







专利摘要
本实用新型公开了一种新型后轮主动转向装置,包括:后桥副车架;以及运动转换机构,其设置在所述后桥副车架的横梁上部;两个转向横拉杆,其一端分别连接所述运动转换机构的两端;两个车轮转向节臂,其一端分别与所述转向横拉杆的另一端连接,所述车轮转向节臂的另一端分别连接两个后轮;其中,所述运动转换机构包括:运动转换机构壳体,其具有第一容纳腔;曲柄,其为偏心轮,在偏心点处沿轴向开设通孔;曲柄轴,其一端在所述通孔处固定连接;滑块,其可滑动的设置在所述第一容纳腔内,并且所述滑块具有第二容纳腔,所述曲柄可滑动的设置在所述第二容纳腔内。
权利要求
1.一种新型后轮主动转向装置,其特征在于,包括:
后桥副车架;以及
运动转换机构,其设置在所述后桥副车架的横梁上部;
两个转向横拉杆,其一端分别连接所述运动转换机构的两端;
两个车轮转向节臂,其一端分别与所述转向横拉杆的另一端连接,所述车轮转向节臂的另一端分别连接两个后轮;
其中,所述运动转换机构包括:
运动转换机构壳体,其具有第一容纳腔;
曲柄,其为偏心轮,在偏心点处沿轴向开设通孔;
曲柄轴,其一端在所述通孔处固定连接;
滑块,其可滑动的设置在所述第一容纳腔内,并且所述滑块具有第二容纳腔,所述曲柄可滑动的设置在所述第二容纳腔内。
2.如权利要求1所述的新型后轮主动转向装置,其特征在于,还包括:
转向电机,其固定在所述后桥副车架上,且所述转向电机的轴线与汽车纵轴线同轴或平行布置,在所述转向电机的输出轴一侧具有壳体。
3.如权利要求2所述的新型后轮主动转向装置,其特征在于,还包括:
减速机构壳体,其一端与所述转向电机输出轴一侧的壳体连接,另一端与所述运动转换机构壳体连接。
4.如权利要求3所述的新型后轮主动转向装置,其特征在于,还包括:
偏心输入轴,其包括第一轴、第二轴、第三轴和第四轴,所述第一轴与所述转向电机连接,所述第四轴可转动的支承在输出轴内部;
第一外齿轮,其通过第一外齿轮轴承固定在所述第二轴上;
第二外齿轮,其通过第二外齿轮轴承固定在所述第三轴上;
内齿圈,其固定在所述减速机构壳体上,所述内齿圈与所述第一外齿轮和所述第二外齿轮啮合传动;
多个销轴,其一端限定于第一外齿轮、第二外齿轮上圆周分布的轴向通孔中。
5.如权利要求4所述的新型后轮主动转向装置,其特征在于,所述输出轴一端与所述销轴的另一端连接,所述输出轴的另一端与所述曲柄轴的输入端连接。
6.如权利要求1所述的新型后轮主动转向装置,其特征在于,所述滑块还包括:
限位框,其内部空间为所述第二容纳腔;
两个滑块杆,其一端对称连接所述限位框的两侧,另一端分别连接该侧所述转向横拉杆。
7.如权利要求5中所述的新型后轮主动转向装置,其特征在于,所述运动转换机构还包括:
曲柄轴输入端轴承,其外表面与所述减速机构壳体内表面接触;
曲柄轴输出端轴承,其外表面与所述转换机构壳体内表面接触;
曲柄轴套筒,其端面分别与所述曲柄轴输入端轴承内圈和所述曲柄轴输出端轴承内圈的内端面相接触。
说明书
技术领域
本实用新型涉及汽车转向安全领域,具体涉及一种新型后轮主动转向装置。
背景技术
