








专利摘要
一种对卫星或飞行器轨道和位置实时精密测量方法,涉及空间技术,包括:A)地面中心站建立数据库;B)地面网点上微小型测量终端发射测距码和电文,经卫星转发,由地面中心站大口径天线接收,得微小型终端经卫星至中心站大天线相位中心之间的伪距和电文信息;C)用相邻两微小型测量终端经同一颗卫星由中心站同一面天线接收的两段伪距相减,用伪距差解观测方程,得卫星的高精度位置或轨位解;D)利用同一微小型测量终端至不同卫星的伪距测量值,解算得微小型测量终端的精密位置或伪距;E)把所得精密位置或伪距与预先确定的微小型测量终端精密位置或伪距相减,得偏差值,用偏差值摄动观测方程修正卫星轨道位置,得卫星轨道毫米级位置坐标值。
说明书
技术领域技术领域
本发明涉及空间技术领域,特别涉及一种对卫星或飞行器轨道和位置实时精密测量方法。
技术背景背景技术
前苏联于1957年10月4日成功发射了世界上第一颗人造地球卫星,开创了人类探索和利用宇宙的新时代。现在空间的卫星、火箭、平流层飞艇、空间站、航天器等人造飞行器越来越多,应用日渐广泛。如何精确地测定卫星、航天器等在空间的位置及其他运动参数,描述它们的运动轨迹,一直是空间技术和航天工程中的关键技术之一。世界上测定卫星、飞行器和航天器的技术方法与设备有多种,比较成功的方法有激光测距定轨方法、光学测角定轨方法等。但由于光学测量受天气影响较大,不能实现全天候测量,使方法的应用受到了限制。
随着空间技术的飞跃发展,空间运动的卫星、飞行器、航天器越来越多。这样对卫星、飞行器、航天器的轨道测量的需求剧增,特别是因美国全球卫星定位系统的建立,它以导航卫星为星际位置基准,以星载原子钟为时间测量基准,从而使全球各地均可方便地实现高精度定位,应用价值越来越深远。其中保证精度实现的一个条件就是导航卫星空间位置的精确描述,也就是必须实现导航卫星的高精度测轨定轨。经典的无线电测量方法是采用多侧音测距或脉冲测距测向的方法和技术。2003年李志刚等发明了利用伪码扩频信号测时差、多站交会测量卫星轨道位置的测定轨方法,并在2003年12月申请了发明专利(发明专利申请号:200310102197.1),这项专利技术在中国区域定位系统(CAPS)的应用验证中已获得成功,并经国家级测试验收,测量卫星定轨精度已达到2~3米左右,2006年获得了发明专利(专利号:200310102197.1)。主动测量型设备由于需要发射信号,在战时容易受到攻击与摧毁。为此,施浒立等在2006年5月提出了一种被动测轨方法,也申请了发明专利(专利申请号:200610055908.8)。李志刚、施浒立等在2007年7月还提出了一种提高抗摧毁能力的测轨方法——转发式一站发多站收卫星测轨方法,也申请了发明专利(专利申请号:200710063696.2)。
发明内容发明内容
本发明的目的是公开一种对卫星或飞行器轨道和位置实时精密测量方法,采用逆GPS(全球卫星定位系统)、逆CAPS(中国区域定位系统)的伪距测量原理,多站交会测量,便能得到卫星等飞行器的精密位置解。若是多个卫星目标同时监测,则可以利用其它1~3颗卫星求得偏差值,若是单个卫星目标监测,则应利用商用同步卫星或中国区域定位系统(CAPS)的卫星,进一步修正卫星等飞行物目标的轨位,减少误差或剔除误差,从而得到卫星等飞行物目标位置的高精度三维坐标,得到毫米量级的精密轨位。
