








专利摘要
本发明涉及一种用于城市轨道交通工务检测车定位的容错检测方法,包括以下步骤:1)工务检测车移动时,处理器根据接收到的光电编码器发送的脉冲数目及相位输出计算出工务检测车的行走距离与方向;2)工务检测车每经过一个信标时,处理器根据前向光电接近传感器和后向光电接近传感器中至少一个传感器输出的脉冲信号对工务检测车的行走距离进行校正。与现有技术相比,本发明具有检测可靠性强,不易对信标漏检等优点。
权利要求
1.一种用于城市轨道交通工务检测车定位的容错检测方法,其特征在于,该方法包括以下步骤:
1)工务检测车移动时,处理器根据接收到的光电编码器发送的脉冲数目及相位输出计算出工务检测车的行走距离与方向;
2)工务检测车每经过一个信标时,处理器根据前向光电接近传感器和后向光电接近传感器中至少一个传感器输出的脉冲信号对工务检测车的行走距离进行校正。
2.根据权利要求1所述的一种城市轨道交通检修小车定位信息处理方法,其特征在于,所述的步骤1)中的处理器根据接收到的光电编码器发送的的脉冲数目及相位输出计算出检修小车的行走距离与方向,具体包括以下步骤:
11)处理器等待光电编码器的脉冲输出,并判断轮子是否移动,如果判断为是则进行步骤12),否则重新等待光电编码器的脉冲输出;
12)采用K=1和K=-1来分别表示当前光电编码器输出脉冲指定的小车行走方向是前向还是后向,然后应用累加的办法计算检修小车的实际行走距离,同时计算出在每个信标检测到以后对已有行走距离进行校正后的行走距离数值。
3.根据权利要求2所述的一种城市轨道交通检修小车定位信息处理方法,其特征在于,所述的应用累加的办法计算检修小车的实际行走距离的计算公式为:X1=X2+(2π/1024)RK,X1为检修小车光电编码器当前输出脉冲时的绝对行走距离,X2为检修小车前一次脉冲输出时的绝对行走距离,R为轮子半径,K为当前脉冲状态,π为圆周率。
4.根据权利要求1所述的一种城市轨道交通检修小车定位信息处理方法,其特征在于,步骤2)中处理器根据前向光电接近传感器输出的脉冲信号进行校正的具体过程为:
21a)处理器判断前向光电接近传感器是否检测到信标后依次识别出对应脉冲的上、下沿,如果判断为是则进行下一步,否则重新等待前向光电接近传感器输出;
22a)处理器判断是否是对称上下沿,如果判断为是,则计算脉宽T1,并记录经过上、下沿的时刻X(up)和X(dp),否则重新等待前向光电接近传感器输出;
23a)获取前向的调节量ΔY=-ΔY1,式中ΔY1为下降沿输出时前向传感器与信标中心的距离;
24a)处理器判断上下沿位置up∶dp的值,若该值小于1,则说明检修小车是正向行驶经过该信标,若该值大于1,则说明检修小车是反向行驶经过该信标;
25a)对检修小车经过的信标进行计数,正向经过信标记为1,反向经过信标记为-1,同时记录从任务开始时的位置经过第一个信标位置时的行走距离;
26a)当检修小车正向经过其它信标时刻,采用校正公式对步骤1)中已计算的检修小车的行走距离进行校正;
步骤2)中处理器根据后向光电接近传感器输出的脉冲信号进行校正的具体过程为:
21b)处理器判断后向光电接近传感器是否检测到信标后依次识别出对应脉冲的上、下沿,如果判断为是则进行步骤24),否则重新等待后向光电接近传感器输出;
22b)处理器判断是否是对称上下沿,如果判断为是,则计算脉宽T2,并记录经过上、下沿的时刻X(uq)和X(dq),否则重新等待后向光电接近传感器输出;
23b)获取前向的调节量ΔY=ΔY2+T2,式中ΔY2为上降沿输出时后向传感器与信标中心的距离;
24b)处理器判断上下沿位置uq∶dq的值,若该值小于1,则说明检修小车是正向行驶经过该信标,若该值大于1,则说明检修小车是反向行驶经过该信标;
