










专利摘要
本发明提供的是一种用于提高船舶并靠补给稳定性的机械吸附装置,该机械吸附装置主要由真空吸盘(1)、液压缓冲机构(2)、机械臂(3)三部分组成;该机械吸附装置工作时,其为补给工作中的两船提供约束力、缓冲力与推力,使两船并靠补给过程能顺利完成。本发明由于采用双面吸盘吸附固定船体,使补给更具稳定性;由于采用吸盘间液压缓冲装置,可提供船舶并靠的缓冲以及推力,使船舶并靠补给的稳定性、安全性得到提高;采用折叠式机械臂设计,使得装置易于安装和操控,并节省甲板空间。
权利要求
1.用于提高船舶并靠补给稳定性的机械吸附装置,其特征是主要由真空吸盘(1)、液压缓冲机构(2)、机械臂(3)三部分组成;该机械吸附装置工作时,其为补给工作中的两船提供约束力、缓冲力与推力,使两船并靠补给过程能顺利完成;
所述的机械臂(3),为折叠式机械臂,主要由依次相连的转动缓冲部件(8)、机械臂下段(9)、机械臂中段(10)、中段液压驱动轴(11)、臂缸(12)、机械臂上段一节臂(13)、机械臂上段二节臂(14)、底座(15)组成,其中:中段液压驱动轴(11)和臂缸(12)使液压泵提供的动力从机械臂上段传递到机械臂中段;机械臂上段二节臂(14)为可旋转二节臂,其能绕底座(15)旋转;使用时,底座(15)固定在船舶的甲板上。
2.根据权利要求1所述的机械吸附装置,其特征在于所述的真空吸盘(1)有两个,分别位于液压缓冲机构(2)的两端。
3.根据权利要求2所述的机械吸附装置,其特征在于所述的两个真空吸盘(1),均采用多唇边式结构(19),工作时唇边形成多层密封,使适应性与吸附力更好,其唇边主要由聚氨酯、丁腈橡胶或含乙烯基的聚合物制成;吸盘内带有波纹管,该波纹管是由多层可折叠皱纹片沿折叠伸缩方向连接而成的,主要作用是减少突变载荷对真空吸盘(1)以及舷侧的影响。
4.根据权利要求1所述的机械吸附装置,其特征在于所述的液压缓冲机构(2),设有液压连接杆(6),其杆体两端设有与之连接的用于连接真空吸盘的球型铰接(7),其杆体外部套有多层碟形弹簧(20)和机械臂与液压缓冲机构连接结构(21),其杆体内部装有电机、油泵、储能活塞及储能提升杆,主要提供补给结束后两船远离时的推力,并给予多层碟形弹簧的支撑力,提升弹簧的刚性系数。
5.根据权利要求4所述的机械吸附装置,其特征是在液压连接杆(6)的内部还配有压力传感器,主要用于监测两船之间受力情况,避免突发情况下船体对机械吸附装置的破坏以及机械吸附装置对舷侧外板的破坏。
6.根据权利要求4所述的机械吸附装置,其特征在于所述的机械臂与液压缓冲机构连接结构(21),其位于多层碟形弹簧(20)稍后部位,从外部看其是一圈往外凸起的结构,与机械臂(3)上的臂、杆及转动缓冲部件(8)相配合,对下端的真空吸盘(1)和液压缓冲机构(2)有转动缓冲作用;在机械吸附装置收放时,与机械臂(3)上的臂、杆及转动缓冲部件(8)相配合的连接部位处于刚性锁死状态,工作时释放约束,使真空吸盘(1)和液压缓冲机构(2)对机械臂(3)的造成载荷最小。
