








专利摘要
本发明提供一种桁架式可折展抓捕变胞机构,包括多个变胞单元,变胞单元包括:抓捕机构,其包括两根剪叉杆、两根连杆,两根剪叉杆通过转动副R1互相连接,形成剪叉机构;两根连杆的底端分别通过转动副R2、转动副R3连接于两根剪叉杆的顶端;滑动分支包括通过滑动副Pa1连接的第一滑动杆、第二滑动杆;第一滑动杆与连杆的顶端通过转动副R4连接;转动分支包括转动连接的第一转动杆、第二转动杆、第三转动杆、第四转动杆;第一转动杆通过转动副R5连接于剪叉杆的底端,第四转动杆、第二滑动杆通过转动副Ra4连接;两个随动分支单元通过铰链机构互相连接。本发明采用桁架式结构,整体重量轻,有利于降低运载成本;采用变胞结构,降低整体结构所占用的空间。
权利要求
1.一种桁架式可折展抓捕变胞机构,其特征在于,包括多个相同的变胞单元,所述变胞单元包括:
抓捕机构,其包括两根相同的剪叉杆、两根相同的连杆,两根所述剪叉杆通过转动副R1互相连接,形成剪叉机构;两根所述连杆的底端分别通过转动副R2、转动副R3连接于两根所述剪叉杆的顶端;
两个相同的随动分支机构,所述随动分支机构包括滑动分支、转动分支;
所述滑动分支包括第一滑动杆、第二滑动杆,所述第一滑动杆、所述第二滑动杆通过滑动副Pa1连接;所述第一滑动杆与所述连杆的顶端通过转动副R4连接;
所述转动分支包括第一转动杆、第二转动杆、第三转动杆、第四转动杆;所述第一转动杆、所述第二转动杆通过转动副Ra1连接,所述第二转动杆、所述第三转动杆通过转动副Ra2连接,所述第三转动杆、所述第四转动杆通过转动副Ra3连接;所述第一转动杆通过转动副R5连接于所述剪叉杆的底端,所述第四转动杆、所述第二滑动杆通过转动副Ra4连接;
两个所述随动分支机构通过铰链机构互相连接,所述铰链机构包括两个相同的叶片,两个所述叶片通过转动副R
2.如权利要求1所述的桁架式可折展抓捕变胞机构,其特征在于,所述第一滑动杆为折弯杆;所述第三转动杆和所述第四转动杆为折弯杆。
3.如权利要求1所述的桁架式可折展抓捕变胞机构,其特征在于,所述转动分支中,转动副Ra1、转动副Ra2、转动副Ra3的运动螺旋为:
其中,l
三个转动副Ra1、转动副Ra2、转动副Ra3的轴线不共线,且斜交于一平面。
4.如权利要求3所述的桁架式可折展抓捕变胞机构,其特征在于,所述转动分支中,转动副Ra4的运动螺旋为:
$
其中,a
转动副Ra4的轴线始终垂直于三个转动副Ra1、转动副Ra2、转动副Ra3的轴线所斜交的平面。