25b)对检修小车经过的信标进行计数,正向经过信标记为1,反向经过信标记为-1,同时记录从任务开始时的位置经过第一个信标位置时的行走距离;
26b)当检修小车正向经过其它信标时刻,采用校正公式对步骤1)中已计算的检修小车的行走距离进行校正。
5.根据权利要求4所述的一种城市轨道交通检修小车定位信息处理方法,其特征在于,当其中一个光电接近传感器首先输出脉冲信号时,处理器将抑制另一个光电接近传感器的输出。
6.根据权利要求4所述的一种城市轨道交通检修小车定位信息处理方法,其特征在于,所述的步骤26a和步骤26b中的校正公式包括:B(m)=|(X-B(1)-ΔY)+0.5C)|+B(1)和X=B(m)+ΔY,式中B(m)为第m次经过信标时对该信标离开任务起始点位置的标准距离计算,X以这个位置为校正基点继续计算到达下一个信标之前的绝对行走距离,B(1)为任务起始点位置与第一个信标之间的距离,由于小车是在通过信标之后才完成信息处理故有ΔY为信标中心调整量,C为相邻信标的规定距离,“||”为数学取整运算。
说明书
技术领域
本发明涉及一种轨道交通检测方法,尤其是涉及一种用于城市轨道交通工务检测车定位的容错检测方法。
背景技术
城市轨道交通在列车深夜停运期间安排有沿线设备维护和检修工作,目前通常是由人工徒步行走和人力背载工具到达目的地。设计和制作轻便型的轨道检修小车可以解决此需求,但是在具体应用环境下还需要特别考虑到:小车可能会随意地前向和后向行走、以及小车车轮可能会打滑和发生空转等情况发生时带来的计算误差,这需要通过适当的数字信息处理来解决。
已有发明申请专利《一种城市轨道交通检修小车定位系统》提出了可以获知当前车辆位置信息的定位系统设计方案,其基本思想是利用车载光电编码器的输出脉冲来计算行走距离、并应用光电接近传感器对里程信标检测来矫正行走距离的计算。另一发明申请专利《一种城市轨道交通检修小车定位信息处理方法》对这个定位系统的实时信息处理算法给予了详细描述。在由这二个发明申请专利描述的城市轨道交通工务检测小车的定位系统中,对里程信标的检测是通过车载二个光电接近传感器同时对截面为三角形信标的二个斜平面的红外光发射与反射光接受来实现的。在实际工程现场,由于里程信标二个斜平面分别迎对列车行进的前后方向,如安装在始终单向行走的轨道中间时,只有信标迎对开来列车的斜平面容易反射红外光线而被检测到,信标另一个背向开来列车的斜平面由于长期锈尘沾污不容易反射红外光线而被实际检测到。在这二个发明申请专利中规定的对信标二个斜平面的检测处理是“与”的关系,也就是只有对信标的二个斜平面都检测到了,才算是信标检测到了。这样虽然使得检测处理的可靠性增加,但是在某些特定场合也使得对信标的检测有漏检的可能。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种检测可靠性强,不易对信标漏检的用于城市轨道交通工务检测车定位的容错检测方法。
本发明的目的可以通过以下技术方案来实现:
一种用于城市轨道交通工务检测车定位的容错检测方法,该方法包括以下步骤:
1)工务检测车移动时,处理器根据接收到的光电编码器发送的脉冲数目及相位输出计算出工务检测车的行走距离与方向;
2)工务检测车每经过一个信标时,处理器根据前向光电接近传感器和后向光电接近传感器中至少一个传感器输出的脉冲信号对工务检测车的行走距离进行校正。
所述的步骤1)中的处理器根据接收到的光电编码器发送的的脉冲数目及相位输出计算出检修小车的行走距离与方向,具体包括以下步骤:
11)处理器等待光电编码器的脉冲输出,并判断轮子是否移动,如果判断为是则进行步骤12),否则重新等待光电编码器的脉冲输出;