汽车自从诞生以来,其主要转向方式一直是以前轮转向为主流。当今,一方面,汽车的高速化对行驶安全稳定性要求越来越高;另一方面,城市道路空间狭小对汽车转向机动灵活性也要求越来越高,传统的前轮转向已经渐渐不能满足人们对汽车的要求。传统的前轮转向汽车由驾驶员操纵转向盘经转向梯形机构控制前轮负责方向转变,后轮方向固定、并不转向。这种转向方式虽然有各种助力转向方式的协助,其依旧具有在狭窄道路大曲率转向操作时迟钝不灵活、转向时间长、转向盘频繁运动、转弯半径较大、驾驶员操作负担重,且在高速行驶失稳时,制动系统负担重、动力性丢失、驾驶员操作频繁等缺点。后轮转向技术具有非常明显的优势,使汽车在低速行驶状态下具有抑制转向不足特性,提高转向横摆增益,改善在狭小空间曲率行驶的灵活性;在高速行驶时抑制过多转向特性,降低转向横摆增益,改善高速行驶的稳定性。
近年来,各国陆续出现不同的后轮主动转向技术。主要采用以下三种方式:机械式后轮转向系统、电子液压式后轮转向系统、电子式后轮转向系统。其中,机械式通过机械结构将前轮转向机构和后轮转向齿轮箱连接在一起,使前轮主动转向的同时后轮实现主动转向;液动式通过液压动力缸,对后轮施加转向力;而电子式主动转向不通过液压装置传递力和扭矩,直接通过ECU控制电机输出转矩,响应迅速、结构简单,适用于小型汽车的转向控制。
目前已经有部分高端车型装备了后轮主动转向技术,如凯迪拉克在CT6中使用ARS后轮主动转向,采用了伺服电机配合五连杆悬挂实现最大3.5°的后轮转向角。采埃孚(ZF)公司研发出的AKC后轮主动转向装置已经实现量产,直流无刷电机驱动连杆机构改变后轮前束值以提供最大6°的转角,在保时捷911Turbo和911GT3上配备了该系统的双执行器版本,在最新的保时捷Panamera上配备了该系统的中央执行器版。宝马公司也在新7系轿车中装备了Intergral主动转向,其采用的为电机驱动螺母,由螺杆产生轴向位移以实现最大3°的后轮转向角。新奥迪A8也采用电机驱动的后轮主动转向机构。
可以看出现阶段由于电子式主动后轮转向展现出了较大的性能、成本和维护优势,使其更具市场竞争力,而各类电子式主动后轮转向大部分都采用了直线电机作为执行机构。本实用新型则提供一种有别于上述系统的一种新型的后轮主动转向装置。
实用新型内容
本实用新型的一个目的是设计开发了一种新型后轮转向装置,本实用新型装置整体安装于汽车后桥副车架上,直接连接与汽车左右后车轮,其结构小巧,灵敏度高,为汽车转向提供更为精准灵活的方式。
本实用新型提供的技术方案为:
一种新型后轮主动转向装置,包括:
后桥副车架;以及
运动转换机构,其设置在所述后桥副车架的横梁上部;
两个转向横拉杆,其一端分别连接所述运动转换机构的两端;
两个车轮转向节臂,其一端分别与所述转向横拉杆的另一端连接,所述车轮转向节臂的另一端分别连接两个后轮;
其中,所述运动转换机构包括:
运动转换机构壳体,其具有第一容纳腔;
曲柄,其为偏心轮,在偏心点处沿轴向开设通孔;
曲柄轴,其一端在所述通孔处固定连接;
滑块,其可滑动的设置在所述第一容纳腔内,并且所述滑块具有第二容纳腔,所述曲柄可滑动的设置在所述第二容纳腔内。
优选的是,还包括:
转向电机,其固定在所述后桥副车架上,且所述转向电机的轴线与汽车纵轴线同轴或平行布置,在所述转向电机的输出轴一侧具有壳体。