5.如权利要求4所述的桁架式可折展抓捕变胞机构,其特征在于,所述滑动分支中,滑动副Pa1的运动螺旋为:
$
其中,m
滑动副Pa1的轴线始终平行于三个转动副Ra1、转动副Ra2、转动副Ra3的轴线所斜交的平面。
6.如权利要求1所述的桁架式可折展抓捕变胞机构,其特征在于,所述变胞单元还包括伸缩分支机构,所述伸缩分支机构包括:
两根支杆,所述两根支杆的始端通过滑动副P1互相连接,所述两根支杆的末端分别通过转动副R5连接于两根所述剪叉杆的底端。
7.如权利要求6所述的桁架式可折展抓捕变胞机构,其特征在于,相邻的所述变胞单元共用一个所述伸缩分支机构。
8.如权利要求1所述的桁架式可折展抓捕变胞机构,其特征在于,多个所述变胞单元,沿着所述剪叉杆的伸展方向进行拓展,形成可折展抓捕机械臂。
9.如权利要求8所述的桁架式可折展抓捕变胞机构,其特征在于,所述桁架式可折展抓捕变胞机构还包括底盘,多个所述可折展抓捕机械臂以圆周阵列排布至所述底盘上。
10.如权利要求1所述的桁架式可折展抓捕变胞机构,其特征在于,转动副R2、转动副R3的轴线不共线时,所述剪叉杆、所述连杆进行折展过程;转动副R2、转动副R3的轴线共线时,所述连杆相对所述剪叉杆所在平面进行翻转。
说明书
技术领域
本发明涉及一种桁架式可折展抓捕变胞机构。
背景技术
空间机械臂具有一体化的空间感知、机动和操作能力,通过在轨操作、地面遥操作或自主操作方式完成航天器的在轨装配、污染清理、观测与检查、故障模块更换、在轨加注、消耗载荷更换和补充、轨道清理、轨道转移等工作,是航天器在轨组装与维护的核心装备。
中国专利文献CN107685881A公开了一种空间柔性捕获装置以及其捕获方法,该捕获装置由用于回收的系绳、缠绕目标物体的甩绳、两根甩杆及机架组成。其仅仅采用两根具有黏贴部的甩绳即可完成对目标的捕获任务。该装置的操作距离远,适用对象较为广泛,且在捕捉过程中对控制系统的要求较低。
中国专利文献CN106584507A公开了一种全柔性气动机械臂结构,其结构呈纵长的圆锥形。该机械臂主要由全柔性机械臂主体、机械臂中心体及均匀围绕机械臂中心体轴对称分布的气道组成。其中,气道从直径大的一端向直径小的一端延伸并距离端面一定距离以保持住气道内的气体,机械臂外表面设置一层纤维增强复合材料。柔性机械臂主体采用超弹性材料,具有很强的变形能力。该装置适用于抓捕复杂形状的物体。