12)采用K=1和K=-1来分别表示当前光电编码器输出脉冲指定的小车行走方向是前向还是后向,然后应用累加的办法计算检修小车的实际行走距离,同时计算出在每个信标检测到以后对已有行走距离校正后的行走距离数值。
所述的应用累加的办法计算检修小车的实际行走距离的计算公式为:X1=X2+(2π/1024)RK,X1为检修小车光电编码器当前输出脉冲时的绝对行走距离,X2为检修小车前一次脉冲输出时的绝对行走距离,R为轮子半径,K为当前脉冲状态,π为圆周率。
步骤2)中处理器根据前向光电接近传感器输出的脉冲信号进行校正的具体过程为:
21a)处理器判断前向光电接近传感器是否检测到信标后依次识别出对应脉冲的上、下沿,如果判断为是则进行下一步,否则重新等待前向光电接近传感器输出;
22a)处理器判断是否是对称上下沿,如果判断为是,则计算脉宽T1,并记录经过上、下沿的时刻X(up)和X(dp),否则重新等待前向光电接近传感器输出;
23a)获取前向的调节量ΔY=-ΔY1,式中ΔY1为下降沿输出时前向传感器与信标中心的距离;
24a)处理器判断上下沿位置up∶dp的值,若该值小于1,则说明检修小车是正向行驶经过该信标,若该值大于1,则说明检修小车是反向行驶经过该信标;
25a)对检修小车经过的信标进行计数,正向经过信标记为1,反向经过信标记为-1,同时记录从任务开始的位置经过第一个信标位置时所行走的距离;
26a)当检修小车正向经过其它信标时刻,采用校正公式对步骤1)中已计算的检修小车的行走距离进行校正;
步骤2)中处理器根据后向光电接近传感器输出的脉冲信号进行校正的具体过程为:
21b)处理器判断后向光电接近传感器是否检测到信标后依次识别出对应脉冲的上、下沿,如果判断为是则进行步骤24),否则重新等待后向光电接近传感器输出;
22b)处理器判断是否是对称上下沿,如果判断为是,则计算脉宽T2,并记录经过上、下沿的时刻X(uq)和X(dq),否则重新等待后向光电接近传感器输出;
23b)获取前向的调节量ΔY=ΔY2+T2,式中ΔY2为上升沿输出时后向传感器与信标中心的距离;
24b)处理器判断上下沿位置uq∶dq的值,若该值小于1,则说明检修小车是正向行驶经过该信标,若该值大于1,则说明检修小车是反向行驶经过该信标;
25b)对检修小车经过的信标进行计数,正向经过信标记为1,反向经过信标记为-1,同时记录从任务开始的位置经过第一个信标位置时所行走的距离;
26b)当检修小车正向经过其它信标时刻,采用校正公式对步骤1)中已计算的检修小车的行走距离进行校正。
ΔY1和ΔY2可以通过多次试验获得。
当其中一个光电接近传感器首先输出脉冲信号时,处理器将抑制另一个光电接近传感器的输出。
所述的步骤26a和步骤26b中的校正公式包括:B(m)=|(X-B(1)-ΔY)+0.5C)|+B(1)和X=B(m)+ΔY,式中B(m)为第m次经过信标时对该信标离开任务起始点位置的标准距离计算,X以这个位置为校正基点继续计算到达下一个信标之前的绝对行走距离,B(1)为任务起始点位置与第一个信标之间的距离,由于小车是在通过信标之后才完成信息处理故有ΔY为信标中心调整量,C为相邻信标的规定距离,“||”为数学取整运算。
与现有技术相比,本发明具有以下优点:
1、能够测出小车精度为2Rπ/1024的行走距离(其中R为轮子半径,π=3.14);能够测出小车在任意时刻的行走方向,并可综合计算出实际移动距离;因任何原因无法检测到信标使得失去距离数据校正的执行,也不会影响或中断对当前距离信息的继续估算;一旦检测到信标,系统将在该时刻起以该信标位置为参考,自动检查和校正距离数据。
只要光电接近传感器检测到了任一信标斜平面、或者也可以是同时检测到了二个斜平面,都认为是检测到了信标,这样对二个斜平面的反光检测判决是基于“或”的关系,在某些特定场合就可以大大减小原“与”检测关系的漏检可能性。
