








专利摘要
一种基于关节式气动软体致动器驱动的仿蛙游动机器人。本发明涉及一种仿蛙游动机器人,本发明为解决现有技术中仿蛙游动机器人本体机构的设计主要以刚性材料为主,其承载能力和运动精度较高,结构复杂,体积和重量偏大,难以实现机器的轻量化和小型化,推进过程受到阻力较大,降低了机器人运行过程的机动性,并且密封性不佳,易发生透水现象的问题,它包括机器人主躯干、机器人左前肢、机器人右前肢、机器人左后肢、机器人右后肢、气动系统和电气控制系统;机器人主躯干包括流线型上壳体、下壳体和多个主体躯干卡扣,气动系统与机器人左前肢、机器人右前肢、机器人左后肢和机器人右后肢连通。本发明属于机器人领域。
权利要求
1.一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:它包括机器人主躯干、机器人左前肢、机器人右前肢、机器人左后肢、机器人右后肢、气动系统和电气控制系统;机器人主躯干包括流线型上壳体(1)、下壳体(2)和多个主体躯干卡扣(6),上壳体(1)和下壳体(2)通过多个主体躯干卡扣(6)密封安装于一体,机器人左前肢和机器人右前肢分别对称安装在机器人主躯干前端的两侧,机器人左后肢和机器人右后肢分别对称安装在器人主躯干后端的两侧,气动系统和电气控制系统安装在流线型上壳体(1)和下壳体(2)之间,电气控制系统与气动系统连接,气动系统与机器人左前肢、机器人右前肢、机器人左后肢和机器人右后肢连通。
2.根据权利要求1所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:机器人左前肢包括左前肢躯干连接件(3-1)、左前肢脚蹼(4-1)和左前肢关节(5-1);机器人右前肢包括右前肢躯干连接件(3-2)、右前肢脚蹼(4-2)和右前肢关节(5-2);左前肢关节(5-1)的一端通过左前肢躯干连接件(3-1)固定安装在机器人主躯干前端的左侧,左前肢关节(5-1)的另一端与左前肢脚蹼(4-1)的一端固定连接,右前肢关节(5-2)的一端通过右前肢躯干连接件(3-2)固定安装在机器人主躯干前端的右侧,右前肢关节(5-2)的另一端与右前肢脚蹼(4-2)的一端固定连接。
3.根据权利要求1所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:机器人左后肢包括左后肢躯干连接件(7-1)、左后肢髋关节(8-1)、左后肢大腿本体(9-1)、左后肢膝关节(10-1)、左后肢小腿本体(11-1)、左后肢踝关节(12-1)、左后肢动脚蹼(13-1-1)和左后肢定脚蹼(13-1-2);机器人右后肢包括右后肢躯干连接件(7-2)、右后肢髋关节(8-2)、右后肢大腿本体(9-2)、右后肢膝关节(10-2)、右后肢小腿本体(11-2)、右后肢踝关节(12-2)、右后肢动脚蹼(13-2-1)和右后肢定脚蹼(13-2-2);左后肢髋关节(8-1