7.根据权利要求6所述的机械吸附装置,其特征在于所述的转动缓冲部件(8)为缓冲结构,主要由螺旋式弹簧构成,其下部与液压缓冲机构的机械臂与液压缓冲机构连接结构(21)相连,工作时使液压连接杆(6)能绕机械臂下段(9)在小范围内自由转动,螺旋式弹簧能在其角度达到转动极限时以及突发振动时提供缓冲力,避免机械臂(3)以及液压连接杆(6)受力过大。
8.根据权利要求1所述的机械吸附装置,其特征在于所述的机械吸附装置还装有控制系统,该控制系统主要由传感器、单片机、安全报警器、机构执行部件组成,其中:所述的传感器包括压力传感器器、位移传感器、角度传感器,其采集机械设备的相关信息数据,进而反馈给单片机,单片机将传感器信号转换为电路信号,然后电路信号反馈到操作界面,船舶工作人员进行相对应的操作,从而使船员能实时了解装置情况,能在船员的干预下实行自动对接吸附,其过程实质为输入控制信号,处理控制信号以及输出控制信号;单片机用以实现机械吸附装置的自动控制与主动控制,控制模式采用三模冗余方式实现,按照规定的时序自动完成真空吸盘(1)的对接与分离,并配备必要的故障检测信号和应急处理指令,使大风浪情况下该机械吸附装置不至于破坏船体,工作时则由操作人员根据实际情况进行调控,处理控制信号;执行结构输出控制信号,该执行结构是机械臂与液压缓冲机构中的液压驱动装置与真空吸盘的驱动装置,所述液压驱动装置是液压泵,所述真空吸盘的驱动装置是真空泵。
9.根据权利要求8所述的机械吸附装置,其特征在于所述的压力传感器安装于多层碟形弹簧(20)内,位移传感器安装于船舶舷侧以及机械臂下段(9)内部,角度传感器安装于球型铰接(7)以及机械臂各分段连接处;这三种传感器输入控制信号,该控制信号包括吸盘受力大小、两船舷侧间距、液压弹簧受力情况、机械臂高度及角度、两船间相对加速度、吊杆相对甲板的加速度信号;安全报警器装在船舶的控制室内,当两船之间的力主要是拉力超过临界值时,警报响起,真空吸盘自动脱离吸附状态,这时机械吸附装置只提供推力或支撑力,不再提供吸附力,操作人员则利用控制系统进行后续操作。
说明书
技术领域
本发明是一种用于提高船舶并靠补给稳定性的机械吸附装置。
背景技术
海上补给是远海护航和远洋作战必不可少的后勤保障手段,也是衡量一支海军持续作战能力的重要依据。海上补给利用各种补给设备在海上对舰船实施武器弹药和物资等的补充,以扩大舰船的作战半径,延长舰船在海上的停留时间,减少舰船对基地的直接依赖程度,从而提高远洋舰船的生存能力,增强作战舰艇的战斗力。由于海上补给的重要性,世界各海军强国都非常重视海上补给技术的发展,美国、英国、俄罗斯、法国、口本等国在海上补给技术和装备方面发展较快,技术上处于领先地位。近几年,由于钓鱼岛事件、南海问题等使得我国我对海上问题越来越重视,这必将会使得对海上补给的需求日趋增加,而且要求也越来越高。
目前海上补给方式主要有航行补给(包括航行横向补给和纵向补给)、并靠(靠绑)补给和直升机垂直补给等。并靠补给作为海上补给的主要补给样式之一,具有补给设备简单、补给速度快等特点,并且通信与操作也比航行补给简便;对于补给需求较大的对象,通常采用并靠(靠绑)补给。军用舰船在海上进行集装箱等较重物体及导弹武器等高危物品的补给时,使用较多且较可靠的补给样式是并靠补给。而且采取靠帮补给方式进行3-5个小时的油料、淡水和蔬菜等物资补给,并非单一目的,而是通过多舰旁靠补给的时间同时进行会议、护航任务研讨,并针对舰艇装备长时间使用后采取“交叉检查”,确保装备完好。同时还能通过文化活动来缓解官兵长时间执勤的压力。
