







专利摘要
本实用新型公开一种智能水面搬运船,包括船体,动力推进机构,搬运机构;收集仓,设置在船体中部且用于接收漂浮物,收集仓包括气流通道、进料口、出料口以及风机,气流通道沿纵向延伸,进料口和出料口分别连通气流通道,风机设置在气流通道内;分拣仓,设置在船体尾部且用于分拣来自收集仓输送的漂浮物,分拣仓包括分拣入口、第一仓室、第二仓室以及分拣机构,分拣入口与出料口相接通,第一仓室与第二仓室相隔离设置且均与分拣入口相接通,分拣机构用于将漂浮物导向至第一仓室或第二仓室;控制器,设置在船体上且与动力推进机构、搬运机构、风机、分拣机构控制连接,控制器用于接收外部控制信号来分别控制各个机构工作。
权利要求
1.一种智能水面搬运船,包括:
船体(1),沿纵向延伸;
动力推进机构(2),设置在所述的船体(1)上且被配置成驱动该船体(1)在水面上行进;
搬运机构(3),设置在所述的船体(1)头部且被配置成将水面上的漂浮物搬运至该船体(1)上;其特征在于,还包括,
收集仓(4),设置在所述的船体(1)中部且用于接收来自所述搬运机构(3)拾取的漂浮物,所述的收集仓(4)包括气流通道(41)、进料口(42)、出料口(43)以及风机(44),所述的气流通道(41)沿纵向延伸,所述的进料口(42)和所述的出料口(43)分别连通所述的气流通道(41),所述的风机(44)设置在所述的气流通道(41)内且用于提供从进料口(42)进入该气流通道(41)内的气流;
分拣仓(5),设置在所述的船体(1)尾部且用于分拣来自所述收集仓(4)输送的漂浮物,所述的分拣仓(5)包括分拣入口(51)、第一仓室(52)、第二仓室(53)以及分拣机构(54),所述的分拣入口(51)与所述的出料口(43)相接通,所述的第一仓室(52)与所述的第二仓室(53)相隔离设置且均与所述的分拣入口(51)相连通,所述的分拣机构(54)设置在所述的分拣入口(51)处且被配置成将漂浮物导向至所述的第一仓室(52)或所述的第二仓室(53);
控制器(6),设置在所述的船体(1)上,所述的控制器(6)与所述的动力推进机构(2)、所述的搬运机构(3)、所述的风机(44)、所述的分拣机构(54)分别控制连接,所述的控制器(6)被配置成接收外部控制信号来分别控制所述的动力推进机构(2)、所述的搬运机构(3)、所述的风机(44)、所述的分拣机构(54)工作。
2.根据权利要求1所述的智能水面搬运船,其特征在于:所述的动力推进机构(2)包括安装在所述船体(1)尾部的一对螺旋桨(21)和一对推进马达,各个所述的推进马达与相应所述的螺旋桨(21)传动连接,所述的控制器(6)与所述的一对推进马达分别控制连接。