优选的是,还包括:
减速机构壳体,其一端与所述转向电机输出轴一侧的壳体连接,另一端与所述运动转换机构壳体连接;
优选的是,还包括:
偏心输入轴,其包括第一轴、第二轴、第三轴和第四轴,所述第一轴与所述转向电机连接,所述第四轴可转动的支承在输出轴内部;
第一外齿轮,其通过第一外齿轮轴承固定在所述第二轴上;
第二外齿轮,其通过第二外齿轮轴承固定在所述第三轴上;
内齿圈,其固定在所述减速机构壳体上,所述内齿圈与所述第一外齿轮和所述第二外齿轮啮合传动;
多个销轴,其一端限定于第一外齿轮、第二外齿轮上圆周分布的轴向通孔中;
优选的是,所述输出轴一端与所述销轴的另一端连接,所述输出轴的另一端与所述曲柄轴的输入端连接。
优选的是,所述滑块还包括:
限位框,其内部空间为所述第二容纳腔;
两个滑块杆,其一端对称连接所述限位框的两侧,另一端分别连接该侧所述转向横拉杆。
优选的是,所述运动转换机构还包括:
曲柄轴输入端轴承,其外表面与所述减速机构壳体内表面接触;
曲柄轴输出端轴承,其外表面与所述转换机构壳体内表面接触;
曲柄轴套筒,其端面分别与所述曲柄轴输入端轴承内圈和所述曲柄轴输出端轴承内圈的内端面相接触。
本实用新型与现有技术相比较所具有的有益效果:
本实用新型提供的新型后轮转向装置,整体安装于汽车后桥副车架上,直接连接与汽车左右后车轮,其结构小巧,灵敏度高,在汽车前轮转向的基础上,为汽车后车轮转向提供更为精准灵活的方式。
附图说明
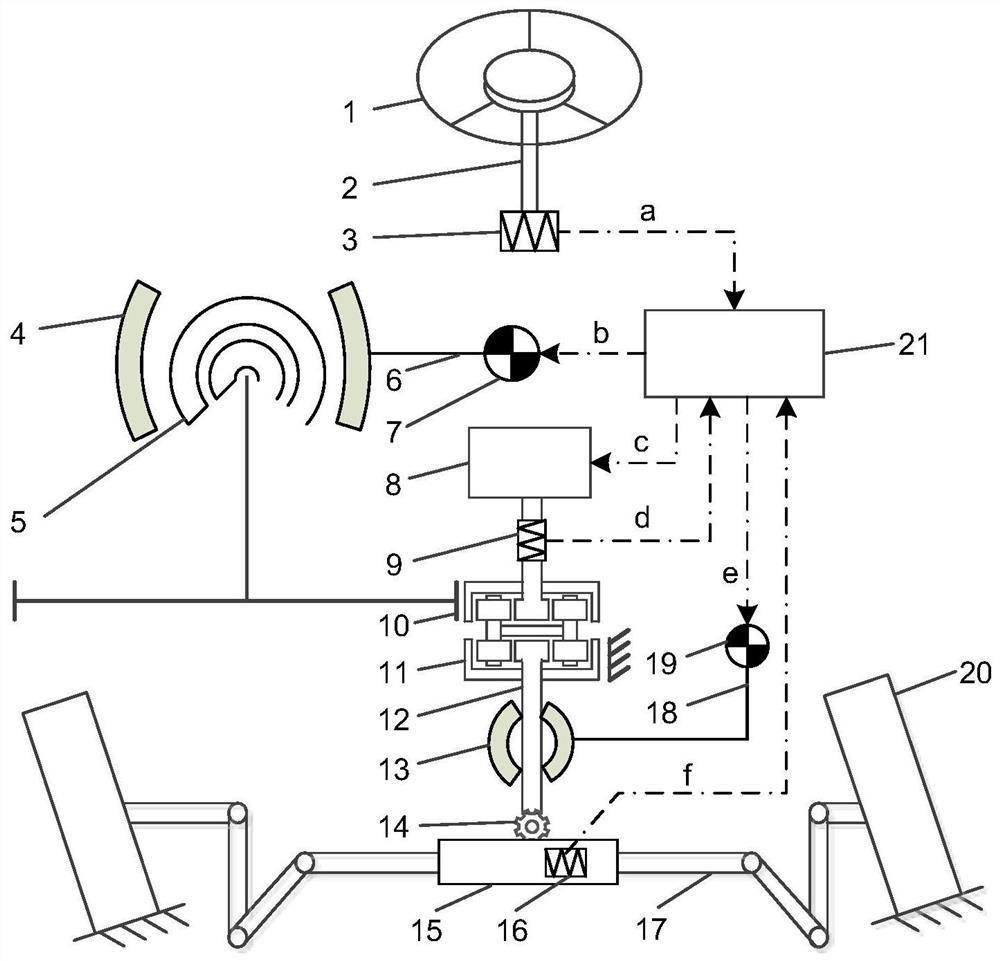
图1为本实用新型所述后轮主动转向装置在后桥上布置的总体结构示意图。
图2为本实用新型所述后轮主动转向装置执行器的结构示意图。
图3为本实用新型所述后轮主动转向装置运动转换机构的结构示意图。
图4为本实用新型所述后轮主动转向装置的滑块的结构示意图。
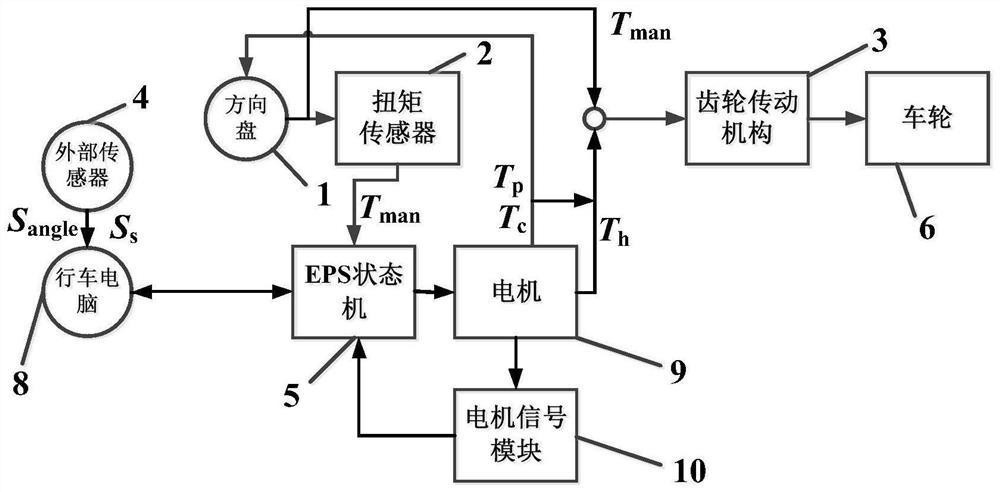
图5为本实用新型所述后轮主动转向装置的电气连接关系图。
图6为本实用新型所述后轮主动转向装置的控制器控制流程逻辑图。
具体实施方式
下面结合附图对本实用新型做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
如图1所示,为本实用新型所述的新型后轮主动转向装置在后桥上布置的总体结构图,本实用新型所述的新型后轮主动转向装置主要由转向电机200、电机减速机构300、运动转换机构400、左右转向横拉杆600、左右车轮转向节臂700、左右后轮100组成。其中,转向电机200水平固定在后桥副车架720上,且其轴线与汽车纵轴线同轴或平行布置。转向电机200与电机减速机构300沿其轴向依次布置,且转向电机200的输出轴260与电机减速机构300的输入端花键连接,并且由电机减速机构300达到减速增扭的功用。接着滑块型运动转换机构400布置在电机减速机构300的输出端,并且将转向电机200直至电机减速机构300输出的旋转运动转化为其输出端的平动。需要补充说明的是,一般仅前轮转向的汽车,一般在后悬架存在着一个后轮前束控制臂用来手动维修调整后轮的前束。