附图说明
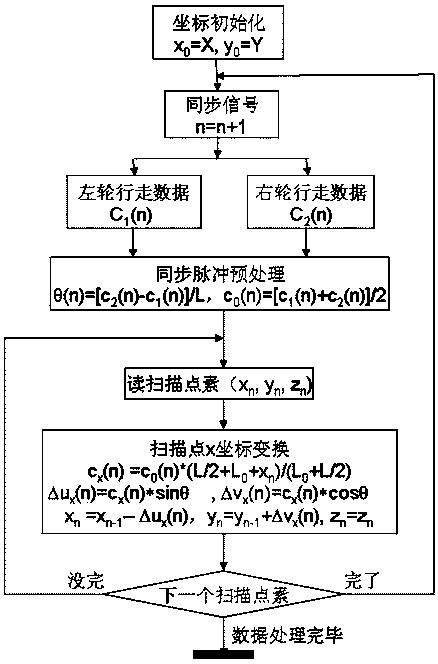
图1为处理器根据光电编码器发送的信息计算出检修小车的行走距离的流程图;
图2为处理器根据前、后向传感器检测到的信标信号对检修小车的行走距离进行校正的流程图;
图3为信标检测后的距离补偿分析图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例
一种用于城市轨道交通工务检测车定位的容错检测方法,本方法的原理为:首先,光电编码器内轴每转动一圈输出1024个脉冲信号,通过对脉冲数目计数估算行走距离。再利用光电编码器的相位输出来判断行走方向,并综合计算实际行走距离。然后,对光电接近传感器检测到信标后输出脉冲的识别(包括宽度和上下沿),并再对光电接近传感器脉冲识别后对信标中心位置的估算。最后,信标中心位置确定后对当前时刻起的正向行走距离进行数据校正。
该方法包括以下两个步骤:
第一步:检修小车移动时,处理器根据接收到的光电编码器发送的的脉冲数目及相位输出计算出检修小车的行走距离。如图1所示,为光电编码器的检测算法,其中关键技术是采用K=1和K=-1来分别表示收到的脉冲指定小车行走方向是前向还是后向,然后应用累加的办法计算实际行走距离。其中X是自始自终的全程行走距离,小车每经过一个信标时X都会被校正一次,U是在每个信标检测到以后重新开始的行走距离。光电编码器是异步工作,只有在轮轴转动时才会有脉冲输出变化并触发对K的计数和更新;当轮轴不转动时的脉冲输出信号保留前一个状态。具体包括以下两个分步骤:
步骤11)处理器等待光电编码器的脉冲输出,并判断轮子是否移动,如果判断为是则进行步骤12),否则重新等待光电编码器的脉冲输出;
步骤12)采用K=1和K=-1来分别表示收到的脉冲指定小车行走方向是前向还是后向,然后应用累加的办法计算检修小车的实际行走距离,同时计算出在每个信标检测到以后重新开始的行走距离值。累加的办法具体为:X1=X2+(2π/1024)RK,X1为检修小车光电编码器当前输出脉冲时的绝对行走距离,X2为检修小车前一次脉冲输出时的绝对行走距离,R为轮子半径,K为当前脉冲状态,π为圆周率。
第二步:检修小车正向每经过一个信标时处理器根据前向光电接近传感器和后向光电接近传感器中至少一个传感器输出的脉冲信号对工务检测车的行走距离进行校正,为了防止传感器输出干扰,本实施例中当其中一个光电接近传感器首先输出脉冲信号时,处理器将抑制另一个光电接近传感器的输出。其中,
根据前向光电接近传感器输出的脉冲信号进行校正的具体过程为:
21a)处理器判断前向光电接近传感器是否检测到信标后依次识别出对应脉冲的上、下沿,如果判断为是则进行下一步,否则重新等待前向光电接近传感器输出;
22a)处理器判断是否是对称上下沿,如果判断为是,则计算脉宽T1,并记录经过上、下沿的时刻X(up)和X(dp),否则重新等待前向光电接近传感器输出;
23a)获取前向的调节量ΔY=-ΔY1,式中ΔY1为下降沿输出时前向传感器与信标中心的距离;
24a)处理器判断上下沿位置up∶dp的值,若该值小于1,则说明检修小车是正向行驶经过该信标,若该值大于1,则说明检修小车是反向行驶经过该信标;
25a)对检修小车经过的信标进行计数,正向经过信标记为1,反向经过信标记为-1,同时记录从任务开始的位置经过第一个信标位置时所行走的距离;
26a)当检修小车正向经过其它信标时刻,采用校正公式对步骤1)中已计算的检修小车的行走距离进行校正;
根据后向光电接近传感器输出的脉冲信号进行校正的具体过程为:
