









专利摘要
本发明公开了一种水下航行器的仿生推进装置,其包括航行器主体、航行器内的控制及驱动系统和仿生推进装置,两个仿生推进装置为一组,每组仿生推进装置以航行器主体中轴线为对称轴左右对称布置,仿生推进装置通过固定轴安装于航行器主体底部。本发明可实现水下航行器前进、后退、转弯、悬停运动,结构简单,噪音小,产生的推力大,回程行程能量损失少,较其它鱼类的推进方式控制简单,易于实现。
权利要求
1.一种水下航行器的仿生推进装置,其特征在于:包括航行器主体(1)、航行器内的控制及驱动系统和仿生推进装置,两个仿生推进装置为一组,每组仿生推进装置以航行器主体中轴线为对称轴左右对称布置,仿生推进装置通过固定轴(9)安装于航行器主体(1)底部,仿生推进装置包括桨叶(2)、桨轴(3)、转盘(4)、转盘底座(5)、T型轴(6)、软轴(7)、摆动杆(8)、滑块(10)、伸缩机构(11)和导槽(12);
伸缩机构(11)固定于航行器主体(1)上,通过航行器内的控制及驱动系统实现前后伸缩,伸缩机构(11)通过滑块(10)与摆动杆(8)相连,摆动杆(8)的一端设有导槽(12),摆动杆(8)在1/3-1/2之间的任一位置通过固定轴(9)安装于航行器主体(1)上,摆动杆(8)能绕固定轴(9)相对转动,伸缩机构(11)前后伸缩过程中滑块(10)在导槽(12)内滑动,推动摆动杆(8)绕固定轴(9)前后摆动,摆动杆(8)的末端开有矩形凹槽,T型轴(6)安装在矩形凹槽处,通过软轴(7)传动实现转动,软轴(7)一端连接T型轴(6),软轴(7)另一端连接安装于航行器内的控制及驱动系统,转盘底座(5)安装于T型轴(6)末端,转盘(4)上安装桨叶(2),转盘底座(5)内部的驱动系统驱动转盘(4)转动。
2.根据权利要求1所述的一种水下航行器的仿生推进装置,其特征在于:所述转盘(4)及T型轴(6)能实现先后转动,或者同时转动,转动角度范围为0~90°。
3.根据权利要求1所述的一种水下航行器的仿生推进装置,其特征在于:所述摆动杆(8)摆动角度范围为0~90°。
4.根据权利要求1所述的一种水下航行器的仿生推进装置,其特征在于:所述桨叶(2)为刚性平板桨或翼型桨。
5.根据权利要求1所述的一种水下航行器的仿生推进装置,其特征在于:所述摆动杆(8)为刚性件。
6.根据权利要求1所述的一种水下航行器的仿生推进装置,其特征在于:所述伸缩机构(11)为液压伸缩机构或电动伸缩机构。
说明书
技术领域
本发明涉及一种水下航行器的仿生推进装置,具体涉及一种水下航行器桨式推进装置,属于水下航行器推进技术领域。
背景技术
水下航行器在海洋资源的开发与保护、海洋地形勘测、军事活动、水下救援和捕捞等诸多领域发挥着重要作用,推进器作为水下航行器的动力系统,是水下航行器设计的核心部分。目前,水下航行器大多采用螺旋桨推进器装置,尽管驱动方便,应用比较广泛,但其存在噪声大、结构复杂、桨叶制造工艺复杂、运动灵活性差等缺点,在军事应用领域极易被敌方发现。因此,发展新型驱动方式及驱动装置,是水下航行器研制所面临的重要课题。
自然界中,鱼类、水下昆虫等水生生物经过自然选择和自身进化,具有了独特的游动方式。如水下昆虫中的龙虱,又称潜水甲虫,长有两条粗壮有力的游泳足,其在水中游动时,两条游泳足伸展开,成桨状,依靠划水产生动力,回程阶段,又将桨状部分翻转弯曲,以减少水体产生的阻力;转弯过程中,将一条游泳足保持伸直或弯曲状态,划动另一条游泳足实现灵活转向。此类昆虫具有爆发力强、机动性好、转向灵活、转弯半径小等特点,因此,利用仿生学原理开发研究仿生龙虱水下推进器,提高航行器的隐身性能,具有可实施性。