而对于四轮转向的汽车,可以通过取消此后束控制臂与车架的连接、而改为与主动转向装置的运动转换机构的输出端球头销连接的方式来实时自动控制两侧后轮转向运动;同时由于后轮需同时满足跳动和转动两种运动的耦合,因此将原有控制臂与车轮之间的销轴连接改为转向横拉杆600与后轮转向节臂700间的球头销连接。为此,运动转换机构400的左右两个输出端分别通过球头销710与左右两侧转向横拉杆600连接,左右两侧的转向横拉杆600另一端通过球头销730再与左右后轮的各自转向节臂700连接,从而将运动转换机构400的两端输出的同向平动传递至对转向节臂的拖拽、直至带动左右车轮100完成转向偏转的运动。
如图2所示,为本实用新型所述后轮主动转向装置的执行器,本实用新型所述后轮主动转向装置的执行器主要包括转向电机200、电机减速机构300和运动转换机构400。
本实用新型所述转向电机200需满足反应灵敏、运行平稳、可堵转、可精确进行角位置控制、低速提供较大转矩的要求,且应具有较小的转动惯量和结构尺寸。优选的是选用配备失电制动器210的永磁直流无刷电机220组合,所述失电制动器210所具备的机械电子结构在电机转角达到目标角度值时,即电机断电瞬时,制动抱死电机转子,避免电机惯性力矩影响转向灵敏性,确保转角执行准确的同时,可实现电动机的断电卸载,避免额外电机功耗和电机堵转造成的可能的电机失效,并通过机械方式确保后轮锁死固定、以抵抗外界(地面侧向力等)干扰导致的无故车轮偏转。
如图2所示,所述失电制动器210和无刷直流电机220均受到控制器信号的控制,故需要连接信号线和外部直流电源输入,优选的是在两者外壳上分别设计制动器接线柱230和电机接线柱240;其中电机接线柱240由直流电源输入接线柱和电机内部安装的转角传感器的信号线接线柱组成。
本实用新型所述减速机构300优选的采用K-H-V型少齿差行星齿轮机构,内外齿轮齿数相差很少,具有传动比大、结构紧凑的优点,能在较小空间范围内完成大传动比传动。另外为了确保较小的轴向尺寸,其采用孔销式输出机构。且为了改善该孔销输出机构的受力状态和动平衡,采用两个互呈180°布置的行星轮(即两个外齿轮)结构。
如图1、2所示,该电机减速机构300主要包括偏心输入轴310、第一外齿轮轴承320、第一外齿轮330、第二外齿轮轴承321、第二外齿轮331、内齿圈340、止动销350、输出轴支承轴承360、放油螺塞371、输出轴380、6个销轴套筒390、6个销轴391、减速器后壳体373、减速器前壳体370、4个地脚螺钉510、壳体连接螺钉372、托盘500、密封圈313、输入轴壳体支承轴承311、输入轴轴间支承轴承312、轴承座314。
第一外齿轮330和第二外齿轮331与内齿圈340通过齿轮啮合实现大传动比传动,减速机构300的传动比i由公式(1)计算。
其中,z1为外齿轮齿数,z2为内齿圈340齿数;通常齿数差在1~4,本实用新型优选的选择齿数差(z2-z1)为1。
