









专利摘要
本发明公开了一种微型三轴承矢量喷管的传动结构及其控制方法,传动结构包括轴对称矢量喷管和矢量喷管牵引控制机构;轴对称矢量喷管包括喷管前段、喷管中段、喷管后段和喷管末段;矢量喷管牵引控制机构包括喷管前后段牵引连接机构、喷管中段牵引机构和喷管末段牵引机构。本发明采用线牵引方式,而线牵引部件可以固定安装在固定翼无人机的机体上,因此一方面大大降低了轴对称矢量喷管的制造复杂程度,另一方面可以实现轻量化和降低功耗,再一方面可以实现轴对称矢量喷管旋转变形复杂动作的极大简化,使微型矢量喷口的实用化成为了可能,实现解决在电池容量一定的情况下固定翼无人机飞行距离较短的问题和固定翼无人机起飞要求较高的问题。
权利要求
1.一种微型三轴承矢量喷管的传动结构,包括轴对称矢量喷管,轴对称矢量喷管包括喷管前段(1)、喷管中段(2)、喷管后段(3)和喷管末段(4),喷管前段(1)、喷管中段(2)和喷管后段(3)均是横截面为椭圆形的管型结构、且椭圆形满足长轴×cos22.5°=短轴的条件,喷管末段(4)是横截面为圆形的管型结构,喷管前段(1)的前端具有横截面为圆形的缩口喷口结构,喷管前段(1)的后端面是与喷管前段(1)的中轴线呈22.5°夹角的斜面结构,喷管中段(2)的前端面和后端面均是与喷管中段(2)的中轴线呈22.5°夹角的斜面结构、且喷管中段(2)的前端面的中心线和后端面的中心线空间相交设置,喷管后段(3)的前端面是与喷管后段(3)的中轴线呈22.5°夹角的斜面结构,喷管前段(1)的后端面与喷管中段(2)的前端面之间通过滚动轴承结构(9)连接,喷管中段(2)的后端面与喷管后段(3)的前端面之间通过滚动轴承结构(9)连接,喷管末段(4)包括同轴设置的前旋转段和后固定段,喷管后段(3)的后端与喷管末段(4)前旋转段的前端圆滑过渡固定连接,喷管末段(4)后固定段固定安装在固定翼无人机的机体上,喷管末段(4)前旋转段的后端面通过沿其周向方向设置的滚动轴承结构(9)与喷管末段(4)后固定段的前端面安装连接;
其特征在于,微型三轴承矢量喷管的传动结构还包括矢量喷管牵引控制机构,矢量喷管牵引控制机构包括喷管前后段牵引连接机构、喷管中段牵引机构和喷管末段牵引机构;喷管前后段牵引连接机构包括至少两根喷管前后段固定线(5),一根喷管前后段固定线(5)的一端固定安装在喷管前段(1)的后端面顶端、另一端固定安装在喷管后段(3)的前端面底端,另一根喷管前后段固定线(5)的一端固定安装在喷管前段(1)的后端面底端、另一端固定安装在喷管后段(3)的前端面顶端;喷管中段牵引机构包括两根喷管中段牵拉线(6)和两件喷管中段线牵引部件,两根喷管中段牵拉线(6)和两件喷管中段线牵引部件均相对于喷管末段(4)的中轴线左右对称设置,两件喷管中段线牵引部件均固定安装在固定翼无人机的机体上,喷管中段线牵引部件包括喷管中段牵引电机和与喷管中段牵引电机安装连接的喷管中段牵引绞盘,两根喷管中段牵拉线(6)的一端均固定安装在喷管中段(2)的顶端或顶端,两根喷管中段牵拉线(6)的另一端分别固定缠绕在两件喷管中段线牵引部件的喷管中段牵引绞盘上;喷管末段牵引机构包括两根喷管末段牵拉线(7)和两件喷管末段线牵引部件,两根喷管末段牵拉线(7)和两件喷管末段线牵引部件均相对于喷管末段(4)的中轴线左右对称设置,两件喷管末段线牵引部件均固定安装在固定翼无人机的机体上,喷管末段线牵引部件包括喷管末段牵引电机和与喷管末段牵引电机安装连接的喷管末段牵引绞盘,两根喷管末段牵拉线(7)的一端均固定安装在喷管末段(4)前旋转段的顶端或底端,两根喷管末段牵拉线(7)的另一端分别固定缠绕在两件喷管末段线牵引部件的喷管末段牵引绞盘上。