中国专利文献CN106584507A公开了一种夹持式充气抓捕手,其具有两个对称的机械臂。该机械臂可以完成向内侧夹持动作和向外侧张开动作。为完成这两种运动,在机械臂的前端装有一个弧形的充气伸展臂,在伸展臂的外侧设置有纵向的卷簧,其外侧表面与对应的伸展臂粘接。该捕捉手可捕捉空间大尺寸非合作目标。
上述现有技术方案均采用柔性件作为机构主体,因此机构整体刚度较差,不适合在太空中捕获运动中的物体。此外,采用柔性件,会局限抓捕机构的尺寸,从而限制了捕捉对象的范围。
因此,需要提供一种桁架式可折展抓捕变胞机构,在提高可折展抓捕机构整体的刚度的前提下,降低整体结构的重量,结合变胞原理,使机构可以发生尺寸变化,从而扩大抓捕目标的范围。
发明内容
针对现有技术的缺陷,本发明提供了一种桁架式可折展抓捕变胞机构,采用桁架式结构,整体重量轻,有利于降低运载成本;采用变胞结构,降低整体结构所占用的空间。
为了实现上述目的,本发明提供了一种桁架式可折展抓捕变胞机构,其中,包括多个相同的变胞单元,变胞单元包括:
抓捕机构,其包括两根相同的剪叉杆、两根相同的连杆,两根剪叉杆通过转动副R1互相连接,形成剪叉机构;两根连杆的底端分别通过转动副R2、转动副R3连接于两根剪叉杆的顶端;
两个相同的随动分支机构,随动分支机构包括滑动分支、转动分支;
滑动分支包括第一滑动杆、第二滑动杆,第一滑动杆、第二滑动杆通过滑动副Pa1连接;第一滑动杆与连杆的顶端通过转动副R4连接;
转动分支包括第一转动杆、第二转动杆、第三转动杆、第四转动杆;第一转动杆、第二转动杆通过转动副Ra1连接,第二转动杆、第三转动杆通过转动副Ra2连接,第三转动杆、第四转动杆通过转动副Ra3连接;第一转动杆通过转动副R5连接于剪叉杆的底端,第四转动杆、第二滑动杆通过转动副Ra4连接;
两个随动分支单元通过铰链机构互相连接,铰链机构包括两个相同的叶片,两个叶片通过转动副RL1连接,叶片通过转动副RL2连接于第三转动杆。
本发明中,变胞单元中的两根剪叉杆、两根连杆形成的抓捕面,在该抓捕面形成了三个具有特殊几何位置的转动副,利用轴线垂直于该抓捕面表面的转动副R1来提供折展自由度从而完成折展运动,在这个过程中因为另外两个转动副R2、转动副R3的轴线不共线,从而无法进行抓捕运动。当这两个转动副R2、转动副R3的轴线共线时,该抓捕面即可开始抓捕运动。
本发明中,两个随动分支机构在变胞单元进行折展、抓捕过程中,不会对抓捕面产生额外的自由度,使抓捕面始终有且只有一个自由度,即折展状态下,只有折展自由度;抓捕状态下,只有抓捕自由度。
本发明中,转动副R1在两个剪叉杆靠近中间的位置,在折展过程中,剪叉杆、连杆形成标准的剪叉机构,即转动副位于连杆、剪叉杆所组成的新的剪叉杆的中部。