)、左后肢膝关节(10-1)、左后肢踝关节(12-1)、右后肢髋关节(8-2)、右后肢膝关节(10-2)和右后肢踝关节(12-2)均为弯管状结构,左后肢髋关节(8-1)的一端通过左后肢躯干连接件(7-1)固定安装在机器人主躯干后端的左侧,左后肢髋关节(8-1)的另一端与左后肢大腿本体(9-1)的一端固定连接,左后肢大腿本体(9-1)的另一端与左后肢膝关节(10-1)的一端固定连接,左后肢膝关节(10-1)的另一端与左后肢小腿本体(11-1)的一端固定连接,左后肢小腿本体(11-1)的另一端与左后肢踝关节(12-1)的一端固定连接,左后肢踝关节(12-1)的另一端与左后肢定脚蹼(13-1-2)固定连接,左后肢动脚蹼(13-1-1)固定安装在左后肢定脚蹼(13-1-2)上,右后肢髋关节(8-2)的一端通过右后肢躯干连接件(7-2)固定安装在机器人主躯干后端的右侧,右后肢髋关节(8-2)的另一端与右后肢大腿本体(9-2)的一端固定连接,右后肢大腿本体(9-2)的另一端与右后肢膝关节(10-2)的一端固定连接,右后肢膝关节(10-2)的另一端与右后肢小腿本体(11-2)的一端固定连接,右后肢小腿本体(11-2)的另一端与右后肢踝关节(12-2)的一端固定连接,右后肢踝关节(12-2)的另一端与右后肢定脚蹼(13-2-2)固定连接,右后肢动脚蹼(13-2-1)固定安装在右后肢定脚蹼(13-2-2)上。
4.根据权利要求2或3所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:左前肢关节(5-1)、右前肢关节(5-2)、左后肢髋关节(8-1)、左后肢膝关节(10-1)、左后肢踝关节(12-1)、右后肢髋关节(8-2)、右后肢膝关节(10-2)和右后肢踝关节(12-2)的结构均相同,左前肢关节(5-1)包括导气阻塞头(15)、弹性基体(16)、应变限制层(17)、纤维线(18)和密封阻塞头(19),弹性基体(16)弯形管体,弯形管体的截面为正方形,纤维线(18)缠绕在弹性基体(16)上,应变限制层(17)粘接在弹性基体(16)的外弧面上,导气阻塞头(15)安装在弹性基体(16)的一端并与弹性基体(16)密封连通,导气阻塞头(15)上加工有进气口和出气口,密封阻塞头(19)密封安装在弹性基体(16)的另一端上。
5.根据权利要求2所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:左前肢脚蹼(4-1)和右前肢脚蹼(4-2)的结构相同,左前肢脚蹼(4-1)是由尼龙材料制成的扇形板,右前肢脚蹼(4-2)是由尼龙材料制成的扇形板,左前肢脚蹼(4-1)的一端加工有安装座,左前肢脚蹼(4-1)通过安装座安装在左前肢关节(5-1)的一端上,右前肢脚蹼(4-2)的一端加工有安装座,右前肢脚蹼(4-2)通过安装座安装在右前肢关节(5-2)的一端上。