2.根据权利要求1所述的微型三轴承矢量喷管的传动结构,其特征在于,喷管末段(4)的后固定段上还设有沿其径向方向左右对称伸出设置的引流管(8),引流管(8)的端部具有向下弯折的喷口结构,引流管(8)的根部与喷管末段(4)的后固定段贯通连接、且贯通连接位置设有包括启闭控制部件的引流盖板。
3.根据权利要求2所述的微型三轴承矢量喷管的传动结构,其特征在于,引流盖板的启闭控制部件是同矢量喷管牵引控制机构的牵引控制结构。
4.根据权利要求1或2或3所述的微型三轴承矢量喷管的传动结构,其特征在于,滚动轴承结构(9)包括前连接凸环(91)、后连接凸环(92)和连接定位环(93);前连接凸环(91)是与喷管前段(1)的后端面、或喷管中段(2)的后端面、或喷管末段(4)前旋转段的后端面为一体结构的凸环结构,后连接凸环(92)是与喷管中段(2)的前端面、或喷管后段(3)的前端面、或喷管末段(4)后固定段的前端面为一体结构的凸环结构,连接定位环(93)是配合套接在前连接凸环(91)和后连接凸环(92)上的环形结构,连接定位环(93)的前端和/或后端设有沿其径向方向向内弯折的贴合部,贴合部的后端面和/或前端面与前连接凸环(91)的前端面和/或后连接凸环(92)的后端面贴合连接,前连接凸环(91)和后连接凸环(92)通过连接定位环(93)扣合贴合连接,连接定位环(93)通过定位部件定位在管壁上,前连接凸环(91)的后端面和后连接凸环(92)的前端面上均设有对应配合设置的内凹半圆凹槽,连接定位环(93)贴合部与前连接凸环(91)的贴合面、和/或连接定位环(93)贴合部与后连接凸环(92)的贴合面上也设有对应配合设置的内凹半圆凹槽,内凹半圆凹槽内均设有配合的滚珠。
5.根据权利要求1或2或3所述的微型三轴承矢量喷管的传动结构,其特征在于,喷管中段牵拉线(6)、喷管末段牵拉线(7)的外部均设有钢丝套管,且钢丝套管沿牵拉走向通过定位部件定位在管壁上。
6.根据权利要求1或2或3所述的微型三轴承矢量喷管的传动结构,其特征在于,喷管中段牵拉线(6)、喷管末段牵拉线(7)是碳素线。
7.一种如权利要求1所述的微型三轴承矢量喷管的传动结构的控制方法,其特征在于,采用喷管前后段牵引连接机构、喷管中段牵引机构和喷管末段牵引机构的线牵引方式控制喷管中段(2)和喷管末段(4)的前旋转段的旋转方向实现改变喷管前段(1)的喷射方向,具体的:
同时控制左右对称设置的喷管中段牵引电机一个正转一个反转、带动左右对称设置的喷管中段牵引绞盘一个正转一个反转,同时控制左右对称设置的喷管末段牵引电机一个正转一个反转、带动左右对称设置的喷管末段牵引绞盘一个正转一个反转,喷管中段牵引绞盘一个正转一个反转过程中带动左右对称设置的喷管中段牵拉线(6)牵拉喷管中段(2)进行正方向旋转、喷管末段牵引绞盘一个正转一个反转过程中带动左右对称设置的喷管末段牵拉线(7)牵拉喷管末段(4)的前旋转段连同喷管后段(3)一起进行反方向旋转,喷管后段(3)反方向进行旋转的过程中通过喷管前后段固定线(5)带动喷管前段(1)同步反方向进行旋转,在相邻的喷管前段(1)、喷管中段(2)、喷管后段(3)的斜面结构的导向作用下实现喷管前段(1)喷射方向的改变。
说明书
技术领域
本发明涉及一种传动结构及其控制方法,具体是一种针对固定翼无人机的微型三轴承矢量喷管的传动结构及其控制方法,属于固定翼无人机技术领域。
背景技术
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机按用途可分为军用和民用,无人机在民用方面目前在航拍、农业、微型自拍、快递运输、灾难救援、测绘、新闻报道、电力巡检、救灾、影视拍摄等领域广泛应用,大大的拓展了无人机本身的用途。
无人机按飞行平台构型可分为固定翼无人机、旋翼无人机、无人飞艇、伞翼无人机、扑翼无人机等。民用小型无人机多以固定翼无人机和旋翼无人机为主。旋翼无人机是含直升机和类似直升机功能的无人机,主要靠顶部螺旋桨式产生升力,机翼结构复杂、但机动能力强,可满足特殊需要,由于螺旋桨式飞机具有稳定性极强、易于操控的优点,因此现在以大疆为首的无人机机制造企业均以旋翼无人机为主。而固定翼无人机是将产生升力的机翼固定平伸在机体两侧,固定翼无人机的巨大优点是搜索范围大、节省能源,据测算相同的电机驱动并配以相同的2000mAh的电池,旋翼无人机能只能飞行30分钟、而固定翼无人机能飞行90分钟,但由于固定翼无人机由于需要跑道与空旷场所的严格使用条件而受到使用限制。
固定翼无人机的垂直起降方式可以极大放宽固定翼无人机的使用限制。目前固定翼无人机垂直起降通常是利用旋转电机的方式进行垂直起降,但是这种外露式的螺旋桨使无人机的安全性大大降低;还有类似美国F35战斗机的轴对称矢量喷管的结构,即在轴对称矢量喷管的各个关节处加设主动齿轮和从动齿圈结构、通过控制主动齿轮的旋转带动从动齿圈旋转实现矢量喷管的喷射方向变化,但由于驱动电机、主动齿轮和从动齿圈的设置大大增加了轴对称矢量喷管的重量、无法解决矢量喷管的轻量化问题,因此造成现有的采用轴对称矢量喷管结构的固定翼无人机通常续航能力大打折扣。
发明内容
针对上述现有技术存在的问题,本发明提供一种微型三轴承矢量喷管的传动结构及其控制方法,能够在实现固定翼无人机垂直起降的前提下解决矢量喷管的轻量化问题,进而实现增加固定翼无人机的续航能力。
为实现上述目的,本微型三轴承矢量喷管的传动结构包括轴对称矢量喷管和矢量喷管牵引控制机构;
所述的轴对称矢量喷管包括喷管前段、喷管中段、喷管后段和喷管末段,喷管前段、喷管中段和喷管后段均是横截面为椭圆形的管型结构、且椭圆形满足长轴×cos22.5°=短轴的条件,喷管末段是横截面为圆形的管型结构,喷管前段的前端具有横截面为圆形的缩口喷口结构,喷管前段的后端面是与喷管前段的中轴线呈22.5°夹角的斜面结构,喷管中段的前端面和后端面均是与喷管中段的中轴线呈22.5°夹角的斜面结构、且喷管中段的前端面的中心线和后端面的中心线空间相交设置,喷管后段的前端面是与喷管后段的中轴线呈22.5°夹角的斜面结构,喷管前段的后端面与喷管中段的前端面之间通过滚动轴承结构连接,喷管中段的后端面与喷管后段的前端面之间通过滚动轴承结构连接,喷管末段包括同轴设置的前旋转段和后固定段,喷管后段的后端与喷管末段前旋转段的前端圆滑过渡固定连接,喷管末段后固定段固定安装在固定翼无人机的机体上,喷管末段前旋转段的后端面通过沿其周向方向设置的滚动轴承结构与喷管末段后固定段的前端面安装连接;