根据本发明的另一种具体实施方式,转动副RL2和转动副Ra3形成复合铰链机构,实现滑动分支、转动分支、铰链机构之间的活动连接。
根据本发明的另一种具体实施方式,第一滑动杆为折弯杆;第三转动杆、第四转动杆为折弯杆。由于随动分支机构为立体空间结构,在折展、抓捕过程中,各个部件之间的位置发生变化,在不改变随动分支机构各个运动副之间关系的前提下,将部分部件采用折弯杆的方式,可以避免各个部件之间发生干涉,以防止碰撞对整体机构的影响。
根据本发明的另一种具体实施方式,转动分支中,转动副Ra1、转动副
Ra2、转动副Ra3的运动螺旋为:
其中,li,mi,ni,ai,bi(i=1,2,3)为任意常数;
三个转动副Ra1、转动副Ra2、转动副Ra3的轴线不共线,且斜交于第一平面,例如,YOZ平面。
根据本发明的另一种具体实施方式,转动分支中,转动副Ra4的运动螺旋为:
$a4=(1 0 0 ; 0 a4 b4)
其中,a4,b4为任意常数;
转动副Ra4的轴线始终垂直于第一平面,例如,当第一平面为YOZ平面时,转动副Ra4的轴线沿着平行于X轴的方向。
根据本发明的另一种具体实施方式,滑动分支中,滑动副Pa1的运动螺旋为:
$a5=(0 0 0 ; 0 m5 n5)
其中,m5,n5为任意常数;
滑动副Pa1的轴线始终平行于第一平面。
根据本发明的另一种具体实施方式,变胞单元还包括伸缩分支机构,伸缩分支机构包括:
两根支杆,两根支杆的始端通过滑动副P1互相连接,两根支杆的末端分别通过转动副R5连接于两根剪叉杆的底端。本方案的伸缩分支机构中,两个转动副R5和一个滑动副P1组成了平面运动副,由平面运动副的性质可知,当转动副R2和转动副R3轴线共线时,该抓捕机构将具备绕转动副R2的轴线旋转的自由度,即抓捕自由度,由于受R4、R5和P1所组成的平面运动的约束影响,转动副R1将会失效,即该抓捕机构有且只有一个自由度,即转动副R2和转动副R3所提供的抓捕自由度。
根据本发明的另一种具体实施方式,相邻的变胞单元共用一个伸缩分支机构。相应的,连杆的结构可以进行适应性调整,例如采用截面为工字形的连杆,方便相邻的变胞单元之间的连接。
根据本发明的另一种具体实施方式,多个变胞单元,沿着折叠杆的伸展方向进行拓展,形成可折展抓捕机械臂。例如,采用四个变胞单元,相邻的变胞单元进行串联,经过每一个变胞单元的折展运动后,该机械臂将会完全展开至合适的长度,以备抓捕过程。
