








专利摘要
本发明提供一种可巡航自配平的半翼身融合无尾式无人机翼型族,包括第一翼型、第二翼型和第三翼型;第一翼型、第二翼型和第三翼型在机翼上的展向位置分别为:第一翼型位于机翼根部,第二翼型位于机翼展向28.1%处,第三翼型位于机翼稍部;第一翼型、第二翼型和第三翼型的最大相对厚度分别为14.00%、11.00%、11.90%;最大厚度的相对位置分别为30.60%、30.60%、33.90%。具有以下优点:本发明提供的翼型族是针对无尾布局无人机的巡航状态设计的,在低马赫数和低雷诺数下,无人机实现巡航自配平,具有高升力、低阻力、高升阻比、失速特性缓和的特点。
权利要求
1.一种可巡航自配平的半翼身融合无尾式无人机翼型族,其特征在于,包括第一翼型、第二翼型和第三翼型;
所述第一翼型、所述第二翼型和所述第三翼型在机翼上的展向位置分别为:所述第一翼型位于机翼根部,所述第二翼型位于机翼展向28.1%处,所述第三翼型位于机翼稍部;
所述第一翼型、所述第二翼型和所述第三翼型的最大相对厚度分别为14.00%、11.00%、11.90%;最大厚度的相对位置分别为30.60%、30.60%、33.90%;其中,所述最大相对厚度为各翼型上下两个面之间最大距离与弦线的长度的比值,所述弦长是翼型前缘到后缘的弦线的长度;
所述第一翼型、所述第二翼型和所述第三翼型的最大相对弯度分别为2.168%、2.167%、1.598%,最大弯度的相对位置分别为18.00%、17.90%、36.80%;
所述第一翼型、所述第二翼型和所述第三翼型的前缘半径分别为1.234%、0.736%、0.972%;
所述第一翼型、所述第二翼型和所述第三翼型均为钝后缘,后缘厚度分别为0.626%、0.492%、0.0%;
所述第一翼型、所述第二翼型和所述第三翼型的扭转角分别为1度,1度,-7度;
其中,所述第一翼型的无量纲几何坐标为:
其中,x/c值表示翼型曲线上某点在弦线方向上相对于前缘的位置,y/c值表示从弦线到翼型曲线上某点的高度,在弦线上方为正,在弦线下方为负;
其中,所述第二翼型的无量纲几何坐标为:
其中,x/c值表示翼型曲线上某点在弦线方向上相对于前缘的位置,y/c值表示从弦线到翼型曲线上某点的高度,在弦线上方为正,在弦线下方为负;
其中,所述第三翼型的无量纲几何坐标为:
其中,x/c值表示翼型曲线上某点在弦线方向上相对于前缘的位置,y/c值表示从弦线到翼型曲线上某点的高度,在弦线上方为正,在弦线下方为负。
说明书
技术领域
本发明属于气动外形/翼型设计技术领域,具体涉及一种可巡航自配平的半翼身融合无尾式无人机翼型族。
背景技术
无人机技术在世界范围内蓬勃发展,不断涌现出性能各异、技术先进以及用途广泛的无人机。无人机具有机动性强、效费比高、使用灵活等优点,随着现代技术的不断发展,无人机在民用和军用领域都得到了广泛的应用。为了提高无人机的巡航性能,可巡航自配平能力在无人机的使用中显得尤为重要。