所述内齿圈340与减速器前壳体370止动销350予以固定,第一外齿轮330和第二外齿轮331圆周方向限定有轴向孔,且第一外齿轮330与第二外齿轮331以相对角度180°布置时,所设计的偏心距应满足使对应的所述孔保持同轴,所述孔内表面与销轴套筒390外表面紧密接触,所述销轴套筒390内表面限定有销轴391,销轴391向减速输出方向外伸。减速输出轴380始端限定有阶梯形盲孔且圆周方向沿轴向限定有通孔,所述通孔内表面与销轴391外伸端外表面紧密接触,将行星轮绕公转轴线的转矩输出给减速输出轴380。
如图2所示,为方便装配,减速机构300设计采用分体式结构,减速器前壳体370和后壳体373通过壳体连接螺钉372相连接;为减小壳体质量和尺寸,所述减速器后壳体373外表面设计为圆台状。在壳体内部,偏心输入轴310输入端端面限定有花键孔,与电机输出轴260花键连接。输入轴壳体支承轴承311外表面与减速器前壳体370内表面相接触,所述输入轴壳体支承轴承311内表面与输入轴310第一轴段外表面接触,由前壳体370内表面凸台与轴承座314共同限制轴承轴向定位,所述轴承座314与前壳体370通过螺钉连接,且为避免润滑介质在输入轴310的高速转动过程中渗出,在所述轴承座314内端定位轴肩处优选唇形密封圈313进行密封。偏心输入轴310第二、第三轴段外表面分别与第一外齿轮轴承320和第二外齿轮轴承321内表面接触,起到对第一外齿轮330和第二外齿轮331支承的作用并减小转动摩擦;偏心输入轴310第四轴段外表面与输入轴轴间支承轴承312内表面接触,轴间支承轴承312外表面与减速输出轴380所述端面盲孔内表面相接触;所述输出轴380外表面与输出轴支承轴承360内表面接触,轴承360则由减速器后壳体373内表面凸台实现对输出轴380的定位,间接地,实现对输入轴360的支承和定位。由于电机减速机构300内部主要的转动副和转速较高的零件均布置在前壳体370内,故需要在减速器前壳体370内采取润滑措施,在后壳体373左端面设计有放油螺塞371,便于加入或更换润滑介质。
如图1、2所示,本实用新型所述电机减速机构300的前壳体370下端设计有凸台,且设计有四个均匀分布的沉头孔,减速器前壳体370与托盘500通过地脚螺钉510相连接,所述托盘500通过焊接方式固连在副车架720上,从而完成减速机构300在副车架720上的定位。
另外,如图2所示,本实用新型所述转向电机200通过电机端面壳250的右端面法兰与电机减速机构300左端面法兰通过法兰螺栓270连接,所述法兰盘周向上的螺纹孔数量在4~8个,优选的选用6个。而带有外花键的电机输出轴260插入电机减速机构300左端输入轴花键孔内实现花键连接,将转向电机200输出的动力传递至电机减速机构300。
如图2、图3所示,本实用新型所述执行器布置形式决定了装置需要将绕平行于纵轴线的旋转运动变为横向的平移,本实用新型设计的运动转换机构400优选的采用偏心轮结构及整体式滑块。所述运动转换机构400主要包括曲柄410、曲柄轴420、限位螺钉430、密封圈440、滑块套筒450、曲柄轴套筒421、转换机构后壳470、转化机构前壳480、滑块490(包括限位框491、滑块杆492)、曲柄轴输入端轴承422、曲柄轴输出端轴承423、防尘罩451、卡箍452、通气孔483、连接螺钉481、螺栓482。如图3所示,该结构方案的主要优势在于偏心轮曲柄410可与滑块490内侧始终保持接触,往返转向时无冲击。
