









专利摘要
本发明公开了一种变旋翼转速直升机的控制方法,所述变旋翼转速直升机具有连续无级变速传动机构以及动力涡轮转速可变的涡轴发动机;首先根据大气环境、前飞速度、旋翼转速计算出直升机需求功率;然后根据所述直升机需求功率计算涡轴发动机在一定动力涡轮转速条件下的发动机性能参数;最后,以所述发动机性能参数作为初猜值,以变速分配因子为优化变量,对所述变旋翼转速直升机的直升机/发动机综合系统性能计算模型进行优化求解,并按照求解得到的最优变速分配因子对连续无级变速传动机构和动力涡轮进行控制。本发明还公开了一种变旋翼转速直升机的控制装置。本发明可同时获得最优旋翼转速及动力涡轮转速,显著改善直升机/发动机系统的综合性能。
权利要求
1.一种变旋翼转速直升机的控制方法,所述变旋翼转速直升机具有连续无级变速传动机构以及动力涡轮转速可变的涡轴发动机;其特征在于,首先根据大气环境、前飞速度、旋翼转速,使用以下的简化模型计算直升机需求功率P
P
P
其中,P
2.如权利要求1所述变旋翼转速直升机的控制方法,其特征在于,所述优化求解是以发动机燃油消耗最低为优化目标。
3.如权利要求1所述变旋翼转速直升机的控制方法,其特征在于,所述优化求解的约束条件包括:涡轴发动机不超转、不进喘、不超温,输出扭矩不超限;主旋翼的桨叶载荷满足最优桨叶载荷操作边界约束;变速分配因子n
4.如权利要求1所述变旋翼转速直升机的控制方法,其特征在于,使用序列二次规划算法进行优化求解。
5.一种变旋翼转速直升机的控制装置,所述变旋翼转速直升机具有连续无级变速传动机构以及动力涡轮转速可变的涡轴发动机;其特征在于,该控制装置包括:
涡轴发动机性能计算模型,用于根据大气环境、前飞速度、旋翼转速,用以下的简化模型计算直升机需求功率P
P
P
其中,P
直升机需求功率性能计算模型,用于根据涡轴发动机性能计算模型输出的直升机需求功率计算涡轴发动机在一定动力涡轮转速条件下的发动机性能参数;
优化算法模型,用于以所述发动机性能参数作为初猜值,以变速分配因子n
6.如权利要求5所述变旋翼转速直升机的控制装置,其特征在于,所述优化求解是以发动机燃油消耗最低为优化目标。
7.如权利要求5所述变旋翼转速直升机的控制装置,其特征在于,所述优化求解的约束条件包括:涡轴发动机不超转、不进喘、不超温,输出扭矩不超限;主旋翼的桨叶载荷满足最优桨叶载荷操作边界约束;变速分配因子n
8.如权利要求5所述变旋翼转速直升机的控制装置,其特征在于,优化算法模型使用序列二次规划算法进行优化求解。
说明书
技术领域
本发明涉及一种直升机控制方法,尤其涉及一种变旋翼转速直升机的控制方法,属于航空宇航推进理论与工程中的系统控制、优化与仿真技术领域。
背景技术
