









专利摘要
本实用新型公开了一种水黾机器人的形状记忆合金支撑腿;该形状记忆合金支撑腿由两根具有弹性的记忆合金丝弯折后形成的四条支撑腿;这四条支撑腿分为A组支撑腿和B组支撑腿;通过对A组支撑腿和B组支撑腿顶部的迂回部进行温度控制,即在不同温度下具有不同的形态,通过机器人的热激活弹簧的形态切换,并在形状记忆合金腿部喷涂超疏水涂层PTFE,使水黾机器人的四条支撑腿在水面上实现连续跳跃动作,如垂直跳跃运动,前进后退跳跃和左右跳跃运动。
权利要求
1.一种水黾机器人的形状记忆合金支撑腿,其特征在于:该形状记忆合金支撑腿由两根具有弹性的记忆合金丝弯折后形成的四条支撑腿;
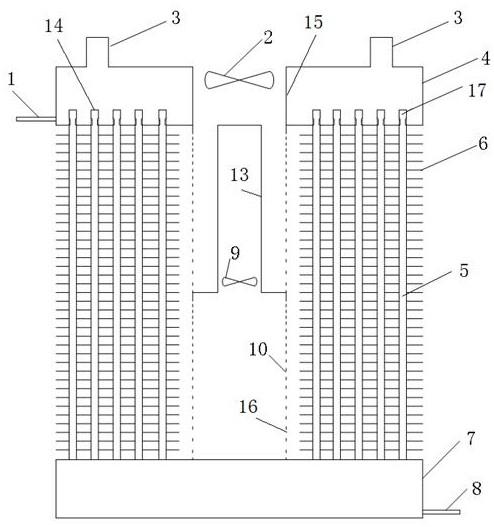
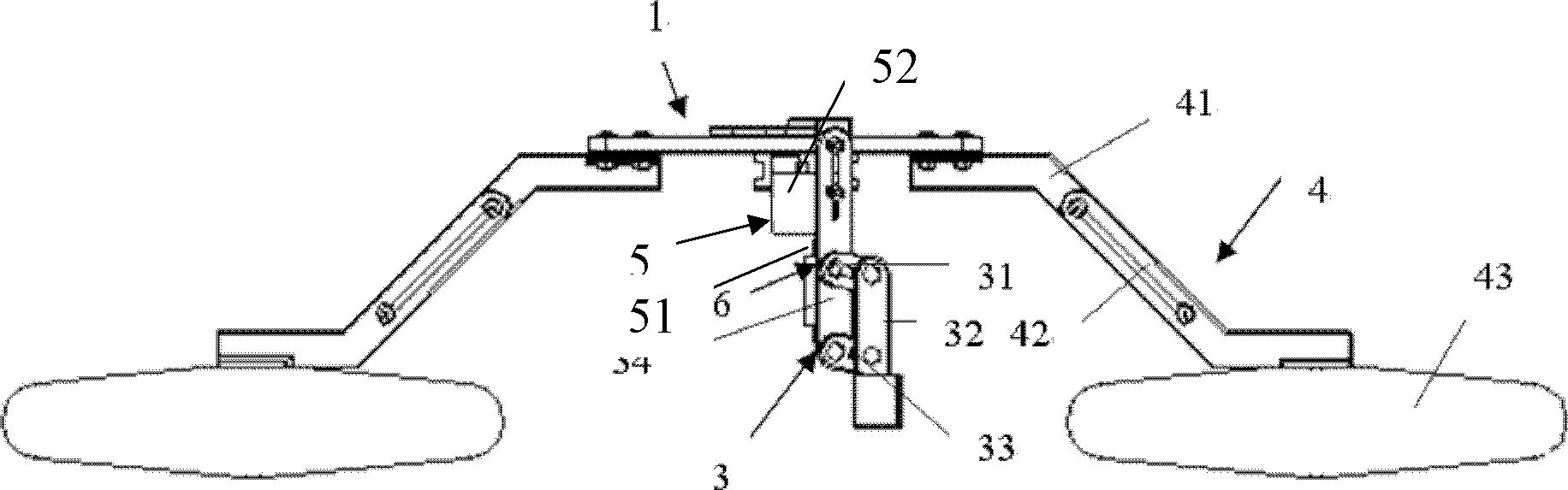
这四条支撑腿分别是:第一支撑腿(1)、第二支撑腿(2)、第三支撑腿(3)、第四支撑腿(4);其中,第一支撑腿(1)和第二支撑腿(2)由同一根记忆合金丝折弯构成A组支撑腿;第三支撑腿(3)和第四支撑腿(4)由另一根记忆合金丝折弯构成B组支撑腿;
A组支撑腿和B组支撑腿的迂回部的顶端,采用弹性绝缘块7固定在一起并相互绝缘;
在A组支撑腿的迂回部下方跨接有A传力横杆(51),在A传力横杆(51)上安装有A温度控制模块(5);A温度控制模块(5)的输出端分别电连接第一支撑腿(1)和第二支撑腿(2)的迂回部,用于对第一支撑腿(1)和第二支撑腿(2)的迂回部进行局部加热;
在B组支撑腿的迂回部下方跨接有B传力横杆(61),在B传力横杆(61)上安装有B温度控制模块(6);B温度控制模块(6)的输出端分别电连接第三支撑腿(3)和第四支撑腿(4)的迂回部,用于对第一支撑腿(1)和第二支撑腿(2)的迂回部进行局部加热;
A组支撑腿和B组支撑腿的支撑脚向外弯曲,呈弧线状。
2.根据权利要求1所述水黾机器人的形状记忆合金支撑腿,其特征在于:记忆合金丝的直径为150~200微米;四条支撑腿的长度相同,分别为3~5厘米。
3.根据权利要求2所述水黾机器人的形状记忆合金支撑腿,其特征在于:A组支撑腿和B组支撑腿的支撑脚上,分别喷涂有PTFE疏水涂层。
4.根据权利要求1所述水黾机器人的形状记忆合金支撑腿,其特征在于:A传力横杆(51)与B传力横杆(61)之间可增设助力弹簧(8);助力弹簧(8)的收缩力矩小于A组支撑腿和B组支撑腿的收缩力矩。
说明书
技术领域
本实用新型涉及水黾机器人,尤其涉及一种水黾机器人的形状记忆合金支撑腿。
背景技术