如图2所示,曲柄轴420的部分结构布置在减速器后壳体373内,曲柄轴输入端轴承422外表面与减速器后壳体373内表面凸台相接触,曲柄轴输出端轴承423外表面与转换机构前壳480内表面接触,在所述两轴承之间,设计有曲柄轴套筒421,其端面分别与所述曲柄轴输入端轴承422内圈和所述曲柄轴输出端轴承423内圈的内端面相接触实现轴承的轴向定位。所述曲柄轴420输入端外表面限定有外花键,减速机构输出轴380末端限定有相配合的花键孔,与曲柄轴420花键连接;类似的,曲柄轴420输出端外表面也限定有外花键。
如图3所示,曲柄410设计为偏心轮,偏心距e由设计的最大曲柄旋转角度δcm和单侧横向最大位移h所决定;如图1所示,转向梯形臂近似于一个曲柄滑块机构,而单侧横向最大位移即滑块行程h则与后轮最大转角δrm及转向梯形臂的结构参数(包括转向节臂旋转半径rb、转向横拉杆长度ld、中性位置时转向节臂与汽车y轴夹角θ0)有关;曲柄410的偏心距e计算方法如下(2)式、(3)式所示:
其中,最大曲柄旋转角度δcm应在0°~90°为宜,优选的设计为60°。
如图2所示,在曲柄410偏心点处沿轴向开通孔,所述通孔内表面限定有内花键,与所述曲柄轴420输出端外花键花键连接。曲柄轴420末端端面限定有螺纹孔,通过限位螺钉430限定曲柄410与曲柄轴420位置关系,防止曲柄410沿轴向脱出。
如图4所示,滑块490设计为整体式结构,包括限定曲柄410横向运动的封闭式的限位框491和传递横向力的滑块杆492,所述限位框491内部空间定义为第二容纳腔;所述限位框491和滑块杆492可通过铸造、锻压直接成形或通过焊接或铆接固连为整体结构;
如图3所示,运动转换机构前壳480与后壳470所限定内部空间为第一容纳腔,滑块490可滑动的设置在在第一容纳腔内;限位框491第二容纳腔内表面与曲柄410外表面接触且允许相对滑动,曲柄410的凸出端转向左侧时,所述限位框491左侧内表面受压,推动滑块490整体在第一容纳腔内向左侧水平移动,反之,限位框491右侧内表面受压,滑块490整体在第一容纳腔内向右侧水平移动。滑块杆492外表面限定于滑块套筒450内表面,所述滑块套筒450外表面限定于转换机构后壳体470和转换机构前壳体480内表面,而所述前壳体480、后壳体470通过如图1所示的在周布在壳体凸缘上的螺栓482相连接,从而所述套筒450可限定滑块490横向移动的方向且减小滑块杆492的滑动摩擦,增加使用寿命。本实用新型所述滑块490输出端向转向节臂700外伸,为防止灰尘、砂石等杂质进入转换机构400,在转换机构前壳体480、后壳体470、滑块490末端铣环槽,通过卡箍452将防尘罩451限定于滑块外伸端外表面。
如图2所示,而为了避免减速机构300中的润滑油溅入转换机构400中,在运动转换机构前壳体480左端面设计密封圈440实现阻隔作用,如图2所示。特别的,由于曲柄滑块结构处转速慢,为了减少维修难度、降低液力损失,在曲柄轴420与轴承间优选的,采用润滑脂润滑。
