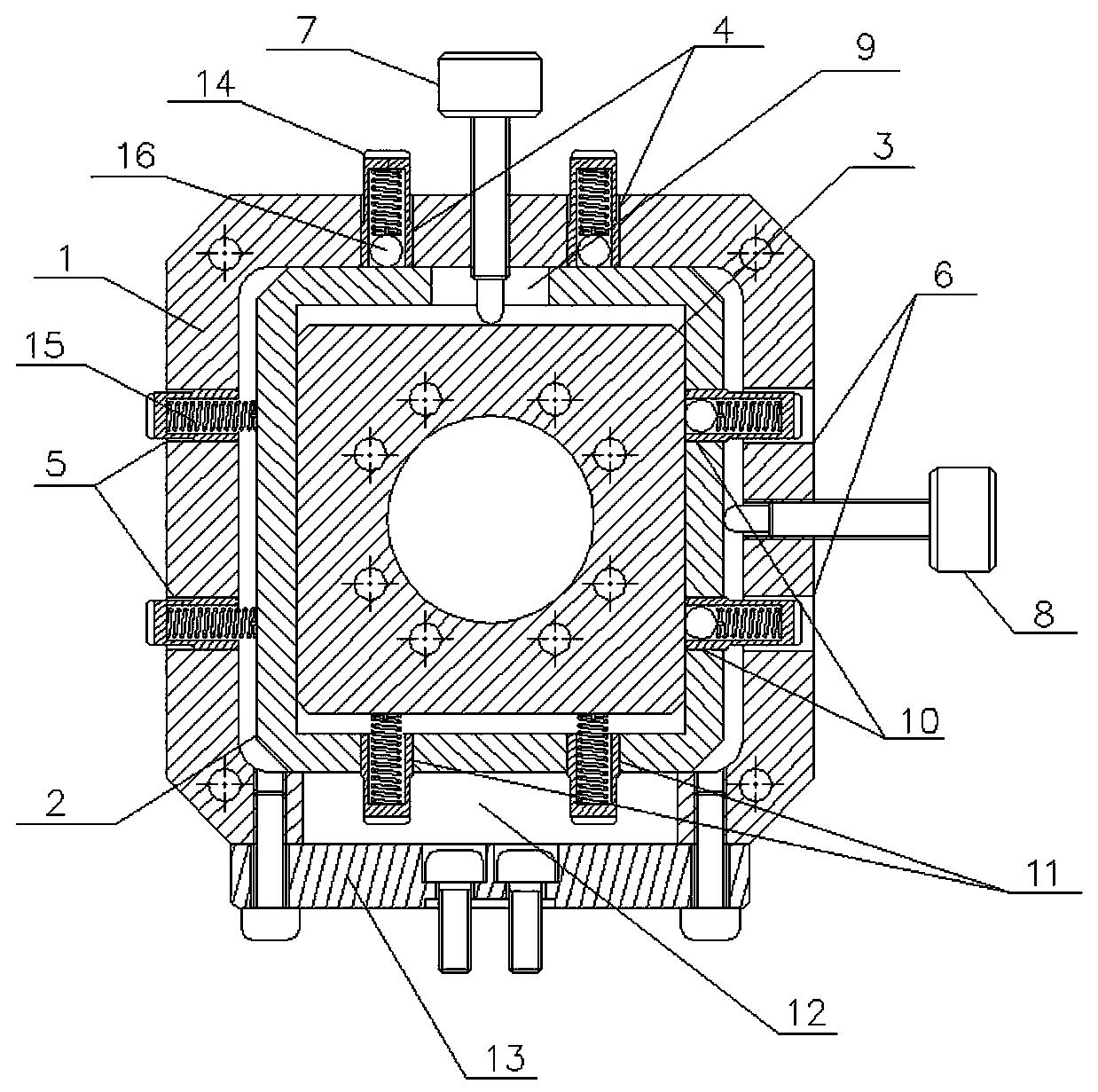
图3是图1中的二自由度气浮运动平台的Y向运动组件的剖视图;
图4是图1中的二自由度气浮运动平台的气浮导轨的原理示意图;
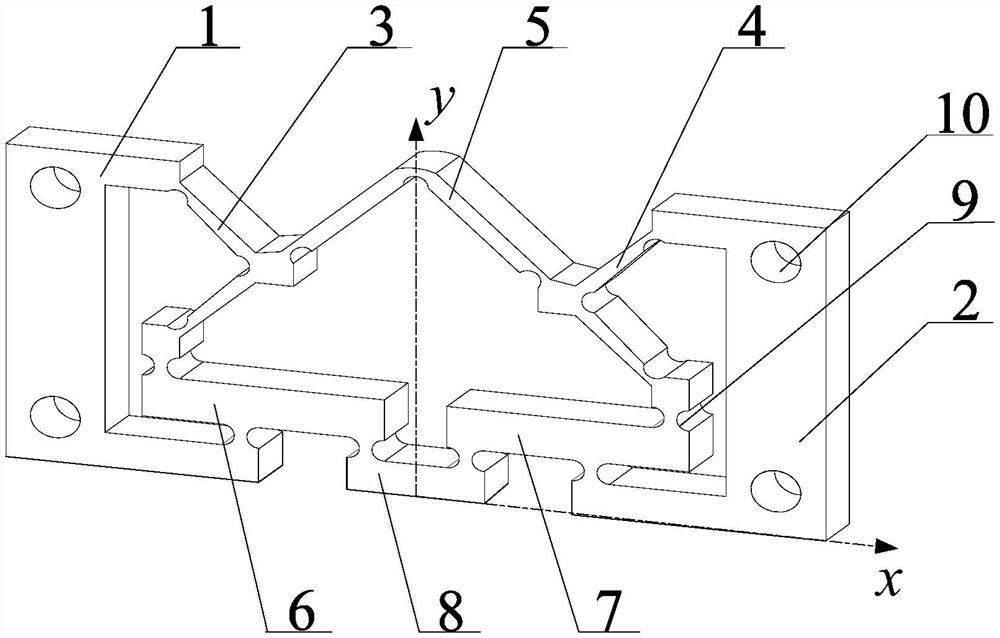
图5是图1中的二自由度气浮运动平台的X向运动部件的受力示意图。
在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:1-大理石底座,2-第一X向运动组件,21-第一X向大理石导轨,22-X向直线电机支撑件,23-X向直线电机定子,24-X向直线电机动子,25-X向直线电机动子连接板,26-第一X向垂向气浮板,27-X水平向气浮块连接板,28-第一X向水平气浮块,29-限位缓冲块,210-X向光栅尺读数头,211-X向光栅尺,3-第二X向运动组件,31-第二X向大理石导轨,36-第二X向垂向气浮板,38-第二X向水平气浮块,4-Y向运动组件,41-Y向导轨,42-Y向直线电机定子,43-Y向直线电机动子,44-Y向直线电机连接板,45-工作台,46a-第一Y水平向气浮安装板,46b-第二Y水平向气浮安装板,47-Y垂向气浮板,48a-第一水平向气浮块,48b-第二水平向气浮块,48c-第三水平向气浮块,48d-第四水平向气浮块,49-真空吸附台面,410-Y向光栅尺读数头连接板,411-Y向光栅尺读数头,412-Y向光栅尺。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
请参阅图1至图4,本发明较佳实施方式提供的二自由度气浮运动平台,所述二自由度气浮运动平台包括大理石底座1、设置在所述大理石底座1上的第一X向运动组件2、第二X向运动组件3及Y向运动组件4,所述大理石底座1基本呈矩形,所述第一X向运动组件2及所述第二X向运动组件3分别设置在所述大理石底座1相背的两端,所述Y向运动组件4设置在所述第一X向运动组件2及所述第二X向运动组件3之间,且其两端分别连接于所述第一X向运动组件2及所述第二X向运动组件3而组成了H型结构。所述二自由度气浮运动平台能够带动工件沿X轴与Y轴两个方向水平移动。
所述第一X向运动组件2与所述第二X向运动组件3的结构相同,两者相对设置。所述第一X向运动组件2包括第一X向大理石导轨21、X向直线电机支撑件22、X向直线电机定子23、X向直线电机动子24、X向直线电机动子连接板25、第一X向垂向气浮板26、X水平向气浮块连接板27、第一X向水平气浮块28、限位缓冲块29、X向光栅尺读数头210及X向光栅尺211。
