










专利摘要
本实用新型涉及机器人技术领域,具体是一种机器人移动用行走底板,包括安装板,安装板下侧设置有连接板,连接板与安装板之间设置有减震机构,连接板下侧设置有旋转块,旋转块与连接板之间设置有转向机构,旋转块内侧轴承连接设置有固定杆,固定杆左右两侧固定连接设置有脚轮,本实用新型,通过设置红外传感器和第一电机,使装置可以绕开障碍物继续行走,提升了装置行走过程的流畅性,通过设置减震机构,可以减少颠簸路面对装置的影响,利于提高装置移动过程的平稳性,通过设置限位板,可以提升滑块滑动过程的稳定性,通过设置定位杆和定位槽,可以避免安装板的侧滑,提升了安装板的稳定性。
权利要求
1.一种机器人移动用行走底板,包括安装板(1),其特征在于,所述安装板(1)下侧设置有连接板(2),所述连接板(2)与安装板(1)之间设置有减震机构,所述连接板(2)下侧设置有旋转块(15),所述旋转块(15)与连接板(2)之间设置有转向机构,所述旋转块(15)内侧轴承连接设置有固定杆(16),所述固定杆(16)左右两侧固定连接设置有脚轮(17),所述固定杆(16)下侧设置有与旋转块(15)螺栓连接的第二电机(18),所述第二电机(18)与固定杆(16)啮合连接。
2.根据权利要求1所述的机器人移动用行走底板,其特征在于,所述转向机构包括固定块(11)、第一电机(12)和转杆(14),所述固定块(11)固定连接设置在连接板(2)底部前后两侧,两侧所述固定块(11)底端均设置有凹槽,前侧所述凹槽内螺栓连接设置有第一电机(12),所述第一电机(12)