根据本发明的另一种具体实施方式,刚性可折展抓捕机构还包括底盘,多个可折叠抓捕机械臂以圆周阵列排布至底盘上。如,采用四个可折展抓捕机械臂,该机械臂在折叠状态下,占用的空间小,使其可以放置在空间较小的运载火箭上,在完全展开后,整体结构较大,可以适应较大目标尺寸的抓捕。
根据本发明的另一种具体实施方式,转动副R2、转动副R3的轴线不共线时,剪叉杆、连杆进行折展过程;转动副R2、转动副R3的轴线共线时,连杆相对剪叉杆所在平面进行翻转。在整个过程中,该结构有且仅有一个方向的自由度,当转动副R2、转动副R3的轴线不共线时,该变胞单元有且仅有一个折展自由度;当转动副R2、转动副R3的轴线共线时,该变胞单元有且仅有一个抓捕自由度。
本发明中,通过三个转动副Ra1、转动副Ra2、转动副Ra3的运动螺旋,和转动副Ra4的运动螺旋,和滑动副Pa1的运动螺旋,可得到随动分支机构的约束螺旋为:
即,该随动分支机构将会约束某一轴向(例如,X轴)移动的自由度,只会产生沿着该轴(X轴)的约束力线矢,从而保证该随动分支机构不会对抓捕面产生额外的约束,即在提供整体结构的同时,不会影响整体的自由度。
本发明中的铰链机构为类似活页的连接方式,需要说明的是,文中的叶片可以采用多种形式的结构,例如L形杆、V形杆等。
本发明的有益之处在于:
1、本发明采用桁架式结构,在保证整体机构刚度的前提下,降低整体的质量,减轻运载火箭的负担;
2、采用变胞结构,使整体机构的尺寸可以自由控制,通过伸展实现由小机构变胞为大机构,可以扩大可抓捕物体的范围,适用性强。
下面结合附图对本发明作进一步的详细说明。
附图说明
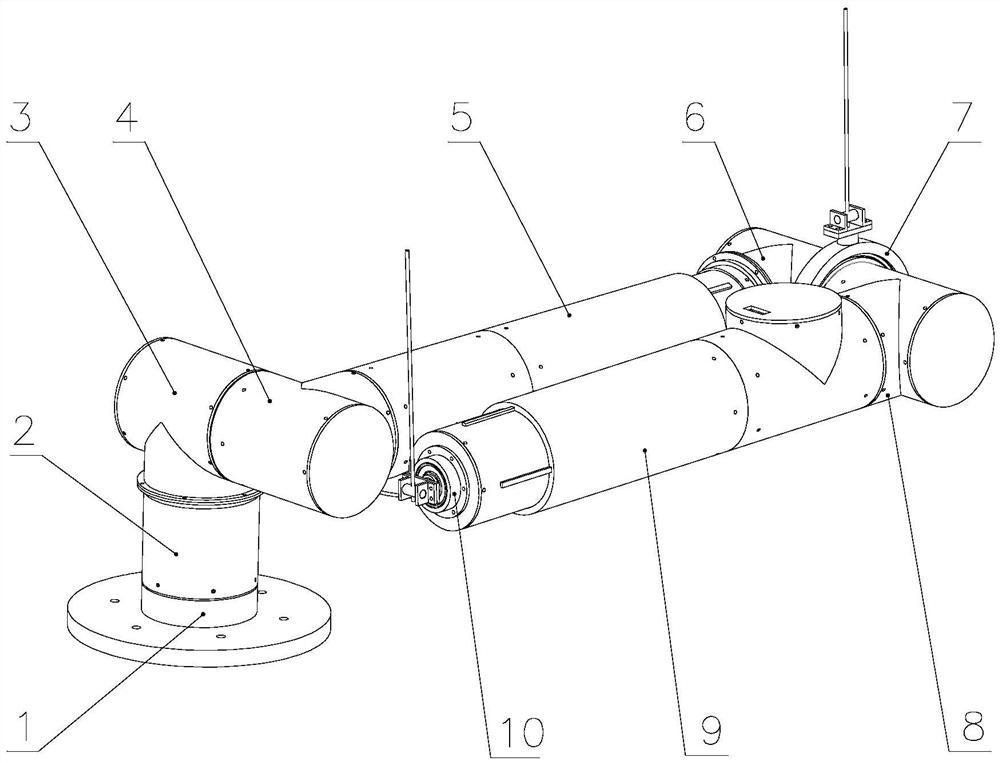
图1是实施例1的变胞单元的整体结构示意图;
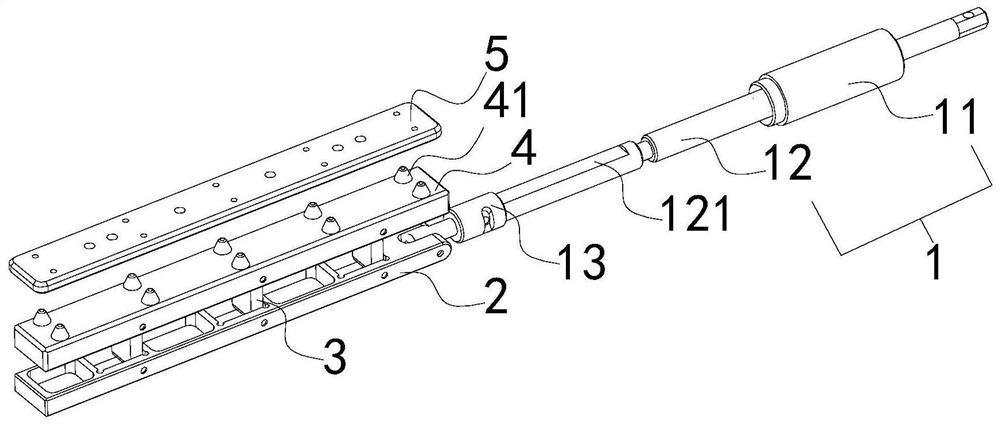
图2是图1中,抓捕机构的结构示意图;
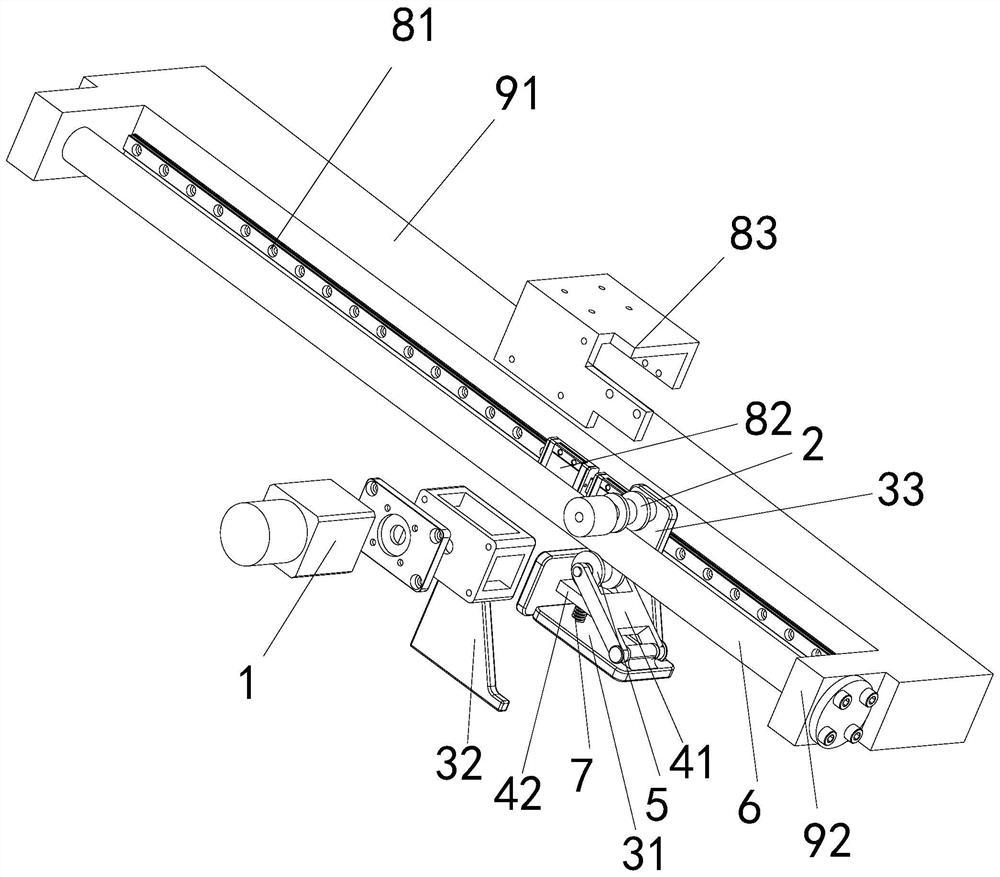
图3是图1中,单个随动分支机构的结构示意图;
图4是图1中,铰链机构的结构示意图;
图5是实施例2的单个可折展抓捕机械臂的结构示意图
图6是图5展开状态的示意图;
图7是图6抓捕状态的示意图;
图8是实施例3的多个可折展抓捕机械臂的整体结构示意图;
图9是图8的多个可折展抓捕机械臂的展开状态示意图;
图10是图9的多个可折展抓捕机械臂的抓捕状态示意图。
具体实施方式
实施例1
本实施例提供了一种变胞单元,如图1-4所示,包括:抓捕机构11、滑动分支12、转动分支13、伸缩分支机构14、铰链机构16。