水黾是一种半水生的节肢动物,经过千万年来的自然选择进化,获得“水上漂”的能力。水黾的身体质量极轻,并且腿部具有特殊的微纳米结构,使其能在水面上任意滑行跳跃。研究人员在高倍显微镜下观察发现,水黾的腿部上有数千根方向相同的阵列微米级刚毛,这些刚毛尺寸为几个微米,表面上形成螺旋状纳米结构的沟槽,吸附在沟槽的空气形成微气垫结构,该结构让水黾在水面上自由滑行跳跃,却不会打湿腿部。
为了精确地实现模仿水黾机构,利用激光选区熔化(Selective Laser Melting,SLM)技术进行制备水黾机器人,该技术又称“金属3D打印技术”,是增材制造的前沿技术,利用激光束把金属或合金粉末选区逐层熔化,堆积成一个冶金结合、组织致密的实体,从而获得几乎任意形状、具有完全冶金结合的金属功能零件。
发明内容
本实用新型的目的在于克服上述现有技术的缺点和不足,提供一种水黾机器人的形状记忆合金支撑腿。利用该水黾机器人可实现在水面上的自由滑行搜索与跳跃躲避障碍物。
本实用新型通过下述技术方案实现:
一种水黾机器人的形状记忆合金支撑腿,该形状记忆合金支撑腿由两根具有弹性的记忆合金丝弯折后形成的四条支撑腿;
这四条支撑腿分别是:第一支撑腿1、第二支撑腿2、第三支撑腿3、第四支撑腿4;其中,第一支撑腿1和第二支撑腿2由同一根记忆合金丝折弯构成A组支撑腿;第三支撑腿3和第四支撑腿4由另一根记忆合金丝折弯构成B组支撑腿;
A组支撑腿和B组支撑腿的迂回部的顶端,采用弹性绝缘块7固定在一起并相互绝缘;
在A组支撑腿的迂回部下方跨接有A传力横杆51,在A传力横杆51上安装有A温度控制模块5;A温度控制模块5的输出端分别电连接第一支撑腿1和第二支撑腿2的迂回部,用于对第一支撑腿1和第二支撑腿2的迂回部进行局部加热;
在B组支撑腿的迂回部下方跨接有B传力横杆61,在B传力横杆61上安装有B温度控制模块6;B温度控制模块6的输出端分别电连接第三支撑腿3和第四支撑腿4的迂回部,用于对第一支撑腿1和第二支撑腿2的迂回部进行局部加热;
A组支撑腿和B组支撑腿的支撑脚向外弯曲,呈弧线状。
记忆合金丝的直径为150~200微米;四条支撑腿的长度相同,分别为3~5厘米。
A组支撑腿和B组支撑腿的支撑脚上,分别喷涂有PTFE疏水涂层。
A传力横杆51与B传力横杆61之间可增设助力弹簧8;助力弹簧8的收缩力矩小于A组支撑腿和B组支撑腿的收缩力矩。
水黾机器人的形状记忆合金支撑腿的四条支撑腿制备方法如下:
采用Ni50Ti形状记忆合金粉末,通过激光选区熔化成型设备,打印成型A组支撑腿和B组支撑腿;
将成型后的A组支撑腿和B组支撑腿置于炉具中,以8℃/min升温速率升至800℃,进行固溶处理,保温30min;保温结束后,水冷淬火;
利用差式扫描热量仪测定形状记忆合金(Ni50Ti)的相变点,获得的组织的马氏体转变开始点和结束点,以及奥氏体转变开始点和结束点,利用测定的相变进行加热形变热控制处理;
最后在A组支撑腿和B组支撑腿的下部及支撑脚上分别喷涂疏水涂层。
