







专利摘要
本实用新型公开了一种重力张紧装置,其主要包括:机架,其用于支撑;变力臂装置,其包括支撑件、阶梯轮,支撑件固设于机架上,阶梯轮可转动的设于支撑件上,阶梯导轮包括第一绕线轮、第二绕线轮和转动轴,第一绕线轮的半径是第二绕线轮半径的1.5~10倍;柔性传力件,其用于传递拉力;以及重力件,利用自身重力用于牵引所述阶梯轮转动。本实用新型主要用于带锯机上,为可移动的导轮提供张紧力。本重力张紧装置中设有不同力臂的机构,以较小的重力为输入,通过上述机构转化成较大的张紧力,该张紧力稳定性高,本装置中设有检测张紧力大小的部件,根据需要可以准确调节张紧力大小,重力件中单个砝码的重量较轻,操作工人可以轻易完成操作。
权利要求
1.一种重力张紧装置,其特征在于,包括:
机架,其用于支撑;
变力臂装置,所述变力臂装置包括支撑件、阶梯轮,所述支撑件固设于机架上,所述阶梯轮可转动的设于支撑件上,所述阶梯轮包括第一绕线轮、第二绕线轮和转动轴,所述第一绕线轮的半径是第二绕线轮半径的1.5~10倍;
柔性传力件,其用于传递拉力,所述柔性传力件包括第一拉线和第二拉线,所述第一拉线的一端固设于所述第一绕线轮上,所述第一拉线的另一端挂设有重力件,所述第二拉线的一端固设于所述第二绕线轮上,所述第二拉线的另一端设于所述机架上的张紧滑块上;以及
重力件,利用自身重力用于牵引所述阶梯轮转动,所述重力件挂设于第一拉线上。
2.根据权利要求1所述的一种重力张紧装置,其特征在于,所述机架上设有可转动的导向轮,所述导向轮用于改变所述第二拉线的拉力方向。
3.根据权利要求1所述的一种重力张紧装置,其特征在于,所述柔性传力件为钢丝、塑料线或者布料带。
4.根据权利要求1所述的一种重力张紧装置,其特征在于,所述第一绕线轮和所述第二绕线轮可拆卸的套设于所述转动轴上,所述第一绕线轮、所述第二绕线轮和所述转动轴相互同心设置。
5.根据权利要求4所述的一种重力张紧装置,其特征在于,所述第一绕线轮和所述第二绕线轮上均开设有弯曲通孔。
6.根据权利要求1所述的一种重力张紧装置,其特征在于,所述第二拉线上设有拉力传感器。
7.根据权利要求6所述的一种重力张紧装置,其特征在于,所述拉力传感器为“S”型结构的电阻应变式传感器。
说明书
技术领域
本实用新型涉及一种带锯机,特别涉及一种带锯机上用的张紧装置。
背景技术