6.根据权利要求2所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:左后肢大腿本体(9-1)、左后肢小腿本体(11-1)、右后肢大腿本体(9-2)和右后肢小腿本体(11-2)结构均相同,左后肢大腿本体(9-1)包括柔性基体(20)、两个仿蛙骨骼件(21)和多个骨骼关节连接件(22),两个仿蛙骨骼件(21)设置在柔性基体(20)上,且仿蛙骨骼件(21)的两端通过两个骨骼关节连接件(22)安装在柔性基体(20)上。柔性基体(20)是由橡胶材料制成的柔性基体,仿蛙骨骼件(21)是由尼龙材料制成的仿蛙骨骼件,骨骼关节连接件(22)是由尼龙材料制成的骨骼关节连接件。
7.根据权利要求2所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:左后肢动脚蹼(13-1-1)和右后肢动脚蹼(13-2-1)的结构相同,左后肢定脚蹼(13-1-2)和右后肢定脚蹼(13-2-2)的结构相同,左后肢动脚蹼(13-1-1)是由胶片材料制成的扇形板,左后肢定脚蹼(13-1-2)是由胶片材料制成的扇形框体,扇形框体的一端加工有安装座,左后肢动脚蹼(13-1-1)的一端靠近安装座固定粘贴在左后肢定脚蹼(13-1-2)上,且左后肢动脚蹼(13-1-1)的一端粘贴覆盖在左后肢定脚蹼(13-1-2)的空心处。
8.根据权利要求1所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:它还包括密封垫(14),主体躯干卡扣(6)包括卡扣(6-1)和卡件(6-2),卡件(6-2)固定安装在下壳体(2)上,卡扣(6-1)固定安装在流线型上壳体(1)上,卡扣(6-1)安装在卡件(6-2)上,密封垫(14)设置在流线型上壳体(1)和下壳体(2)之间,流线型上壳体(1)和下壳体(2)通过密封垫(14)密封。
9.根据权利要求1所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,其特征在于:气动系统包括气瓶支架(23)、微小型二氧化碳气瓶(24)、手动开关阀(25)、主控单元(27)、锂电池(28)和多个两位两通电磁开关阀(26);主控单元(27)、锂电池(28)和气瓶支架(23)固定安装在下壳体(2)上,微小型二氧化碳气瓶(24)安装在气瓶支架(23)上,微小型二氧化碳气瓶(24)的出气端安装有手动开关阀(25),左前肢关节(5-1)、右前肢关节(5-2)、左后肢髋关节(8-1)、左后肢膝关节(10-1)、左后肢踝关节(12-1)、右后肢髋关节(8-2)、右后肢膝关节(10-2)和右后肢踝关节(12-2)上每个关节的进气口通过进气管与微小型二氧化碳气瓶(24)的出气端连通,且每个进气管上安装有一个两位两通电磁开关阀(26),左前肢关节(5-1)、右前肢关节(5-2)、左后肢髋关节(8-1)、左后肢膝关节(10-1)、左后肢踝关节(12-1)、右后肢髋关节(8-2)、右后肢膝关节(10-2)和右后肢踝关节(12-2)上每个关节的出气口通过出气管与流线型上壳体(1)的外部空气连通,且每个出气管上安装有一个两位两通电磁开关阀(26),多个两位两通电磁开关阀(26)和锂电池(28)均与主控单元(27)连接。