但舰船在海上并靠(靠绑)运用起重机进行物资补给时对海况有一定的要求,在补给船和接收船停泊或低速航行时实施,海况一般低于3级。但由于受到风浪流的影响以及两船间的水动力干扰会产生六自由度的摇荡运动,使补给船与接收舰产生相对运动,使下放中的货物与上升的船体发生碰撞,或已放落到甲板上的货物由于船体的下沉出现再次悬空的现象,这将对并靠补给特别是弹药等危险品补给造成严重威胁。现有的波浪补偿式起重机已经能避免由于升沉波浪所带来的影响,但对横向运动影响的控制仍然存在较大的问题。
现有并靠补给过程中采用缆绳固定、气囊缓冲的方式,其存在以下的缺点:安全性差,两船相隔太近,运输弹药等危险物资存在较大隐患;稳定性差,补给船与接收船相对摇荡较大,货物易滑落,特别是横向位移容易导致两船上层建筑相撞;效率低,补给过程繁琐,在进行补给运输之前需要依靠大量人力对两船进行固定。
发明内容
本发明所要解决的问题是:提供一种用于提高船舶并靠补给稳定性的机械吸附装置,以解决上述现有技术存在的安全性、稳定性差和效率低等问题。
本发明解决其技术问题采用以下的技术方案:
本发明提供的用于提高船舶并靠补给稳定性的机械吸附装置,主要由真空吸盘、液压缓冲机构、机械臂三部分组成;该机械吸附装置工作时,其为补给工作中的两船提供约束力、缓冲力与推力,使两船并靠补给过程能顺利完成。
所述的真空吸盘,有两个,分别位于液压缓冲机构的两端。
所述的两个真空吸盘,均采用多唇边式结构,工作时唇边形成多层密封,使适应性与吸附力更好,其唇边主要由聚氨酯、丁腈橡胶或含乙烯基的聚合物制成;吸盘内带有波纹管,该波纹管是由多层可折叠皱纹片沿折叠伸缩方向连接而成的,主要作用是减少突变载荷对真空吸盘以及舷侧的影响。
所述的液压缓冲机构,设有液压连接杆,其杆体两端设有与之连接的用于连接真空吸盘的球型铰接,其杆体外部套有多层碟形弹簧和装有机械臂与液压缓冲机构连接结构,其杆体内部装有电机、油泵、储能活塞及储能提升杆,主要提供补给结束后两船远离时的推力,并给予多层碟形弹簧的支撑力,提升弹簧的刚性系数。
在液压连接杆的内部还配有压力传感器,主要用于监测两船之间受力情况,避免突发情况下船体对机械吸附装置的破坏以及机械吸附装置对舷侧外板的破坏。
所述的机械臂与液压缓冲机构连接结构,其位于多层碟形弹簧稍后部位,从外部看其是一圈往外凸起的结构,与机械臂上的臂、杆及转动缓冲部件相配合,对下端的真空吸盘和液压缓冲机构有转动缓冲作用;在机械吸附装置收放时,该配合的连接部位处于刚性锁死状态,工作时释放约束,使真空吸盘和液压缓冲机构对机械臂的造成载荷最小。
所述的机械臂,为折叠式机械臂,主要由依次相连的转动缓冲部件、机械臂下段、机械臂中段、中段液压驱动轴、臂缸、机械臂上段一节臂、机械臂上段二节臂、底座组成,其中:中段液压驱动轴和臂缸使液压泵提供的动力从上段机械臂传递到中段机械臂;机械臂上段二节臂为可旋转二节臂,其能绕底座旋转;使用时,底座固定在船舶的甲板上。