发明内容
本发明的目的是克服传统螺旋桨推进器的上述不足,受龙虱在水中游动过程中游泳足划水方式的变化启发,提供一种水下航行器的仿生推进装置,本发明是一种可翻转折叠式划水桨水下航行器仿生推进装置。该仿生推进装置结构简单,噪音小,回程行程能量损失少,较其它鱼类的推进方式控制简单,易于实现。
本发明包括航行器主体、航行器内的控制及驱动系统和仿生推进装置,两个仿生推进装置为一组,每组仿生推进装置以航行器主体中轴线为对称轴左右对称布置,推进装置安装位置、安装组数及摆动角度可根据所安装的水下航行器的尺寸和形状进行调整。
仿生推进装置通过固定轴安装于航行器主体底部,仿生推进装置包括桨叶、桨轴、转盘、转盘底座、T型轴、软轴、摆动杆、滑块、伸缩机构和导槽;伸缩机构固定于航行器主体上,通过航行器内的控制及驱动系统实现前后伸缩,伸缩机构通过滑块与摆动杆相连,摆动杆的一端设有导槽,摆动杆在1/3-1/2之间的任一位置通过固定轴安装于航行器主体上,摆动杆能绕固定轴相对转动,伸缩机构前后伸缩过程中滑块在导槽内滑动,推动摆动杆绕固定轴前后摆动,摆动杆的末端开有矩形凹槽,T型轴安装在矩形凹槽处,通过软轴传动实现转动,软轴一端连接T型轴,软轴另一端连接安装于航行器内的控制及驱动系统,转盘底座安装于T型轴末端,转盘上安装桨叶,转盘底座内部的驱动系统驱动转盘转动。
所述转盘及T型轴能实现先后转动,或者同时转动,转动角度范围为0~90°。
所述摆动杆摆动角度范围为0~90°。
所述桨叶为刚性平板桨或翼型桨。
所述摆动杆为刚性件。
所述伸缩机构为液压伸缩机构或电动伸缩机构。
本发明的有益效果:
本发明可实现水下航行器前进、后退、转弯、悬停运动,结构简单,运动灵活,噪音小,回程行程能量损失少,转弯半径小,控制简单,易于实现。
附图说明
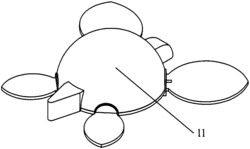
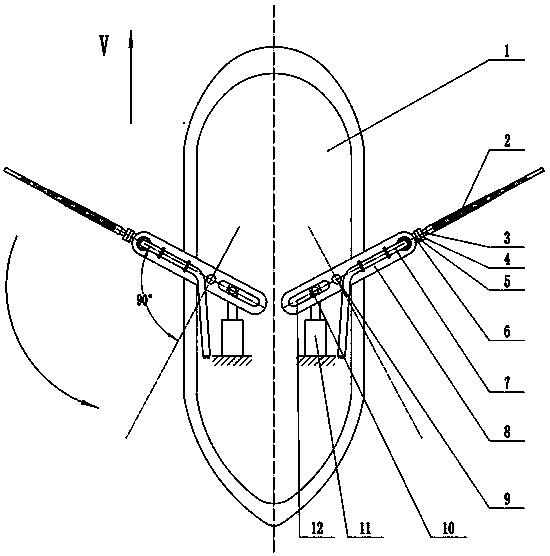
图1为本发明的仰视图,是在直线前行推进行程的工作示意图,图中所标速度方向为航行器前进方向,而非水的流向。
图2为本发明在直线前行回程行程的工作示意图。
图3为本发明在向左转弯时的工作示意图。
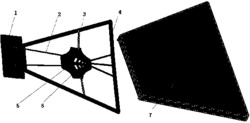
图4为本发明的摆动杆末端T型轴及转盘装置主视图。
图5为本发明的摆动杆末端T型轴及转盘装置俯视图。
图中:1-航行器主体;2-桨叶;3-桨轴;4-转盘;5-底座;6-T型轴;7-软轴;8-摆动杆;9-固定轴;10-滑块;11-伸缩机构;12-导槽。
具体实施方式
参阅图1、图2、图3、图4和图5所示,本发明包括航行器主体1、航行器内的控制及驱动系统和仿生推进装置,两个仿生推进装置为一组,每组仿生推进装置以航行器主体中轴线为对称轴左右对称布置,推进装置安装位置、安装组数及摆动角度可根据所安装的水下航行器的尺寸和形状进行调整。在本实施例中,以一组仿生推进装置为例进行说明,仿生推进装置通过固定轴9安装于航行器主体1底部,仿生推进装置包括桨叶2、桨轴3、转盘4、转盘底座5、T型轴6、软轴7、摆动杆8、滑块10、伸缩机构11和导槽12;