说明书
技术领域
本发明涉及一种仿蛙游动机器人,具体涉及一种基于关节式气动软体致动器驱动的仿蛙游动机器人,属于机器人领域。
本发明涉及仿生机器人领域,尤其是以滑动推进方式运动的仿生游动机器人领域,通过使用刚、柔、软材料,采用3D打印、模塑成型、粘合加工技术,使得本体机构融合刚、柔、软材料的共同特性,即在保证足够的承载能力和韧性,减轻机器人本体的重量,增强机器人的环境适应性的同时,使得机器人本体结构更加紧凑。并且主体躯干的流线型和后肢脚蹼的单向推水特性有助于减少机器人运动阻力,提高了机器人的机动性。
背景技术
水下机器人一直是机器人领域的研究热点,其对人类开发和利用海洋资源、辅助人类完成水质勘探、完成军事侦查等任务具有重要的意义。传统刚性机器人可实现高效、精准的动作,而软体机器人则是具备较强的环境适应性和人机交互安全性,因此结合刚性机器人和软体机器人的共同优势,研制一种具有刚柔软特性的机器人本体有助于弥补各自缺陷、发挥各自优势。青蛙是一种典型的两栖动物,体形小巧,重量轻,具有复杂的骨骼肌结构。后肢强健,后肢长度在青蛙整个体长中占据的比例较大,使得其运动具有较强的爆发性。并且青蛙的躯干和肢体相对扁平,具有流线型,可以减少在水中游动时的阻力,同时其趾间有蹼,脚蹼面积较大,极大程度的增加了其游动时的推水面积。青蛙的生物学结构极其灵巧,是生物界首屈一指的以推进方式运行的游泳健将。综上所述,结合刚、柔、软材料各自优势,以青蛙作为研究对象,研制一台仿生游动机器人具有很大的现实意义和研究价值。
目前,仿蛙游动机器人本体机构的设计主要以刚性材料为主,其承载能力和运动精度较高,但结构较为复杂,体积和重量偏大,难以实现机器的轻量化和小型化。本体结构不易实现流线型,推进过程受到阻力较大,大大降低了机器人运行过程的机动性,并且密封性不佳,易发生透水现象。
发明内容
本发明为解决现有技术中仿蛙游动机器人本体机构的设计主要以刚性材料为主,其承载能力和运动精度较高,结构复杂,体积和重量偏大,难以实现机器的轻量化和小型化,推进过程受到阻力较大,降低了机器人运行过程的机动性,并且密封性不佳,易发生透水现象的问题,进而提供一种基于关节式气动软体致动器驱动的仿蛙游动机器人。
本发明为解决上述技术问题采取的技术方案是:它包括机器人主躯干、机器人左前肢、机器人右前肢、机器人左后肢、机器人右后肢、气动系统和电气控制系统;机器人主躯干包括流线型上壳体、下壳体和多个主体躯干卡扣,上壳体和下壳体通过多个主体躯干卡扣密封安装于一体,机器人左前肢和机器人右前肢分别对称安装在机器人主躯干前端的两侧,机器人左后肢和机器人右后肢分别对称安装在器人主躯干后端的两侧,气动系统和电气控制系统安装在流线型上壳体和下壳体之间,电气控制系统与气动系统连接,气动系统与机器人左前肢、机器人右前肢、机器人左后肢和机器人右后肢连通。