近年来,降低发动机废气排放与燃油消耗的要求越来越高[Goulos I,PachidisV,Dippolito R,et al.An Integrated Approach for the Multidisciplinary Designof Optimum Rotorcraft Operations[J]]。对于直升机而言,采用变旋翼转速技术可以有效降低涡轴发动机的油耗与废气排放。然而,考虑到特定的转子转速可能会激起机身部件的固有频率以及发动机的效率在相对较窄的转速范围内最优,现代涡轴发动机基本围绕定转速运行,输出转速允许的变化范围基本不超过15%[Kalinin D V.MultithreadedContinuously Variable Transmission Synthesis for Next-Generation Helicopters[C]]。当涡轴发动机在远离设计点的转速下工作时,动力涡轮的效率是持续下降的,但初步的理论研究表明,主旋翼和发动机的效率随着转速发生变化,间接证实了降低发动机燃油消耗可能性。不同的直升机飞行状态,存在最优的主旋翼转速,使直升机的需求功率最小。而对于涡轴发动机而言,不同的功率负载,对应着一个最优的动力涡轮转速。这两个最优转速通常是不同的,主要取决于直升机子系统与发动机子系统的特性,且随着飞行条件的变化而变化。为了最大程度地降低发动机的燃油消耗,很显然,主旋翼、发动机应该工作于各自的最优转速。然而,目前的直升机通常采用固定传动比的传动装置,造成主旋翼转速严格取决于发动机输出转速,此时,两个子系统难以达到各自最佳的运行状态。
涡轴发动机的动力涡轮通过变速箱、传动轴等组成的传动机构,驱动主旋翼与尾桨。因此,从动力输路径来看,存在两种不同的变速方式:1)变动力涡轮输出转速结合定传动比;2)定动力涡轮输出转速结合变传动比[Amri H,Feil R,Hajek M,etal.Possibilities and difficulties for rotorcraft using variable transmissiondrive trains[J]]。NASA[Hendricks E S,Jones S M,Gray J S.Design Optimization ofa Variable-Speed Power-Turbine[C]]应用中线概念设计4级可变动力涡轮,同时包括二维翼型截面和由此产生的三维叶片和叶栅的设计,拓宽了动力涡轮的高效率转速范围,验证了变速动力涡轮的可行性。Litt[Litt J S,Edwards J M,Decastro J A.A SequentialShifting Algorithm for Variable Rotor Speed Control[C]]为了在动力涡轮转速基本保持不变的前提下,大范围内平稳地改变主旋翼转速,提出了一种基于双发配置的序列变速控制算法控制两台发动机的啮合与脱离。然而,仅从功能的角度而言,与离散多级变速的可操作性相比,连续无级变速(CVT)还是可取的,原因之一在于:CVT具有在不同飞行条件下连续获得最优转速的可能性。