所述第一X向大理石导轨21及所述X向直线电机支撑件22间隔固定在所述大理石底座1上,所述X向直线电机支撑件22设置在所述第一X向大理石导轨21远离所述Y向运动组件4的一侧。所述X向直线电机定子23设置在所述X向直线电机支撑件22上,其与所述X向直线电机动子24活动连接。所述X向直线电机动子24与所述X向直线电机动子连接板25相连接。所述X向直线电机动子连接板25连接于所述第一X向垂向气浮板26的一端,所述X水平向气浮块连接板27连接于所述第一X向垂向气浮板26的另一端。所述X向直线电机动子24、所述X向直线电机动子连接板25、所述第一X向垂向气浮板26及所述X水平向气浮块连接板27构成第一X向滑块,所述Y向运动组件4的一端连接于所述第一X向滑块,所述第一X向大理石导轨21为所述第一X向滑块的移动提供导向。所述X向直线电机动子24在对应的X向直线电机的驱动下带动所述第一X向滑块沿X轴方向移动,所述第一X向滑块带动所述Y向运动组件4移动。
所述X向直线电机动子连接板25及所述X水平向气浮块连接板27分别位于所述第一X向大理石导轨21的左右两侧。所述第一X向垂向气浮板26水平设置,且其位于所述第一X向大理石导轨21的上方。所述第一X向垂向气浮板26的气浮作用面为所述第一X向大理石导轨21的远离所述大理石底座1的表面。本实施方式中,所述第一X向垂向气浮板26开设有节流孔及内凹的真空腔,以采用真空吸附提供预加载力,提高了所述第一X向垂向气浮板26所形成的气浮导轨的刚度。
所述第一X向水平气浮块28设置在所述X水平向气浮块连接板27朝向所述第一X向大理石导轨21的表面上,通气时,使得气浮力作用在所述第一X向大理石导轨21的侧面上,所述第一X向滑块在水平方向与所述第一X向大理石导轨21隔离开,以形成封闭型气浮导轨。本实施方式中,所述第一X向水平气浮块28的数量为两个,两个所述第一X向水平气浮块28间隔设置;可以理解,在其他实施方式中,所述第一X向水平气浮块28的数量可以根据实际需要增加或者减少。
所述限位缓冲块29的数量为两个,两个所述限位缓冲块29分别设置在所述第一X向大理石导轨21相背的两端,所述限位缓冲块29用于为所述第一X向滑块在X方向的移动进行机械限位及缓冲。
所述X向光栅尺读数头210设置在所述X水平向气浮块连接板27的下部,其与所述X向光栅尺211相对设置。所述X向光栅尺211设置在所述大理石底座1上,其邻近所述第一X向大理石导轨21设置。所述X向光栅尺读数头210与所述X向光栅尺211作为所述第一X向运动组件2的位置测量元件,两者共同用于提供工作台在X方向的位置反馈。
所述第二X向运动组件3的第二X向大理石导轨31与所述第一X向大理石导轨21平行设置。所述第一X向运动组件2及所述第二X向运动组件3共同用于驱动所述工作台在X方向的运动。