3.根据权利要求1所述的智能水面搬运船,其特征在于:所述的搬运机构(3)包括摆臂(31)、取物斗(32)、第一舵机(33)和第二舵机(34),所述的摆臂(31)一端部可转动的设置在所述的船体(1)头部,所述的取物斗(32)可转动的设置在所述的摆臂(31)另一端部上,所述的第一舵机(33)设置在所述的船体(1)上且被配置成驱动所述的摆臂(31)绕一横向中心线(x)转动角度,所述的第二舵机(34)设置在所述的摆臂(31)上且被配置成驱动所述的取物斗(32)绕一纵向中心线(y)转动角度。
4.根据权利要求3所述的智能水面搬运船,其特征在于:所述的取物斗(32)为一沿横向延伸的筒状结构,该筒状结构的上部和相对的一端部设置有敞口(321),该筒状结构相对的另一端部设置有封盖(322),该筒状结构的底部设置有漏水口(323)。
5.根据权利要求1所述的智能水面搬运船,其特征在于:所述的进料口(42)处安装有接料斗(45)。
6.根据权利要求1所述的智能水面搬运船,其特征在于:所述的分拣仓(5)仓底壁沿倾斜于水平面向下的方向延伸。
7.根据权利要求1所述的智能水面搬运船,其特征在于:所述的分拣仓(5)内固定设置有沿纵向延伸且位于所述第一仓室(52)与所述第二仓室(53)之间的分隔板(55)。
8.根据权利要求7所述的智能水面搬运船,其特征在于:所述的分拣机构(54)包括分拣挡板(541)和分拣舵机(542),所述的分拣挡板(541)可转动的设置在所述的分隔板(55)上且靠近所述的分拣入口(51),所述的分拣舵机(542)与所述的分拣挡板(541)传动连接且用于驱动所述的分拣挡板(541)转动角度,所述的控制器(6)与所述的分拣舵机(542)控制连接。
9.根据权利要求7所述的智能水面搬运船,其特征在于:所述的分拣仓(5)具有第一分拣出口(521)和第二分拣出口(531),所述的第一分拣出口(521)与所述的第一仓室(52)相连通,所述的第二分拣出口(531)与所述的第二仓室(53)相连通,所述的分拣仓(5)还包括卸料机构(56),所述的卸料机构(56)被配置成打开所述的第一分拣出口(521)或所述的第二分拣出口(531)或将所述的第一分拣出口(521)和所述的第二分拣出口(531)全部关闭。
10.根据权利要求9所述的智能水面搬运船,其特征在于:所述的卸料机构(56)包括卸料挡板(561)和卸料舵机(562),所述的卸料挡板(561)可转动的设置在所述的分隔板(55)上且靠近所述的第一分拣出口(521)和所述的第二分拣出口(531),所述的卸料舵机(562)与所述的卸料挡板(561)传动连接且用于驱动该卸料挡板(561)转动角度,所述的控制器(6)与所述的卸料舵机(562)控制连接。
说明书
技术领域
本实用新型涉及水面机器人技术领域,特别涉及一种用于清理水面漂浮物的智能水面搬运船。
背景技术