本发明的有益效果是:
一、本发明提出了一种基于关节式气动软体致动器驱动的仿蛙游动的机器人,机器人本体机构采用刚、柔、软材料融合制成,具有刚、柔、软材料共同优势,在保证肢体承载能力的同时,增强了其环境适应性。
二、本发明采用自主研发的关节式气动软体致动器作为机载驱动单元,其大大简化了肢体机构,使得肢体结构更加紧凑、轻量。
三、本发明提出了一种新型的后肢脚蹼结构形式,其具有单向推水特性,有助于减少机器人运动阻力,提高了机器人的机动性。
四、本发明结构紧凑、体积小、重量轻、运行时阻力小、密封性好、加工简便、成本低。
五、所述后肢脚蹼由动脚蹼和定脚蹼采用粘合的方式组成,能在肢体推进运动时保证足够的推水面积,在肢体恢复阶段减小推水面积,从而使得机器人在推进运动时具有良好的动力,在恢复阶段减少由后肢脚蹼引起的阻力。
附图说明
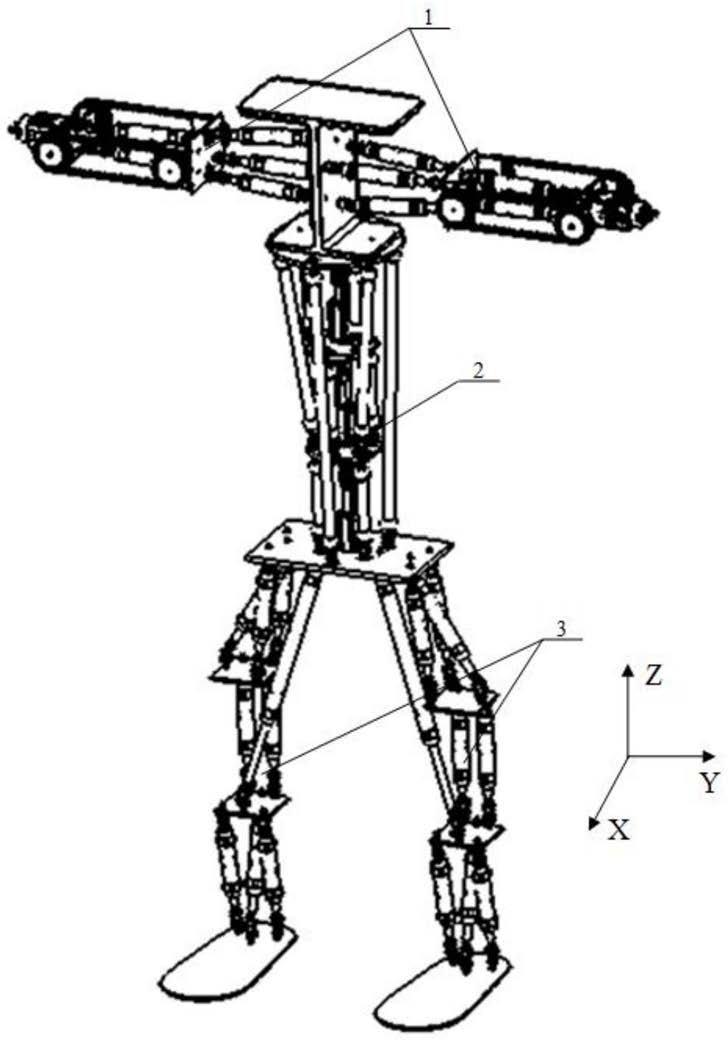
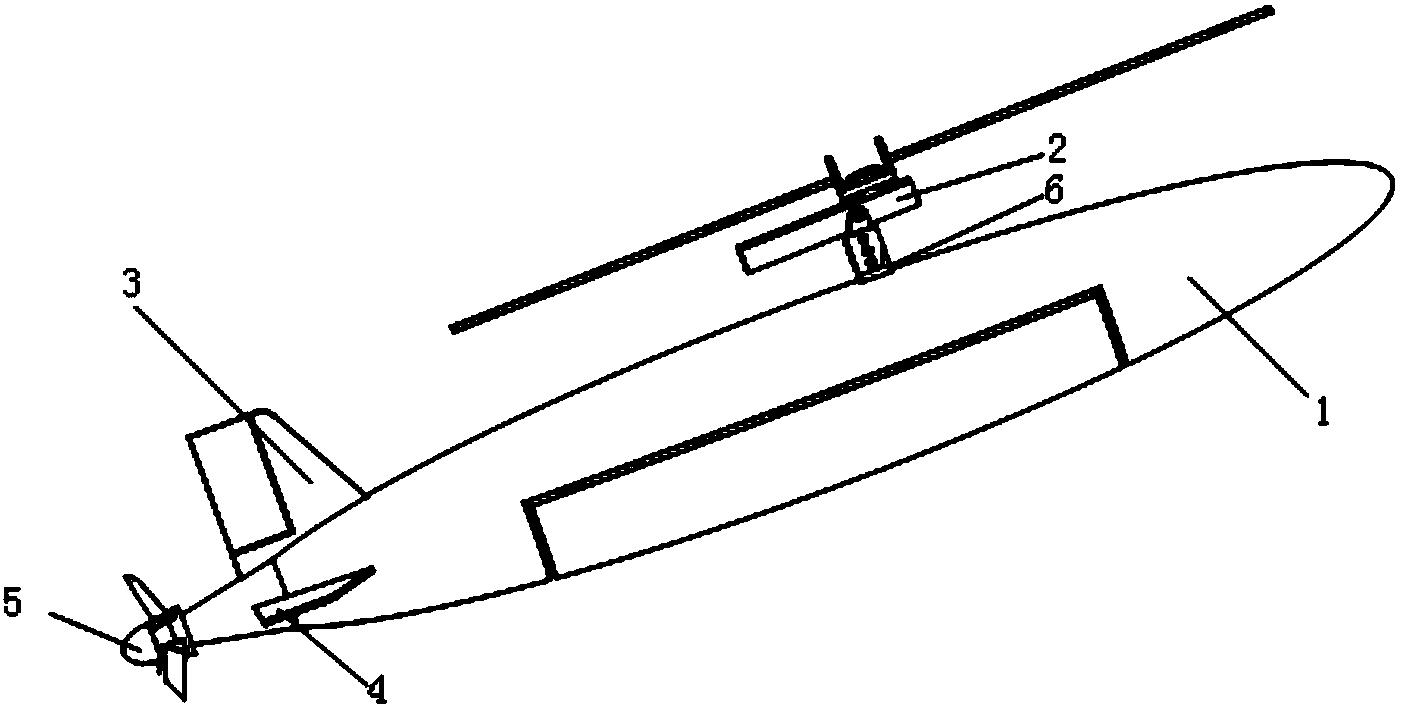
图1是本发明的整体结构示意图。
图2是机器人右后肢的结构示意图。
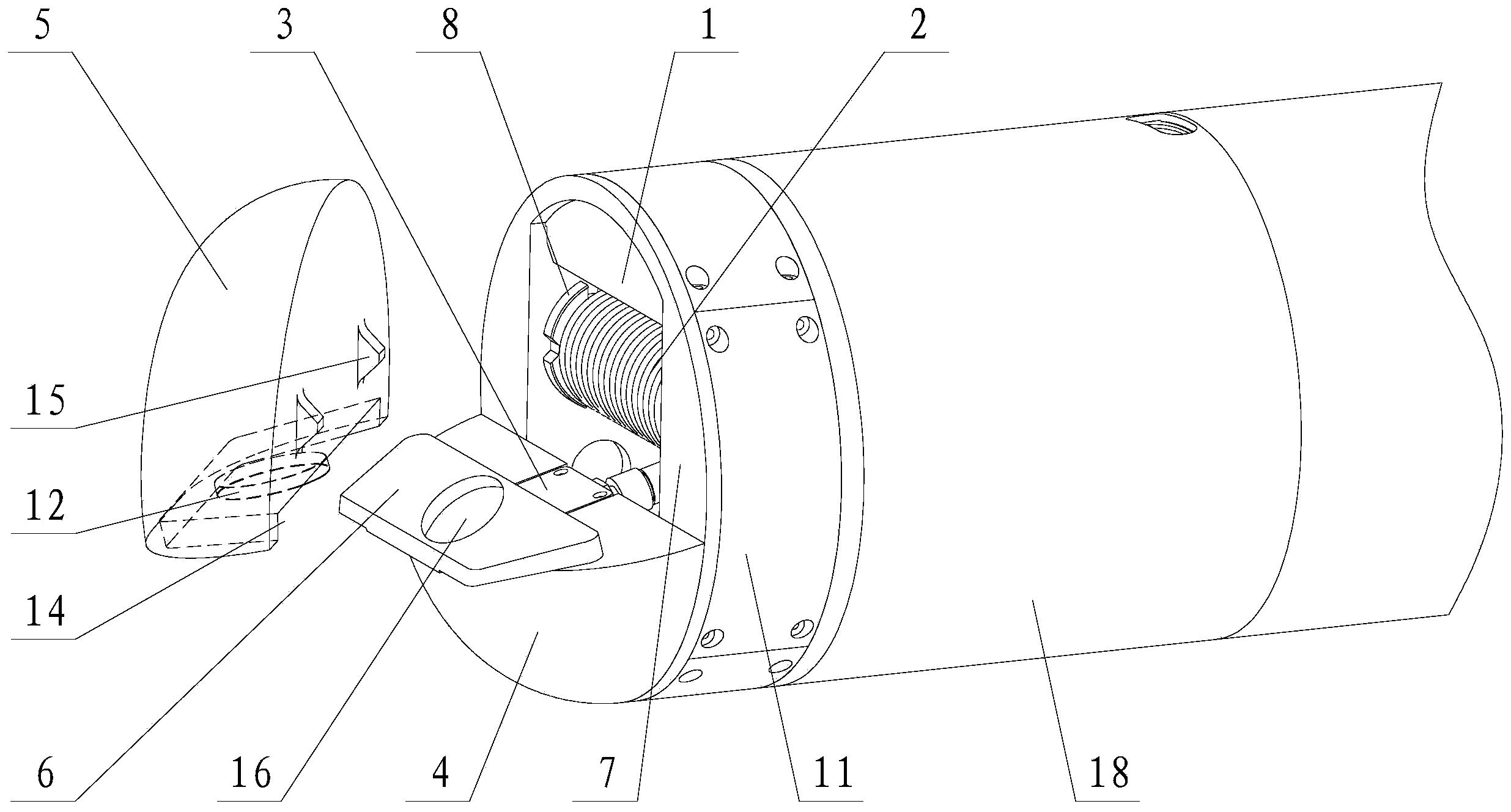
图3是流线型上壳体1和下壳体2扣合前示意图。
图4是左前肢关节5-1的结构示意图。
图5是机器人右后肢伸展和收回的结构示意图。
图6是右后肢动脚蹼13-2-1和右后肢定脚蹼13-2-2安装示意图。
图7是气动系统和电气控制系统安装在下壳体2的示意图。
图8是左前肢关节5-1、右前肢关节5-2、左后肢髋关节8-1、左后肢膝关节10-1、左后肢踝关节12-1、右后肢髋关节8-2、右后肢膝关节10-2和右后肢踝关节12-2上每个关节的进气管和出气管气动回路原理简图。
具体实施方式
具体实施方式一:结合图1-图8说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,它包括机器人主躯干、机器人左前肢、机器人右前肢、机器人左后肢、机器人右后肢、气动系统和电气控制系统;机器人主躯干包括流线型上壳体1、下壳体2和多个主体躯干卡扣6,流线型上壳体1和下壳体2通过多个主体躯干卡扣6密封安装于一体,机器人左前肢和机器人右前肢分别对称安装在机器人主躯干前端的两侧,机器人左后肢和机器人右后肢分别对称安装在器人主躯干后端的两侧,气动系统和电气控制系统安装在流线型上壳体1和下壳体2之间,电气控制系统与气动系统连接,气动系统与机器人左前肢、机器人右前肢、机器人左后肢和机器人右后肢连通。
本实施方式中,流线型上壳体1和下壳体2减小机器人推进过程中的阻力,同时用于连接机器人左前肢、机器人右前肢、机器人左后肢和机器人右后肢,放置机器人气动系统和电气控制系统并为机器人提供一定的浮力。