半翼身融合式无人机将传统的机身与机翼光滑过渡,与传统的柱状机身加机翼布局飞机相比,具有一体化成型、空气动力效率高等优点,在军用和民用领域内都有良好的前景。
翼型是飞机机翼设计的基础,翼型设计成功与否从根本上决定飞机设计的成败。而我国至今为止没有系统地对半翼身融合无尾式无人机的高巡航性能翼型进行过研究。为了进一步提高半翼身融合无尾式无人机的作战性能和用途广泛性,目前,提升其在巡航状态下的气动性能显得尤为重要。
发明内容
针对现有技术存在的缺陷,本发明提供一种可巡航自配平的半翼身融合无尾式无人机翼型族,可有效解决上述问题。
本发明采用的技术方案如下:
本发明提供一种可巡航自配平的半翼身融合无尾式无人机翼型族,包括第一翼型、第二翼型和第三翼型;
所述第一翼型、所述第二翼型和所述第三翼型在机翼上的展向位置分别为:所述第一翼型位于机翼根部,所述第二翼型位于机翼展向28.1%处,所述第三翼型位于机翼稍部;
所述第一翼型、所述第二翼型和所述第三翼型的最大相对厚度分别为14.00%、11.00%、11.90%;最大厚度的相对位置分别为30.60%、30.60%、33.90%;其中,所述最大相对厚度为各翼型上下两个面之间最大距离与弦线的长度的比值,所述弦长是翼型前缘到后缘的弦线的长度;
所述第一翼型、所述第二翼型和所述第三翼型的最大相对弯度分别为2.168%、2.167%、1.598%,最大弯度的相对位置分别为18.00%、17.90%、36.80%;
所述第一翼型、所述第二翼型和所述第三翼型的前缘半径分别为1.234%、0.736%、0.972%;
所述第一翼型、所述第二翼型和所述第三翼型均为钝后缘,后缘厚度分别为0.626%、0.492%、0.0%;
所述第一翼型、所述第二翼型和所述第三翼型的扭转角分别为1度,1度,-7度。
优选的,所述第一翼型的无量纲几何坐标为:
其中,x/c值表示翼型曲线上某点在弦线方向上相对于前缘的位置,y/c值表示从弦线到翼型曲线上某点的高度,在弦线上方为正,在弦线下方为负。
优选的,所述第二翼型的无量纲几何坐标为:
其中,x/c值表示翼型曲线上某点在弦线方向上相对于前缘的位置,y/c值表示从弦线到翼型曲线上某点的高度,在弦线上方为正,在弦线下方为负。
优选的,所述第三翼型的无量纲几何坐标为:
其中,x/c值表示翼型曲线上某点在弦线方向上相对于前缘的位置,y/c值表示从弦线到翼型曲线上某点的高度,在弦线上方为正,在弦线下方为负。
本发明提供的一种可巡航自配平的半翼身融合无尾式无人机翼型族具有以下优点:
本发明提出了一种最大相对厚度为11.00%~14.00%,侧重于巡航特性的翼型族。该翼型族具有巡航自配平的能力,在巡航点定升力系数为0.35时俯仰力矩仅为0.0003275,力矩拐点大于12度。
本发明提供的翼型族是针对无尾布局无人机的巡航状态设计的,在低马赫数和低雷诺数下,无人机实现巡航自配平,具有高升力、低阻力、高升阻比、失速特性缓和的特点。
