









专利摘要
本发明公开了一种基于轨道环的空间碎片清除方法,首先在任务轨道的局部空间范围内收集空间碎片以构建碎片集群,再控制主动航天器机动至任务轨道中并与碎片集群的几何中心相位相差180°的空间位置处,然后利用空间系绳将碎片集群与主动航天器物理连接以形成轨道环,再控制主动航天器产生扰动使轨道环失稳以实现轨道环的初始偏移,利用了轨道环失稳偏移后在地球引力作用下偏移持续增大的特性,使得碎片集群再入大气,当碎片集群降轨到大气层上界以内时,解除轨道环中的空间系绳,碎片集群中的空间碎片即在坠入大气层的过程中烧毁,实现了空间碎片的清除,以极低的能量消耗代价实现了大批量空间碎片的清除,对未来太空交通管制与控制具有重大意义。
权利要求
1.一种基于轨道环的空间碎片清除方法,其特征在于,
包括以下步骤:
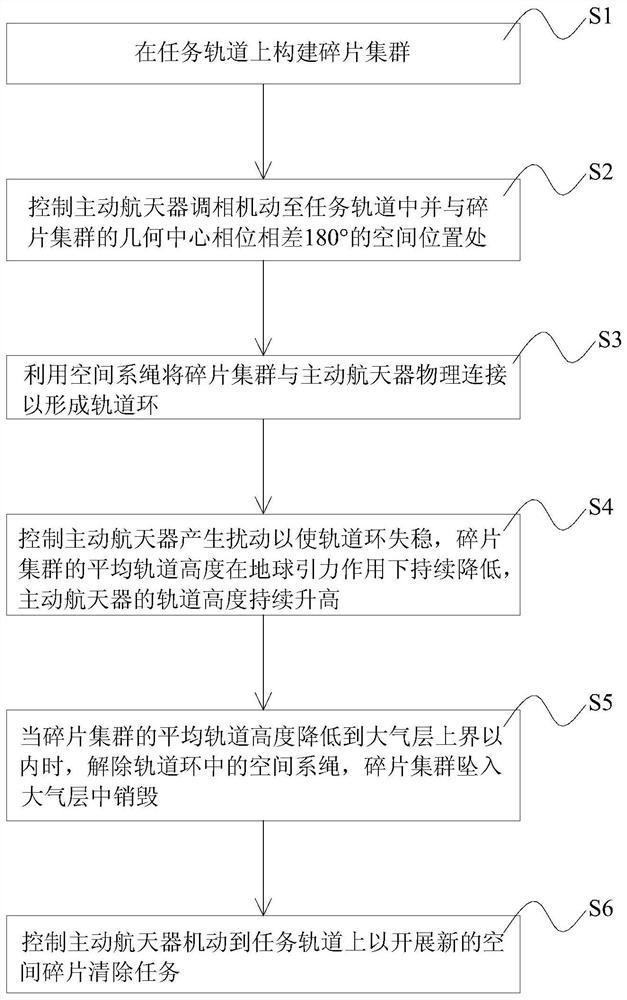
步骤S1:在任务轨道上构建碎片集群;
步骤S2:控制主动航天器调相机动至任务轨道中并与碎片集群的几何中心相位相差180°的空间位置处;
步骤S3:利用空间系绳将碎片集群与主动航天器物理连接以形成轨道环;
步骤S4:控制主动航天器产生扰动以使轨道环失稳,碎片集群的平均轨道高度在地球引力作用下持续降低,主动航天器的轨道高度持续升高;所述步骤S4具体为:控制主动航天器产生初始径向推力以使轨道环的中心相对于地心产生水平偏移,且碎片集群的平均轨道高度降低,主动航天器的轨道高度升高;
步骤S5:当碎片集群的平均轨道高度降低到大气层上界以内时,解除轨道环中的空间系绳,碎片集群坠入大气层中销毁。
2.如权利要求1所述的基于轨道环的空间碎片清除方法,其特征在于,
在所述步骤S5之后还包括以下步骤:
步骤S6:控制主动航天器机动到任务轨道上以开展新的空间碎片清除任务。
3.如权利要求1所述的基于轨道环的空间碎片清除方法,其特征在于,
所述步骤S1包括以下步骤:
步骤S11:在任务轨道上捕捉收集一定区域内的空间碎片并形成多个碎片集;
步骤S12:将多个碎片集整合成一个碎片集群。
4.如权利要求3所述的基于轨道环的空间碎片清除方法,其特征在于,
所述步骤S1具体为:利用太空载具在任务轨道上实施打包作业,捕捉收集一定区域内的空间碎片并使用飞网进行包裹形成多个碎片集,利用空间系绳将多个碎片集连接形成碎片集群。
5.如权利要求1所述的基于轨道环的空间碎片清除方法,其特征在于,
所述步骤S5中,当碎片集群的平均轨道高度降低至100km~200km时,解除轨道环中的空间系绳。
6.如权利要求1所述的基于轨道环的空间碎片清除方法,其特征在于,
所述轨道环的中心相对于地心产生偏移后,地球对轨道环的万有引力在x方向上的分量F
轨道环受到的万有引力方向与偏移方向相反,使得轨道环的中心与地心的偏移量持续扩大,最终轨道环近地点将低于大气层上界;
其中,R表示轨道环的半径,a表示地心与轨道环中心之间的偏移距离,θ表示该质量微元和轨道环中心的连线与x方向之间的夹角,G为万有引力常量,M为地球的质量,
说明书
技术领域
本发明涉及空间碎片清除技术领域,特别地,涉及一种基于轨道环的空间碎片清除方法。