姚文荣等[姚文荣,宁景涛,张海波.基于无级变速的直升机变旋翼转速控制模拟方法研究[J]]开展了基于无级变速的直升机变旋翼转速控制模拟方法研究,引入无极变速传动系统模型,实现了直升机变旋翼转速过程仿真模拟。上述研究成果或者单一研究采用变动力涡轮转速或变传动比实现变旋翼转速的可行性,或者单一地研究变旋翼转速对涡轴发动机动态响应的影响,而并未从降低发动机油耗的角度,揭示最优旋翼转速或动力涡轮转速的变化规律。
发明内容
本发明所要解决的技术问题在于克服现有技术不足,提供一种变旋翼转速直升机的控制方法,可同时获得最优旋翼转速及最优动力涡轮转速,在调节旋翼转速,降低直升机需求功率的同时,调整动力涡轮转速,使涡轴发动机一直工作于高效率状态,从而显著改善直升机/发动机系统的综合性能。
本发明具体采用以下技术方案解决上述技术问题:
一种变旋翼转速直升机的控制方法,所述变旋翼转速直升机具有连续无级变速传动机构以及动力涡轮转速可变的涡轴发动机;首先根据大气环境、前飞速度、旋翼转速计算出直升机需求功率;然后根据所述直升机需求功率计算涡轴发动机在一定动力涡轮转速条件下的发动机性能参数;最后,以所述发动机性能参数作为初猜值,以变速分配因子nFRT、nCVT为优化变量,对所述变旋翼转速直升机的直升机/发动机综合系统性能计算模型进行优化求解,并按照求解得到的最优变速分配因子对连续无级变速传动机构和动力涡轮进行控制,其中,变速分配因子nFRT表示动力涡轮相对于设计点100%转速的变速比,变速分配因子nCVT表示连续无级变速传动机构的减速比。
优选地,所述优化求解是以发动机燃油消耗最低为优化目标。
优选地,所述优化求解的约束条件包括:涡轴发动机不超转、不进喘、不超温,输出扭矩不超限;主旋翼的桨叶载荷满足最优桨叶载荷操作边界约束;变速分配因子nFRT、nCVT在预设的变化范围内。
优选地,使用以下的简化模型计算直升机需求功率Ph:
Ph=Pmr+Ptr
Pmr=Pi+Po+Pp
其中,Pmr、Ptr分别表示旋翼需求功率、尾桨需求功率;Pi、Po、Pp分别表示旋翼诱导功率、型阻功率以及废阻功率;vitr表示尾桨诱导速度;CD0、 Nmr、Ntr、Rtr分别表示尾桨叶片平均截面阻力系数、尾桨叶片面积、旋翼转速、尾桨转速与尾桨半径;ρ表示大气密度;Ttr表示尾桨拉力;L表示主旋翼轴与尾桨轴之间的距离。
优选地,使用序列二次规划算法进行优化求解。
基于同一发明构思还可以得到以下技术方案:
一种变旋翼转速直升机的控制装置,所述变旋翼转速直升机具有连续无级变速传动机构以及动力涡轮转速可变的涡轴发动机;该控制装置包括:
涡轴发动机性能计算模型,用于根据大气环境、前飞速度、旋翼转速计算出直升机需求功率;
直升机需求功率性能计算模型,用于根据涡轴发动机性能计算模型输出的直升机需求功率计算涡轴发动机在一定动力涡轮转速条件下的发动机性能参数;