具体实施方式二:结合图1说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,机器人左前肢包括左前肢躯干连接件3-1、左前肢脚蹼4-1和左前肢关节5-1;机器人右前肢包括右前肢躯干连接件3-2、右前肢脚蹼4-2和右前肢关节5-2;左前肢关节5-1的一端通过左前肢躯干连接件3-1固定安装在机器人主躯干前端的左侧,左前肢关节5-1的另一端与左前肢脚蹼4-1的一端固定连接,右前肢关节5-2的一端通过右前肢躯干连接件3-2固定安装在机器人主躯干前端的右侧,右前肢关节5-2的另一端与右前肢脚蹼4-2的一端固定连接。其它组成和连接方式与具体实施方式一相同。
具体实施方式三:结合图1-图5说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,机器人左后肢包括左后肢躯干连接件7-1、左后肢髋关节8-1、左后肢大腿本体9-1、左后肢膝关节10-1、左后肢小腿本体11-1、左后肢踝关节12-1、左后肢动脚蹼13-1-1和左后肢定脚蹼13-1-2;机器人右后肢包括右后肢躯干连接件7-2、右后肢髋关节8-2、右后肢大腿本体9-2、右后肢膝关节10-2、右后肢小腿本体11-2、右后肢踝关节12-2、右后肢动脚蹼13-2-1和右后肢定脚蹼13-2-2;左后肢髋关节8-1、左后肢膝关节10-1、左后肢踝关节12-1、右后肢髋关节8-2、右后肢膝关节10-2和右后肢踝关节12-2均为弯管状结构,左后肢髋关节8-1的一端通过左后肢躯干连接件7-1固定安装在机器人主躯干后端的左侧,左后肢髋关节8-1的另一端与左后肢大腿本体9-1的一端固定连接,左后肢大腿本体9-1的另一端与左后肢膝关节10-1的一端固定连接,左后肢膝关节10-1的另一端与左后肢小腿本体11-1的一端固定连接,左后肢小腿本体11-1的另一端与左后肢踝关节12-1的一端固定连接,左后肢踝关节12-1的另一端与左后肢定脚蹼13-1-2固定连接,左后肢动脚蹼13-1-1固定安装在左后肢定脚蹼13-1-2上,右后肢髋关节8-2的一端通过右后肢躯干连接件7-2固定安装在机器人主躯干后端的右侧,右后肢髋关节8-2的另一端与右后肢大腿本体9-2的一端固定连接,右后肢大腿本体9-2的另一端与右后肢膝关节10-2的一端固定连接,右后肢膝关节10-2的另一端与右后肢小腿本体11-2的一端固定连接,右后肢小腿本体11-2的另一端与右后肢踝关节12-2的一端固定连接,右后肢踝关节12-2的另一端与右后肢定脚蹼13-2-2固定连接,右后肢动脚蹼13-2-1固定安装在右后肢定脚蹼13-2-2上。其它组成和连接方式与具体实施方式一相同。