为达到上述目的,本发明的技术解决方案是:
一种对卫星或飞行器轨道和位置实时精密测量方法,其包括步骤:
A)地面中心站建立数据库,所有测量数据存储和处理都在地面中心站里实施;
B)通过安装在地面网点上的微小型测量终端,发射测距码、ID号、时间和轨位及其它气象、基准点大气压等有关信息,信号经卫星转发,由地面中心站大口径天线接收后,经低噪声放大、下变频、伪码相关测距解扩、解调和解码步骤,得到地面微小型终端经卫星转发至中心站大天线相位中心之间的伪距和电文信息;
C)为了消除信号在传输过程中时延误差的影响,采用相邻两微小型测量终端经同一颗卫星由中心站同一面天线接收的两段伪距相减来消除误差的做法,最后冗余求解双曲面方程组的交会解,从而获得卫星或飞行器高精度的位置或轨位解;
D)得到精密轨位以后,再利用同一微小型测量终端至不同卫星的伪距测量值,并把这些伪距经相减处理消除误差后,解算得到微小型测量终端的精密位置;
E)把测得的微小型测量终端的精密位置或伪距与预先已确定或测得的微小型测量终端精密位置或伪距相减,得到偏差值,用这些偏差值进一步修正卫星轨道位置,从而进一步得到卫星轨道的更高精度的毫米级位置坐标值。
所述的卫星或飞行器轨道的精密测量方法,其所述微小型测量终端,一般为无人值守运行的终端,应用的天线是小口径或小尺寸天线,具有发射功能,或同时具有发射和接收功能;具有接收功能时,中心站向终端发指令,以控制微小型终端的工作状态和各项参数。
所述的卫星或飞行器轨道的精密测量方法,其所述B)步,微小型测量终端发射的信号,至少经三颗卫星转发,由地面中心站三面天线接收,分别测量出上述伪距,最后由地面中心站作各种数据处理,工作量集中在具有高性能计算机的地面中心站,使得大量数据得到实时处理和精细处理,以实现准实时的高精度的轨道预报。
所述的卫星或飞行器轨道的精密测量方法,其所述至少三颗卫星,是在空间保持一定间隔及分布的三颗以上卫星;若本身测量只有一颗卫星时,可以利用中国区域定位系统中的卫星与卫星信号。
所述的卫星或飞行器轨道的精密测量方法,其所述B)步、C)步、D)步中,为提高伪距的测量精度,可以辅以载波相位测量方法。
所述的卫星或飞行器轨道的精密测量方法,其所述D)步中的不同卫星,是在空间保持一定间隔及分布的至少三颗卫星。
所述的卫星或飞行器轨道的精密测量方法,其所述微小型测量终端,其电源由电网供电,或用电池供电,在偏僻地区或沙漠、山区,或用太阳能电池供电。
本发明方法,由于所有测量和数据处理都在地面中心站里实施的,避免了测量数据的远距离传输,所以有望对卫星等飞行器进行准实时的轨道预报。这种测量网系统因各测量点采用了微小型测量终端,微小型测量终端造价低、可无人值守运行,使整个测量网系统设备相对简单,运行成本低。所以不同于以前造价昂贵的有人值守的卫星测轨站,可以在测量网节点上进行多测点广泛布站,例如可布设几十个至几千个测量点,从而可以实现大冗余量测量及大冗余量求解,最后得到卫星等飞行器的精密轨位。
本发明方法适用于对各类卫星轨道进行精密定位和测轨的应用领域,同样也适用于气球、火箭、飞机、空间站、飞艇等其它飞行器运动参数的精确测量。