国内外,木工带锯机研究和制作已经发展几十年,成果颇丰。目前,基于木工带锯机为原型,在许多其他领域开发了类似的带锯机。但是共同点是研究朝着精密型和紧凑型方向发展,首先加工的精度要求越来越高,这对设备提出了更高的要求,稳定性要好,切割效率要高;然后整个设备占地空间要小,结构要简单。对切割精度影响最大的就是带轮的转动稳定性,这需要切割带上的张紧力要合适,张紧力恒定和稳定。使用时,带锯上需要的张紧力较大,至少需要几十公斤甚至几百公斤的拉力。在现有文献中,公开的张紧机构主要包括液压张紧装置、螺杆张紧装置或者气压张紧装置,这些装置虽然能提供较大的张紧力,但是都有各自的缺陷。液压装置会存在液压油泄露的问题,使得作业的环境较差,维修繁琐;气压存在泄压的问题,而且会产生噪音;这两种装置会增加附加设备,导致成本提高和占地空间扩大,维修和操作繁琐。而螺杆张紧装置的螺纹连接存在有间隙,压力无法稳定,张紧力难以准确掌控,影响切割精度和使用寿命。需要研发一种张紧装置,既能提供恒力张紧,张紧力稳定性高,装置结构简单,空间尺寸小。
公开于该背景技术部分的信息仅仅旨在增加对本实用新型的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
实用新型内容
本实用新型的目的在于提供一种重力张紧装置,可以提供稳定的张紧力,结构简单,操作方便,制造成本低。
为实现上述目的,本实用新型提供了一种重力张紧装置,其包括:
机架,其用于支撑;
变力臂装置,所述变力臂装置包括支撑件、阶梯轮,所述支撑件固设于机架上,所述阶梯轮可转动的设于支撑件上,所述阶梯导轮包括第一绕线轮、第二绕线轮和转动轴,所述第一绕线轮的半径是第二绕线轮半径的1.5~10倍;
柔性传力件,其用于传递拉力,所述柔性传力件包括第一拉线和第二拉线,所述第一拉线的一端固设于所述第一绕线轮上,所述第一拉线的另一端挂设有重力件,所述第二拉线的一端固设于所述第二绕线轮上,所述第二拉线的另一端设于所述机架上的张紧滑块上;以及
重力件,利用自身重力用于牵引所述阶梯轮转动,所述重力件挂设于第一拉线上。
优选的,上述技术方案中,所述机架上设有可转动的导向轮,所述导向轮用于改变所述第二拉线的拉力方向。
优选的,上述技术方案中,所述柔性传力件为钢丝、塑料线或者布料带。