伸缩机构11固定于航行器主体1上,通过航行器内的控制及驱动系统实现前后伸缩,伸缩机构11通过滑块10与摆动杆8相连,摆动杆8的一端设有导槽12,摆动杆8在1/3-1/2之间的任一位置通过固定轴9安装于航行器主体1上,摆动杆8能绕固定轴9相对转动,伸缩机构11前后伸缩过程中滑块10在导槽12内滑动,推动摆动杆8绕固定轴9前后摆动,摆动杆8的末端开有矩形凹槽,T型轴6安装在矩形凹槽处,通过软轴7传动实现转动,软轴7一端连接T型轴6,软轴7另一端连接安装于航行器内的控制及驱动系统,转盘底座5安装于T型轴6末端,转盘4上安装桨叶2,转盘底座5内部的驱动系统驱动转盘4转动。
所述转盘4及T型轴6能实现先后转动,或者同时转动,转动角度范围为0~90°。
所述摆动杆8摆动角度范围为0~90°。
所述桨叶2为刚性平板桨或翼型桨。
所述摆动杆8为刚性件。
所述伸缩机构11为液压伸缩机构或电动伸缩机构。
所述的航行器内的控制及驱动系统和转盘底座5内部的驱动系统是现有技术,其具体结构不再赘述。
本发明的工作过程和原理:
所述左右两侧仿生推进装置的运动可以独立控制,也可以统一控制;两只桨叶2的运动可以是对称的(前进、后退或悬停),也可以是不对称的(转弯);摆动杆8平行于航行器主体1底部正投影平面。直线前进或后退过程中,左右两侧仿生推进装置运动同步,两侧对称,伸缩机构11伸缩一次为一个运动周期,即摆动杆8前后摆动一次。
直线前进运动时,如图1所示,初始位置,桨叶2垂直于航行器主体1底部正投影平面,呈伸展状态,其轴线与摆动杆8轴线在一条直线上,伸缩机构11伸长,滑块10在导槽12内滑动,推动摆动杆8绕固定轴9摆动,此过程中桨叶2与摆动杆8保持相对静止,随摆动杆8一起向后摆动,水的反作用力推动航行器向前直线行进。当伸缩机构11伸长到一定长度,摆动杆8向后摆动角度达到90°时,直线前进运动一个运动周期内的推进行程结束;回程行程开始,伸缩机构11缩短,摆动杆8带动桨叶2向前摆动,与此同时,转盘4在安装于底座内的驱动及控制系统的驱动及控制下绕其轴线顺时针(或逆时针)旋转90°,桨叶2平面由垂直于航行器主体1底部正投影平面转为平行于航行器主体1底部正投影平面,T型轴6通过软轴7传动旋转90°,使桨叶2向后折叠,其轴线与摆动杆8轴线夹角成90°,转盘4及T型轴6可以通过控制系统实现先后转动,或者同时转动,如图2所示,此种方式可以减小桨叶2在回程行程中的水体阻力,提高推进效率。伸缩机构11收缩到一定长度,驱动摆动杆8摆回到初始位置,转盘4及T型轴6分别绕其旋转轴线转回90°,使桨叶2向外伸展开,其轴线与摆动杆8的轴线回到一条直线上,桨叶2平面垂直于航行器主体1底部正投影平面,一个运动周期结束,下一运动周期开始,以此循环往复,实现直线前进运动。同理,该水下航行器仿生推进器可实现直线后退运动。
水下航行器向左转弯时,如图3所示,左侧仿生推进装置的转盘4绕其轴线顺时针(或逆时针)转动90°,桨叶2平面平行于航行器主体1底部正投影平面,以减少所受水体阻力,划水桨轴线与摆动杆8轴线保持在一条直线上,与航行器主体1轴线成任意角度保持不动,以维持航行器的稳定性;右侧仿生推进装置伸缩机构11伸长,滑块10在导槽12内滑动,驱动摆动杆8向后摆动,划水桨随摆动杆8一起运动,其桨叶2平面垂直于航行器主体1底部正投影平面,水下航行器受右侧产生的推力,实现向左转弯。同理,该水下航行器仿生推进器可实现向右转弯运动。
两侧仿生推进装置摆动杆8及划水桨轴线保持在同一直线上,桨叶2平面平行于航行器主体1底部正投影平面,维持静止状态不动,实现航行器的悬停。
一种水下航行器的仿生推进装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0