背景技术
空间碎片是伴随人类探索和利用外层空间而产生的太空垃圾,截至2019年1月,美国空间监测网(Space Surveillance Network,SSN)编目10cm以上在轨废弃物数量已超过2万个,这些编目内的在轨废弃物数量仅占碎片总量的0.02%,而无法编目的微小废弃物重量已达几千吨,数量超过10亿个。最近几年,随着科技的不断进步,进入太空的门槛不断降低,卫星应用在民用和商用领域不断拓展,微纳卫星数量急剧增多,更加导致空间碎片的急剧增多。
尽管从1957年开始人类进入宇宙至今已有六十余年的历史,但空间碎片清理发展较晚,目前国际上已经采用的方法主要为捕获移除、激光推离、气动/粒子帆离轨等,其中捕获移除方式又可以根据捕获方法分为机械臂抓捕、飞网拦截等多种方案,部分方案已取得在轨试验验证。
1、激光烧蚀推进:空间物体在激光照射之下会发生烧蚀,进而剥离产生推力以达到离轨的目的。但是,激光的产生需要大量的能源,天基平台难以支持,地基平台虽然可以很容易满足能源条件,但距离目标较远,空气损耗较大。此外,激光离轨技术只是做到了空间碎片离轨,向更高轨道转移,不能完全消除空间碎片的存在。
2、飞网捕获:在任务航天器内安装捕获网,当飞临目标碎片时展开捕获网,进而完成捕捉任务。随后通过任务航天器变轨,将被捕获物体带入再入轨道,从而实现碎片清理。但是,飞网数量有限,且执行该任务的航天器造价高、发射成本高、能量消耗大,因此不适合用于清理廉价且大量的太空垃圾。
3、机械臂捕获:机械臂捕获的方法与飞网类似,通过任务航天器携带具有抓捕功能的机械臂,飞临目标碎片后通过机械臂实施抓捕,将其打包收回或直接拖入再入轨道。因此有着与飞网捕获类似的缺陷,即面对大量空间碎片无能为力,性价比极低。
4、气动/粒子帆离轨:太阳光子、宇宙粒子以及近地轨道上稀薄的大气会对空间物体产生作用力,这些阻力与受力面积成正比,因此越大的横截面积会带来越大的作用力。气动/粒子帆正是利用了这一点,通过展开或者安装帆布,增大横截面积,借此获得更大的作用力。但是,气动/粒子帆需要发射前期设置或在轨安装,对于长期存在的空间垃圾、失控航天器等该方法几乎不可行。
发明内容
本发明提供了一种基于轨道环的空间碎片清除方法,以解决目前的空间碎片清理方案存在的能耗大、成本高或者无法清理大量的太空垃圾的技术问题。
根据本发明的一个方面,提供一种基于轨道环的空间碎片清除方法,包括以下步骤:
步骤S1:在任务轨道上构建碎片集群;
步骤S2:控制主动航天器调相机动至任务轨道中并与碎片集群的几何中心相位相差180°的空间位置处;
步骤S3:利用空间系绳将碎片集群与主动航天器物理连接以形成轨道环;
步骤S4:控制主动航天器产生扰动以使轨道环失稳,碎片集群的平均轨道高度在地球引力作用下持续降低,主动航天器的轨道高度持续升高;
步骤S5:当碎片集群的平均轨道高度降低到大气层上界以内时,解除轨道环中的空间系绳,碎片集群坠入大气层中销毁。
进一步地,在所述步骤S5之后还包括以下步骤:
步骤S6:控制主动航天器机动到任务轨道上以开展新的空间碎片清除任务。
进一步地,所述步骤S1包括以下步骤:
步骤S11:在任务轨道上捕捉收集一定区域内的空间碎片并形成多个碎片集;
步骤S12:将多个碎片集整合成一个碎片集群。
进一步地,所述步骤S1具体为:利用太空载具在任务轨道上实施打包作业,捕捉收集一定区域内的空间碎片并使用飞网进行包裹形成多个碎片集,利用空间系绳将多个碎片集连接形成碎片集群。
进一步地,所述步骤S5中,当碎片集群的平均轨道高度降低至100km~200km时,解除轨道环中的空间系绳。
进一步地,所述步骤S4具体为:控制主动航天器产生初始径向推力以使轨道环的中心相对于地心产生水平偏移,且碎片集群的平均轨道高度降低,主动航天器的轨道高度升高。
进一步地,所述轨道环的中心相对于地心产生偏移后,地球对轨道环的万有引力在x方向上的分量为:
轨道环受到的万有引力方向与偏移方向相反,使得轨道环的中心与地心的偏移量持续扩大,最终轨道环近地点将低于大气层上界。
本发明具有以下效果:
本发明的基于轨道环的空间碎片清除方法,首先在任务轨道的局部空间范围内收集空间碎片以构建碎片集群,可以有效地收集任务轨道上零星散布的大量空间碎片,再控制主动航天器机动至任务轨道中并与碎片集群的几何中心相位相差180°的空间位置处,然后利用空间系绳将碎片集群与主动航天器物理连接以形成轨道环,再控制主动航天器产生扰动使轨道环失稳以实现轨道环的初始偏移,利用了轨道环失稳偏移后在地球引力作用下偏移持续增大的特性,使得碎片集群再入大气,当碎片集群的平均轨道高度降低到大气层上界以内时,解除轨道环中的空间系绳,碎片集群中的空间碎片即在坠入大气层的过程中烧毁,实现了空间碎片的清除。本实施例的基于轨道环的空间碎片清除方法,通过构建轨道环的方式,利用了轨道环失稳偏移后在地球引力作用下偏移持续增大的特性,只需控制主动航天器推动轨道环产生初始的少量偏移即可实现碎片集群的自动降轨,最后坠入大气层中烧毁,以极低的能量消耗代价实现了大批量空间碎片的清除,对未来太空交通管制与控制具有重大意义。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1是本发明优选实施例的基于轨道环的空间碎片清除方法的流程示意图。
图2是本发明优选实施例的图1中的步骤S1的子流程示意图。
图3是本发明优选实施例的图1中的步骤S2中控制主动航天器调相的示意图。
图4是本发明优选实施例的图1中的步骤S3中构建轨道环的示意图。
图5是本发明优选实施例的图1中的步骤S4中主动航天器施加径向扰动的示意图。
图6是本发明优选实施例的图1中的步骤S5中地球质心与轨道环之间的相对位置示意图。
图7是本发明优选实施例的轨道环处于稳态的受力示意图。
图8是本发明优选实施例的轨道环失稳后的受力示意图。
具体实施方式
以下结合附图对本发明的实施例进行详细说明,但是本发明可以由下述所限定和覆盖的多种不同方式实施。
如图1所示,本发明的优选实施例提供一种基于轨道环的空间碎片清除方法,包括以下步骤:
步骤S1:在任务轨道上构建碎片集群;
步骤S2:控制主动航天器调相机动至任务轨道中并与碎片集群的几何中心相位相差180°的空间位置处;
步骤S3:利用空间系绳将碎片集群与主动航天器物理连接以形成轨道环;