所述的转动缓冲部件为缓冲结构,主要由螺旋式弹簧构成,其下部与液压缓冲机构的机械臂与液压缓冲机构连接结构相连,工作时使液压连接杆能绕机械臂下段在小范围内自由转动,螺旋式弹簧能在其角度达到转动极限时以及突发振动时提供缓冲力,避免机械臂以及液压连接杆受力过大。
所述的机械吸附装置还装有控制系统,该控制系统主要由传感器、单片机、安全报警器、机构执行部件组成,其中:所述的传感器包括压力传感器器、位移传感器、角度传感器,起采集机械设备的相关信息数据,进而反馈给单片机,单片机将传感器信号转换为电路信号,然后电路信号反馈到操作界面,船舶工作人员进行相对应的操作,从而使船员能实时了解装置情况,能在船员的干预下实行自动对接吸附,其过程实质为输入控制信号,处理控制信号以及输出控制信号;单片机用以实现机械吸附装置的自动控制与主动控制,控制模式采用三模冗余方式实现,按照规定的时序自动完成真空吸盘的对接与分离,并配备必要的故障检测信号和应急处理指令,使大风浪情况下该机械吸附装置不至于破坏船体,工作时则由操作人员根据实际情况进行调控,处理控制信号;执行结构输出控制信号,该执行结构是机械臂与液压缓冲机构中的液压驱动装置(液压泵)与真空吸盘的驱动装置(真空泵)。
所述的压力传感器安装于多层碟簧内,位移传感器安装于船舶舷侧以及机械臂可伸缩段内部,角度传感器安装于球型铰接以及机械臂各分段连接处;这三种传感器输入控制信号,该控制信号包括吸盘受力大小、两船舷侧间距、液压弹簧受力情况、机械臂高度及角度、两船间相对加速度、吊杆相对甲板的加速度信号;安全报警器装在船舶控制室内,当两船之间的力(主要是拉力)超过临界值时,警报响起,真空吸盘自动脱离吸附状态,这时机械吸附装置只提供推力或支撑力,不再提供吸附力,操作人员则利用控制系统进行后续操作。
本发明与现有技术相比具有以下的主要的优点:
1.利用真空吸盘与液压弹簧取代传统的缆绳、气囊,结构更为安全可靠,根据所选用的吸盘估算其能提供的吸力可达几十吨,液压弹簧所能承受的力则更大。
2.折叠式机械臂控制装置的收放,不用船员手动进行繁琐的操作,减少船舶并靠所用时间。
3.可结合现已较成熟的自动控制技术,对单个机械装置进行统一调控,从而大大减少人力的使用。
4.以较低的成本带来较高的补给效率提升,经过网上查询与实地联系商家,我们估算了单套机械吸附系统的价格大致在4-5万元内。
外媒曾评估现在一艘补给舰的造价基本上在20亿元以上,英国、美国等国家关于补给舰的订单每次基本上在10亿美元以上。中国现在只有6艘综合性的补给舰,且都造价高昂。本发明设计的这套机械吸附装置,在扩展成整套并靠系统之后,造价预计也最多不超过百万,以整艘船几百分之一的价格来改造装配或在建新补给舰时直接配备,其对并靠补给所带来的效益将远高于其成本花费。
国内目前有关的并靠补给报道主要集中在亚丁湾护航任务期间。在干货量大、海况好时,更为倾向靠帮补给方式,其可多点进行补给,较横向补给方式,效率有明显的提高。我们所设计的部分对于并靠补给效率的提高,其意义主要在于两点:一是对两船相对稳定性的提高,二是减少大量人力的使用。在长期远洋中,并靠补给一般会进行3-5个小时,由于可以空出更多的船员参与到多点补给中去和稳定性提升引起运输效率的提高,初步估计可使同样物资的运输时间减少10%-20%,同时提高了安全性,减少了人力消耗。