水面清洁机器人通常由水面漂浮物自动回收装置和水面机器人组成,主要应用于海洋、湖泊、河道、滩涂,景区内的湖泊、池塘的固体垃圾、浮萍等清理以及危险区域进行远程作业。
现有的水面机器人的研究虽然取得了一定的进展,但是在水面搬运方面鲜有报道,相关的文献资料也很少,几乎没有相关设备。大部分的水面搬运船通常借助机械臂来抓取漂浮物,但是每次仅能抓取一个物品,然后就返回到摆放物品处,效率很低,而且船身基本不设分拣机构,或者分拣机构相当复杂,通常是将大量漂浮物逐个搬运至船上,然后托运至岸上,人工进行分拣操作,一来搬运效率较低,二来是人工分拣繁琐,操作不方便。
实用新型内容
为了解决上述技术问题,本实用新型的目的是提供一种便于漂浮物快进入分拣仓、提高分拣效率的智能水面搬运船。
为此,本实用新型提供了一种智能水面搬运船,包括:
船体,沿纵向延伸;
动力推进机构,设置在所述的船体上且被配置成驱动该船体在水面上行进;
搬运机构,设置在所述的船体头部且被配置成将水面上的漂浮物搬运至该船体上;
收集仓,设置在所述的船体中部且用于接收来自所述搬运机构拾取的漂浮物,所述的收集仓包括气流通道、进料口、出料口以及风机,所述的气流通道沿纵向延伸,所述的进料口和所述的出料口分别连通所述的气流通道,所述的风机设置在所述的气流通道内且用于提供从进料口进入该气流通道内的气流;
分拣仓,设置在所述的船体尾部且用于分拣来自所述收集仓输送的漂浮物,所述的分拣仓包括分拣入口、第一仓室、第二仓室以及分拣机构,所述的分拣入口与所述的出料口相接通,所述的第一仓室与所述的第二仓室相隔离设置且均与所述的分拣入口相连通,所述的分拣机构设置在所述的分拣入口处且被配置成将漂浮物导向至所述的第一仓室或所述的第二仓室;
控制器,设置在所述的船体上,所述的控制器与所述的动力推进机构、所述的搬运机构、所述的风机、所述的分拣机构分别控制连接,所述的控制器被配置成接收外部控制信号来分别控制所述的动力推进机构、所述的搬运机构、所述的风机、所述的分拣机构工作。
通过设置收集仓、分拣仓和控制器,收集仓内设置气流通道和风机,通过控制器来控制搬运机构、风机和分拣机构分别工作,基于漂浮物重量轻的特性,借助风机产生从进料口进入气流通道内的气流,将漂浮物快速输送至分拣仓,并通过分拣机构将漂浮物导向至第一仓室或第二仓室,从而提高分拣效率,操作起来更加方便。
作为本实用新型智能水面搬运船的一个优选方案,所述的动力推进机构包括安装在所述船体尾部的一对螺旋桨和一对推进马达,各个所述的推进马达与相应所述的螺旋桨传动连接,所述的控制器与所述的一对推进马达分别控制连接。通过控制器分别控制两个推进马达运转,通过调节两个推进马达的转速来实现加减速行进,通过控制两个推进马达的转速不一致,例如,控制其中一个推进马达加速,另一个推进马达减速,即可实现船体转向功能。