与控制器连接,所述第一电机(12)输出端与转杆(14)连接,所述转杆(14)上固定连接设置有第一带轮(13),后侧所述凹槽内轴承连接设置有传动杆(19),所述传动杆(19)上固定连接设置有第二带轮,所述第一带轮(13)与第二带轮之间通过皮带(20)连接,所述转杆(14)和传动杆(19)底端均与旋转块(15)固定连接,所述连接板(2)前后左右四侧均固定连接设置有红外传感器(3),所述红外传感器(3)与控制器连接。
3.根据权利要求1所述的机器人移动用行走底板,其特征在于,所述减震机构包括滑槽(21)、滑块(10)和连接杆(8),所述滑槽(21)设置在连接板(2)顶端,所述滑槽(21)内滑动连接设置有滑块(10),所述滑块(10)顶端固定连接设置有连接块(9),所述连接块(9)上铆接设置有连接杆(8),所述连接杆(8)另一端与安装板(1)铰接,所述滑块(10)与连接板(2)之间固定连接设置有第二弹簧。
4.根据权利要求3所述的机器人移动用行走底板,其特征在于,所述滑槽(21)内侧设置有限位板(22),所述限位板(22)与滑块(10)滑动连接。
5.根据权利要求4所述的机器人移动用行走底板,其特征在于,所述安装板(1)底部固定连接设置有定位杆(4),所述定位杆(4)内侧滑动连接设置有伸缩杆(6),所述伸缩杆(6)与定位杆(4)之间固定连接设置有第一弹簧(7),所述连接板(2)顶端设置有与定位杆(4)相对应的定位槽(5)。
说明书
技术领域
本实用新型涉及机器人技术领域,具体是一种机器人移动用行走底板。
背景技术