总之,本发明采用双面吸盘吸附固定船体,使补给更具稳定性;吸盘间液压缓冲装置提供缓冲以及推力,使船舶并靠补给的稳定性、安全性得到提高;采用折叠式机械臂设计,使得装置易于安装和操控,并节省甲板空间。
附图说明
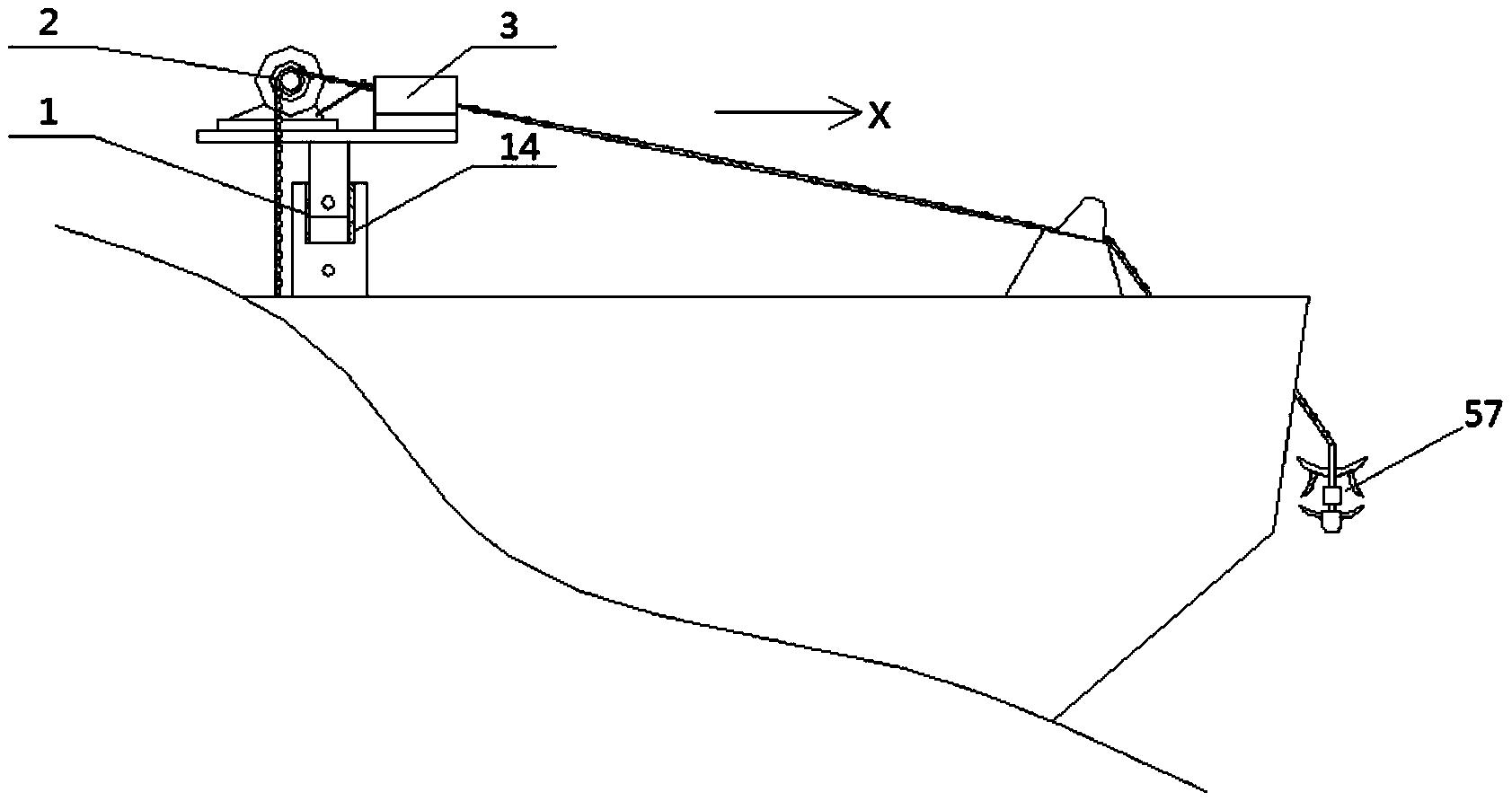
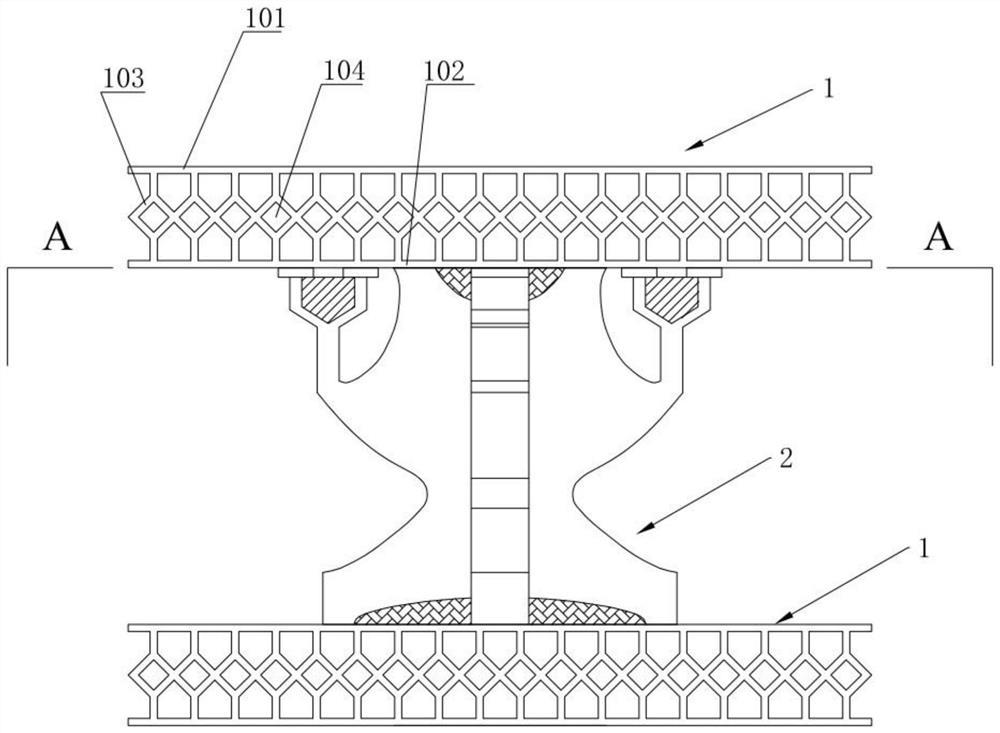
图1为本发明装置进行补给作业时的局部示意图。
图2为本发明装置展开时的结构示意图。
图3为本发明装置收回放置时的结构示意图。
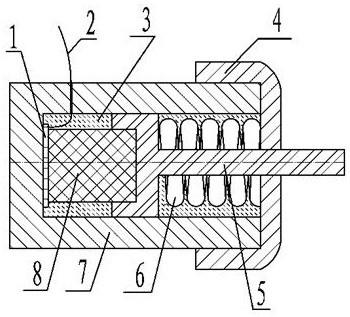
图4为本发明装置液压缓冲机构局部结构图。
图5为本发明装置的安装布置示意图。
图6为本发明装置进行补给作业时的整体示意图。
图7为本发明装置工作流程图。
图中:1.真空吸盘;2.液压缓冲机构;3.机械臂;4.补给船;5.接收船;6.液压连接杆;7.球型铰接;8.转动缓冲部件;9.机械臂下段;10.机械臂中段;11.中段液压驱动轴;12.臂缸;13.机械臂上段一节臂;14.机械臂上段二节臂;15.底座;16.展开的机械吸附装置;17.收回放置于甲板的机械吸附装置;18.波浪补偿式起重机;19.多唇边式结构;20.多层碟形弹簧;21.机械臂与液压缓冲机构连接结构。
具体实施方式
下面结合实施例及附图对本发明作进一步的说明,但不限定本发明。
本发明提供的用于提高船舶并靠补给稳定性的机械吸附装置,如图1所示,主要由真空吸盘1、液压缓冲机构2、机械臂3三部分组成;该装置工作时如图5所示,其为补给工作中的两船提供约束力、缓冲力与推力。
(1)真空吸盘部分:
真空吸盘又称真空吊具,一般来说,是一种带密封唇边的,在与被吸物体接触后形成一个临时性的密封空间,通过抽走或者稀薄密封空间里面的空气,产生内外压力差而进行工作的一种气动元件。
本发明提供的真空吸盘1是以工业生产中的大型真空吸盘以及新的多唇边式结构为基础进行改装设计的,主要实现其能吸附住补给船与目标船,约束两船距离在一定的范围(工作时为1.3m-1.4m)内波动的功能。
所述的真空吸盘1,如图2所示,采用多唇边式结构19,故称多唇边式真空吸盘。其吸盘直径1.2m可吸附在不平整的粗糙表面(针对表面有明显凹坑、凸缘、砂眼等缺陷的重型工件),吸盘唇边材料主要选用聚氨酯、丁腈橡胶或含乙烯基的聚合物等来制造,其内部带有波纹管,可避免舷侧的表面被划伤,减少突变载荷对真空吸盘1的破坏,且防水防油,吸附性高,适用于船舶的舷侧。所述的波纹管主要是由多层可折叠皱纹片沿折叠伸缩方向连接而成的。
所采用的这种多唇边式高适应性真空吸盘1,实现其功能的主要原理有:(1)由于多唇边式结构19的存在,各唇边之间可形成独立的密封范围,其中某一个密封范围发生泄漏并不影响其余范围的吸附效果;(2)柔软的橡胶材料使唇边可根据工件表面缺陷而变化,使其形状与工件表面完成较好的贴合,密封效果更好;(3)多唇边式结构19增大了吸盘与舷侧的接触面积,从而提高了吸附力。