所述的矢量喷管牵引控制机构包括喷管前后段牵引连接机构、喷管中段牵引机构和喷管末段牵引机构;喷管前后段牵引连接机构包括至少两根喷管前后段固定线,一根喷管前后段固定线的一端固定安装在喷管前段的后端面顶端、另一端固定安装在喷管后段的前端面底端,另一根喷管前后段固定线的一端固定安装在喷管前段的后端面底端、另一端固定安装在喷管后段的前端面顶端;喷管中段牵引机构包括两根喷管中段牵拉线和两件喷管中段线牵引部件,两根喷管中段牵拉线和两件喷管中段线牵引部件均相对于喷管末段的中轴线左右对称设置,两件喷管中段线牵引部件均固定安装在固定翼无人机的机体上,喷管中段线牵引部件包括喷管中段牵引电机和与喷管中段牵引电机安装连接的喷管中段牵引绞盘,两根喷管中段牵拉线的一端均固定安装在喷管中段的顶端或顶端,两根喷管中段牵拉线的另一端分别固定缠绕在两件喷管中段线牵引部件的喷管中段牵引绞盘上;喷管末段牵引机构包括两根喷管末段牵拉线和两件喷管末段线牵引部件,两根喷管末段牵拉线和两件喷管末段线牵引部件均相对于喷管末段的中轴线左右对称设置,两件喷管末段线牵引部件均固定安装在固定翼无人机的机体上,喷管末段线牵引部件包括喷管末段牵引电机和与喷管末段牵引电机安装连接的喷管末段牵引绞盘,两根喷管末段牵拉线的一端均固定安装在喷管末段前旋转段的顶端或底端,两根喷管末段牵拉线的另一端分别固定缠绕在两件喷管末段线牵引部件的喷管末段牵引绞盘上。
作为本发明的进一步改进方案,喷管末段的后固定段上还设有沿其径向方向左右对称伸出设置的引流管,引流管的端部具有向下弯折的喷口结构,引流管的根部与喷管末段的后固定段贯通连接、且贯通连接位置设有包括启闭控制部件的引流盖板。
作为本发明的一种实施方式,引流盖板的启闭控制部件是同矢量喷管牵引控制机构的牵引控制结构。
作为本发明的进一步改进方案,滚动轴承结构包括前连接凸环、后连接凸环和连接定位环;前连接凸环是与喷管前段的后端面、或喷管中段的后端面、或喷管末段前旋转段的后端面为一体结构的凸环结构,后连接凸环是与喷管中段的前端面、或喷管后段的前端面、或喷管末段后固定段的前端面为一体结构的凸环结构,连接定位环是配合套接在前连接凸环和后连接凸环上的环形结构,连接定位环的前端和/或后端设有沿其径向方向向内弯折的贴合部,贴合部的后端面和/或前端面与前连接凸环的前端面和/或后连接凸环的后端面贴合连接,前连接凸环和后连接凸环通过连接定位环扣合贴合连接,连接定位环通过定位部件定位在管壁上,前连接凸环的后端面和后连接凸环的前端面上均设有对应配合设置的内凹半圆凹槽,连接定位环贴合部与前连接凸环的贴合面、和/或连接定位环贴合部与后连接凸环的贴合面上设有对应配合设置的内凹半圆凹槽,内凹半圆凹槽内均设有配合的滚珠。