机器人,能模仿人的某些活动的一种自动机械。一般能实现行走和操作生产工具等动作,可用在人所不能适应的环境下代替人工作。现代机器人都配装电子计算机,通过编排程序,能具有一定程度的人工智能,如识别语言和图像,并作出适当的反应等。机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
机器人移动时一般会将机器人安装在行走底板上,但目前的行走底板在遇到障碍物使只能暂停移动,无法绕开障碍物,导致机器人无法有效移动,因此,针对以上现状,迫切需要开发一种机器人移动用行走底板,以克服当前实际应用中的不足。
实用新型内容
本实用新型的目的在于提供一种机器人移动用行走底板,以解决上述背景技术中提出的问题。
为实现上述目的,本实用新型提供如下技术方案:
一种机器人移动用行走底板,包括安装板,所述安装板下侧设置有连接板,所述连接板与安装板之间设置有减震机构,所述连接板下侧设置有旋转块,所述旋转块与连接板之间设置有转向机构,所述旋转块内侧轴承连接设置有固定杆,所述固定杆左右两侧固定连接设置有脚轮,所述固定杆下侧设置有与旋转块螺栓连接的第二电机,所述第二电机与固定杆啮合连接。
作为本实用新型进一步的方案:所述转向机构包括固定块、第一电机和转杆,所述固定块固定连接设置在连接板底部前后两侧,两侧所述固定块底端均设置有凹槽,前侧所述凹槽内螺栓连接设置有第一电机,所述第一电机与控制器连接,所述第一电机输出端与转杆连接,所述转杆上固定连接设置有第一带轮,后侧所述凹槽内轴承连接设置有传动杆,所述传动杆上固定连接设置有第二带轮,所述第一带轮与第二带轮之间通过皮带连接,所述转杆和传动杆底端均与旋转块固定连接,所述连接板前后左右四侧均固定连接设置有红外传感器,所述红外传感器与控制器连接。