水黾机器人的形状记忆合金支撑腿的运行方法如下:
将水黾机器人的形状记忆合金支撑腿置于水面上;
A温度控制模块5和B温度控制模块6分别对A组支撑腿和B组支撑腿上端的迂回部进行加热;
当温度上升时,马氏体组织转变为奥氏体,由于奥氏体结构的致密度高于马氏体结构,故在升温过程中其体积变小,宏观表现为弹簧收缩,当弹簧收缩时,A传力横杆51和B传力横杆61受到A组支撑腿和B组支撑腿内部拉伸作用力,将力传支撑腿的中部和下部,使支撑腿中部往内收缩,下部往下方和内部收缩;
当停止加热时,在空气中迅速冷却,组织从奥氏体转变为马氏体,导致体积膨胀,其宏观表现为弹簧扩展;在弹簧收缩与扩展的连续交替动作过程中,使A组支撑腿和B组支撑腿相应的作出合拢与伸展动作;此时,在支撑脚上PTFE疏水涂层的的反作用力下,使四条支撑腿在水面上实现连续跳跃动作。
本实用新型相对于现有技术,具有如下的优点及效果:
原材料选择:本实用新型水黾机器人的四条支撑腿通过激光选区熔化成型设备成型,其原材料为形状记忆合金粉末,其粉末球形度好,粒径为30微米左右。由于该结构微细,均为百微米级的丝结构,采用螺旋层错扫描和后勾边方式,使加工更为精密。
支撑脚上分别喷涂有PTFE疏水涂层,利用喷涂-干燥方法,以低表面能物质PTFE的乳液为前驱体,以热处理后的水黾机器人的腿部为基体,制备同时具有超疏水性的涂层,其表面粗糙,由许多微纳米级的凹凸坑状结构组成。PTFE疏水涂层实现水黾机器人在水面上的漂浮。
利用两个温度控制模块,分别对A组支撑腿和B组支撑腿上端的迂回部进行加热;通过对迂回部温度的同步或者异步升降控制变化,从而可控制水黾机器人的四条支撑腿在水面上实现连续跳跃动作,如垂直跳跃运动,前进后退跳跃和左右跳跃运动。
附图说明
图1为本实用新型水黾机器人的形状记忆合金支撑腿俯视结构示意图。
图2为本实用新型水黾机器人的形状记忆合金支撑腿运动状态示意图,图中箭头表示运动方向。
具体实施方式
下面结合具体实施例对本实用新型作进一步具体详细描述。
实施例
如图1-2所示。本实用新型公开了一种水黾机器人的形状记忆合金支撑腿,该形状记忆合金支撑腿由两根具有弹性的记忆合金丝弯折后形成的四条支撑腿;
这四条支撑腿分别是:第一支撑腿1、第二支撑腿2、第三支撑腿3、第四支撑腿4;其中,第一支撑腿1和第二支撑腿2由同一根记忆合金丝折弯构成A组支撑腿;第三支撑腿3和第四支撑腿4由另一根记忆合金丝折弯构成B组支撑腿;
A组支撑腿和B组支撑腿的迂回部的顶端,采用弹性绝缘块7固定在一起并相互绝缘;
在A组支撑腿的迂回部下方跨接有A传力横杆51,在A传力横杆51上安装有A温度控制模块5;A温度控制模块5的输出端分别电连接第一支撑腿1和第二支撑腿2的迂回部,用于对第一支撑腿1和第二支撑腿2的迂回部进行局部加热;