上述的真空吸盘1,其吸盘体末端与下述的液压缓冲机构2两端配合设计成球形铰接7,使吸盘具有一定范围的旋转角度,当船靠过来,提供一定的冲击力,其能根据舷侧平面自动调节角度使吸盘完全贴合与补给船4与接收船5的舷侧,控制系统接收到压力传感器反馈数据之后,操作人员控制装置开始抽真空,其中球形铰接7的连接方式还能使一定的剪切力化为拉压力,当拉力超过临界值时,吸盘鼓入空气,装置释放拉力,只防止两船相互靠近,不再约束两船向外位移。
(2)液压缓冲机构部分:
本发明提供的液压缓冲机构2是一种用于约束船舶运动的装置并运用于并靠补给领域,其原理是基于液压弹簧机构的原理而改进设计的,并实现三方面的功能:缓冲、固定和助推。该液压缓冲机构具有结构紧凑、可靠性较高、维护简单、安装操作方便等优点。主要的原理是通过工作液体和碟形弹簧的弹性变形,使液压连接杆6的位置可以在一定的范围内变化。
该液压缓冲机构2是由现有的AHMA型液压弹簧改装而来,其能在两船相靠提供一定的缓冲力,并在补给作业时阻止两船相互靠近,是其有一定的约束,在补给结束后液压装置给予推力使两船能安全驶离。
所述的液压缓冲机构2,如图4所示,在其两端设计有用于吸盘连接的球铰接7结构,其能使贴附在舷侧的的吸盘在一定范围内转动,并能转化一部分剪切力为拉压力,使吸盘所受的剪切力更小(当超过临界值会自动断开);中间有连接左右真空吸盘1的液压连接杆6,其内有电机、油泵、储能活塞及储能提升杆等部分,主要提供补给结束后两船远离时的推力,并给予外部的弹簧一定支撑力,提升弹簧的刚性系数;中间的缓冲弹簧部分采用的是多层碟形弹簧20结构,其刚度大,缓冲吸振能力强,能以小变形承受大载荷;在碟形弹簧20稍后面的部位是与机械臂连接的结构21,从外部看是一圈往外凸的结构,与机械臂上的臂、杆转动缓冲部件8相配合,在装置收放时,该连接部位处于刚性锁死状态,工作时释放约束,使液压连接杆6以及下端的装置对机械臂的影响最小,机械臂基本不受弯矩;在多层碟形弹簧20内还配有压力传感器,主要用于监测两船之间受力情况,避免突发情况下船体对装置的破坏以及装置对舷侧外板的破坏。该液压弹簧主要参数见表1。
(3)机械臂部分:
工业机械臂其机构一般由一系列相互铰接或相对滑动的构件所组成。它通常有几个自由度,用以抓取或移动物体(工具或工件)。该机械臂机构与一般起重机比较,有如下特点:起重臂(伸缩臂)是折叠式的,分为主臂(垂直臂)和副臂(水平臂与斜臂)两部分,两者用锁定(锁紧)销和油缸相连。
本发明根据折叠臂式起重机以及工业机械臂来设计机械臂3,以实现一个搬运机械臂的功能,用于控制装置的释放、收回和位置的调节,补给运输时其基本不承受外载。