优化算法模型,用于以所述发动机性能参数作为初猜值,以变速分配因子nFRT、nCVT为优化变量,对所述变旋翼转速直升机的直升机/发动机综合系统性能计算模型进行优化求解,并按照求解得到的最优变速分配因子对连续无级变速传动机构和动力涡轮进行控制,其中,变速分配因子nFRT表示动力涡轮相对于设计点100%转速的变速比,变速分配因子nCVT表示连续无级变速传动机构的减速比。
优选地,所述优化求解是以发动机燃油消耗最低为优化目标。
优选地,所述优化求解的约束条件包括:涡轴发动机不超转、不进喘、不超温,输出扭矩不超限;主旋翼的桨叶载荷满足最优桨叶载荷操作边界约束;变速分配因子nFRT、nCVT在预设的变化范围内。
优选地,直升机需求功率性能计算模型使用以下的简化模型计算直升机需求功率Ph:
Ph=Pmr+Ptr
Pmr=Pi+Po+Pp
其中,Pmr、Ptr分别表示旋翼需求功率、尾桨需求功率;Pi、Po、Pp分别表示旋翼诱导功率、型阻功率以及废阻功率;vitr表示尾桨诱导速度;CD0、 Nmr、Ntr、Rtr分别表示尾桨叶片平均截面阻力系数、尾桨叶片面积、旋翼转速、尾桨转速与尾桨半径;ρ表示大气密度;Ttr表示尾桨拉力;L表示主旋翼轴与尾桨轴之间的距离。
优选地,优化算法模型使用序列二次规划算法进行优化求解。
相比现有技术,本发明技术方案具有以下有益效果:
本发明技术方案可在不同工况下获得最优的主旋翼与动力涡轮工作转速,在减小直升机需求功率的同时,使涡轴发动机以更高的效率运行,可显著降低发动机的燃油消耗,充分发挥直升机/发动机的综合性能。
附图说明
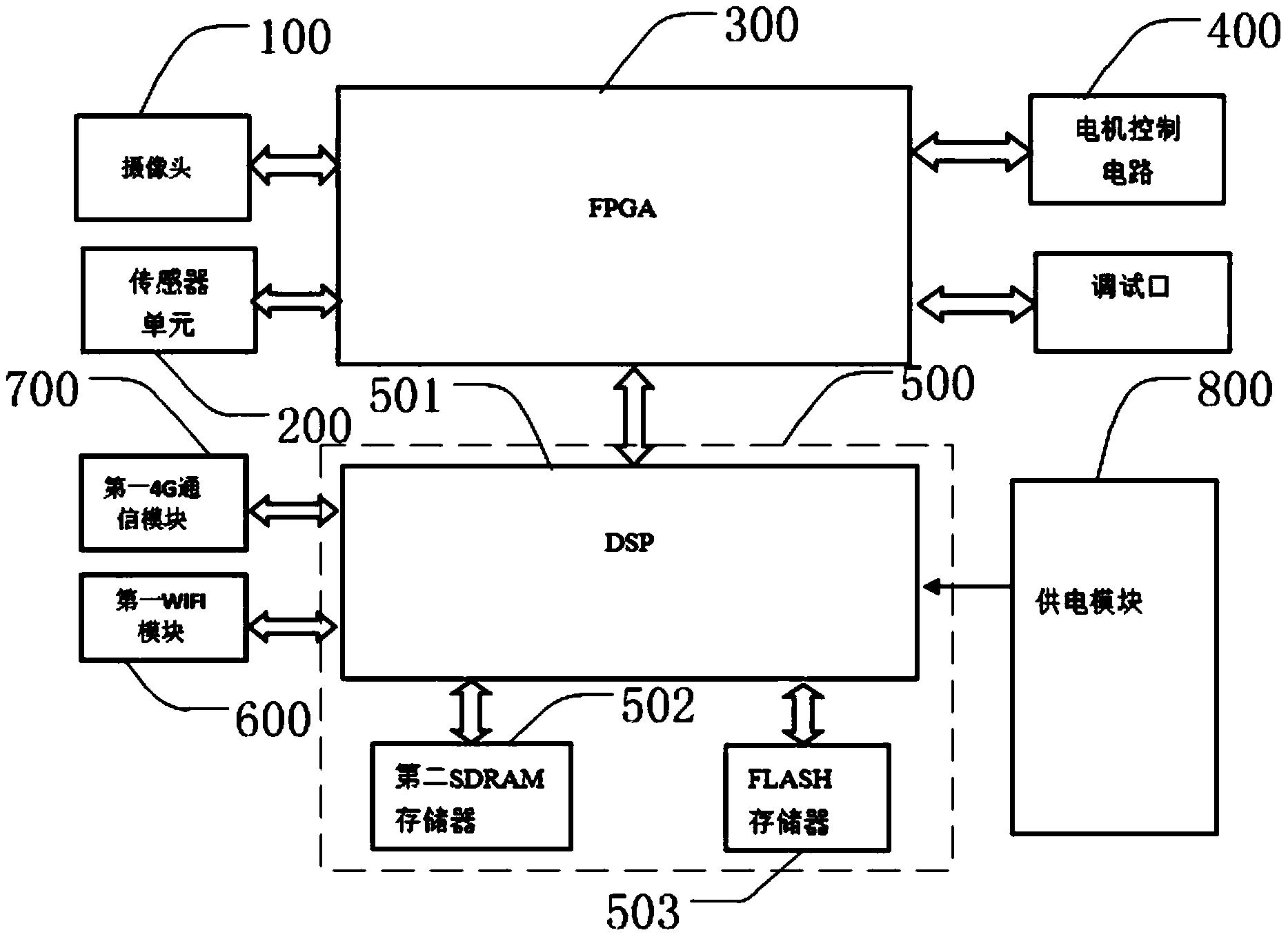
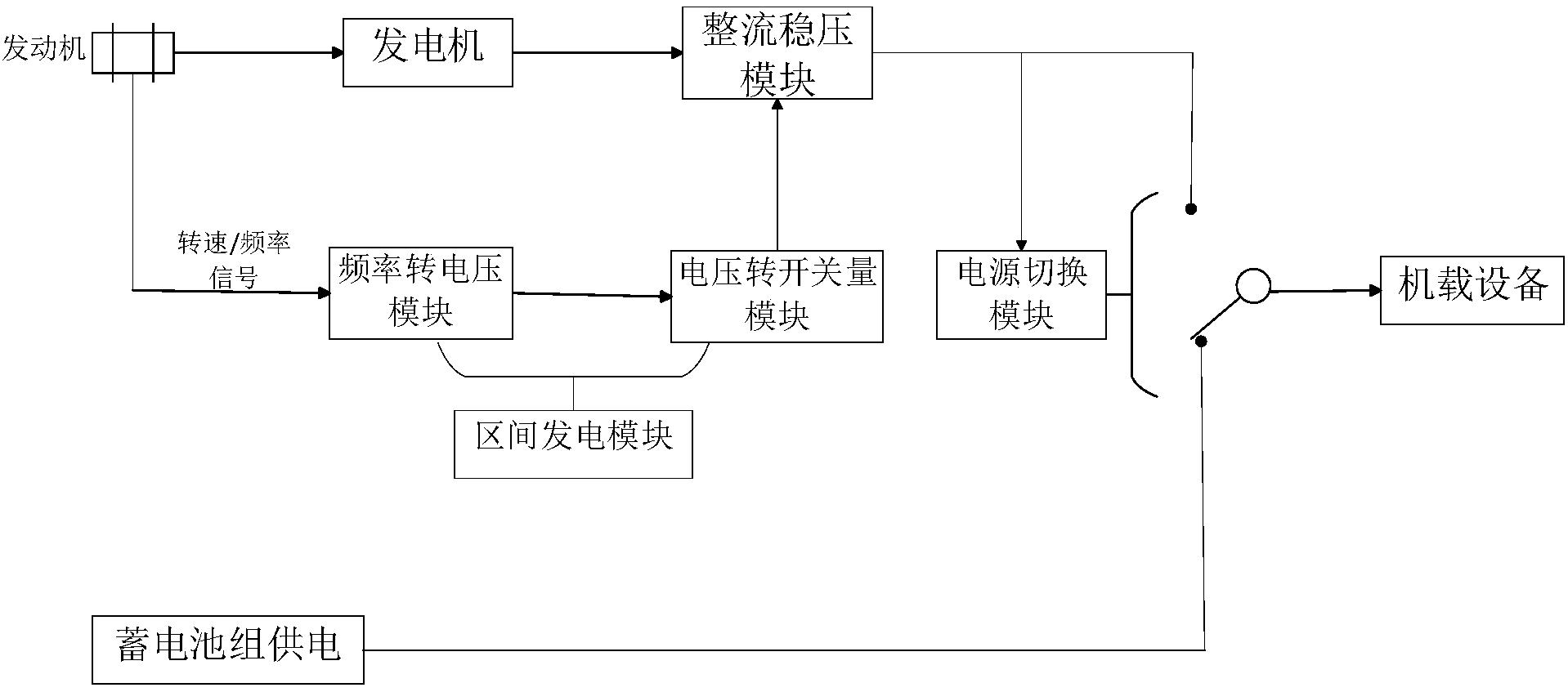
图1是本发明控制装置一个具体实施例的结构框图;
图2是典型直升机桨叶载荷的最佳操作范围;
图3是主旋翼相对转速随前飞速度变化曲线对比图;
图4是燃油流量随前飞速度变化曲线对比图;
图5是直升机需求功率随前飞速度变化曲线对比图;
图6是燃油流量变化量随前飞速度变化曲线图;
图7是变速分配因子nFRT随前飞速度变化曲线对比图;
图8是变速分配因子nCVT随前飞速度变化曲线对比图;
图9是动力涡轮相对转速随主旋翼相对转速变化曲线对比图;
图10是动力涡轮效率随前飞速度变化曲线对比图。
具体实施方式
针对现有技术不足,本发明针对具有连续无级变速传动机构以及动力涡轮转速可变的涡轴发动机的变旋翼转速直升机,提出了一种混合变速的控制方法,可同时获得最优旋翼转速及最优动力涡轮转速,在调节旋翼转速,降低直升机需求功率的同时,调整动力涡轮转速,使涡轴发动机一直工作于高效率状态,从而显著改善直升机/发动机系统的综合性能。