附图说明附图说明
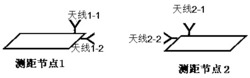
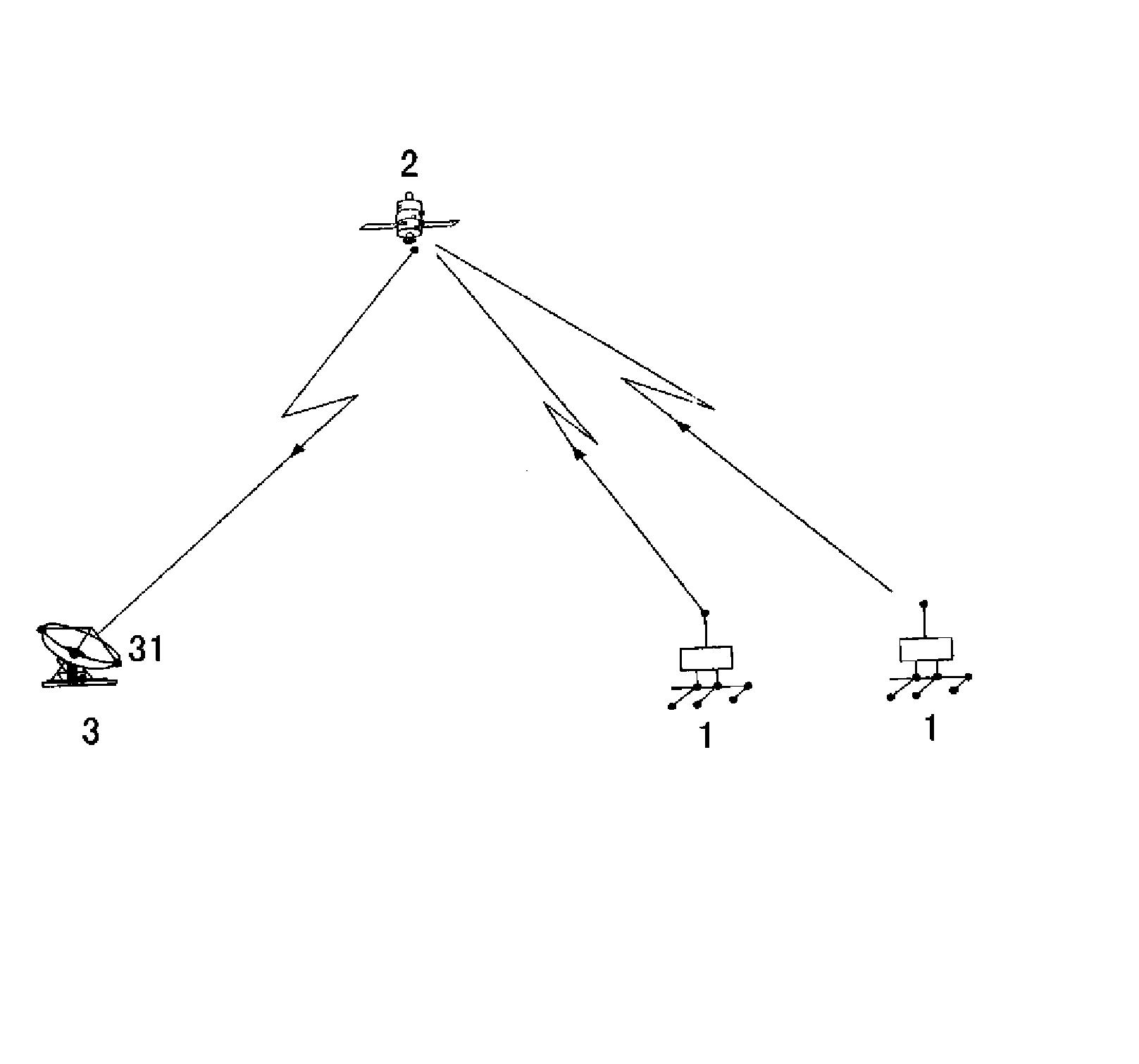
图1本发明方法伪距差测量原理示意图;
图2.本发明方法已知卫星位置求测量点精密位置原理示意图;
图3.本发明方法同一终端经相邻两颗卫星到接收站两面天线的两段伪距示意图。
具体实施方式具体实施方式
本发明的方法采用逆GPS(全球卫星定位系统)、逆CAPS(中国区域定位系统)的伪距测量原理。信号作逆向传输,称为入站测量或入站定位。即由测量终端1发信号,经卫星2转发,由地面中心站3完成伪距测量。若测量终端1位置和测量终端1经卫星2至地面中心站3的伪距已精确测定,则可以测定卫星2的轨道位置。为了消除信号传输路径中的时延误差,可以采用两个测量终端1经同一颗卫星2传输的两段伪距(见附图1)相减得伪距差的方法求解双曲面方程组,得卫星2精密轨位。当轨道位置精确测定以后,则利用轨道位置值和伪距测量值便可以测定测量终端1的精确位置,实现测点定位。把测定的测量终端1位置值(或伪距)与测量终端1已知精确位置值(或伪距)相减得偏差值,利用这些偏差值可以反求得到卫星2的轨位误差,进一步修正卫星2轨位,精确地获得卫星2的高精度实时轨位。测量终端1入站定位时,空间段同样需要有保持一定间隔及分布的三颗以上卫星2,而且对各项影响伪距测量的误差需要实施精密测量、计算,并做出适当处理,才能精确地测定卫星2轨位以及实现测量终端1的精确定位(见附图2)。
本发明采用的地面测量终端1是微小型终端,可以有发射和接收功能,但至少应有发射功能,通信终端由微小型天线、基带、变频器、晶振和接口等部分组成。其中,微小型天线可以选用多种型式的天线。基带设备把要发送的信息扩频调制后,通过微小型天线向卫星2发射。扩频调制信号经卫星2转发后,又向地面中心站3广播。地面中心站3安装有大口径天线31,天线31接收卫星2的下行信号后,经低噪声放大、下变频、解扩解调解码,便可以得到传输的信息。在伪码相关解扩时,伪码相关测得时间差,便能获得测量终端1经卫星2转发至地面中心站3天线31相位中心之间的伪距。
当实施这类定位时,若采用常规的做法,应求得或测得各项影响伪距测量的时延误差。例如:选一部分测量点,设双频或三频频率配置,用来精确测量电离层时延和测量轨位;可以精确测量接收通道和发射通道时延误差;可以测量水汽和依靠气象资料由模型消除对流层时延误差;可以设未知数求解得到发射机端的时钟偏差等。但采用这些方法要精确测得各项误差还是比较困难的,也难于达到1毫米级的定位精度。本发明方法强调采用误差相消法。因为从相距不太远的两个测量点上的测量终端1经同一颗卫星2至地面中心站3同一面天线31的路径状况(见附图1)是基本相似的,故可以采用伪距相减法消去各相关误差,最后通过解双曲面交会方程组求解得到卫星2精密轨位。把轨位回代,求解球交会方程,便可以得到测量点的测量终端1精确的三维位置坐标。这些测量终端1的精确位置是可以预先测定已知的,把测量得到的测量点的测量终端1三维位置值,减去已知的精确位置测量值,便可以得到他们之间的偏差值,利用这些偏差值再进一步去修正卫星2等飞行器轨位,便使卫星2等飞行器的轨位值更精确。