步骤S4:控制主动航天器产生扰动以使轨道环失稳,碎片集群的平均轨道高度在地球引力作用下持续降低,主动航天器的轨道高度持续升高;
步骤S5:当碎片集群的平均轨道高度降低到大气层上界以内时,解除轨道环中的空间系绳,碎片集群坠入大气层中销毁。
可以理解,本实施例的基于轨道环的空间碎片清除方法,首先在任务轨道的局部空间范围内收集空间碎片以构建碎片集群,可以有效地收集任务轨道上零星散布的大量空间碎片,再控制主动航天器机动至任务轨道中并与碎片集群的几何中心相位相差180°的空间位置处,然后利用空间系绳将碎片集群与主动航天器物理连接以形成轨道环,再控制主动航天器产生扰动使轨道环失稳以实现轨道环的初始偏移,利用了轨道环失稳偏移后在地球引力作用下偏移持续增大的特性,使得碎片集群再入大气,当碎片集群的平均轨道高度降低到大气层上界以内时,解除轨道环中的空间系绳,碎片集群中的空间碎片即在坠入大气层的过程中烧毁,实现了空间碎片的清除。本实施例的基于轨道环的空间碎片清除方法,通过构建轨道环的方式,利用了轨道环失稳偏移后在地球引力作用下偏移持续增大的特性,只需控制主动航天器推动轨道环产生初始的少量偏移即可实现碎片集群的自动降轨,最后坠入大气层中烧毁,以极低的能量消耗代价实现了大批量空间碎片的清除,对未来太空交通管制与控制具有重大意义。
可以理解,作为优选的,所述基于轨道环的空间碎片清除方法在所述步骤S5之后还包括以下步骤:
步骤S6:控制主动航天器机动到任务轨道上以开展新的空间碎片清除任务。
另外,所述步骤S1包括以下步骤:
步骤S11:在任务轨道上捕捉收集一定区域内的空间碎片并形成多个碎片集;
步骤S12:将多个碎片集整合成一个碎片集群。
具体地,利用空间机器人、太空飞船等太空载具在任务轨道上设定好的位置实施打包作业,通过捕捉收集一定区域内的空间碎片并使用飞网进行包裹以形成多个碎片集,再利用空间系绳将多个碎片集连接形成碎片集群。可以理解,通过先对一定区域内的空间碎片进行打包形成碎片集,再将多个碎片集连接形成碎片集群,便于一次性对任务轨道中大范围内的空间碎片进行收集,从而进行后续的大批量清除。
可以理解,在所述步骤S2中,如图3所示,在构建完碎片集群后,控制主动航天器运行至任务轨道中,并通过调整相位机动转移至与碎片集群的几何中心相位相差180°的空间位置处,以便于在产生扰动致使轨道环失稳时,碎片集群再入大气层而主动航天器则进入到更高的轨道中。
可以理解,如图4所示,所述步骤S3具体为:通过牵引卫星调整相位在多个碎片集之间机动,并利用空间系绳将多个碎片集和主动航天器连接,从而形成轨道环。其中,在稳态下,轨道环始终稳定地处于漂浮轨道上。
可以理解,如图5所示,所述步骤S4具体为:控制主动航天器产生初始径向推力以使轨道环的中心相对于地心产生水平偏移,碎片集群的平均轨道高度降低,主动航天器的轨道高度升高,此时轨道环处于失稳状态。
如图6所示,当所述轨道环的中心相对于地心产生偏移后,根据余弦定理得到:
p
其中,p表示地心到轨道环上任一质量微元之间的距离,R表示轨道环的半径,a表示地心与轨道环中心之间的偏移距离,θ表示该质量微元和轨道环中心的连线与x方向之间的夹角。