具体实施方式四:结合图1-图5说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,左前肢关节5-1、右前肢关节5-2、左后肢髋关节8-1、左后肢膝关节10-1、左后肢踝关节12-1、右后肢髋关节8-2、右后肢膝关节10-2和右后肢踝关节12-2的结构均相同,左前肢关节5-1包括导气阻塞头15、弹性基体16、应变限制层17、纤维线18和密封阻塞头19,弹性基体16弯形管体,弯形管体的截面为正方形,纤维线18缠绕在弹性基体16的上,应变限制层17粘接在弹性基体16的外弧面上,导气阻塞头15安装在弹性基体16的一端并与弹性基体16密封连通,导气阻塞头15上加工有进气口和出气口,密封阻塞头19密封安装在弹性基体16的另一端上。弹性基体16和应变限制层17均是柔、软材料制成的驱动单元,本实施方式的结构简化了机器人肢体结构,减轻机器人本体的体积和重量负担,利用不同材料的应变差在充入气压时产生由弯曲到伸直的运动形式,带动机器人肢体和脚蹼产生伸展运动和游动时的推力。通过各个关节式气动软体致动器的协调运动,带动机器人肢体和脚蹼产生伸展运动和游动时的推进力,进而实现机器人的前进与转向运动,其它组成和连接方式与具体实施方式一相同。
具体实施方式五:结合图1说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,左前肢脚蹼4-1和右前肢脚蹼4-2的结构相同,左前肢脚蹼4-1是由尼龙材料制成的扇形板,右前肢脚蹼4-2是由尼龙材料制成的扇形板,左前肢脚蹼4-1的一端加工有安装座,左前肢脚蹼4-1通过安装座安装在左前肢关节5-1的一端上,右前肢脚蹼4-2的一端加工有安装座,右前肢脚蹼4-2通过安装座安装在右前肢关节5-2的一端上。其它组成和连接方式与具体实施方式一相同。
具体实施方式六:结合图1-图5说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,左后肢大腿本体9-1、左后肢小腿本体11-1、右后肢大腿本体9-2和右后肢小腿本体11-2结构均相同,左后肢大腿本体9-1包括柔性基体20、两个仿蛙骨骼件21和多个骨骼关节连接件22,两个仿蛙骨骼件21设置在柔性基体20上,且仿蛙骨骼件21的两端通过两个骨骼关节连接件22安装在柔性基体20上。柔性基体20是由橡胶材料制成的柔性基体,在保证其具有一定的承载能力的同时,使得大、小腿能更好的与关节式气动软体制动器紧密粘贴,仿蛙骨骼件21是由尼龙材料制成的仿蛙骨骼件,骨骼关节连接件22是由尼龙材料制成的骨骼关节连接件。其它组成和连接方式与具体实施方式一相同。