所述Y向运动组件4包括Y向导轨41、Y向直线电机定子42、Y向直线电机动子43、Y向直线电机连接板44、工作台45、第一Y水平向气浮安装板46a、第二Y水平向气浮安装板46b、Y垂向气浮板47、第一水平向气浮块48a、第二水平向气浮块48b、第三水平向气浮块48c、第四水平向气浮块48d、真空吸附台面49、Y向光栅尺读数头连接板410、Y向光栅尺读数头411及Y向光栅尺412。
所述Y向导轨41的两端分别与所述第一X向运动组件2的第一X向滑块及所述第二X向运动组件3的第二X向滑块相连接,且所述Y向导轨41位于所述大理石底座1的上方。所述Y向直线电机定子42设置在所述Y向导轨41上,其与所述Y向直线电机动子43活动连接。所述Y向直线电机动子43与所述Y向直线电机连接板44相连接,所述Y向直线电机连接板44与所述工作台45相连接,所述工作台45位于所述Y向直线电机连接板44的上方。所述第一Y水平向气浮安装板46a与所述第二Y水平向气浮安装板46b分别垂直连接于所述工作台45相背的两端,所述Y垂向气浮板47连接所述第一Y水平向气浮安装板46a与所述第二Y水平向气浮安装板46b,所述工作台45、所述第一Y水平向气浮安装板46a、所述第二Y水平向气浮安装板46b及所述Y垂向气浮板47构成回形结构状的Y向滑块,所述Y向滑块环抱在所述Y向导轨41上,所述工作台45位于所述Y向导轨41上方,所述第一Y水平向气浮安装板46a及所述第二Y水平向气浮安装板46b分别位于所述Y向导轨41相背的两侧,所述Y垂向气浮板47位于所述Y向导轨41的下方。所述Y垂向气浮板47的气浮力作用在所述大理石底座1朝向所述Y向运动组件4的表面上,以为所述Y向滑块提供竖直方向的气浮力。本实施方式中,所述Y垂向气浮板47上设置有节流孔及向内凹的真空腔,以采用真空吸附提供预加载力,提高了Y竖直方向气浮导轨的刚度。
所述第一水平向气浮块48a及所述第二水平向气浮块48b间隔设置在所述第一Y水平向气浮安装板46a朝向所述Y向导轨41的表面上。所述第三水平向气浮块48c及所述第四水平向气浮块48d间隔设置在所述第二Y水平向气浮安装板46b朝向所述Y向导轨41的表面上。所述第一水平向气浮块48a、所述第二水平向气浮块48b、所述第三水平向气浮块48c及所述第四水平向气浮块48d共同用于为所述Y向滑块提供在水平方向的气浮力。
所述真空吸附台面49设置在所述工作台45上,其采用抽气产生真空负压的方式将工件固定。所述Y向光栅尺412设置在所述Y向导轨41上,所述Y向光栅尺读数头连接板410的一端连接于所述工作台45的下部,另一端连接于所述Y向光栅尺读数头411。所述Y向光栅尺读数头411及所述Y向光栅尺412构成所述Y向运动组件4的位置测量元件,以提供所述工作台45在Y方向的位置反馈。