设万有引力常量为G,则地球对轨道环的质量微元dm的万有引力为:
其中,M表示地球的质量,ρ表示轨道环的线密度(kg/m)。
其在x方向上的投影为:
dFx=-dF·cosβ
β表示质量微元和地心的连线与x方向之间的夹角。
而轨道环的质量微元dm的势能为:
μ=G·M表示地球引力常数
由此得到整个轨道环的势能为:
当地球处于轨道环中心时,即地心与轨道环的中心重合,整个轨道环的势能为:
设初始时刻轨道环的中心和地心重合,当两者距离为a时轨道环的势能降低,转换为轨道环的动能,设这时轨道环的速度为v,则有:
由此得到:
根据几何关系,得到:
p cosβ-R cosθ=a
由此,得到:
根据对称性得到地球对轨道环的万有引力在x方向上的分量为
可以发现,如图7和图8所示,当轨道环受摄动力影响在赤道面内产生相对地球质心的水平偏移时,轨道环受到的万有引力方向与偏移方向相反,使得轨道环中心和地球质心的偏移量持续扩大,最终轨道环近地点将低于大气层上界。
而现有的拖拽式回收方法通过飞网、机械臂等方式将主动航天器与目标航天器(即待清理的空间碎片)之间建立联系,形成一个整体,随后这个整体在主动航天器的作用下减速,促使航天器的轨道近地点降低。如果降轨后的近地点依旧在大气层上界之上,则航天器将飞略近地点后又返回远地点,并往复循环,而无法坠入大气层内烧毁,此时的轨道仅为一条普通的椭圆轨道(绝大部分的在轨航天器都运行在椭圆轨道上)。如果近地点低于大气层上界而高于地表,则航天器将进入大气层,在此过程中大气阻力会降低轨道远地点高度,降低航天器的速度,并且气动热会产生烧蚀,会对主动航天器产生一定程度的损坏。而且,在此过程中,如果断开主动航天器和目标航天器之间的联系,一旦目标航天器的机械能足够高,则目标航天器又会重新脱离大气层,无法实现销毁。若近地点低于地表高度,则目标航天器会直接坠向地面。
以霍曼转移为例,已知两条圆轨道高度分别为r1、r2,且r1>r2>地球半径,则霍曼转移所需ΔV为:
而转移轨道所需ΔV为:
该转移轨道即为一条椭圆轨道,近地点高度为r2。因此可以发现传统的碎片拖拽是利用主动航天器的能量抵消空间碎片的机械能,使其降轨坠入大气层内,主动航天器需要一直消耗能量来推动目标航天器不断降轨,能量消耗巨大。而本发明的基于轨道环的碎片清除方式则利用了轨道环在地球引力场中的不稳定性质,通过轨道环连接将空间碎片的机械能转移给了主动航天器,使空间碎片坠入大气层,而主动航天器的轨道高度则持续升高。从动力学角度来看,这两个过程是完全不同的。
可以理解,在所述步骤S5中,当碎片集群的平均轨道高度降低至100km~200km时,即解除轨道环中的空间系绳,此时碎片集群可以快速地坠入大气层内销毁。其中,具体通过地面测高技术来检测碎片集群的轨道高度。其中,空间系绳的解锁装置属于成熟技术,例如爆炸螺栓等都可以实现该解锁功能。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
基于轨道环的空间碎片清除方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0