优选的,上述技术方案中,所述第一绕线轮和所述第二绕线轮可拆卸的套设于所述转动轴上,所述第一绕线轮、所述第二绕线轮和所述转动轴相互同心设置。
优选的,上述技术方案中,所述第一绕线轮和所述第二绕线轮上均开设有弯曲通孔。
优选的,上述技术方案中,所述第二拉线上设有拉力传感器,所述拉力传感器用于检测拉力大小,所述拉力传感器的信号输出线连接在所述信号显示器的输入端口上。
优选的,上述技术方案中,所述拉力传感器为“S”型结构的电阻应变式传感器。
本实用新型具有如下有益效果:
第一,利用力矩平衡原理,本重力张紧装置中设有不同力臂的机构,以较小的重力为输入,通过上述机构转化成较大的张紧力,用于张紧带锯,带锯上的张紧力由重力决定,可以设为一个恒力张紧,且稳定性高。
第二,拉线上张紧力的大小可被监测,根据需要可以准确调节。
第三,单个砝码的重量较轻,操作工人可以轻易完成操作。
附图说明
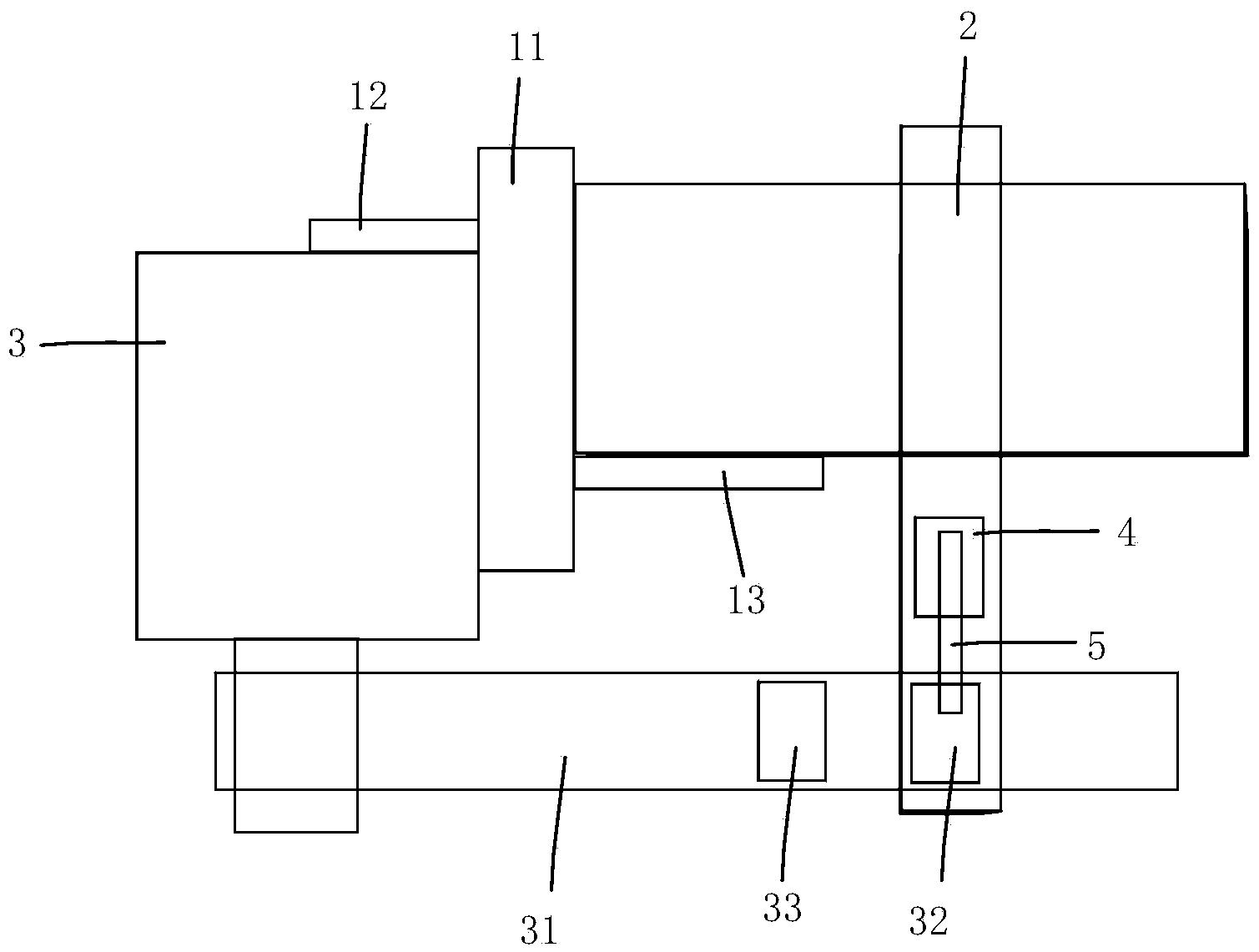
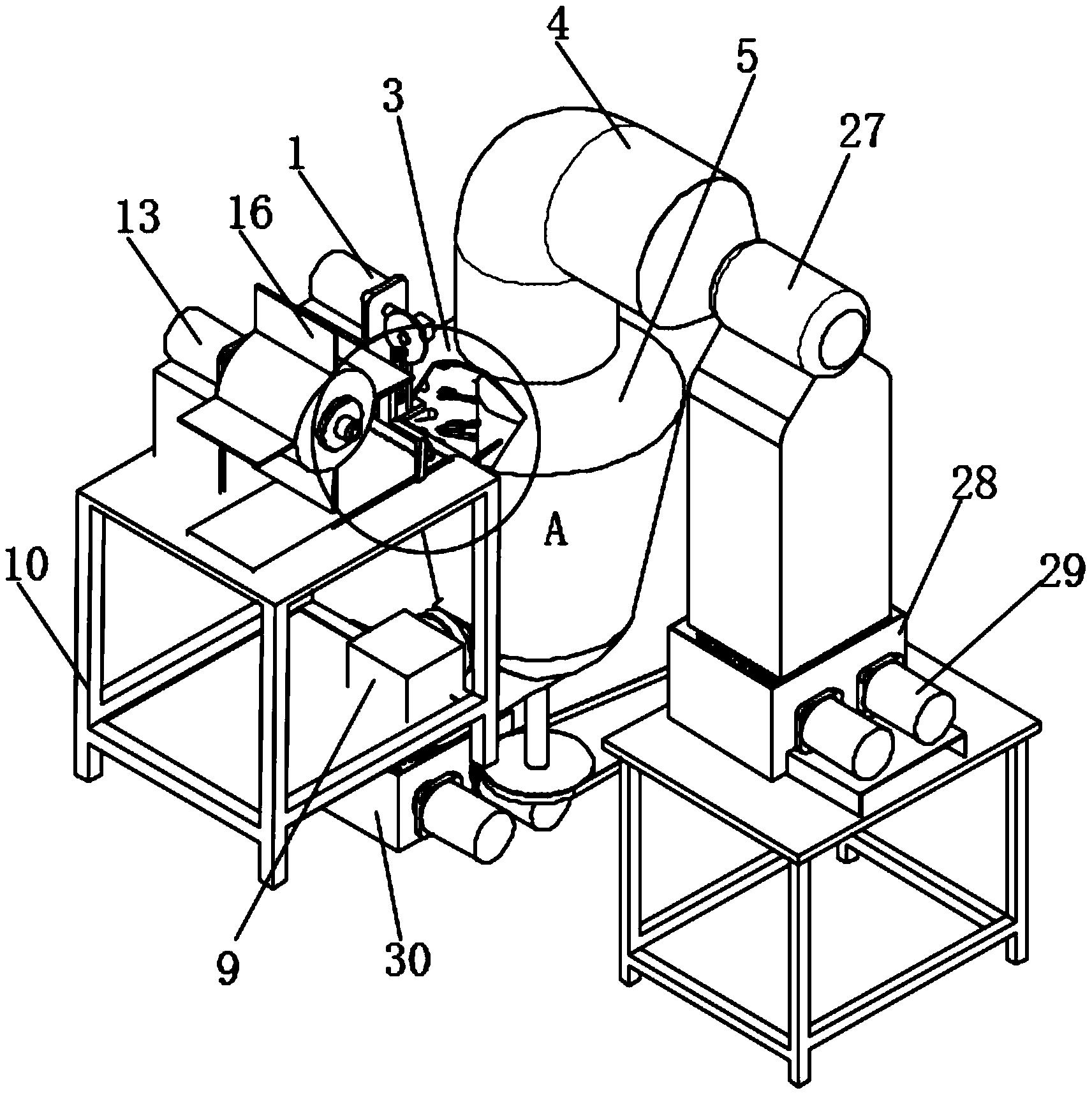
图1是根据本实用新型的重力张紧装置的后视图。
图2是根据本实用新型的重力张紧装置的后视图。
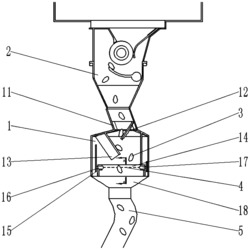
图3是根据本实用新型的重力张紧装置中阶梯轮的主视图。
图4是根据本实用新型的重力张紧装置中阶梯轮的爆炸示意图。
主要附图标记说明:
1-机架,2-张紧滑块,3-导轨,4-拉力传感器,5-导向轮,6-支撑件,7-阶梯轮,71-第一绕线轮,711-第一卡线孔,72-第二绕线轮,721-第二卡线孔,73-转动轴,74卡扣,81-第一拉线,82-第二拉线,9-重力件, 10-承接台,11-感应开关,12-信号转换器,R1-大轮半径,R2-小轮半径。
具体实施方式
下面结合附图,对本实用新型的具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
如图1至图4所示,显示了根据本实用新型优选实施方式的重力张紧装置的结构示意图,该重力张紧装置主要包括机架1、支撑件6、阶梯轮7、第一拉线81、第二拉线82和重力件9等,支撑件6固设于机架1上,阶梯轮7可转动的设于支撑件6上,第一拉线81和第二拉线82分别设于阶梯轮7上,重力件9挂设于第一拉线81上,具体实施方式如下:
机架1上设有导轨3,所述导轨3平行设置,导轨3上设有配套的导轨滑块,张紧滑块2固定连接在导轨3的导轨滑块上,张紧滑块2沿着导轨3可作上下移动。
机架1上另设有变力臂装置,变力臂装置包括支撑件6和阶梯轮7,支撑件6利用螺栓固定在机架1上,阶梯轮7可转动的设置在支撑件6的轴承上,阶梯轮7包括第一绕线轮71、第二绕线轮72、转动轴73和卡扣74,第一绕线轮71和第二绕线轮72套插在转动轴73上,利用键连接限制圆周方向的相对转动,所述第一绕线轮71的半径R1是第二绕线轮72半径R2的1.5~10倍。
在变力臂装置上设有柔性传力件,柔性传力件包括第一拉线81和第二拉线82,第二拉线82的一端穿过第二绕线轮72上的第一卡线孔721,从圆周面进入,从端面穿出,留出一定长度的线头用于卡在卡扣74上,第二拉线82的另一端连接在张紧滑块2的顶部。第一拉线81的一端穿过第一绕线轮71上的第一卡线孔711,从圆周面进入,从端面穿出,留出一定长度的线头用于卡在卡扣74上,第一拉线81的另一端用于挂连重力件。
重力件9为多个单独的砝码,相互之间可以通过挂钩连接起来,砝码通过挂钩挂载在第一拉线81上,由于重力作用,当重力足够大时,牵引第一拉线81向下运动,以使阶梯轮7转动,第二拉线82作收线运动,带动机架1上的张紧滑块2向上移动,达到张紧带锯的效果。重力件9正下方设有承接台10,承接台10的顶面设有橡胶层,带锯绷断时,砝码会突然下落,承接台10可以起缓冲作用。
在本实用新型的一个优选具体实施例中,机架1上设有导向轮5,导向轮设于第二拉线82需要改变方向的中间拐点处,可以使第二拉线82的竖直方向过度到水平方向。导向轮5包括支撑轴和导轮,所述支撑轴固设于机架1上,所述导轮可转动的设于所述支撑轴上,导轮外圆开设有“U”型槽,防止第二拉线82脱离导向轮5。
在本实用新型的一个优选具体实施例中,所述第一拉线81和所述第二拉线82可以采用细钢丝、高强度的塑料线或者布带,已公开销售的高强度塑料线抗拉强度可达600MPa,普通铁线为150MPa,电镀钢丝为400-480MPa,塑料线具有更好的柔韧性,所以塑料线更适合传递拉力。
在本实用新型的一个优选具体实施例中,所述第一绕线轮71嵌套在所述转轴73上,且相互同心设置,所述第二绕线轮72嵌套在所述转轴73上,且相互同心设置,在转动轴73的两端开设螺纹,利用螺母锁紧,限制第一绕线轮71和第二绕线轮72发生轴向移动。