工作时,所述第一X向运动组件2的第一X向垂向气浮板26及所述第二X向运动组件3的第二X向垂向气浮板36内通入气体,以将所述第一X向滑块及所述第二X向滑块及所述Y向导轨41浮于所述大理石底座1上。所述第一X向水平气浮块28及所述第二运动组件3的第二X向水平气浮块38在运行过程中被通入一定压力的气体,使得所述第一X向水平气浮块28与所述第一X向大理石导轨21之间及所述第二X向水平气浮块38与所述第二X向大理石导轨31之间分别产生气膜,以将所述第一X向滑块及所述第二X向滑块分别与所述第一X向大理石导轨21及所述第二X向大理石导轨31隔开而形成气浮轴承。
本实施方式中,所述第一X向水平气浮块28采用普通的气浮块,所述第二X向水平气浮块38为具有自动调节气膜间隙功能的气浮块;可以理解,在其他实施方式中,所述第一X向水平气浮块28也可以为可自动调节气膜间隙的气浮块。
在X方向上,所有运动组件均不与所述大理石底座1及大理石导轨接触,并且形成有气膜间隙。同理,所述Y垂向气浮板47被通入气体,以将所述Y向运动组件4浮在所述大理石底座1上方,并使所述Y向运动组件4与所述Y向导轨41保持一定间隙。在竖直方向上,所述第一X向滑块、所述第二X向滑块及所述Y向滑块之间不会产生相互影响。
所述第一水平向气浮块48a、所述第二水平向气浮块48b、所述第三水平向气浮块48c及所述第四水平向气浮块48d内通入气体,所述Y向导轨41的两侧与所述Y向滑块之间产生气膜间隙,以将所述Y向导轨41与所述Y向滑块隔开而形成气浮轴承。所述第一X向滑块与所述第二X向滑块分别在对应的X向直线电机的驱动下带动所述工作台45在X方向上运动,所述Y向滑块在Y向直线电机的驱动下带动所述工作台45在Y方向上运动。
在竖直方向上,调节所述第一X向运动组件2的第一X向垂向气浮板26的节流孔及真空腔的位置及所述第二X向运动组件2的第二X向垂向气浮板36的节流孔及真空腔的位置,使得气浮作用力在XY坐标面上通过所述第一X向滑块、所述第二X向滑块及所述Y向导轨41共同的重心;通过调节所述Y向运动组件4的气浮板的节流孔及真空腔的位置,以使气浮作用力在XY坐标平面上通过所述Y向滑块的重心;通过调节所述第一X向运动组件2及所述第二X向运动组件3的气浮块的安装位置,使气浮作用力在XZ坐标平面上通过所述第一X向运动组件2、所述第二X向运动组件3及所述Y向导轨41共同的重心。通过调节所述Y向运动组件4的气浮块的安装位置,使气浮作用力在X坐标上通过所述Y向滑块的重心。调节作用位置与重心重合,可以避免气浮力与重心不重合时带来的弯矩作用产生的气膜厚度变化。