作为本实用新型进一步的方案:所述减震机构包括滑槽、滑块和连接杆,所述滑槽设置在连接板顶端,所述滑槽内滑动连接设置有滑块,所述滑块顶端固定连接设置有连接块,所述连接块上铆接设置有连接杆,所述连接杆另一端与安装板铰接,所述滑块与连接板之间固定连接设置有第二弹簧。
作为本实用新型进一步的方案:所述滑槽内侧设置有限位板,所述限位板与滑块滑动连接。
作为本实用新型进一步的方案:所述安装板底部固定连接设置有定位杆,所述定位杆内侧滑动连接设置有伸缩杆,所述伸缩杆与定位杆之间固定连接设置有第一弹簧,所述连接板顶端设置有与定位杆相对应的定位槽。
与现有技术相比,本实用新型的有益效果是:
1.通过设置红外传感器和第一电机,可以检测装置行走路线前侧是否有障碍物,当有障碍物时,通过第一电机实现脚轮的旋转,使装置继续前进,使装置可以绕开障碍物继续行走,提升了装置行走过程的流畅性;
2.通过设置减震机构,可以减少颠簸路面对装置的影响,利于提高装置移动过程的平稳性,通过设置限位板,可以提升滑块滑动过程的稳定性;
3.通过设置定位杆和定位槽,可以避免安装板的侧滑,提升了安装板的稳定性。
附图说明
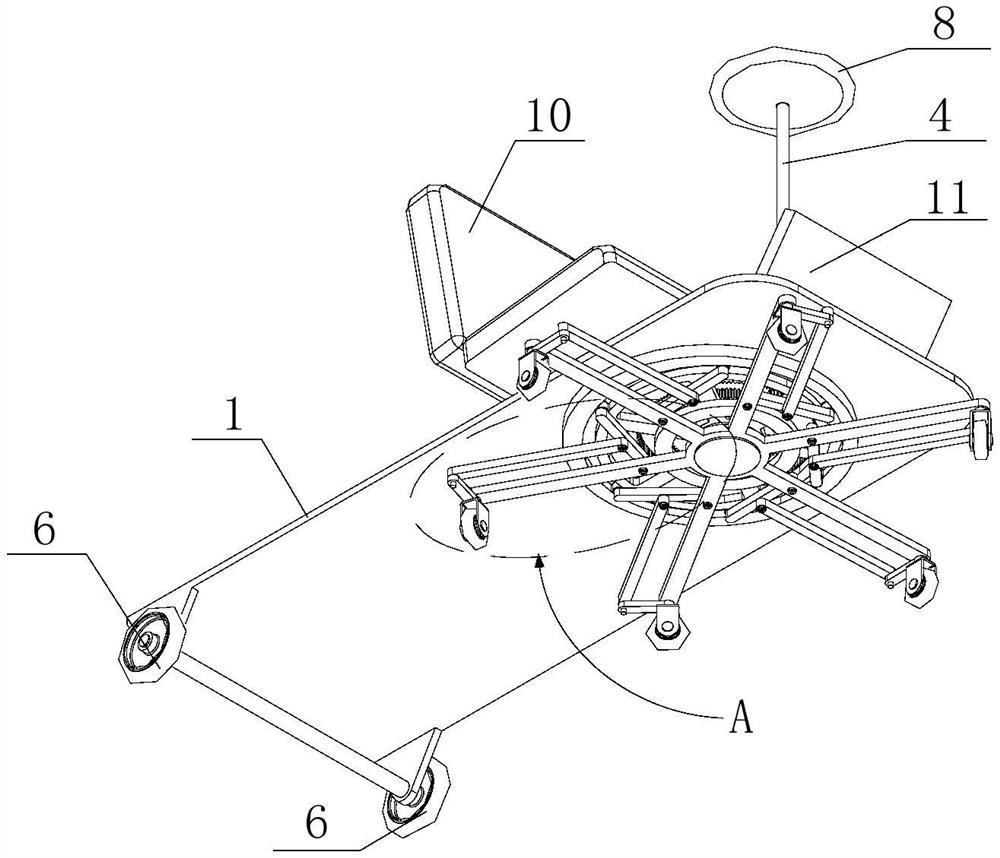
图1为机器人移动用行走底板的结构示意图;
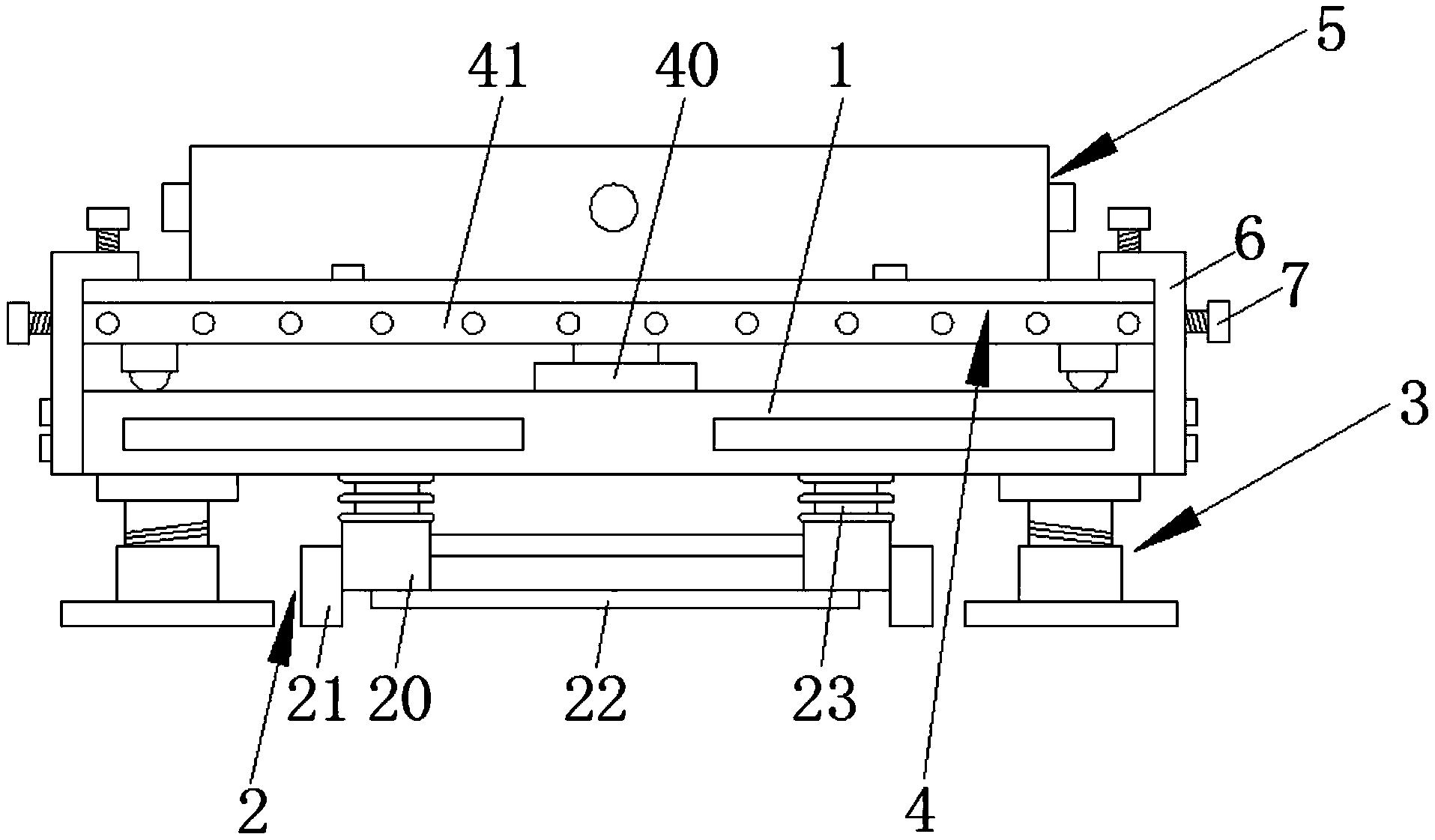