本发明所提出的控制方法具体如下:首先根据大气环境、前飞速度、旋翼转速计算出直升机需求功率;然后根据所述直升机需求功率计算涡轴发动机在一定动力涡轮转速条件下的发动机性能参数;最后,以所述发动机性能参数作为初猜值,以变速分配因子nFRT、nCVT为优化变量,对所述变旋翼转速直升机的直升机/发动机综合系统性能计算模型进行优化求解,并按照求解得到的最优变速分配因子对连续无级变速传动机构和动力涡轮进行控制,其中,变速分配因子nFRT表示动力涡轮相对于设计点100%转速的变速比,变速分配因子nCVT表示连续无级变速传动机构的减速比。
其中,所述优化求解的优化目标可根据实际需求确定,例如最低涡轮前温度、最小直升机需求功率等;本发明优选采用发动机燃油消耗最低的优化目标。所述优化求解可采用现有的遗传算法、粒子群算法以及序列二次规划算法等各类优化算法,本发明优选使用序列二次规划算法。
为便于公众理解,下面通过一个具体实施例并结合附图来对本发明的技术方案进行进一步详细说明:
图1显示了本实施例中变旋翼转速直升机控制装置的基本结构,其主要包括:涡轴发动机性能计算模型,用于根据大气环境、前飞速度、旋翼转速计算出直升机需求功率;
直升机需求功率性能计算模型,用于根据涡轴发动机性能计算模型输出的直升机需求功率计算涡轴发动机在一定动力涡轮转速条件下的发动机性能参数;
优化算法模型,用于以所述发动机性能参数作为初猜值,以变速分配因子为优化变量,对所述变旋翼转速直升机的直升机/发动机综合系统性能计算模型(为描述简单起见,本实施例中的直升机/发动机综合系统性能计算模型仅由涡轴发动机性能计算模型和直升机需求功率性能计算模型构成)进行优化求解,并按照求解得到的最优变速分配因子对连续无级变速传动机构和动力涡轮进行控制;本实施例的优化算法模型是以发动机燃油消耗最低作为优化目标。
如图1所示,直升机需求功率性能计算模型根据大气环境与前飞速度估算出直升机需求功率,并传递至涡轴发动机性能计算模型完成发动机性能计算,获得燃油流量等性能参数;在确保满足各项约束限制的前提下,优化算法模型通过优化求解,输出最优的变速分配因子,获得最优的旋翼转速与动力涡轮相对转速。其中,nFRT、nCVT为变速分配因子,nFRT代表可变动力涡轮相对于设计点100%转速的变速比,nCVT为连续无级变速传动机构的减速比,Ph为直升机需求功率,Wfb为燃油流量。
下面对其中的各主要部分进行进一步详细说明:
1)直升机/发动机综合系统性能计算模型
建立具有一定置信度的直升机/发动机综合系统性能计算模型是确定直升机/发动机最优旋翼转速的前提与基础。本实施例采用一种简化的系统模型,整个性能计算模型包括直升机需求功率性能计算模型、涡轴发动机性能计算模型两部分。
首先根据直升机建模的相关理论与经验公式,建立简化的直升机需求功率性能计算模型,估算给定飞行条件下直升机的需求功率。在初期的性能计算中,直升机的需求功率主要包括旋翼消耗功率与尾桨消耗功率两部分:
Ph=Pmr+Ptr (1)
其中,Pmr、Ptr分别代表旋翼、尾桨需求功率。
旋翼需求功率由旋翼诱导功率Pi、型阻功率Po以及废阻功率Pp三部分组成,各功率可根据直升机的动量理论与相关经验公式获得。