上述介绍的测量求解过程,可以分为如下两个阶段加以叙述:
1.精确测定卫星2轨位
当两个测点上的两个测量终端1发射并经过一颗卫星2至地面中心站3大天线31接收(见附图1)的两段伪距相减时,可以减去极大部分时延误差。在测量网中,测量点很多,以它们作为固定边界条件,并两两相减得到很多段伪距差,则可以大冗余量求解测量方程组,得到卫星2瞬时的精密轨道位置。
当两个测量终端1发信号通过同一颗卫星2至地面中心站3天线31的伪距相减求差时(见附图1),其表达式为:
i=1,2,....,n1,n1<n
j=1,2,....,m1,m1<m
k=1,2,....,m1,m1<m
式中,(xi,yi,zi)为i测点的地面位置坐标,(xi+q,yi+q,zi+q)为(i+q)测点的位置坐标(q≠0),(xj,yj,zj)为第j颗卫星2的空间位置坐标,(xk,yk,zk)为地面中心站3第k面大天线31相位中心的坐标,ρijk为测点i经卫星j至地面站k天线31间的测量伪距,tjs为卫星j的转发器时延,tijap为测量点i至卫星j间的上行传播路径上的对流层时延,tjkap为卫星j至地面中心站3天线k间的下行路径对流层时延,tijai为测点i经卫星j上行路径的电离层时延,tjkai为卫星j至地面站天线k间的下行路径电离层时延,tit为测点i的发射通道时延,tkr为地面站天线k的接收通道时延,tib为测点i的时钟偏差,tkg为地面中心站3天线k的时钟偏差,tijko为测点i经卫星j至地面站天线k间的传输路径中的其它时延误差,ρ(i+q)jk为测点(i+q)经卫星j至地面中心站3天线k间的测量伪距,t(i+q)jap为测点(i+q)至卫星j间上行传输路径上的对流层时延,t(i+q)jai为测点(i+q)至卫星j间的上行传输路径上的电离层时延,t(i+q)t为测点(i+q)的微小终端发射通道时延,t(i+q)b为测点(i+q)的微小终端时钟偏差,t(i+q)jko为测点(i+q)经卫星j至地面中心站3天线k间的传输路径上的其它时延误差,n为测点i的总数量,m为卫星j的总数量。则式(1)可以变换成:
i=1,2,....,n1,n1<n
j=1,2,....,m1,m1<m
k=1,2,....,m1,m1<m
根据式(3),可作如下分析:(tijap-t(i+q)jap)和(tijai-t(i+q)jai)分别为基准点i和测点(i+q)至卫星2传输路径上的对流层的时延差和电离层时延差。当两面天线相距不远时,可视为传输途径中的误差影响基本相同,所以这两路信号传输时延误差的偏差为微小量,可忽略不计。(tit-ti+qt)为两测点终端二路发射通道的时延差,可以分别测出。其他误差的(tijko-t(i+q)jko)也可视为相等。另外,由于测量终端1的两面天线分别有两个时钟,也要测出它们的偏差值(tib-ti+qb)。也可以通过时间比对实现同步调整,或求出偏差,这样式(3)可变为
i=1,2,....,n1,n1<n
j=1,2,....,m1,m1<m
式中,Δter为其他误差的差值综合。