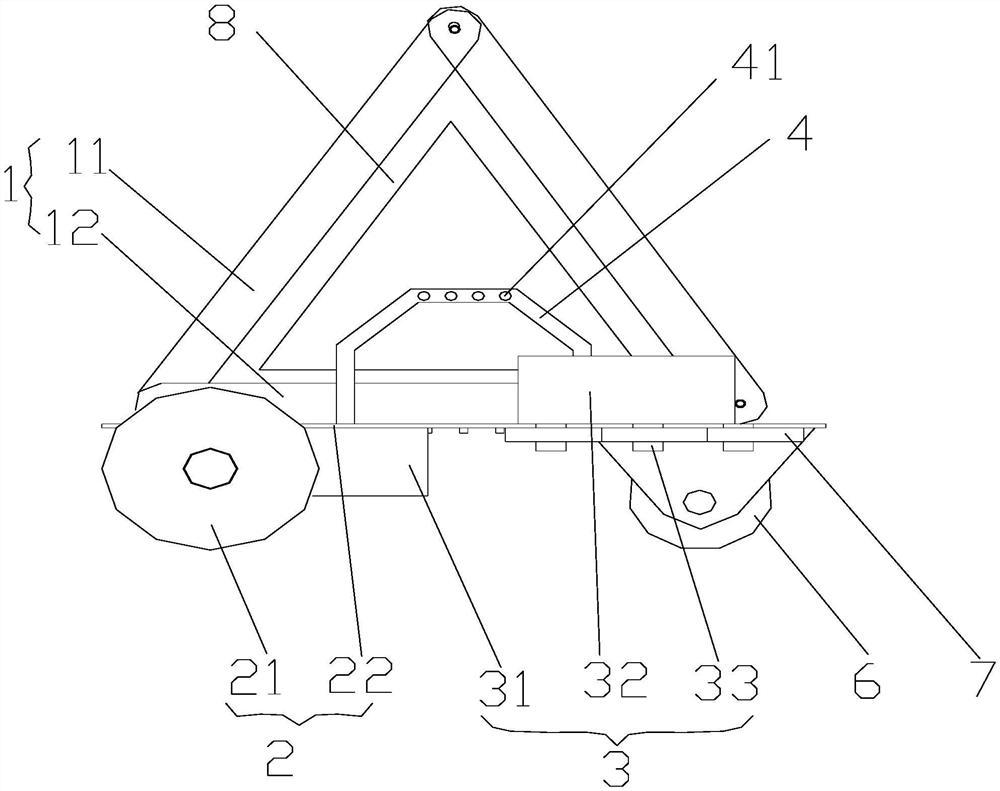
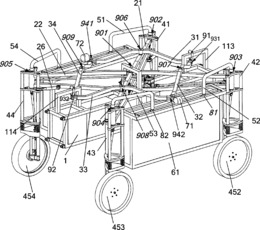
图2为机器人移动用行走底板的侧视图;
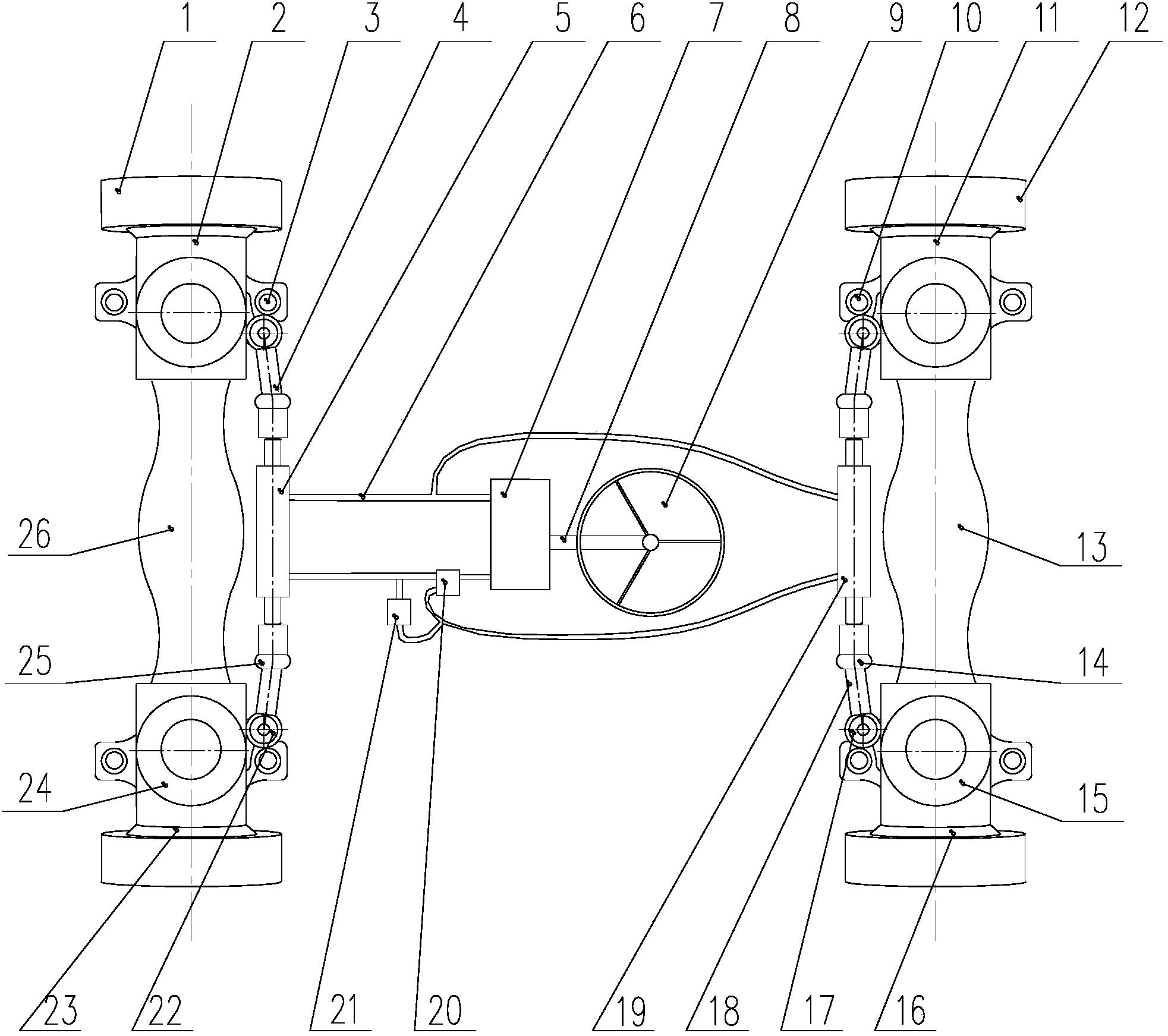
图3为图2中A处的结构示意图。
图中:1-安装板,2-连接板,3-红外传感器,4-定位杆,5-定位槽,6-伸缩杆,7-第一弹簧,8-连接杆,9-连接块,10-滑块,11-固定块,12-第一电机,13-第一带轮,14-转杆,15-旋转块,16-固定杆,17-脚轮,18-第二电机,19-传动杆,20-皮带,21-滑槽,22-限位板。
具体实施方式
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
实施例1
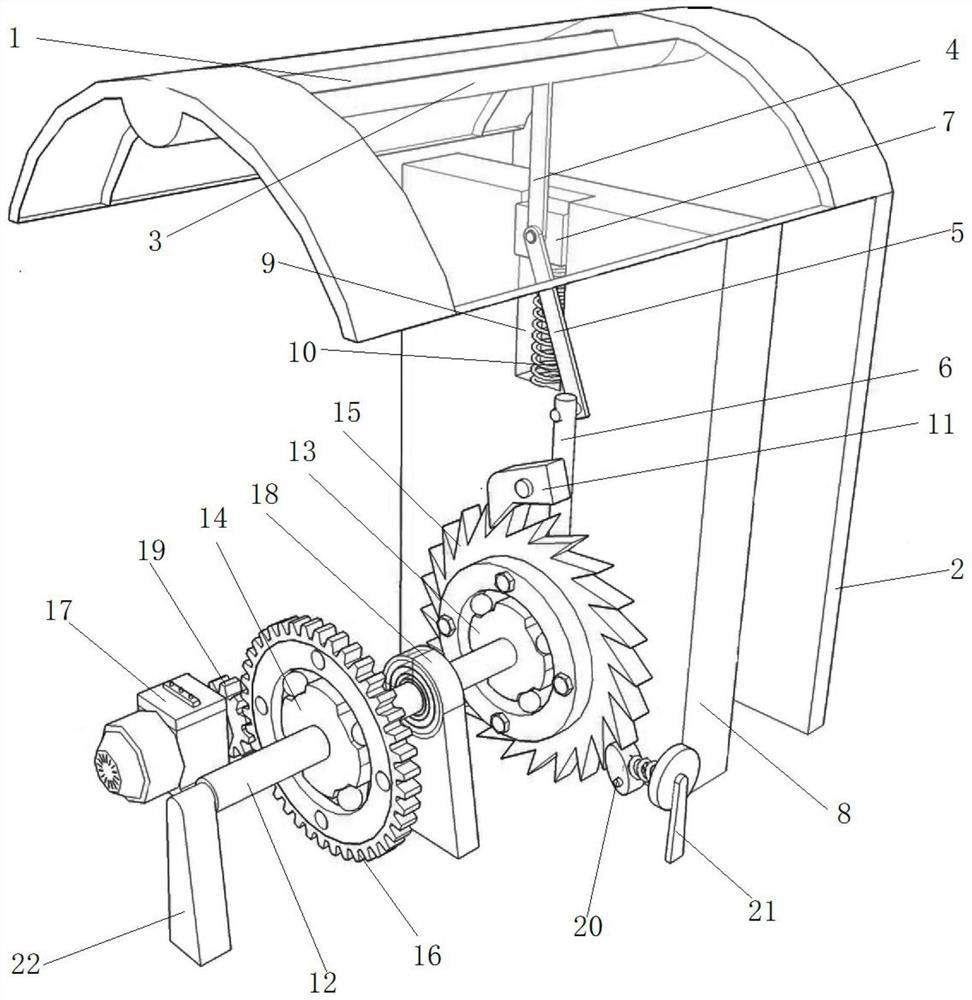
请参阅图1~3,本实用新型实施例中,一种机器人移动用行走底板,包括安装板1,所述安装板1下侧设置有连接板2,所述连接板2与安装板1之间设置有减震机构,所述连接板2下侧设置有旋转块15,所述旋转块15与连接板2之间设置有转向机构,所述旋转块15内侧轴承连接设置有固定杆16,所述固定杆16左右两侧固定连接设置有脚轮17,所述固定杆16下侧设置有与旋转块15螺栓连接的第二电机18,所述第二电机18与固定杆16啮合连接。
实施例2