请参阅图5,由于大理石导轨加工和装配产生的误差,对所述第一X向大理石导轨21及所述第二X向大理石导轨31的平面度和平行度均有一定影响。当误差较小时,在运动过程中,各个气浮块与大理石导轨之间的气膜厚度会发生变化;由于气浮块通入的气压恒定,气浮块与大理石导轨之间的气膜刚度也会发生变化,从而导致运动平台不稳定。当误差较大时,在运动过程中会发生卡死和磨坏气浮面等严重后果。本发明采用具有可自动调节气膜间隙功能的气浮块,在运动过程中,气浮块与大理石导轨之间的气膜间隙可以保持恒定,气膜的刚度也保持恒定,提高了运动平台的精度和稳定性。
X向运动部件包括第一X向滑块、第二X向滑块和Y向导轨41。对于X向运动部件,在运动过程中由于X向直线电机的驱动力和Y水平向气浮反作用力的存在,加速或减速时会产生倾覆力矩,进而导致整个X向运动部件在加速或减速过程中发生后仰或前倾。通过计算X向直线电机驱动力和Y水平向气浮作用力的相对位置可消除该倾覆力矩,保证X向运动部件在运动过程中的稳定。如图5所示,X向运动部件的重心为Gx,X向直线电机驱动力为F1,F1作用点到重心的距离为d1,Y水平向气浮块对X向运动部件的气浮力为F2,其作用点到重心的距离为d2。设X向滑块质量为mx,Y向滑块质量为my,加速度为a,当X向运动部件朝X正方向加速运动时,在X方向上,X运动部件所受的力为F1、F2,其中F1=(mx+my)a,F2=mya。对X向运动部件重心有如下平衡方程
F1-F2=mxa(1)
F1·d1-F2·d2+Mx=0(2)
其中Mx为X运动部件的倾覆力矩;当Mx=0时,即X运动部件的倾覆力矩为零,有
F1·d1-F2·d2=0(3)
代入F1=(mx+my)a、F2=mya得
当d1、d1满足以上关系时,X向运动部件在加速或减速过程中可避免倾覆力矩的产生,X竖直向气膜厚度可保持均匀。
本发明提供的二自由度气浮运动平台,其所述第一X向水平气浮块设置在所述第一X向滑块朝向所述第一X向大理石导轨的侧面上,其用于自动调节所述第一X向滑块与所述第一X向大理石导轨之间的气膜厚度,以保持所述气膜厚度不变,不易发生磨损气浮面或者卡死等现象,提高了精度。此外,滑块套设在大理石导轨上,且滑块与大理石导轨隔离开,大理石导轨为滑块的移动提供导向,大大减小了运动部件与导轨之间的摩擦力,提高了工作效率,使得运动平台能够实现高速度运动。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
一种二自由度气浮运动平台专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0