作为本发明的进一步改进方案,喷管中段牵拉线、喷管末段牵拉线的外部均设有钢丝套管,且钢丝套管沿牵拉走向通过定位部件定位在管壁上。
作为本发明的一种实施方式,喷管中段牵拉线、喷管末段牵拉线是碳素线。
一种微型三轴承矢量喷管传动结构的控制方法,采用喷管前后段牵引连接机构、喷管中段牵引机构和喷管末段牵引机构的线牵引方式控制喷管中段和喷管末段的前旋转段的旋转方向实现改变喷管前段的喷射方向;具体的控制方法:同时控制左右对称设置的喷管中段牵引电机一个正转一个反转、带动左右对称设置的喷管中段牵引绞盘一个正转一个反转,同时控制左右对称设置的喷管末段牵引电机一个正转一个反转、带动左右对称设置的喷管末段牵引绞盘一个正转一个反转,喷管中段牵引绞盘一个正转一个反转过程中带动左右对称设置的喷管中段牵拉线牵拉喷管中段进行正方向旋转、喷管末段牵引绞盘一个正转一个反转过程中带动左右对称设置的喷管末段牵拉线牵拉喷管末段的前旋转段连同喷管后段一起进行反方向旋转,喷管后段反方向进行旋转的过程中通过喷管前后段固定线带动喷管前段同步反方向进行旋转,在相邻的喷管前段、喷管中段、喷管后段的斜面结构的导向作用下实现喷管前段喷射方向的改变。
与现有技术相比,本微型三轴承矢量喷管的传动结构可通过改变喷管前段的方向改变涡轮风扇产生的气流的方向、进而改变推力方向,固定翼无人机起飞或降落时可将喷管前段从水平方向变为垂直方向,进而实现垂直升起模式或垂直降落模式下的灵活操控,当固定翼无人机起飞后可将喷管前段从垂直方向变为水平方向,进而恢复为常规固定翼无人机的飞行模式;由于采用喷管前后段牵引连接机构、喷管中段牵引机构和喷管末段牵引机构的线牵引方式,而线牵引部件可以固定安装在固定翼无人机的机体上,因此一方面大大降低了轴对称矢量喷管的制造复杂程度、降低制造成本,另一方面可以避免因安装旋转驱动部件而造成的轴对称矢量喷管具有较大重量的问题、实现轻量化和降低功耗,再一方面可以实现轴对称矢量喷管旋转变形复杂动作的极大简化,使微型矢量喷口的实用化成为了可能,进而实现解决在电池容量一定的情况下固定翼无人机飞行距离较短的问题和固定翼无人机起飞要求较高的问题。
附图说明
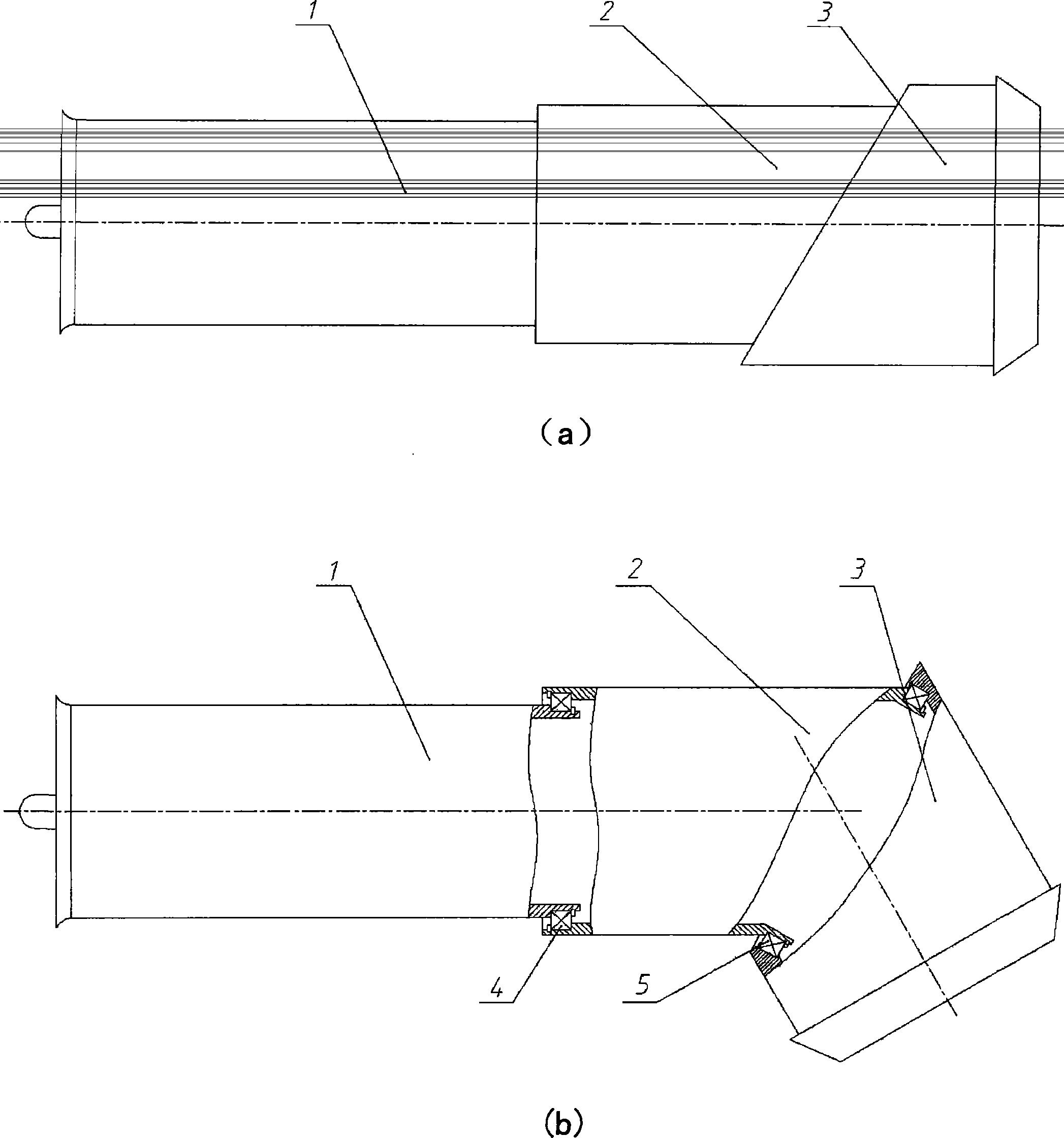
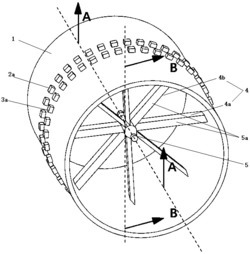
图1是轴对称矢量喷管未翻折时的三维结构示意图;
图2是轴对称矢量喷管翻折90°后的三维结构示意图;
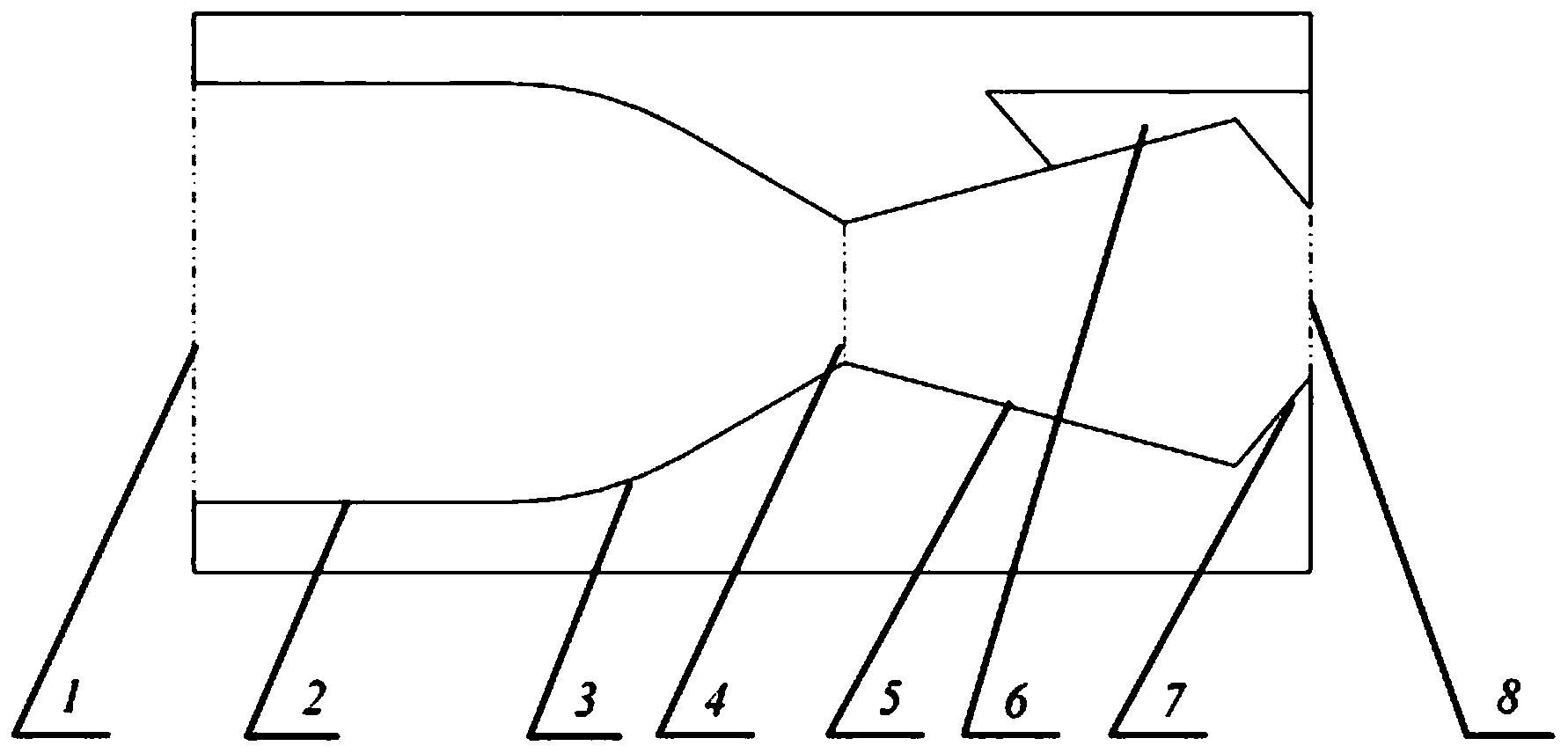
图3是微型三轴承矢量喷管的传动结构的侧面结构示意图;
图4是图3的后视图;
图5是喷管前段未翻折时的三维结构示意图(图中虚线箭头的方向为牵拉线的牵拉方向);
图6是喷管前段翻折45°时的三维结构示意图(图中虚线箭头的方向为牵拉线的牵拉方向);
图7是喷管前段翻折90°时的三维结构示意图(图中虚线箭头的方向为牵拉线的牵拉方向);
图8是滚动轴承结构的剖面结构示意图;
图9是本发明轴对称矢量喷管的喷管前段、喷管中段和喷管后段的横截面结构示意图。
图中:1、喷管前段,2、喷管中段,3、喷管后段,4、喷管末段,5、前后段固定线,6、喷管中段牵拉线,7、喷管末段牵拉线,8、引流管,9、滚动轴承结构,91、前连接凸环,92、后连接凸环,93、连接定位环。