Pmr=Pi+Po+Pp (2)
考虑到尾桨此时以悬停的状态工作,则尾桨需求功率为:
式中, 代表尾桨诱导速度,可由动量理论确定。CD0、 Nmr、Ntr与Rtr分别代表尾桨叶片平均截面阻力系数、尾桨叶片面积、旋翼转速、尾桨转速与尾桨半径。尾桨拉力Ttr可由扭矩平衡公式确定,L代表主旋翼轴与尾桨轴之间的距离。ρ表示大气密度。
对于涡轴发动机性能计算模型而言,首先根据气动热力学特性以及旋转部件特性建立各部件气动热力学数学模型。此外,为了使发动机各部件能协调共同工作,涡轴发动机性能计算模型还需满足发动机各截面流量连续,燃气涡轮、动力涡轮分别与压气机、直升机需求功率(Ph)平衡等平衡方程。这里采用Newton-Raphson(NR)法迭代求解上述平衡方程,选取压气机相对转速(pnc)、燃油流量、燃气涡轮进口相似流量、动力涡轮进口相似流量以及压比系数作为优化求解的初猜值。
2)基于变速分配因子的混合变速方法
通常情况下,直升机围绕固定传动比设计,主旋翼与动力涡轮均工作于设计点转速。则从动力涡轮到旋翼转速之间存在如下表达式:
Nmr=ngearNpt(4)
式中,Ngear为固定减速比,Npt为动力涡轮设计点转速。变旋翼转速过程,可将上式等号左右两边同乘以变速因子n0。
n0Nmr=n0ngearNpt(5)
上式等号左右两边同除以动力涡轮的设计点转速并归一化处理,整理可得:
将上式等号左边记为主旋翼相对转速Ωmr,单位为%。并将n0分解,记作n0=nFRT·nCVT,则上式可改写为:
Ωmr=(100·nFRT)·nCVT(7)
式中nFRT、nCVT为变速分配因子,其中nFRT代表动力涡轮相对于设计点100%转速的变速比,nCVT为连续无级变速传动机构的减速比。100·nFRT代表动力涡轮的相对转速(pnp)。由上式可知,当nFRT=1且nCVT=1时,代表动力涡轮及主旋翼均围绕设计点转速运行;当nCVT=1而nFRT可变时,代表采用变动力涡轮转速)方式实现变旋翼转速;相反,当nFRT=1而nCVT可变时,即动力涡轮相对转速保持100%不变,代表通过连续变传动比方式实现变旋翼转速;当nFRT、nCVT同时可变时,动力涡轮转速相对转速与传动比同时变化,称为基于变速分配因子的混合变速方式。
3)基于混合变速的最小燃油流量优化方法
基于直升机/发动机综合系统性能计算模型与混合变速方式,以发动机燃油消耗最低为优化目标,变速分配因子(nFRT、nCVT)为优化变量,获得最优的旋翼与动力涡轮工作转速,达到降低发动机燃油消耗的目的。为了更真实的模拟主旋翼的工作状态,引入最优桨叶载荷边界约束以确保主旋翼转速仅在较窄的边界范围内变化,不出现叶尖失速。典型直升机桨叶载荷 的最佳操作范围是关于进速比Vx/(Nmr·R)的函数,如图2所示。在最小燃油流量优化过程中,还需确保涡轴发动机满足不超转、不进喘、不超温以及输出扭矩不超限等约束条件,因此整个优化目标函数如式(8)所示。