所述的机械臂3为折叠式机械臂,其结构如图2、图3所示,主要由底座15、转动缓冲部件8和四段支杆组成,四段支杆分别是机械臂下段9、机械臂中段10、机械臂上段一节臂13、可旋转二节臂14,其中:底座15固定在甲板上;机械臂上段二节臂14为可旋转二节臂,其能绕底座15旋转;机械臂中段10、机械臂上段一节臂13主要用于释放调节和控制整个机械臂的折叠,使本吸附装置叠放在舷侧,节省空间;垂于舷侧的机械臂下段9可上下伸缩(伸缩范围在2-2.5m内),其最下端与液压缓冲机构2相连接,在其通孔周围有转动缓冲部件8,与液压连接杆6上的连接结构21相配合,其主要由螺旋式弹簧构成,在真空吸盘完成吸附之前处于保护状态,为刚性结构,完成吸附之后释放约束,使液压连接杆6能绕机械臂下段9在小范围内自由转动,螺旋式弹簧能在其角度达到转动极限时以及突发振动时提供缓冲力,避免机械臂2以及液压连接杆6受力过大;当真空吸盘1完成吸附后,机械臂下段9的伸缩驱动机构释放约束,使整个机械臂基本不受其下端的吸附装置(真空吸盘1和液压缓冲机构2)所传递的载荷。
在补给结束后,下端的吸附装置由机械臂3收上并叠放在舷侧,其过程是,首先真空吸盘1鼓入空气,机械臂下段9缩回,臂缸12中的液压泵提供动力使机械臂中段10、机械臂上段一节臂13往回折叠,机械臂上段二节臂14旋转900,此时下端的吸附装置置于舷侧,而展开的机械吸附装置16变成收回放置于甲板的机械吸附装置17,如图2至图3所示。其中,中段液压驱动轴11是连接机械臂中段10与臂缸12的结构,使液压泵所提供的动力从上段机械臂传递到中段。
根据目前的起重机及本发明所需实现的功能,提供表2所示的技术参数。
(4)控制系统:
上述的控制系统由传感器、单片机、机构执行部件等组成,我们主要设计实现其监测与控制的功能,并使其有一定的智能性。其中我们设计的安全警报功能就是很重要的一部分,其主要原因是海上情况多变,不易掌控,两船之间的力(特别是剪切力)超过临界值时,将可能对本装置和船有一定的损害,所以设计了第二种状态:当拉力超过临界值时,警报响起,吸盘自动脱离吸附状态,这时将只提供推力或支撑力,不再提供吸附力。
在所述的吸盘上安装相应的传感器(如压力传感器器、位移传感器、角度传感器等),采集机械设备的相关信息数据,进而反馈给单片机,单片机将传感器信号转换为电路信号,然后电路信号反馈到操作界面,船舶工作人员进行相对应的操作,从而使船员能实时了解装置情况,能在船员的干预下实行自动对接吸附。其过程实质为输入控制信号,处理控制信号以及输出控制信号。
其中,压力传感器安装于多层碟簧20内,位移传感器安装于船舶舷侧以及机械臂下段(9)内,角度传感器安装于球型铰接7以及机械臂各分段连接处。控制信号主要由吸盘受力大小、两船舷侧间距、液压弹簧受力情况、机械臂高度及角度、两船间相对加速度、吊杆相对甲板的加速度等信号组成。单片机用以实现本装置的自动控制与主动控制。控制模式采用三模冗余方式实现,按照规定的时序自动完成真空吸盘1的对接与分离,并配备必要的故障检测信号和应急处理指令,使大风浪情况下本装置不至于破坏船体,工作时则由操作人员根据实际情况进行调控,处理控制信号。执行结构则是机械臂与液压缓冲机构中的液压驱动装置(液压泵)与真空吸盘的驱动装置(真空泵),接收信号并输出控制信号。
所述的机械吸附装置结合这种控制系统使并靠补给摒弃了以往的费时费力,安全性差的不足,船舶操作人员可以根据传感器反馈的信息作出及时有效地调整,例如及时调节机械臂的高度和角度、吸盘吸力的大小等,补给过程有了更加可靠的保证,从而并靠补给变得更加智能化、高效化,同时提高了安全性及可靠性。