具体实施方式
下面结合附图对本发明做进一步说明(以下以图1的左侧方向为前方进行描述,以在侧视方向上喷管前段1、喷管中段2、喷管后段3上的斜面结构与管壁的夹角呈钝角的端部为斜面结构的顶端进行描述,以在侧视方向上喷管前段1、喷管中段2、喷管后段3上的斜面结构与管壁的夹角呈锐角的端部为斜面结构的底端进行描述)。
如图1至图4所示,本微型三轴承矢量喷管的传动结构包括轴对称矢量喷管和矢量喷管牵引控制机构。
所述的轴对称矢量喷管包括喷管前段1、喷管中段2、喷管后段3和喷管末段4,如图9所示,喷管前段1、喷管中段2和喷管后段3均是横截面为椭圆形的管型结构、且椭圆形满足{长轴×cos22.5°=短轴}此条件,喷管末段4是横截面为圆形的管型结构,喷管前段1的前端具有横截面为圆形的缩口喷口结构,喷管前段1的后端面是与喷管前段1的中轴线呈22.5°夹角的斜面结构,喷管中段2的前端面和后端面均是与喷管中段2的中轴线呈22.5°夹角的斜面结构、且喷管中段2的前端面的中心线和后端面的中心线空间相交设置,喷管后段3的前端面是与喷管后段3的中轴线呈22.5°夹角的斜面结构,由于椭圆形满足{长轴×cos22.5°=短轴}此条件,因此在各端面的垂直方向上看各端面是圆形端面,喷管前段1的后端面与喷管中段2的前端面之间通过滚动轴承结构9连接,喷管中段2的后端面与喷管后段3的前端面之间通过滚动轴承结构9连接,喷管末段4包括同轴设置的前旋转段和后固定段,喷管后段3的后端与喷管末段4前旋转段的前端圆滑过渡固定连接,喷管末段4后固定段固定安装在固定翼无人机的机体上,喷管末段4前旋转段的后端面通过沿其周向方向设置的滚动轴承结构9与喷管末段4后固定段的前端面安装连接。
所述的矢量喷管牵引控制机构包括喷管前后段牵引连接机构、喷管中段牵引机构和喷管末段牵引机构;如图3所示,喷管前后段牵引连接机构包括至少两根喷管前后段固定线5,一根喷管前后段固定线5的一端固定安装在喷管前段1的后端面顶端、另一端固定安装在喷管后段3的前端面底端,另一根喷管前后段固定线5的一端固定安装在喷管前段1的后端面底端、另一端固定安装在喷管后段3的前端面顶端;如图4所示,喷管中段牵引机构包括两根喷管中段牵拉线6和两件喷管中段线牵引部件(为便于显示连接关系、图中只示出一根喷管中段牵拉线6),两根喷管中段牵拉线6和两件喷管中段线牵引部件均相对于喷管末段4的中轴线左右对称设置,两件喷管中段线牵引部件均固定安装在固定翼无人机的机体上,喷管中段线牵引部件包括喷管中段牵引电机和与喷管中段牵引电机安装连接的喷管中段牵引绞盘,通过控制喷管中段牵引电机的正反转可以实现喷管中段牵引绞盘的正反转,两根喷管中段牵拉线6的一端均固定安装在喷管中段2的顶端或顶端,两根喷管中段牵拉线6的另一端分别固定缠绕在两件喷管中段线牵引部件的喷管中段牵引绞盘上,通过喷管中段牵引绞盘的一正一反配合旋转可以实现喷管中段牵拉线6牵拉喷管中段2进行旋转或复位;喷管末段牵引机构包括两根喷管末段牵拉线7和两件喷管末段线牵引部件(为便于显示连接关系、图中只示出一根喷管末段牵拉线7),两根喷管末段牵拉线7和两件喷管末段线牵引部件均相对于喷管末段4的中轴线左右对称设置,两件喷管末段线牵引部件均固