其中,抓捕机构11包括两根相同的剪叉杆101、两根相同的连杆102,两根剪叉杆101通过转动副R1互相连接,形成剪叉机构;两根连杆102的底端分别通过转动副R2、转动副R3连接于两根剪叉杆101的顶端;该抓捕机构形成用于抓捕过程的抓捕面。转动副R2、转动副R3提供了该抓捕面进行抓捕运动的自由度。
两个相同的随动分支机构15,随动分支机构15包括滑动分支12、转动分支13;其中,滑动分支12包括第一滑动杆103、第二滑动杆104,第一滑动杆103、第二滑动杆104通过滑动副Pa1连接,第一滑动杆103和连杆102的顶端通过转动副R4连接。
转动分支13包括第一转动杆105、第二转动杆106、第三转动杆107、第四转动杆108;第一转动杆105、第二转动杆106通过转动副Ra1连接;第二转动杆106、第三转动杆107通过转动副Ra2连接;第三转动杆107、第四转动杆108通过转动副Ra3连接;第四转动杆通过转动副Ra4和第二滑动杆进行连接;第一转动杆通过转动副R5连接于剪叉杆101的底端。
铰链机构16将两个随动分支机15构进行连接,铰链机构16包括两个相同的叶片109,两个叶片109通过转动副RL1连接,两个叶片109通过转动副RL2分别连接于两个转动分支中的第三转动杆107。
在抓捕机构11的两端均设有伸缩分支机构14,用来连接相邻的变胞单元,每个伸缩分支机构14包括两根支杆110,两根支杆110的始端通过滑动副P1互相连接,其中一个变胞单元的剪叉杆101的底端通过转动副R5连接两根支杆110,另一个相邻的变胞单元的连杆102的顶端通过转动副R4连接两根支杆110。
由转动副R2和转动副R3的几何位置关系可以看出,当转动副R2和转动副R3的轴线不共线时,该抓捕机构有且只有一个自由度,即转动副R1所提供的折展自由度;当转动副R2和转动副R3轴线共线时,该抓捕机构将具备绕转动副R2(也即转动副R3)轴线旋转的自由度,即抓捕自由度。之后受转动副R4、转动副R5和P1所组成的平面运动的约束影响,R1转动副将会失效,即该机构有且只有一个自由度,即R2和R3所提供的抓捕自由度。
本实施例的单个随动分支机构共有四个转动副(Ra1、Ra2、Ra3和Ra4)和一个滑动副(Pa1),坐标系如图3所示,其中,转动副Ra1、转动副Ra2、转动副Ra3的运动螺旋为:
其中,li、mi、ni、ai、bi(i=1,2,3)为任意常数;
三个转动副Ra1、转动副Ra2、转动副Ra3的轴线不共线,且斜交于YOZ平面。