如图2所示,本实用新型在转换机构后壳体470上设计排气孔483,防止滑块沿横向快速位移时压缩空气而产生较大阻力,为避免气阻过大,优选的气孔直径为2~5mm。
如图2所示,转换机构前壳体480通过连接螺钉481与减速器后壳体373固连,所述连接螺钉数量在4~8个,优选的选用6个,从而本实用新型所设计的后轮主动转向装置的执行器三个主要部件(转向电机200、电机减速机构300和运动转换机构400)依次相连;而运动转换机构400中的曲柄轴420左端外花键插入减速机构400中的减速输出轴380右端的花键孔中,将减速机构300减速增扭后的动力传递给运动转换机构400;所述曲柄轴420右端的外花键则插入曲柄410偏心点处的花键孔中,将由减速机构300传递来的转动转化为拖拽左右转向横拉杆600的横向运动,完成执行器的功能。
需要注意的是,本实用新型所述后轮主动转向装置也可根据不同设计要求偏置在车架对称面的某一侧,或两侧分别配置独立的所述后轮主动转向装置;因此,布置位置的改变及采用双执行器方案均不认为是对本实用新型的创新。
本实用新型还提供一种新型后轮主动转向装置的工作过程,包括:
后轮主动转角δr由传感器测得的实时车速uc、前轮转角δf、横摆角速度r以及权重系数ξ1、ξ2共同决定,此时整车4WS模型的系统状态方程为:
其中,I为汽车绕z轴的转动惯量。
所述权重系数ξ1、ξ2应满足一定条件,优选的可取:ξ1=-1.0,而ξ2由下式计算得到:
其中:m为车重,a为前轴到质心距离,b为后轴到质心距离,l为轴距, 和 分别为前轴侧偏刚度、后轴侧偏刚度。
本实用新型所述后轮转角δr主要起辅助转向作用,为避免过大后轮转角引起过度的横摆及可能出现的机械运动干涉,后轮转角变化范围优选的,在-5°~+5°。若由控制律所计算得到的后轮理论转角值大于±5°,则实际转角按照最大(最小)阈值确定。
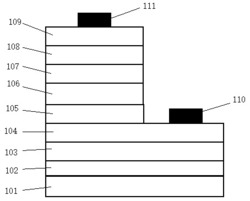
本实用新型所述线控后轮主动转向分为车速低速、高速两种情况下的工作过程,由于方向盘与前转向桥已经通过机械连接完成了特定的角传动特性的设计,若从转向盘或者前轮转向节通过机械结构进行后轮转角的分配,则有较大可能发生运动干涉或者需要进行较大幅度的结构再设计,相对来说工作比较繁琐;而所述线控后轮主动转向控制则极大程度避免了与新增转向要求对前轴及悬架的重新设计。如图5所示,本实用新型通过传感器、控制器、转向电机110之间的信号线进行转向指令的传递。
如图6所示,具体的,本实用新型所述后轮主动转向工作过程,即控制器逻辑流程为:
1)由转向盘转角传感器获得转向盘转角信号δs,通过信号线传入控制器,并由CAN总线获得转向时实时车速uc;
2)调用存储在控制器中的前轮转向系统的传动比is,计算实际前轮转角δf;
δf=isδs (8)
3)由控制器对车速范围进行判断:
若车速不高于60Km/h,则认为低速行驶,调用所述低速辅助转向控制律公式(4),计算出所需后轮转角δr大小;
若车速高于60Km/h,则认为中高速行驶,由CAN总线获取车辆横摆角速度信号r,调用所述高速辅助转向控制律公式(5)及权重系数等参数,计算出理论后轮转角δrt大小;
4)对计算得所需后轮转角进行阈值判断:
若所需后轮转角大于5°,则按最大值5°输出实际后轮转角值δr;
若所需后轮转角小于-5°,则反向最大值-5°输出实际后轮转角值δr;
若所需后轮转角在-5°~+5°,则按计算值δrt输出实际后轮转角值δr;
5)存储在控制器中的由公式(2)、(3)计算所得的曲柄410的偏心距e,用公式(9)、(10)计算出期望的曲柄410转角值δc
6)调用存储在控制器中的电机减速机构300的传动比i,由公式(11)计算出期望电机转角δmr:
δmr=i·δc (11)
7)由电机转角传感器实时读取电机输出轴转角位置信号δm,通过信号线传入控制器;
8)实时判定是否需要电机动作:
若电机转角与期望电机转角相等,则向直流电机220发送失电指令,向失电制动器210发送上电制动指令,防止误动;返回第1)步;
若电机转角与期望电机转角不等,则向直流电机220发送上电动作指令使其迅速动作,向失电制动器210发送失电指令使其不干预电机运转,并返回第7)步。
结合所述后轮主动转向装置结构及所述工作过程,本实用新型设计具体后轮主动转向装置工作方式如下:
1)由图5所示的各传感器及CAN总线实时获取车速、转向盘转角、横摆角速度、电机转角等信号;
2)后轮主动转向装置控制器读取第1)步所获得的各信号参数,按照本实用新型所述后轮主动转向工作过程及所述控制逻辑进行运算;
3)通过信号线指令转向电机220及失电制动器210进行动作;
4)转向电机输出轴260输出的动力通过花键副传递至电机减速机构输入轴310,利用外齿轮与内齿圈的偏心啮合,将偏心输入轴310的高速转动转化为外齿轮组绕支承轴承360所限定的输出轴线的低速公转;
5)外齿轮组带动销轴391进行绕减速输出轴380轴线的公转,销轴391驱动减速输出轴380转动,将外齿轮的低速公转转化为减速输出轴380的低速自转;
6)输出轴380末端通过花键带动曲柄轴420转动;
7)曲柄轴420与曲柄410由限位螺钉430保证相对位置,并通过花键传递动力,带动偏心轮曲柄410绕曲柄轴420轴线进行转动;
8)如附图3所示,滑块490可左右平移,当曲柄410的凸出端转至偏向曲柄轴420轴线右侧时,限位框491右侧内表面受压,推动滑块490整体在滑块套筒450中向右平动;当直流电机220反转时,曲柄410的凸出端偏向曲柄轴420轴线左侧,则曲柄410外表面压紧限位框491左侧内表面,推动滑块杆492左移;整体式滑块490则保证滑块490始终与曲柄410接触,保证往返运动能够反应灵敏无冲击;
9)滑块490整体向左平动则通过球头销710推动转向横拉杆600发生横向的平动,且允许绕球头销710的转动,带动转向节臂700绕主销进行转动。
10)由电机转角传感器实时测得直流电机220达到所需转角位置时,信号线停止供电,失电制动器210迅速反应锁止,保证电机快速停车、准确定位,即完成后轮主动转向动作。
尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。
一种新型后轮主动转向装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0