由于n1的数目可以比较大,所以冗余求解式(4)可以得到卫星2的高精度三维位置坐标冗余解(xj,yj,zj)。
2.求解测点测量终端1三维坐标
对求解得到的卫星2轨位可以进一步作修正,具体做法是利用求得的轨道位置,计算部分测点位置(见附图2)与测点测量终端1已知的精密位置比较,得偏差值。利用这些偏差值再进一步对卫星2轨道位置进行精密修正,便可以得到更精密的轨位。
当卫星2轨道位置精确已知后,则测量终端1的精确测量问题变为已知卫星2位置求测量终端1精密位置的问题(见附图2),这时量测方程如下:
i=1,2,......n1,j=1,2,....m1 (5)
式中,ρij无直接测量数据,但可以从ρijk与导航中心站位置、卫星轨位、转发器时延及其它时延误差的换算得到,即
式中,tjs为转发器的时延误差,tkjap为卫星j至地面中心站k下行链路的对流层时延误差,tkjai为卫星j至地面中心站k下行链路的电离层时延误差,tkjr为下行接收通道的时延误差,tkg为地面中心站3天线k的时钟偏差,tkjo为其他误差。则以这些卫星2为位置测量基准,以ρij为定位圆半径求解圆方程组,便可以得到测量终端1的精确位置,即
i=1,2,....,n1,n1<n
j=1,2,....,m1,m1<m
k=1,2,....,m1,m1<m
在求解方程组(7)时,为了得到卫星2精确坐标(xj,yj,zj),必须精确测出或求出影响伪距的各项误差,如采用双频求解得到电离层误差;可以精确测出发射通道和接收通道的时延误差;用模型及干湿大气含量测量值计算获得对流层的时延误差。但因误差较多,有些时延误差的精确测量又比较难,所以实际实施时会有一定难度。一个解决办法是采用对同一测量终端1经相邻两颗卫星2到地面接收站3两面天线31的两段伪距(见附图3)测量值求差来解决,这样,可以把传输路径中的时延误差相消,这时变成求解下述方程组
i=1,2,....,n3,n3<n
ja=1,2,....(m1-1)
jb≠ja
k=1,2,....,m1
式中,Δterz为残差,若残差还偏大,可以根据伪距差大小作相应的误差修正。只要Δterz足够小,便可以不作修正。当卫星2数超过四颗时,则求解方程组(8),可以得到测量点测量终端1的三维位置坐标(xj,yj,zj)。
针对上述具体实施方案,可以分析精度如下:
伪距测量分辨率可以达到厘米级,甚至毫米级(可参阅发明专利“地壳毫米级位移和地震活动的实时精密监测网”发明专利,正在申请中)。当采用两段相邻伪距相减时,不但能把相应误差相消,而且伪距差测量分辨精度仍能达到厘米级甚至毫米级。作为边界条件的测量点位置可以预先精确测量确定,定位精度可达毫米级。同时因为测点数量n可以很大,例如可为几十、几百、甚至几千个测点,成为大冗余量测量,大冗余量测量能提高测量分辨率至 利用求得的轨道位置,计算测点位置,通过把测得的精确测量终端1位置与测量终端1的已知位置相减,可以求得偏差,利用这些偏差值再反求卫星2轨道位置误差,可以进一步对卫星2轨道位置进行修正,得到更精密的轨位,达到毫米级测量精度。
对卫星或飞行器轨道和位置实时精密测量方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0