作为本实用新型智能水面搬运船的另一个优选方案,所述的搬运机构包括摆臂、取物斗、第一舵机和第二舵机,所述的摆臂一端部可转动的设置在所述的船体头部,所述的取物斗可转动的设置在所述的摆臂另一端部上,所述的第一舵机设置在所述的船体上且被配置成驱动所述的摆臂绕一横向中心线转动角度,所述的第二舵机设置在所述的摆臂上且被配置成驱动所述的取物斗绕一纵向中心线转动角度。摆臂在第一舵机的驱动下可绕一横向中心线转动角度,从而将取物斗摆动升降,取物斗在第二舵机的驱动下可绕一纵向中心线转动角度,从而搬运机构可实现两个轴的旋转角度,类似于机械臂一样,方便拾取水面的漂浮物。
作为更进一步的优选方案,所述的取物斗为一沿横向延伸的筒状结构,该筒状结构的上部和相对的一端部设置有敞口,该筒状结构相对的另一端部设置有封盖,该筒状结构的底部设置有漏水口。取物斗在拾取漂浮物时类似舀子一样将漂浮物舀起,并将水等从漏水口滤出,起到筛选作用,可以一次拾取更多的漂浮物。
作为本实用新型智能水面搬运船的又一个优选方案,所述的进料口处安装有接料斗。设置接料斗方便漂浮物更好的落入收集仓内。
作为本实用新型智能水面搬运船的又一个优选方案,所述的分拣仓仓底壁沿倾斜于水平面向下的方向延伸。分拣仓仓底壁的这种倾斜设置,有利于进入分拣仓内的漂浮物在分拣后滑入相应的仓室内。
作为本实用新型智能水面搬运船的又一个优选方案,所述的分拣仓内固定设置有沿纵向延伸且位于所述第一仓室与所述第二仓室之间的分隔板。从而第一仓室和第二仓室均沿纵向延伸,与船体的延伸方向一致,方便漂浮物从船头向船尾输送,也方便漂浮物的分拣作业。
作为更进一步的优选方案,所述的分拣机构包括分拣挡板和分拣舵机,所述的分拣挡板可转动的设置在所述的分隔板上且靠近所述的分拣入口,所述的分拣舵机与所述的分拣挡板传动连接且用于驱动所述的分拣挡板转动角度,所述的控制器与所述的分拣舵机控制连接。
作为更进一步的优选方案,所述的分拣仓具有第一分拣出口和第二分拣出口,所述的第一分拣出口与所述的第一仓室相连通,所述的第二分拣出口与所述的第二仓室相连通,所述的分拣仓还包括卸料机构,所述的卸料机构被配置成打开所述的第一分拣出口或所述的第二分拣出口或将所述的第一分拣出口和所述的第二分拣出口全部关闭。设置两个分拣出口和卸料机构,从而在将漂浮垃圾运输至靠岸后,可分别卸出漂浮垃圾,能够对漂浮物进行二次分类,例如,搬运船行至岸边A点后,将第一分拣出口打开,将第一仓室内的漂浮垃圾卸出,行至岸边B点后,将第二分拣口打开,将第二仓室内的漂浮垃圾卸出。
作为更进一步的优选方案,所述的卸料机构包括卸料挡板和卸料舵机,所述的卸料挡板可转动的设置在所述的分隔板上且靠近所述的第一分拣出口和所述的第二分拣出口,所述的卸料舵机与所述的卸料挡板传动连接且用于驱动该卸料挡板转动角度,所述的控制器与所述的卸料舵机控制连接。
附图说明
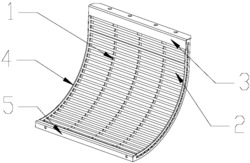