定安装在固定翼无人机的机体上,喷管末段线牵引部件包括喷管末段牵引电机和与喷管末段牵引电机安装连接的喷管末段牵引绞盘,通过控制喷管末段牵引电机的正反转可以实现喷管末段牵引绞盘的正反转,两根喷管末段牵拉线7的一端均固定安装在喷管末段4的前旋转段的顶端或底端,两根喷管末段牵拉线7的另一端分别固定缠绕在两件喷管末段线牵引部件的喷管末段牵引绞盘上,通过喷管末段牵引绞盘的一正一反配合旋转可以实现喷管末段牵拉线7牵拉喷管末段4的前旋转段进行旋转或复位。
本微型三轴承矢量喷管的传动结构安装在固定翼无人机上使用时,将喷管末段4的后固定段与固定翼无人机的涡轮风扇的出口端连通连接,即可通过改变喷管前段1喷口结构的方向改变涡轮风扇产生的气流的方向、进而改变推力方向。固定翼无人机起飞或降落时可将喷管前段1喷口结构从水平方向变为垂直方向,进而实现垂直升起模式或垂直降落模式下的灵活操控,当固定翼无人机起飞后可将喷管前段1喷口结构从垂直方向变为水平方向,进而恢复为常规固定翼无人机的飞行模式。
具体的实现机理如下:如图5所示,固定翼无人机初始状态时喷管前段1呈水平状态,此时同时控制喷管中段牵引电机一个正转一个反转、同时控制喷管末段牵引电机一个正转一个反转,进而实现喷管中段牵引绞盘一个正转一个反转、喷管末段牵引绞盘一个正转一个反转,从而实现喷管中段牵拉线6牵拉喷管中段2沿如图所示的右箭头顺时针方向进行旋转,同时喷管末段牵拉线7牵拉喷管末段4的前旋转段带动喷管后段3沿如图所示的左箭头逆时针方向进行旋转,如图6所示,由于喷管前段1和喷管后段3通过喷管前后段固定线5进行连接,因此喷管后段3沿如图所示的左箭头逆时针方向进行旋转的同时、喷管前段1也沿如图所示的左箭头逆时针方向进行旋转,喷管前段1的喷口结构即沿如图所示的下箭头方向发生翻折,当喷管中段2顺时针旋转45°、喷管末段4的前旋转段逆时针旋转45°后停止喷管中段牵引电机和喷管末段牵引电机的旋转,此时即如图7所示,喷管中段2相对于喷管后段3旋转90°,即实现喷管前段1的水平状态变换为垂直状态,打开涡轮风扇产生的气流在喷管前段1喷口结构的导向作用下产生举升力,举升力克服固定翼无人机的自身重力实现固定翼无人机的垂直升起;当固定翼无人机升起至设定高度后,可同时反向控制喷管中段牵引电机和喷管末段牵引电机动作实现喷管中段2逆时针旋转、喷管末段4的前旋转段顺时针旋转,进而改变喷管前段1的喷射方向、改变推力方向,实现固定翼无人机的飞行。固定翼无人机垂直降落过程与垂直升起过程类似,在此不再详述。
本微型三轴承矢量喷管的传动结构通过牵引线以绞盘为主要的驱动力,通过对线牵引部件的外置布置减轻了轴对称矢量喷管的整体重量,使其可以实现更加高效的旋转动作,克服了普遍存在难以解决的喷管结构复杂的难题,可以使垂直起降的涵道式固定翼无人机成为一种更加可行的无人机方案。
为了增加固定翼无人机垂直升降过程中的稳定性,作为本发明的进一步改进方案,如图1、图2所示,喷管末段4的后固定段上还设有沿其径向方向左右对称伸出设置的引流管8,引流管8的端部具有向下弯折的喷口结构,引流管8的根部与喷管末段4的后固定段贯通连接、且贯通连接位置设有包括启闭控制部件的引流盖板,引流盖板的启闭控制部件可以采用电磁阀门控制结构、也可以采用同矢量喷管牵引控制机构的牵引控制结构、或者其他控制启闭结构。当喷管前段1呈垂直的升降状态时,可以通过启闭控制部件控制打开引流盖板,进而控制引流管8的排气量,两侧的引流管8不仅可以使固定翼无人机垂直起降时更加平稳,而且还可以通过调整两侧引流管8排气量的大小改变固定翼无人机两侧的推力,进而提高固定翼无人机的灵活性。