minJ=Wfb
式中,优化变量为变速分配因子nFRT与nCVT。其中nFRT的最大变化范围为[70%,110%],nCVT的最大变化范围为[37.04%,148.15%]。此外,smc、T45与Te分别代表压气机喘振裕度、动力涡轮出口气体总温以及发动机输出扭矩。
求解这类优化问题的方法有很多,这里采用序列二次规划算法(SQP)进行求解。
为了验证上述技术方案的效果,在飞行高度H=600m的飞行条件下进行基于混合变速的最小燃油流量优化结果仿真验证,并与常规的主旋翼/动力涡轮围绕设计点运行情形作对比,前飞速度Vx从0m/s均匀增至90m/s,间隔10m/s,对比结果如图3-10所示,图10中ηpt代表动力涡轮效率。
图4、图5的纵坐标均相对于设计点数据进行了归一化处理,图6所示的燃油流量变化量为最小燃油流量优化结果相对于主旋翼/动力涡轮围绕设计点转速运行情形。如图3所示,在整个前飞速度变化范围内,最小燃油流量优化获得最优旋翼转速均小于设计点转速,且随着前飞速度增加,最优旋翼转速增加,且最优转速更接近设计点值。结合图4与图5可以看出,基于混合变速的最小燃油流量优化方法有利于降低发动机燃油消耗与直升机需求功率。从图6可以看出,相对于设计点转速运行情形,采用基于混合变速的最小燃油流量优化显著降低了发动机的油耗,峰值甚至超过了16%。图7、图8所示为nFRT、nCVT随前飞速度的变化曲线。由图7、图8可知,当主旋翼/动力涡轮均围绕设计点转速运行时,在整个前飞速度范围内,nCVT、nFRT均保持1恒定,而基于混合变速进行最小燃油流量优化时,nFRT、nCVT均为优化变量,在调节旋翼转速,降低直升机需求功率的同时,改变动力涡轮相对转速,从而进一步减小发动机燃油流量。由图9可知,进行基于混合变速的最小燃油流量优化时,在高速段时,最优动力涡轮转速比最优旋翼转速增加得更快,这是因为发动机在最佳状态运行时需要的转速更高、功率更大。而发动机输出功率越高意味着燃气流量越大,此时必须增加最优动力涡轮转速,以维持最佳涡轮叶片攻角。此外,接近悬停状态时,最优旋翼转速和最优动力涡轮相对转速的变化趋势截然相反。这是因为从中等前飞速度到悬停时,发动机所需的功率增加,最优动力涡轮转速随之增加;另一方面,最优旋翼转速降低,以减小直升机需求功率(图5所示)。如图3、9所示,在直升机悬停时,最优旋翼转速达到最小值,而最优动力涡轮相对转速的最小值位于20-50m/s的中等前飞速度段。从图10可以更直观地看出,相对于设计点转速运行情形,基于混合变速进行最小燃油流量优化时,减小直升机需求功率的同时,调节动力涡轮相对转速,使涡轴发动机一直工作于高效率状态,因此更有利于降低发动机燃油消耗,更利于充分发挥直升机/发动机的综合性能。
一种变旋翼转速直升机的控制方法及控制装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0