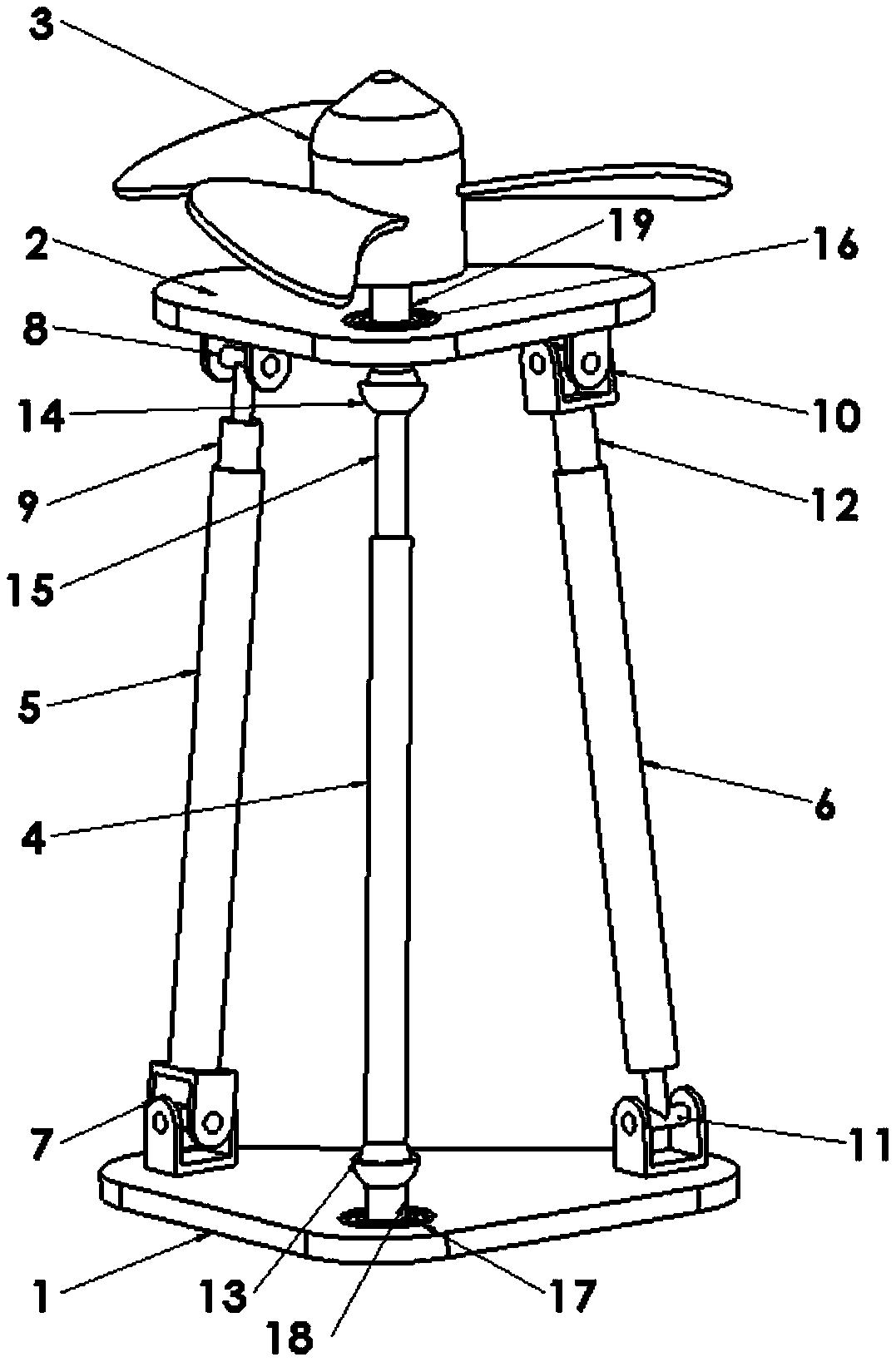
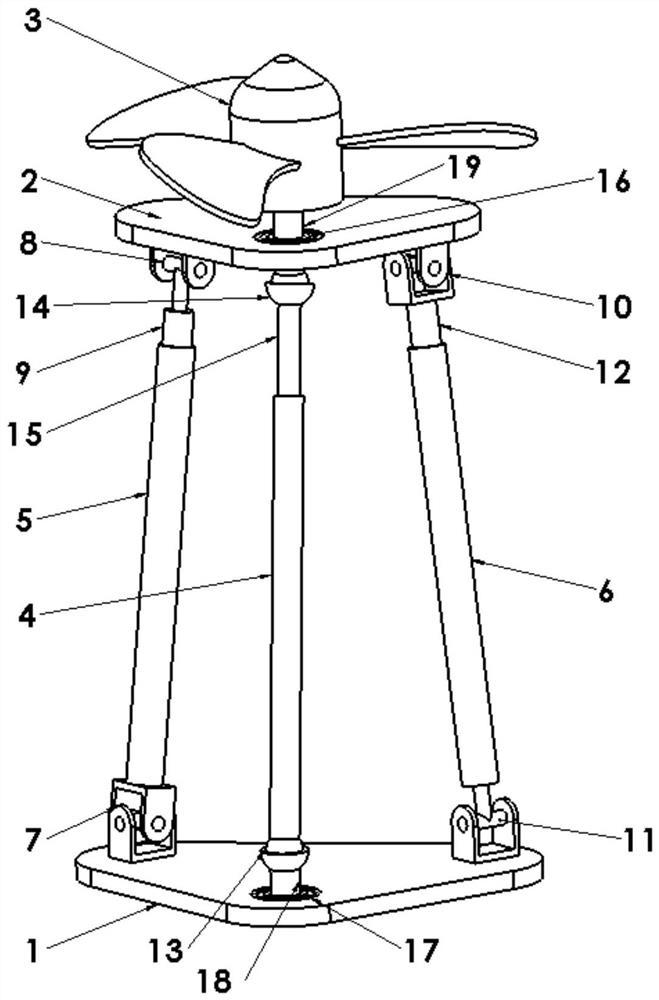
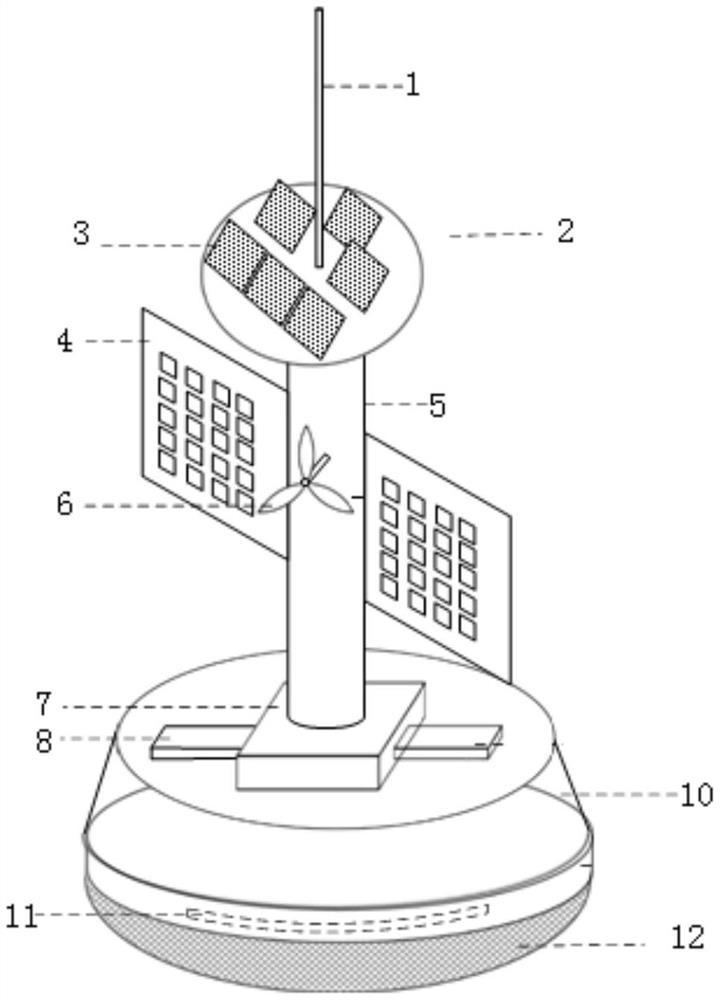
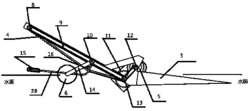
图1是本实用新型智能水面搬运船的立体示意图;
图2是图1中所示智能水面搬运船的另一侧立体示意图;
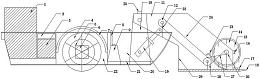
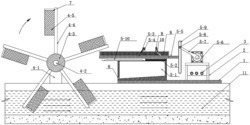
图3是图1中所示智能水面搬运船的俯视示意图;
图4是图1中所示智能水面搬运船的船尾一侧示意图;
图5是图1中所示智能水面搬运船的船身一侧示意图;
其中:100、智能水面搬运船;
1、船体;
2、动力推进机构;21、螺旋桨;
3、搬运机构;31、摆臂;32、取物斗;33、第一舵机;34、第二舵机;x、横向中心线;y、纵向中心线;321、敞口;322、封盖;323、漏水口;
4、收集仓;41、气流通道;42、进料口;43、出料口;44、风机;45、接料斗;
5、分拣仓;51、分拣入口;52、第一仓室;53、第二仓室;54、分拣机构;55、分隔板;56、卸料机构;521、第一分拣出口;531、第二分拣出口;541、分拣挡板;542、分拣舵机;561、卸料挡板;562、卸料舵机;
6、控制器。
具体实施方式
为详细说明实用新型的技术内容、构造特征、所达成目的及功效,下面将结合实施例并配合附图予以详细说明。以下实施例仅用于详细说明本实用新型,并不以任何形式限制本实用新型的保护范围。其中,以下实施例中所述的纵向是指图1至图2中所示船体的头部和尾部的延伸方向,即船体的长度方向,所述的横向是指图1至图2中所示船体的宽度方向。
如图1至图2所示的智能水面搬运船100,其包括船体1、动力推进机构2、搬运机构3、收集仓4、分拣仓5以及控制器6。
船体1沿纵向延伸,动力推进机构2设置在船体1上且被配置成驱动该船体1在水面上行进。具体的,结合图4所示,动力推进机构2包括安装在船体1尾部的一对螺旋桨21和一对推进马达(图未示),各个推进马达与相应螺旋桨21传动连接,控制器6与一对推进马达分别控制连接。通过控制器6分别控制两个推进马达运转,通过调节两个推进马达的转速来实现加减速行进,通过控制两个推进马达的转速不一致,例如,控制其中一个推进马达加速,另一个推进马达减速,即可实现船体转向功能。