转动副Ra4的运动螺旋为:
$a4=(1 0 0 ; 0 a4 b4)
其中,a4,b4为任意常数;
转动副Ra4的轴线始终垂直于YOZ平面,即转动副Ra4的轴线沿着平行于X轴的方向。
滑动分支中,滑动副Pa1的运动螺旋为:
$a5=(0 0 0 ; 0 m5 n5)
其中,m5,n5为任意常数;
滑动副Pa1的轴线始终平行于YOZ平面。
结合四个转动副(Ra1、Ra2、Ra3和Ra4)和一个滑动副(Pa1)的运动螺旋,可以得到该随动分支单元的约束螺旋为:
即,该约束螺旋将会约束沿X轴移动的自由度,会产生沿X轴的约束力线矢,从而保证随动分支机构不会对抓捕机构产生额外的约束,不会影响整体机构的自由度。
如图3所示,为了避免随动分支机构在转动过程中,出现干涉等现象,第一滑动杆103采用折弯杆,第三转动杆107、第四转动杆108也采用折弯杆,以防止动作过程中的碰撞。
实施例2
本实施例提供了一种桁架式可折展抓捕机械臂,如图5-7所示,其包括四个相同的变胞单元201(此处的变胞单元201与实施例1中的变胞单元结构相同,此处不再赘述),相邻的变胞单元201通过伸缩分支机构202进行连接;该伸缩分支机构202为由四个转动副和两个滑动副组成的混合机构以串联的方式进行连接。在每一个变胞单元201的两个剪叉杆203经过折展运动后,该机械臂将会完全展开,此时,变胞单元201中的剪叉杆203和连杆204将进行翻转运动,即整个机械臂将进行抓捕运动。
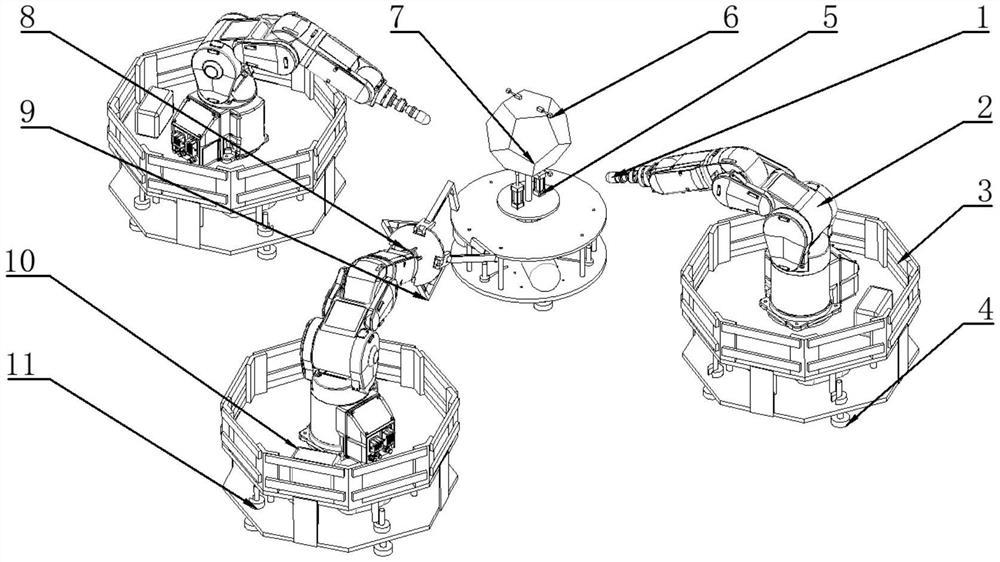
实施例3
本实施例提供了一种桁架式可折展抓捕机构,如图8-10所示,其包括底盘301、四个采用变胞单元302(此处的变胞单元302与实施例1中的变胞单元结构相同,此处不再赘述)形成的可折展抓捕机械臂303,四个该机械臂303以圆周阵列的方式排布在底盘301上。
该刚性可折展抓捕机构具有折叠、伸展、抓捕三个状态,在不同的情况下使用不同的状态,以完成太空中的抓捕任务。该刚性可折展抓捕机构折叠状态下放入运载火箭,然后在太空中展开后,即可进行对指定目标物的抓捕任务。
虽然本发明以较佳实施例揭露如上,但并非用以限定本发明实施的范围。任何本领域的普通技术人员,在不脱离本发明的发明范围内,当可作些许的改进,即凡是依照本发明所做的同等改进,应为本发明的范围所涵盖。
一种桁架式可折展抓捕变胞机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0