21b)处理器判断后向光电接近传感器是否检测到信标后依次识别出对应脉冲的上、下沿,如果判断为是则进行步骤24),否则重新等待后向光电接近传感器输出;
22b)处理器判断是否是对称上下沿,如果判断为是,则计算脉宽T2,并记录经过上、下沿的时刻X(uq)和X(dq),否则重新等待后向光电接近传感器输出;
23b)获取前向的调节量ΔY=ΔY2+T2,式中ΔY2为上升沿输出时后向传感器与信标中心的距离;
24b)处理器判断上下沿位置uq∶dq的值,若该值小于1,则说明检修小车是正向行驶经过该信标,若该值大于1,则说明检修小车是反向行驶经过该信标;
25b)对检修小车经过的信标进行计数,正向经过信标记为1,反向经过信标记为-1,同时记录从任务开始的位置经过第一个信标位置时所行走的距离;
26b)当检修小车正向经过其它信标时刻,采用校正公式对步骤1)中已计算的检修小车的行走距离进行校正。
步骤26a和步骤26b中的校正公式包括:B(m)=|(X-B(1)-ΔY)+0.5C)|+B(1)和X=B(m)+ΔY,式中B(m)为第m次经过信标时对该信标离开任务起始点位置的标准距离计算,X以这个位置为校正基点继续计算到达下一个信标之前的绝对行走距离,B(1)为任务起始点位置与第一个信标之间的距离,由于小车是在通过信标之后才完成信息处理故有ΔY为信标中心调整量,C为相邻信标的规定距离,“||”为数学取整运算。
图3为信标检测后的距离补偿分析图,其中p1、p2、p3为正向传感器移动位置;q1、q2、q3为反向传感器移动位置;H为光电接近传感器离地面枕木的高度;h为光电接近传感器离信标的高度;w为信标截面底边宽度;b为信标截面反光面棱长;α为信标截面顶角的角度;β=α/2为传感器安装角;T1和T2为脉冲等效距离宽度;ΔY1和ΔY2为脉冲检测后补偿值由实验确定;L1:p2为垂线离信标反射面中部距离;ΔY/2为信标中心位置前调量与后调量的均值;L2:p2为在信标上射线点离信标中心距离;L1=[H-(w/2)/tg(α/2)/2]/tg(α/2);L2=w/4;x1=x2=[H-(w/2)/tg(α/2)]/tg(α/2);y1=y2=H/tg(α/2);
信息处理过程的流程如图2所示,其中用数字圆圈标注部分的进一步说明如下:
①指定的2个虚线框图为2个光电接近传感器的检测算法,关键是要准确检测到完整的信标输出脉冲,相应办法采用了先确定脉冲上沿、再确定脉冲下沿、最后确认这个下沿是“合法”的(是正确的下沿而不是中途改变方向后退时遇到的原上沿)。在完整脉冲测到后,计算出该脉冲的上下沿时刻、脉宽和离信标中心位置距离的补偿值。
②获取前向或者后向的调整量,由于两个光电接近传感器的检测基于“或”关系,只要其中一个光电接近传感器的输出信号,即判定为检测到信标,使得信标检测的容错率大大提高。
③需要分析小车行走方向:如果脉冲上升沿检测结束时间早于下降沿检测时间,则说明小车是前向的,否则是后向。
④根据前向或者后向的调节量以及输出的脉宽来估算信标位置的中心。
⑤记录经过的信标个数。
⑥记忆经过第一个信标位置时的距离。小车可以在轨道的任一点开始工作,但是第一个信标不作为标准参考点来用于对距离数据X进行校正。
⑦当正向经过其它信标位置时刻对已计算距离数据X的校正,校正是针对由光电编码器输出脉冲计算的绝对距离,其中考虑了当前信标中心调节量,但是不考虑经过第一个信标前行走距离的数值范围。
⑧通过最近信标后对当前时刻任意位置进行校正。
⑨如果遇到正向行走途中的反向后退,则不作任何距离补偿调整和校正,仅仅对经过的信标数进行(减法)计算。
一种用于城市轨道交通工务检测车定位的容错检测方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0