本实施例中,所述转向机构包括固定块11、第一电机12和转杆14,所述固定块11固定连接设置在连接板2底部前后两侧,两侧所述固定块11底端均设置有凹槽,前侧所述凹槽内螺栓连接设置有第一电机12,所述第一电机12与控制器连接,所述第一电机12输出端与转杆14连接,所述转杆14上固定连接设置有第一带轮13,后侧所述凹槽内轴承连接设置有传动杆19,所述传动杆19上固定连接设置有第二带轮,所述第一带轮13与第二带轮之间通过皮带20连接,所述转杆14和传动杆19底端均与旋转块15固定连接,所述连接板2前后左右四侧均固定连接设置有红外传感器3,所述红外传感器3与控制器连接,通过设置红外传感器3和第一电机12,可以检测装置行走路线前侧是否有障碍物,当有障碍物时,通过第一电机12实现脚轮17的旋转,使装置继续前进,使装置可以绕开障碍物继续行走,提升了装置行走过程的流畅性。
本实施例中,所述减震机构包括滑槽21、滑块10和连接杆8,所述滑槽21设置在连接板2顶端,所述滑槽21内滑动连接设置有滑块10,所述滑块10顶端固定连接设置有连接块9,所述连接块9上铆接设置有连接杆8,所述连接杆8另一端与安装板1铰接,所述滑块10与连接板2之间固定连接设置有第二弹簧,通过设置减震机构,可以减少颠簸路面对装置的影响,利于提高装置移动过程的平稳性。
本实施例中,所述滑槽21内侧设置有限位板22,所述限位板22与滑块10滑动连接,通过设置限位板22,可以提升滑块10滑动过程的稳定性。
本实施例中,所述安装板1底部固定连接设置有定位杆4,所述定位杆4内侧滑动连接设置有伸缩杆6,所述伸缩杆6与定位杆4之间固定连接设置有第一弹簧7,所述连接板2顶端设置有与定位杆4相对应的定位槽5,通过设置定位杆4和定位槽5,可以避免安装板1的侧滑,提升了安装板1的稳定性。
该机器人移动用行走底板,通过设置红外传感器3和第一电机12,可以检测装置行走路线前侧是否有障碍物,当有障碍物时,通过第一电机12实现脚轮17的旋转,使装置继续前进,使装置可以绕开障碍物继续行走,提升了装置行走过程的流畅性,通过设置减震机构,可以减少颠簸路面对装置的影响,利于提高装置移动过程的平稳性,通过设置限位板22,可以提升滑块10滑动过程的稳定性,通过设置定位杆4和定位槽5,可以避免安装板1的侧滑,提升了安装板1的稳定性。
本实用新型的工作原理是:机器人安装在安装板1顶部,装置前进过程中,红外传感器3可以检测装置行走路线前侧是否有障碍物,当有障碍物时,控制器控制第一电机12运行,第一电机12带动转杆14和传动杆19转动,转杆14和传动杆19带动旋转块15转动,从而实现脚轮17的旋转,第二电机18带动脚轮17转动,使装置继续行走,当检测到前侧无障碍物时,第一电机12反向转动使脚轮17复位,机器继续向前运动,越过障碍物后,装置转向回到原有路线继续前进。
以上的仅是本实用新型的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本实用新型构思的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。
一种机器人移动用行走底板专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0