搬运机构3,设置在船体1头部且被配置成将水面上的漂浮物搬运至该船体1上。具体的,结合图5所示,搬运机构3包括摆臂31、取物斗32、第一舵机33和第二舵机34,摆臂31一端部可转动的设置在船体1头部,取物斗32可转动的设置在摆臂31另一端部上,第一舵机33设置在船体1上且被配置成驱动摆臂31绕一横向中心线x转动角度,第二舵机34设置在摆臂31上且被配置成驱动取物斗32绕一纵向中心线y转动角度。动作时,摆臂31在第一舵机33的驱动下可绕一横向中心线x转动角度,从而将取物斗32摆动升降,取物斗32在第二舵机34的驱动下可绕一纵向中心线y转动角度,从而搬运机构3可实现两个轴的旋转角度,类似于机械臂一样,方便拾取水面的漂浮物。结合图3所示,取物斗32为一沿横向延伸的筒状结构,该筒状结构的上部和相对的一端部设置有敞口321,该筒状结构相对的另一端部设置有封盖322,该筒状结构的底部设置有漏水口323。取物斗32在拾取漂浮物时类似舀子一样将漂浮物舀起,并将水等从漏水口323滤出,起到筛选作用,可以一次拾取更多的漂浮物。
收集仓4,设置在船体1中部且用于接收来自搬运机构3拾取的漂浮物,收集仓4包括气流通道41、进料口42、出料口43以及风机44,气流通道41沿纵向延伸,进料口42和出料口43分别连通气流通道41,风机44设置在气流通道41内且用于提供从进料口42进入该气流通道41内的气流。进料口42处安装有接料斗45。设置接料斗方便漂浮物更好的落入收集仓内。
分拣仓5,设置在船体1尾部且用于分拣来自收集仓4输送的漂浮物,分拣仓5包括分拣入口51、第一仓室52、第二仓室53以及分拣机构54,分拣入口51与出料口43相接通,第一仓室52与第二仓室53相隔离设置且均与分拣入口51相连通,分拣机构54设置在分拣入口51处且被配置成将漂浮物导向至第一仓室52或第二仓室53。具体的,分拣仓5内固定设置有沿纵向延伸且位于第一仓室52与第二仓室53之间的分隔板55。从而第一仓室52和第二仓室53均沿纵向延伸,与船体1的延伸方向一致,方便漂浮物从船头向船尾输送,也方便漂浮物的分拣作业。
结合图5所示,分拣仓5仓底壁沿倾斜于水平面向下的方向延伸。分拣仓仓底壁的这种倾斜设置,有利于进入分拣仓内的漂浮物在分拣后滑入相应的仓室内。分拣机构54包括分拣挡板541和分拣舵机542,分拣挡板541绕一z轴可转动的设置在分隔板55上且靠近分拣入口51,分拣舵机542与分拣挡板541传动连接且用于驱动分拣挡板541转动角度,控制器6与分拣舵机542控制连接。
结合图3所示,分拣仓5具有第一分拣出口521和第二分拣出口531,第一分拣出口521与第一仓室52相连通,第二分拣出口531与第二仓室53相连通,分拣仓5还包括卸料机构56,卸料机构56被配置成打开第一分拣出口521或第二分拣出口531或将第一分拣出口521和第二分拣出口531全部关闭。设置两个分拣出口和卸料机构,从而在将漂浮垃圾运输至靠岸后,可分别卸出漂浮垃圾,能够对漂浮物进行二次分类,例如,搬运船行至岸边A点后,将第一分拣出口打开,将第一仓室内的漂浮垃圾卸出,行至岸边B点后,将第二分拣口打开,将第二仓室内的漂浮垃圾卸出。