(5)机械吸附装置安装与布置设计:
本发明提供的上述的机械吸附装置,安装布置及整体如图5、图6所示,其技术参数及在船舶上的具体布置情况及对船体影响的计算如下:
本发明装置空间尺度:工作时约束两船宽度1.3-1.4m,整个装置叠放于甲板上所占空间为2.5×1×3m(长×宽×高)。
上述的装置设计时是采用“福清”级补给舰为母型船进行设计的,如图5中简化补给船4,具体应用可根据船型参数对装置进行改装。该母型船上层建筑分前后两部分,为传统型布局。舰上设有一个大型桥楼,其前方货舱的两侧装有2台回转式吊车,其后的舰体舯部平台处设有2个液货补给门架和1个干货补给门架,艉楼后端设有直升机起降平台,可以实现垂直补给。并且配备对升沉波浪有补偿功能的波浪补偿式起重机18。船舶主要参数见表3。
由该母型船进行了本装置对船舶影响的计算,单套装置所占甲板空间为2.5×1×3m=7.5m,所以船上左右共布置10套该装置共需75m
所述的单套装置,包括真空吸盘1、液压缓冲机构2、机械臂3等部分,其重量为300+291+140×2=871kg,所以布置整个系统10套装置的总重量为8710kg(8.71t),由于船舶满载排水为两万吨级,根据每厘米吃水吨数TPC曲线(吃水9m时约为25t/cm),可知对船舶吃水基本无影响。再由于对称分布,在一侧装置工作时,两侧装置重心离船中线面距离分别约为10.5m、11.2m,然后根据横倾力矩、复原力矩、横倾角等公式简单计算,可以了解对船舶横倾的影响:
MH=p(y2-y1)cosα
MR=ΔGMsinα
式中:p为一侧装置重量5x0.871(t),y1=10.5(m),y2=11.2(m),α为横倾角(°),△为排水量(t),GM为初稳性高(m)(范围2—3.5m),MH为横倾力矩(t*m),MR为复原力矩(t*m),tanα为横倾角的正切。
由上述公式计算出的横倾角远小于1°,其数量级接近10
由上述的计算并考虑到船舶和装置的受力,船舶大小,风浪流的影响等情况,本实施例在船舶左右各布置五套装置。
(6)本发明装置工作流程:
本发明提供的用于提高船舶并靠补给稳定性的机械吸附装置,其工作过程如下:
参见图7,整个装置的工作过程主要分为系统启动、装置展开调节、并靠吸附、补给作业、撤离收回。
(a)系统启动:当接收船靠近时,打开系统控制开关,启动控制界面;
(b)展开调节:底盘转动将机械臂和吸附缓冲装置转到舷侧,传感器实时监测数据反馈给系统;
(c)船员控制调整装置到合适位置;
(d)并靠吸附:接收船靠近补给船,吸盘紧贴船壳,真空装置抽气,进行吸附;
(e)补给作业:吸盘和液压弹簧装置,约束两船间的相互运动,使两船趋于相对稳定船上。船上的补给系统开始进行运输工作;
(f)撤离收回:吸盘鼓入空气,脱离吸附状态,液压装置开始工作,将接收船推开,接收船同时向前撤离。控制装置收回,折叠放于甲板一侧。
表1 液压弹簧设计参数
表2 机械臂设计参数情况
表3 母型补给船设计参数情况
用于提高船舶并靠补给稳定性的机械吸附装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0