为了进一步实现轻量化,且为了简化所需的零件数量、便于安装,作为本发明的进一步改进方案,如图8所示,滚动轴承结构9包括前连接凸环91、后连接凸环92和连接定位环93;前连接凸环91是与喷管前段1的后端面、或喷管中段2的后端面、或喷管末段4前旋转段的后端面为一体结构的凸环结构,后连接凸环92是与喷管中段2的前端面、或喷管后段3的前端面、或喷管末段4后固定段的前端面为一体结构的凸环结构,连接定位环93是配合套接在前连接凸环91和后连接凸环92上的环形结构,连接定位环93的前端和/或后端设有沿其径向方向向内弯折的贴合部,贴合部的后端面和/或前端面与前连接凸环91的前端面和/或后连接凸环92的后端面贴合连接,前连接凸环91和后连接凸环92通过连接定位环93扣合贴合连接,连接定位环93通过定位部件定位在管壁上,定位部件可以是配合设置的螺钉和压板结构、也可以是可以卡接钢丝套管的定位卡环结构,前连接凸环91的后端面和后连接凸环92的前端面上均设有对应配合设置的内凹半圆凹槽,连接定位环93贴合部与前连接凸环91的贴合面、和/或连接定位环93贴合部与后连接凸环92的贴合面上也设有对应配合设置的内凹半圆凹槽,内凹半圆凹槽内均设有配合的滚珠。前连接凸环91、后连接凸环92和连接定位环93的设置极大简化了喷管的结构、易于加工制造,喷管可直接3D打印成型,批量化生产可大大降低成本。
由于喷管中段牵拉线6、喷管末段牵拉线7牵拉过程中是贴靠在管壁上,因此为了防止喷管中段牵拉线6、喷管末段牵拉线7的磨损,同时为了实现对喷管中段牵拉线6、喷管末段牵拉线7的定位导向,作为本发明的进一步改进方案,喷管中段牵拉线6、喷管末段牵拉线7的外部均设有钢丝套管,且钢丝套管沿牵拉走向通过定位部件定位在管壁上,定位部件可以是配合设置的螺钉和压板结构、也可以是可以卡接钢丝套管的定位卡环结构。
为了保证喷管中段2、喷管末段4的前旋转段的准确旋转,进而实现喷管前段1的准确翻折,喷管中段牵拉线6、喷管末段牵拉线7应具有抗拉强度高、耐磨、柔软但延展性弱的特点,比如碳素线、碳素弹簧钢丝等。
安装有本微型三轴承矢量喷管的传动结构的固定翼无人机在平飞模式时喷管前段1呈水平状态,矢量喷管牵引控制机构并不需要有任何的动作;在垂直起降模式时,在矢量喷管牵引控制机构的控制下,喷管前段1实现90°旋转的同时可以改变引流盖板的打开角度控制引流管8的排气量,从而可以实现固定翼无人机的左右漂移,改变固定翼无人机涡轮风扇的转速可以实现固定翼无人机的前后移动,当举升力与重力相互平衡时可以实现固定翼无人机的悬停;在短距起降模式时,喷管前段1呈45°倾角状态,可以极大程度的减小固定翼无人机的起飞或降落距离对于场地的要求。
一种微型三轴承矢量喷管的传动结构及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0