卸料机构56包括卸料挡板561和卸料舵机562,卸料挡板561可转动的设置在分隔板55上且靠近第一分拣出口521和第二分拣出口531,卸料舵机562与卸料挡板561传动连接且用于驱动该卸料挡板561转动角度,控制器6与卸料舵机562控制连接。
控制器6,设置在船体1上,控制器6与动力推进机构2、搬运机构3、风机44、分拣机构54分别控制连接,控制器6被配置成接收外部控制信号来分别控制动力推进机构2、搬运机构3、风机44、分拣机构54工作。本例中,控制器选用R9DS信号接收器,用户可通过乐迪AT9S遥控器(信号发射器)来向R9DS信号接收器发送控制指令,从而控制器分别给船体1尾部的推进马达、各个舵机、风机等发送控制信号,控制各个动力组件开始工作,从而完成漂浮物的拾取、收集、分拣、卸料等作业。当然,控制器不限于采用信号接收器与匹配的信号发射器来操纵搬运船,控制器也可是一个集成控制板、微控制器或微处理器等芯片模块结构,其可与用户的智能终端进行通讯连接,例如可利用用户的智能手机、个人电脑等来远程操纵搬运船。
其具体的工作原理是这样实现的:控制器6接收用户的外部远程设备发出的指令,并给两个推进马达发送控制信号,驱动该对推进马达运转,带动螺旋桨21转动,从而驱动船体1在水面上行进或转向等。在拾取漂浮物时,控制器6接收外部指令并给第一舵机33和第二舵机34分别发送控制信号,摆臂31和取物斗32分别转动角度,从而将水面上的漂浮物拾取,并搬运至船体1上,即搬运至接料斗45的上方并倾倒漂浮物。与此同时,控制器6接收外部指令并给风机44发送控制信号,风机44开启运转,并在气流通道41内产生吹送气流,接料斗45接收来自搬运机构3拾取的漂浮物,漂浮物顺势通过进料口42进入收集仓4的气流通道41内,并在风机44的气流推动下被输送至出料口43处。然后,控制器6接收外部指令并给分拣舵机542发送控制信号,分拣舵机542驱动分拣挡板541转动角度,从而基于用户的操作指令选择性的将漂浮物导向至第一仓室52或第二仓室53。当两个仓室载满漂浮物后,控制器6接收外部指令并给两个推进马达发送控制信号,从而动力推进机构2推动船体1靠向岸边指定地点行进,例如,行进至A点或B点时,控制器6接收到外部指令并给卸料舵机562发送控制信号,卸料舵机562驱动卸料挡板561转动角度,从而基于用户的操作指令选择性的打开第一分拣出口521或第二分拣出口531,完成卸料作业。
上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
一种智能水面搬运船专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0