具体实施方式七:结合图1和图6说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,左后肢动脚蹼13-1-1和右后肢动脚蹼13-2-1的结构相同,左后肢定脚蹼13-1-2和右后肢定脚蹼13-2-2的结构相同,左后肢动脚蹼13-1-1是由胶片材料制成的扇形板,左后肢定脚蹼13-1-2是由胶片材料制成的扇形框体,扇形框体的一端加工有安装座,左后肢动脚蹼13-1-1的一端靠近安装座固定粘贴在左后肢定脚蹼13-1-2上,且左后肢动脚蹼13-1-1的一端粘贴覆盖在左后肢定脚蹼13-1-2的空心处。能在肢体推进运动时保证足够的推水面积,在肢体恢复阶段减小推水面积,从而使得机器人在推进运动时具有良好的动力,在恢复阶段减少由后肢脚蹼引起的阻力,其它组成和连接方式与具体实施方式一相同。
具体实施方式八:结合图1说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,它还包括密封垫14,主体躯干卡扣6包括卡扣6-1和卡件6-2,卡件6-2固定安装在下壳体2上,卡扣6-1固定安装在流线型上壳体1上,卡扣6-1安装在卡件6-2上,密封垫14设置在流线型上壳体1和下壳体2之间,流线型上壳体1和下壳体2通过密封垫14密封。流线型上壳体1和下壳体2采用主体躯干卡扣6紧固连接,线型上壳体1和下壳体2接合处加入密封条14,卡扣紧固后,使用密封剂密封以防止接合处漏水。其它组成和连接方式与具体实施方式一相同。
具体实施方式九:结合图7和图8说明本实施方式,本实施方式所述一种基于关节式气动软体致动器驱动的仿蛙游动机器人,气动系统包括气瓶支架23、微小型二氧化碳气瓶24、手动开关阀25、主控单元27、锂电池28和多个两位两通电磁开关阀26;主控单元27、锂电池28和气瓶支架23固定安装在下壳体2上,微小型二氧化碳气瓶24安装在气瓶支架23上,微小型二氧化碳气瓶24的出气端安装有手动开关阀25,左前肢关节5-1、右前肢关节5-2、左后肢髋关节8-1、左后肢膝关节10-1、左后肢踝关节12-1、右后肢髋关节8-2、右后肢膝关节10-2和右后肢踝关节12-2上每个关节的进气口通过进气管与微小型二氧化碳气瓶24的出气端连通,且每个进气管上安装有一个两位两通电磁开关阀26,左前肢关节5-1、右前肢关节5-2、左后肢髋关节8-1、左后肢膝关节10-1、左后肢踝关节12-1、右后肢髋关节8-2、右后肢膝关节10-2和右后肢踝关节12-2上每个关节的出气口通过出气管与流线型上壳体1的外部空气连通,且每个出气管上安装有一个两位两通电磁开关阀26,多个两位两通电磁开关阀26和锂电池28均与主控单元27连接。左前肢关节5-1、右前肢关节5-2、左后肢髋关节8-1、左后肢膝关节10-1、左后肢踝关节12-1、右后肢髋关节8-2、右后肢膝关节10-2和右后肢踝关节12-2上的每个关节均由两个两位两通电磁开关阀26控制通、排气,主控单元27根据控制需要,控制两位两通电磁开关阀26的开启和关闭,实现机器人各关节的协调运动控制,进而实现仿蛙机器人的仿生游动。其它组成和连接方式与具体实施方式一相同。
一种基于关节式气动软体致动器驱动的仿蛙游动机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0