附图说明
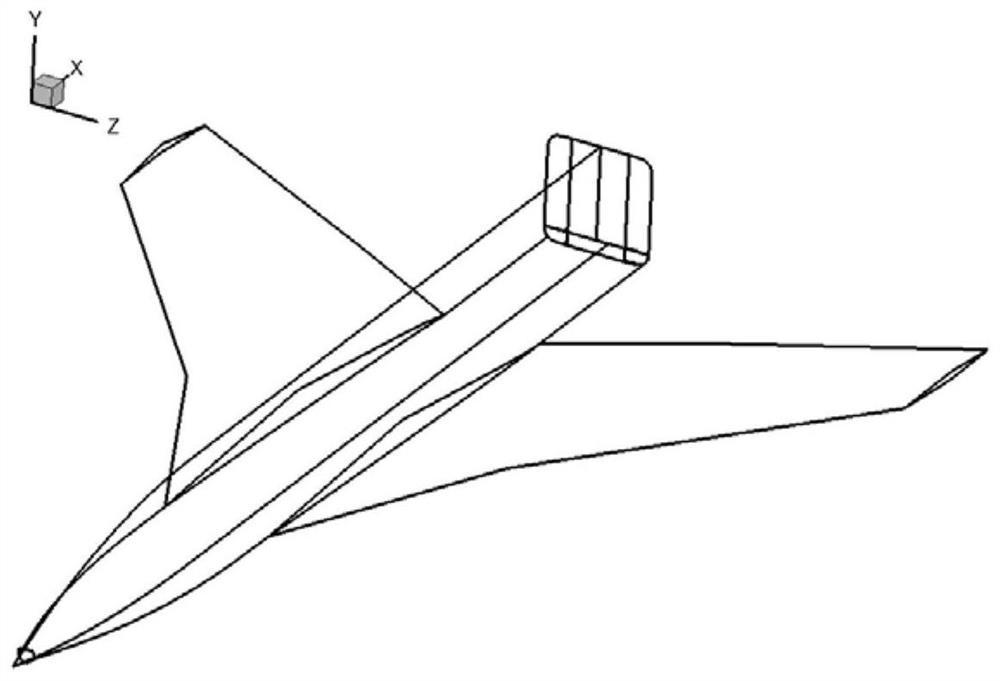
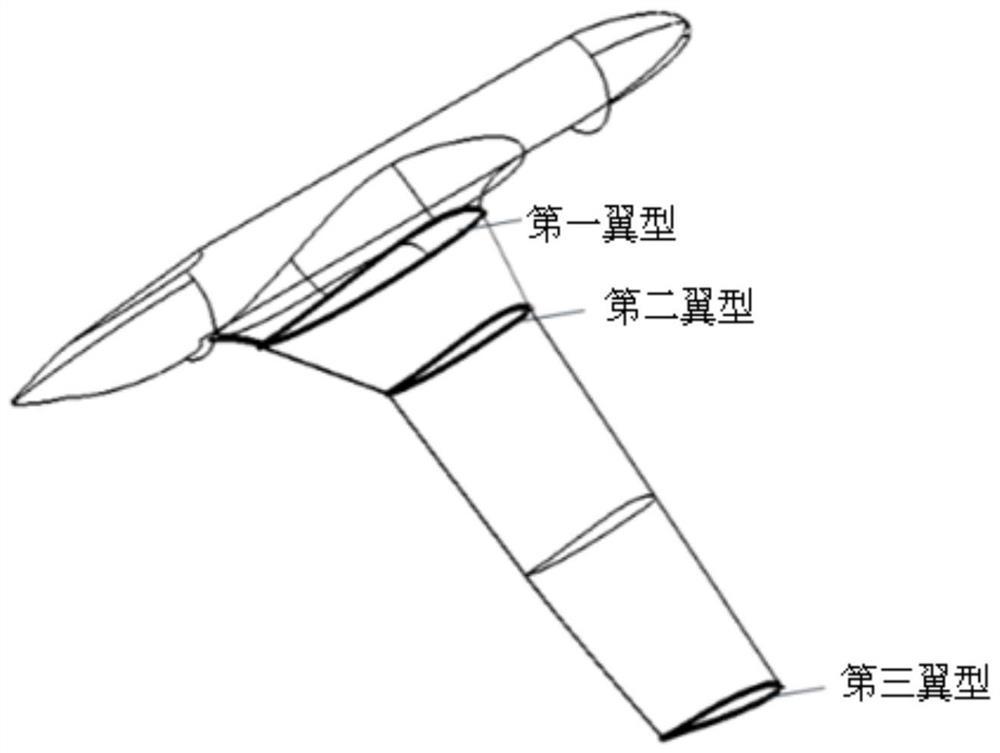
图1为本发明提供的无尾后掠翼布局的半翼身融合无尾式无人机在一个角度下的模型线图;图中粗线分别为各翼型在该无人机机翼展向使用位置示意图;
图2为本发明提供的无尾后掠翼布局的半翼身融合无尾式无人机在另一个角度下的模型线图;图中粗线分别为各翼型在该无人机机翼展向使用位置示意图;
图3为本发明提供的无尾后掠翼布局的半翼身融合无尾式无人机的模型实体图;
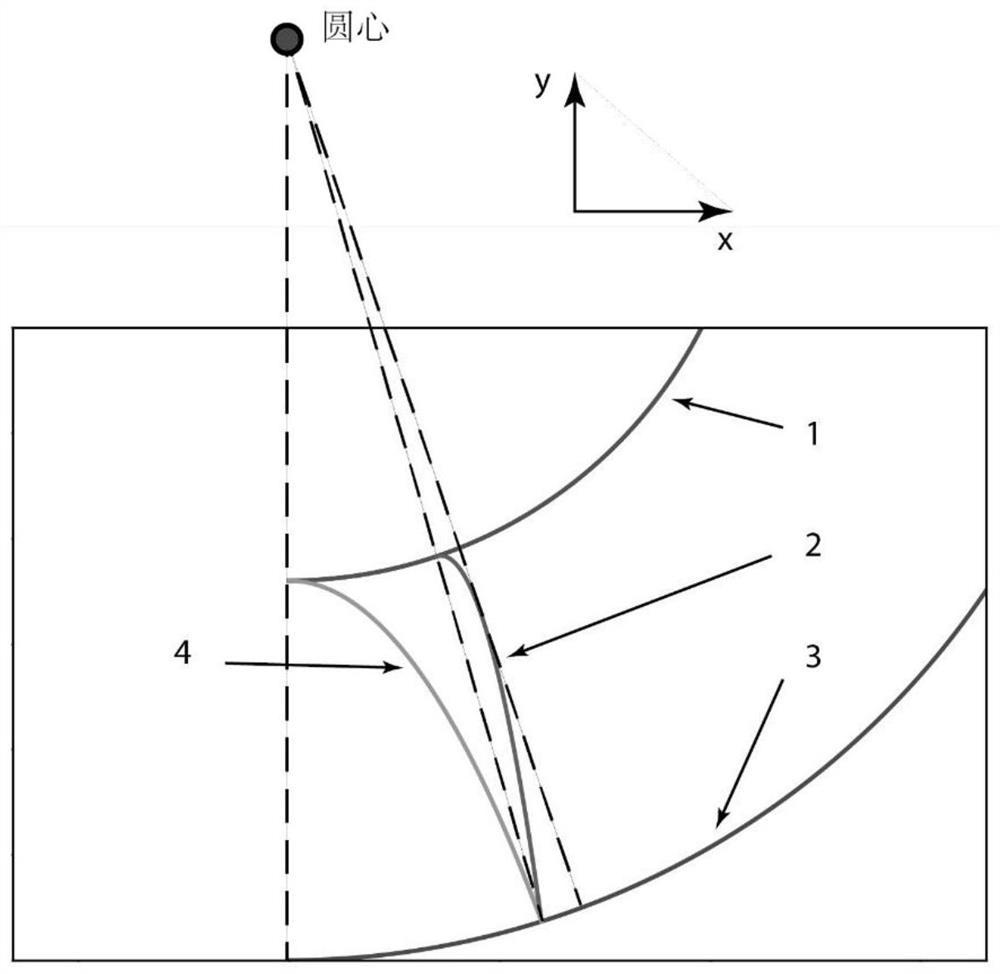
图4为本发明的无尾后掠翼布局的半翼身融合无尾式无人机专用翼型族的组合图;
图5为本发明的无尾后掠翼布局的半翼身融合无尾式无人机专用翼型族中第一翼型与初始翼型的轮廓对比图;
图6为本发明的无尾后掠翼布局的半翼身融合无尾式无人机专用翼型族中第二翼型与初始翼型的轮廓对比图;
图7为本发明的无尾后掠翼布局的半翼身融合无尾式无人机专用翼型族中第三翼型与初始翼型的轮廓对比图;
图8为本发明的无尾后掠翼布局的半翼身融合无尾式无人机专用翼型族中第一翼型与原始构型翼型族中第一翼型的升力系数CL随攻角变化曲线图;
图9为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第一翼型与原始构型翼型族中第一翼型的阻力系数CD随攻角变化曲线图;
图10为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第一翼型与原始构型翼型族中第一翼型的俯仰力矩系数Cm随攻角变化曲线图;
图11为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第一翼型与原始构型翼型族中第一翼型的升阻比K随攻角变化曲线图;
图12为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第二翼型与原始构型翼型族中第二翼型的升力系数CL随攻角变化曲线图;
图13为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第二翼型与原始构型翼型族中第二翼型的阻力系数CD随攻角变化曲线图;
图14为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第二翼型与原始构型翼型族中第二翼型的俯仰力矩系数Cm随攻角变化曲线图;
图15为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第二翼型与原始构型翼型族中第二翼型的升阻比K随攻角变化曲线图;
图16为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第三翼型与原始构型翼型族中第三翼型的升力系数CL随攻角变化曲线图;