在本实用新型的一个优选具体实施例中,在第二拉线82与张紧滑块2之间设有拉力传感器4,拉力传感器4的输出信号线连接在信号转换器12上的输入端口,信号转换器12是与拉力传感器4匹配的数显器,通电之后可以直接显示拉力传感器4上的拉力或者压力,拉力为正数,压力为负数。
在本实用新型的一个优选具体实施例中,拉力传感器4为“S”型称重用的拉压力传感器,该型号的拉力传感器4需要进行校核,用标准的已知重量的物体测出线性相关参数,再设置好正确的参数即可准确测量。
在本实用新型的一个优选具体实施例中,在重力件9的斜下方设有感应开关11,感应开关11的输出信号线连接在信号转换器12的输入端口上,当重力件9下落时经过感应开关11的正前方时,感应开关11会被触发生成一个信号反馈给信号转换器12,可以判断带锯断了,从而控制带锯机停止运转,或者发出其他的控制指令。
在本实用新型的一个优选具体实施例中,选用一个具体实施例分析,设大轮半径R1是小轮半径R2的10倍,重力件9的重力作为输入力,重力就会被放大10倍,以作为第二拉线82中的张紧力。因为在工作时,张紧滑块2处于张紧状态,根据力矩平衡原理,第一绕线轮71的半径即大轮半径R1为力臂L1,第二绕线轮72的半径即小轮半径R2为力臂L2,设砝码9的重力为M1,根据力矩平衡公司即可得出,第二拉线82中的拉力大小就为M1的10倍。相当于将重力件9的重力放大10倍,提供为张紧力。实际操作中,工人只需要将单个的砝码逐渐添加,根据信号转换器12的显示值,达到所需的张紧力即可。单个砝码重量可以设置在1Kg-5Kg之间,对于普通人很容易即可完成操作。
前述对本实用新型的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本实用新型限定为所公开的精确形式,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本实用新型的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本实用新型的各种不同的示例性实施方案以及各种不同的选择和改变。本实用新型的范围意在由权利要求书及其等同形式所限定。
一种重力张紧装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0