在B组支撑腿的迂回部下方跨接有B传力横杆61,在B传力横杆61上安装有B温度控制模块6;B温度控制模块6的输出端分别电连接第三支撑腿3和第四支撑腿4的迂回部,用于对第一支撑腿1和第二支撑腿2的迂回部进行局部加热;
A组支撑腿和B组支撑腿的支撑脚向外弯曲,呈弧线状。
记忆合金丝的直径为150~200微米;四条支撑腿的长度相同,分别为3~5厘米。
A组支撑腿和B组支撑腿的支撑脚上,分别喷涂有PTFE疏水涂层。
A传力横杆51与B传力横杆61之间可增设助力弹簧8;助力弹簧8的收缩力矩小于A组支撑腿和B组支撑腿的收缩力矩。
形状记忆合金支撑腿设计参数:四条支撑腿的直径分别为200微米,支撑腿下部1长度约为0.5cm,中部2长度约3cm,上部3的长度约1cm。
助力弹簧8的设计参数:弹簧丝的直径尺寸约为200微米,螺距约为0.8mm,其弹簧直径约为1mm。
四条支撑腿的成型的主要方法为激光选区熔化成型方法,采用激光选区熔化成型设备,对Ni50Ti形状记忆合金粉末进行加工成型,路径规划方式为螺旋层错扫描方式,后勾边方式,其成型的参数为:激光功率=150W,扫描速度=1100mm/s,扫描间距=0.08mm,层厚=0.03mm。
水黾机器人3D打印成型结束后,需要进一步的后处理,对形状记忆合金的内部组织进行改变,以符合温度转变区间。
本实用新型利用形状记忆合金的形状记忆效应,在不同温度下具有不同的形态,通过机器人的热激活弹簧的形态切换,并在形状记忆合金腿部喷涂超疏水涂层PTFE,实现机器人在水上的跳跃。本实用新型是结合现有的激光选区熔化技术和功能材料技术,形成一种智能机器人的加工方法,该款新型机器人可用于污水环境检测,探索救援行动以及战场军事侦查等领域。
水黾机器人的形状记忆合金支撑腿的四条支撑腿制备方法如下:
采用Ni50Ti形状记忆合金粉末,通过激光选区熔化成型设备,打印成型A组支撑腿和B组支撑腿;
将成型后的A组支撑腿和B组支撑腿置于炉具中,以8℃/min升温速率升至800℃,进行固溶处理,保温30min;保温结束后,水冷淬火;
利用差式扫描热量仪测定Ni50Ti形状记忆合金的相变点,获得的组织的马氏体转变开始点和结束点(Ms和Mf点),以及奥氏体转变开始点和结束点(As和Af点),利用测定的相变进行加热形变热控制处理;
最后在A组支撑腿和B组支撑腿的下部及支撑脚上分别喷涂疏水涂层(PTFE)。
如上所述,便可较好地实现本实用新型。
本实用新型的实施方式并不受上述实施例的限制,其他任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
一种水黾机器人的形状记忆合金支撑腿专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0