图17为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第三翼型与原始构型翼型族中第三翼型的阻力系数CD随攻角变化曲线图;
图18为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第三翼型与原始构型翼型族中第三翼型的俯仰力矩系数Cm随攻角变化曲线图;
图19为本发明的无尾后掠翼布局的半翼身融合式无人机专用翼型族中第三翼型与原始构型翼型族中第三翼型的升阻比K随攻角变化曲线图;
图20为由本发明的翼型族构成的全机构型与初始全机构型的升力系数CL随攻角变化的对比图;
图21为由本发明的翼型族构成的全机构型与初始全机构型的阻力系数CD随攻角变化的对比图;
图22为由本发明的翼型族构成的全机构型与初始全机构型的俯仰力矩系数Cm随攻角变化的对比图;
图23为由本发明的翼型族构成的全机构型与初始全机构型的升阻比K随攻角变化曲线的对比图;
图24为由本发明的翼型族构成的全机构型、初始全机构型所得的环量分布与椭圆环量分布的对比图,图中横坐标为沿机翼展向的相对位置,纵坐标为真实环量。
具体实施方式
为了使本发明所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
半翼身融合无尾式无人机采用无尾后掠翼布局可以减小阻力,提高升阻比,改善其气动性能。同时,无尾后掠翼布局的半翼身融合式无人机在设计过程中面临着挑战:飞行器需在飞行中保持良好的稳定性和操纵性,而无尾布局由于没有平尾提供配平能力,导致飞行器在飞行过程中不能巡航自配平。本发明主要针对飞行器巡航状态自配平方面进行改进。本发明提供一种可巡航自配平的半翼身融合无尾式无人机翼型族,该翼型族侧重于巡航特性,在满足巡航自配平的前提下,在巡航点具有较高的升力系数和升阻比性能。
具体的,通过使用先进的翼型设计技术,本发明使得翼型族在满足巡航自配平的前提下,能够在较低的设计升力系数、较低的飞行马赫数和较低的飞行雷诺数下,具有较高的升阻比,从而提高巡航效率,针对巡航状态,开展翼型族设计,指标要求为:
1.巡航状态下俯仰力矩Cm≈0±0.015;
2.无尾后掠翼布局的半翼身融合式无人机的工作状态如下:
巡航状态:Ma=0.1,Re=2.33E6,CL=0.35;
依据上述设计指标,本发明采用计算机流体力学方法,设计状态偏重巡航点,提出一种适用于无尾后掠翼布局的半翼身融合式无人机侧重于巡航特性的,可巡航自配平,高升力、低阻力、高升阻比的翼型族。
本发明翼型族和初始翼型族中各翼型的几何参数如表1和表2所示:
表1:改进翼型族中各翼型的几何参数
本发明提供的第一翼型、所述第二翼型和所述第三翼型,其扭转角分别为1度,1度,-7度。
表2:初始翼型族中各翼型的几何参数
在本发明说明书以及附图中,改进翼型为本发明设计的第一翼型、第二翼型和第三翼型。而初始翼型为现有技术中的翼型。
本发明提供的第一翼型、第二翼型和第三翼型,各翼型外形的无量纲数据如下表所示:
本发明第一翼型的无量纲几何坐标为:
本发明第二翼型的无量纲几何坐标为:
本发明第三翼型的无量纲几何坐标为:
其中,x/c值表示翼型曲线上某点在弦线方向上相对于前缘的位置;y/c值表示从弦线到翼型曲线上某点的高度,在弦线上方为正,在弦线下方为负。表中无量纲坐标次序从翼型尾缘(x/c=1)开始,沿压力面向前到前缘(x/c=0),再从前缘沿吸力面回到尾缘(x/c=1)为止。
参照图1-图3,显示了各翼型在无尾后掠翼布局的半翼身融合式无人机机翼展向位置示意图,所述第一翼型、所述第二翼型和所述第三翼型在机翼上的展向位置分别为:第一翼型位于机翼根部,第二翼型位于机翼展向28.1%处,第三翼型位于机翼稍部。图3显示了无尾后掠翼布局的半翼身融合式无人机模型实体图,更易看出机翼与机身半融合。
参照图4,图4给出了本发明翼型族中各翼型的组合图,同时本发明得到不同展向位置处的翼型与初始翼型的轮廓对比图,如图5~7所示。
图8-图11,显示了本发明第一翼型与初始翼型的气动特性对比曲线。图12-15,显示了本发明第二翼型与初始翼型的气动特性对比曲线。图16-19,显示了本发明第三翼型与初始翼型的气动特性对比曲线。对于每组气动特性对比曲线,依次包括:升力系数CL随攻角变化曲线;阻力系数CD随攻角变化曲线;俯仰力矩系数Cm随攻角变化曲线;升阻比K随攻角变化曲线。
图20-图23,分别为由本发明的翼型族构成的全机构型与初始全机构型的气动特性对比图(依次是:升力系数CL随攻角变化曲线;阻力系数CD随攻角变化曲线;俯仰力矩系数Cm随攻角变化曲线;升阻比K随攻角变化曲线)。从图可以看出:本发明的全机构型与初始全机构型相比,在攻角0度之后,阻力系数降低;在巡航点CL=0.35处,阻力系数变化不大,但是俯仰力矩系数由-0.02654变为0.0003275,无人机可实现巡航自配平,减小配平阻力。
图24给出了初始全机构型和由本发明的翼型族构成的全机构型在巡航状态,即定升力CL=0.35处的环量分布,以及理想中椭圆环量分布,从图24中可以看出,由本发明的翼型族构成的全机构型所得到的环量分布更接近于椭圆环量分布,其中沿机翼展向相对位置为0.6以内的环量分布基本与椭圆环量分布重合,因此极大地减小了诱导阻力。
由此可见,本发明提供的可巡航自配平的半翼身融合无尾式无人机翼型族,是针对无尾布局无人机的巡航状态设计的,在低马赫数和低雷诺数下,无人机实现巡航自配平,具有高升力、低阻力、高升阻比、失速特性缓和的特点。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本发明的保护范围。
一种可巡航自配平的半翼身融合无尾式无人机翼型族专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0